




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
马铃薯内部颜色数字化无损检测及黄白芯薯快速判别
[王威 , 聂森
, 聂森* , 李永玉, 彭彦坤, 马劭瑾, 张悦湘]
, 聂森, 李永玉, 彭彦坤, 马劭瑾, 张悦湘]
|
|


作者简介: 王 威, 1999年生,中国农业大学工学院,国家农产品加工技术装备研发分中心博士研究生e-mail: wang13033989056@163.com
颜色是农产品的重要品质指标, 马铃薯内部颜色直接影响其加工产品的感官品质, 数字化无损快速检测马铃薯内部颜色指标, 并对黄芯薯和白芯薯进行快速分类, 对我国马铃薯主食化产业的进一步推进以及预制菜产业的快速崛起均具有重要意义。 本研究以马铃薯内部颜色的快速无损数字化表征为目的, 利用实验室自行创制的基于微型光谱仪的便携式马铃薯多品质无损检测装置和基于离散光谱传感器的掌上式马铃薯多品质无损检测装置, 选用不同产地26个品种共209个马铃薯样本, 分别采集其连续光谱和离散光谱数据, 并利用色差仪测定马铃薯样本的内部颜色参数 L*、 a*、 b*标准值。 首先, 基于色差仪测定的209个马铃薯 L*、 a*、 b*标准值, 建立黄白芯薯SVM分类判别模型, 确定了黄白芯马铃薯判别阈值平面, 作为下一步无损快速判别黄白芯薯判别依据。 其次, 基于便携式连续光谱装置采集的209个马铃薯样品的连续光谱, 经SNV预处理再结合随机蛙跳算法(RF)筛选200个特征波长建立了马铃薯 L*、 a*、 b*偏最小二乘回归(PLSR)预测模型, 其验证集 L*、 a*、 b*均方根误差分别为1.023 5、 0.052 5、 1.042 7; 基于掌上式离散光谱装置采集的209个马铃薯样品的离散光谱, 经SNV预处理后建立了马铃薯 L*、 a*、 b*的PLSR预测模型, 其验证集 L*、 a*、 b*均方根误差分别为1.278 8、 0.081 6、 1.407 1。 结果表明, 基于两个装置建立的马铃薯内部颜色参数预测模型均可以满足马铃薯内部颜色现场数字化快速无损检测需求。 最后, 选取未参与建模的26个品种共52个样本, 分别对两个装置马铃薯内部颜色 L*、 a*、 b*预测值进行了外部验证, 基于便携式连续光谱装置的马铃薯 L*、 a*、 b*的最大残差绝对值分别为2.617 3、 0.141 3、 2.779 1, 残差平均值分别为0.857 7、 0.049 0以及0.697 2; 基于掌上式离散光谱装置的马铃薯 L*、 a*、 b*最大残差绝对值分别为3.262 8、 0.203 4、 3.519 5, 残差平均值分别为1.093 0、 0.066 7、 1.268 8。 基于两个装置对52个马铃薯样本的 L*、 a*、 b*预测值, 依据前面建立的黄白芯马铃薯判别阈值平面, 进行了马铃薯黄白芯无损快速判别, 结果显示, 基于便携式连续光谱装置的判别正确率为92.31%, 基于掌上式离散光谱装置的判别正确率为86.54%。 该技术可以实现马铃薯内部颜色数字化无损检测及黄白芯薯的现场实时快速判别。 对马铃薯种植、 加工、 销售等产业链提供技术支持。
Color is an important quality indicator for agricultural products. The internal color of potatoes directly affects the sensory quality of their processed products. The rapid and non-destructive digital detection of the internal color of potatoes, as well as the quick classification of yellow-core and white-core potatoes, is of significant importance for advancing China's staple potato industry and the rapid rise of the prepared food industry. This study aims to achieve rapid, non-destructive digital characterization of the internal color of potatoes. It utilizes two self-developed, portable, multi-quality non-destructive detection devices based on a mini-spectrometer and a discrete spectral sensor: one is a laboratory-based, portable multi-quality non-destructive detection device for potatoes, and the other is a handheld, multi-quality non-destructive detection device for potatoes. A total of 209 potato samples from 26 different varieties, grown in various regions, were selected. Continuous spectral and discrete spectral data were collected, and the internal color parameters L*, a* and b* of the potato samples were measured using a colorimeter. First, based on the L*, a* and b* values measured by the colorimeter, an SVM classification model was established to distinguish between yellow-core and white-core potatoes. The threshold plane for distinguishing between yellow- and white-core potatoes was determined, which will serve as the basis for the next step in the non-destructive and rapid identification of yellow- and white-core potatoes. Secondly, based on the continuous spectral data collected by the portable continuous spectral device from the 209 potato samples, SNV preprocessing combined with the Random Frog Jump (RF) algorithm was used to select 200 characteristic wavelengths to establish a PLSR (Partial Least Squares Regression) prediction model for the L*, a* and b* parameters of potatoes. The root mean square errors (RMSE) for the validation set of L*, a* and b* were 1.278 8, 0.081 6, and 1.407 1, respectively. Similarly, for the discrete spectral data collected by the handheld spectral device, after SNV preprocessing, PLSR prediction models for the L*, a* and b* parameters of potatoes were also established. The RMSE for the validation set of L*, a* and b* were 1.278 8, 0.081 6, and 1.407 1, respectively. The results showed that the prediction models for the internal color parameters of potatoes established with both devices can meet the demand for rapid, non-destructive, digital detection of potato internal color in the field. Finally, 52 potato samples from 26 varieties, which were not involved in model training, were selected for external validation of the L*, a* and b* predicted values using both devices. For the portable continuous spectral device, the maximum absolute residuals for L*, a* and b* were 2.617 3, 0.141 3, and 2.779 1, respectively, and the mean residuals were 0.857 7, 0.049 0, and 0.697 2, respectively. For the handheld discrete spectral device, the maximum absolute residuals for L*, a* and b* were 3.262 8, 0.203 4, and 3.519 5, respectively, and the mean residuals were 1.093 0, 0.066 7, and 1.268 8, respectively. Based on the L*, a* and b* predicted values from both devices, rapid non-destructive identification of yellow and white-core potatoes was performed using the previously established classification threshold plane. The classification accuracy for yellow and white-core potatoes was 92.31% for the portable continuous spectral device and 86.54% for the handheld discrete spectral device. This technology enables the rapid, non-destructive, and real-time digital detection of potato internal color, as well as the quick classification of yellow- and white-core potatoes in the field. It provides technical support for the entire potato industry chain, including planting, processing, and sales.
随着我国马铃薯主食化产业的进一步推进和预制菜产业的快速崛起[1], 马铃薯的加工应用领域越来越广泛。 颜色是人类第一次用数学定量地计算感官受外界刺激传到大脑的感觉, 是所有农畜产品的重要品质指标。 颜色不同的马铃薯展现出不同的质地和口感特征, 黄芯薯通常富含类胡萝卜素和花青素具有更好的抗氧化性, 白芯薯其较高的淀粉含量和适中的硬度多用于制作油炸类产品。 马铃薯内部颜色指标直接影响其加工产品的感官品质, 数字化无损快速检测马铃薯内部颜色参数, 并对黄芯薯和白芯薯进行无损快速分类, 对我国马铃薯产业健康发展具有重要意义。
马铃薯内部品质无损检测领域国内外学者进行了诸多研究[2, 3, 4, 5, 6, 7, 8, 9], 主要集中在基于可见/近红外光谱的马铃薯干物质含量、 淀粉含量、 黑心病等品质指标的无损检测。 例如, 通过三维分析得出马铃薯干物质含量关于检测点坐标值的偏最小二乘回归模型决定系数为0.912 3[2]; 马铃薯还原糖含量的多元非线性回归模型, 决定系数为0.833 6[4]; 马铃薯黑心病的偏最小二乘判别模型的判别正确率为98.46%[7]。 随着光谱仪小型化的发展, 针对马铃薯行业实际检测需求, 作者实验室王凡等[9]针对马铃薯淀粉、 干物质等主要品质指标开发了一种基于小型光谱仪的便携式马铃薯多品质无损检测装置(以下简称“ 便携式连续光谱装置” ), 在一定程度上为马铃薯品质无损检测提供了可能性, 但是光谱仪相对来说较为精密昂贵成本高, 在马铃薯种植加工产业内广泛推广应用有一定的局限性。 为此, 作者基于离散光谱传感器研制了一种低成本掌上式马铃薯多品质无损检测装置(以下简称“ 掌上式离散光谱装置” )[10], 该装置的马铃薯干物质含量、 淀粉含量预测模型验证集均方根误差(RMSEV)分别为1.05%和1.02%。 但是, 目前马铃薯内部颜色指标的数字化无损快速检测以及黄芯薯和白芯薯的无损快速判别分类领域仍属于空白, 颜色是马铃薯加工过程中的重要品质指标, 实现马铃薯内部颜色的数字化实时快速无损检测, 对推动马铃薯加工产品的标准化和产业化具有重要意义。
针对马铃薯种植、 加工、 销售等产业链对马铃薯内部颜色数字化无损快速检测实际需求, 利用作者团队自行创制的基于连续光谱的便携式装置[9]和基于离散光谱的掌上装置[10], 探究马铃薯内部颜色敏感波长, 建立马铃薯内部颜色参数L* 、 a* 、 b* 值无损定量预测模型, 并植入装置首次实现马铃薯内部颜色数字化无损快速检测, 并对黄芯薯和白芯薯进行无损判别分类, 为马铃薯加工行业标准化和产业升级提供技术支撑。
选用不同产地26个品种共209个马铃薯样本, 其中白芯薯13个品种共102个样本, 黄芯薯13个品种共107个样本。 各品种及样本个数如表1所示。
| 表1 不同类别马铃薯品种及其样本数量 Table 1 Different categories of potato varieties and their sample sizes |
其中白芯薯品种中薯三号如图1(a)所示, 黄芯薯品种荷兰黄心如图1(b)所示。 所有样品在4 ℃条件下冷藏保存, 为了消除温度对实验结果的影响, 所有样本在采集光谱前均放置于室温环境中至少24 h。
 | 图1 马铃薯内部颜色分类样本示意图 (a): 白芯马铃薯样品; (b): 黄芯马铃薯样品Fig.1 Schematic diagram of meat color classification sample (a): White-heart potato samples; (b): Yellow-heart potato samples |
1.2.1 光谱采集
利用实验室自行研制的便携式连续光谱装置[9]和掌上式离散光谱装置[10], 分别采集了马铃薯局部透射光谱。 便携式连续光谱装置具有小巧的体积(150 mm× 80 mm× 150 mm), 采用了Ocean Optics开发的微型近红外光谱仪(STS, 635~1 125 nm), 光谱仪包含1 024个像素点, 其高信噪比(超过1 500)和优良的分辨率(1.5 nm)能够保证较为准确的光谱信息采集[11, 12, 13], 装置如图2(a)所示。 掌上式离散光谱装置采用离散光谱传感器(AS7265x, 410~940 nm), 包含三个传感器组件(AS72651、 AS72652和AS72653), 构成一个离散光谱传感器, 提供18个离散波长点(410、 435、 460、 485、 510、 535、 560、 585、 610、 645、 680、 705、 730、 760、 810、 860、 900和940 nm), 能够覆盖从可见光到近红外范围的光谱, 显著减少了装置体积(120 mm× 80 mm× 80 mm)和成本, 如图2(b)所示。
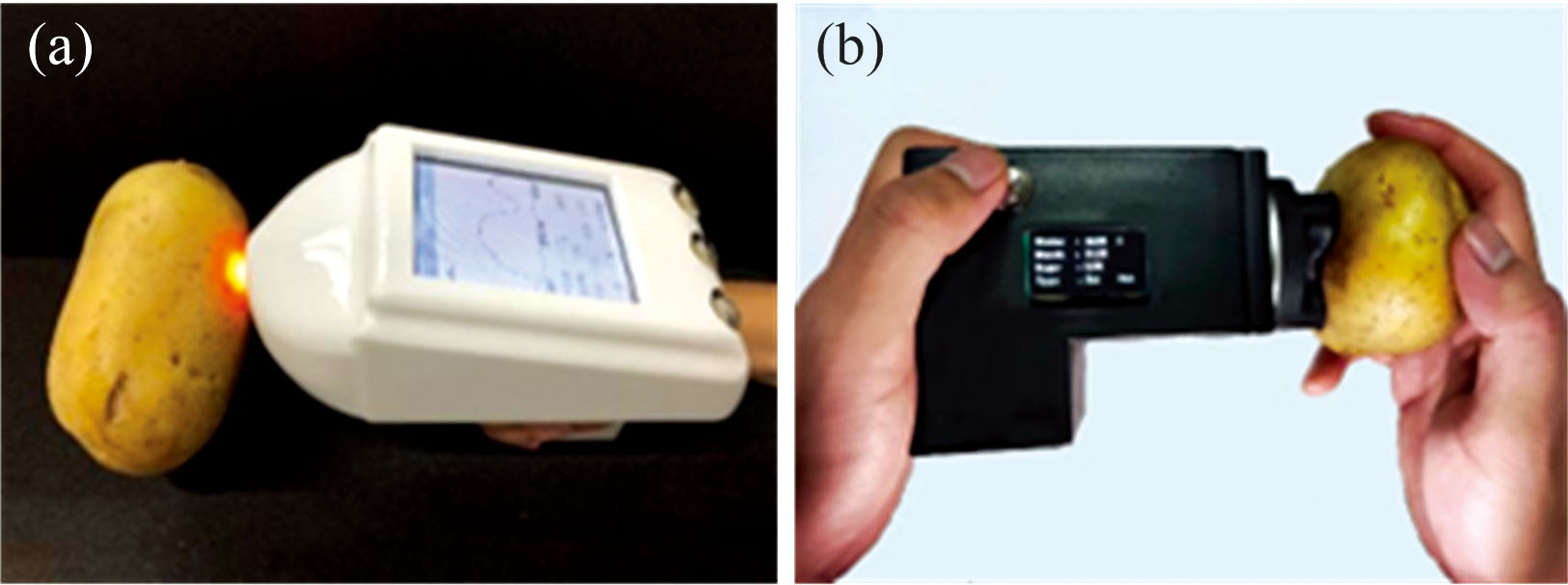 | 图2 检测装置实物图 (a): 便携式连续光谱装置; (b): 掌上式离散光谱装置Fig.2 Physical picture of detection device (a): Portable continuous spectroscopy device; (b): Handheld discrete spectroscopy device |
采集马铃薯光谱时为确保检测装置的稳定性, 装置均分别预热20 min。 马铃薯样品的采集区域避开明显的缺陷部位, 选择较为光滑的赤道部位进行光谱采集, 共选取4个采集点, 最终以这4个点的平均光谱作为该样品的原始光谱。
1.2.2 马铃薯内部颜色参数标准值测定
采用CS-200色差仪(杭州彩谱科技有限公司), 选择马铃薯赤道截面的五个位置, 分别采集L* 、 a* 、 b* 值, 取其平均值作为样本的颜色数据。 L* 值表示颜色的明亮度, a* 值表示颜色的红绿值, b* 值表示颜色的黄蓝值。 色差仪使用前进行了校准, 以避免颜色采集误差。
2.1.1 马铃薯样品L* 、 a* 、 b* 标准值分析
基于CS-200色差仪检测的26个品种209个马铃薯样本的内部颜色参数L* 、 a* 、 b* 值如表2所示, 黄芯薯与白芯薯的b* 值有明显的区别, 白芯薯b* 值显著低于黄芯薯, 而L* 与a* 值差异不显著, 表明b* 方向的黄蓝分量对两种薯内部颜色的影响更为直接。
| 表2 马铃薯L* 、 a* 、 b* 值范围表 Table 2 Table of the range of L* , a* , b* for potatoes |
2.1.2 基于L* 、 a* 、 b* 标准值的黄白芯马铃薯判别阈值确定
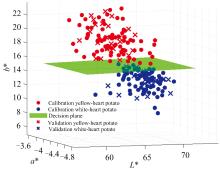
基于209个马铃薯样品的内部颜色参数L* 、 a* 、 b* 标准值, 结合支持向量机(SVM)分类判别方法, 对26种不同品种的黄白芯马铃薯进行了聚类分析, 采用Kennard-Stone算法(KS)将样本按3:1的比例划分为校正集和验证集, 判别模型结果如图3所示, 黄芯薯与白芯薯判别正确率均为100%, 所得决策平面即为黄白芯马铃薯分类阈值平面, 表达式为式(1)
综上所述, 只要无损获取马铃薯内部颜色参数L* 、 a* 、 b* 值, 依据该阈值平面即可以实现黄白芯马铃薯的无损快速判别, 为马铃薯产业化加工提供重要品质参数指标。
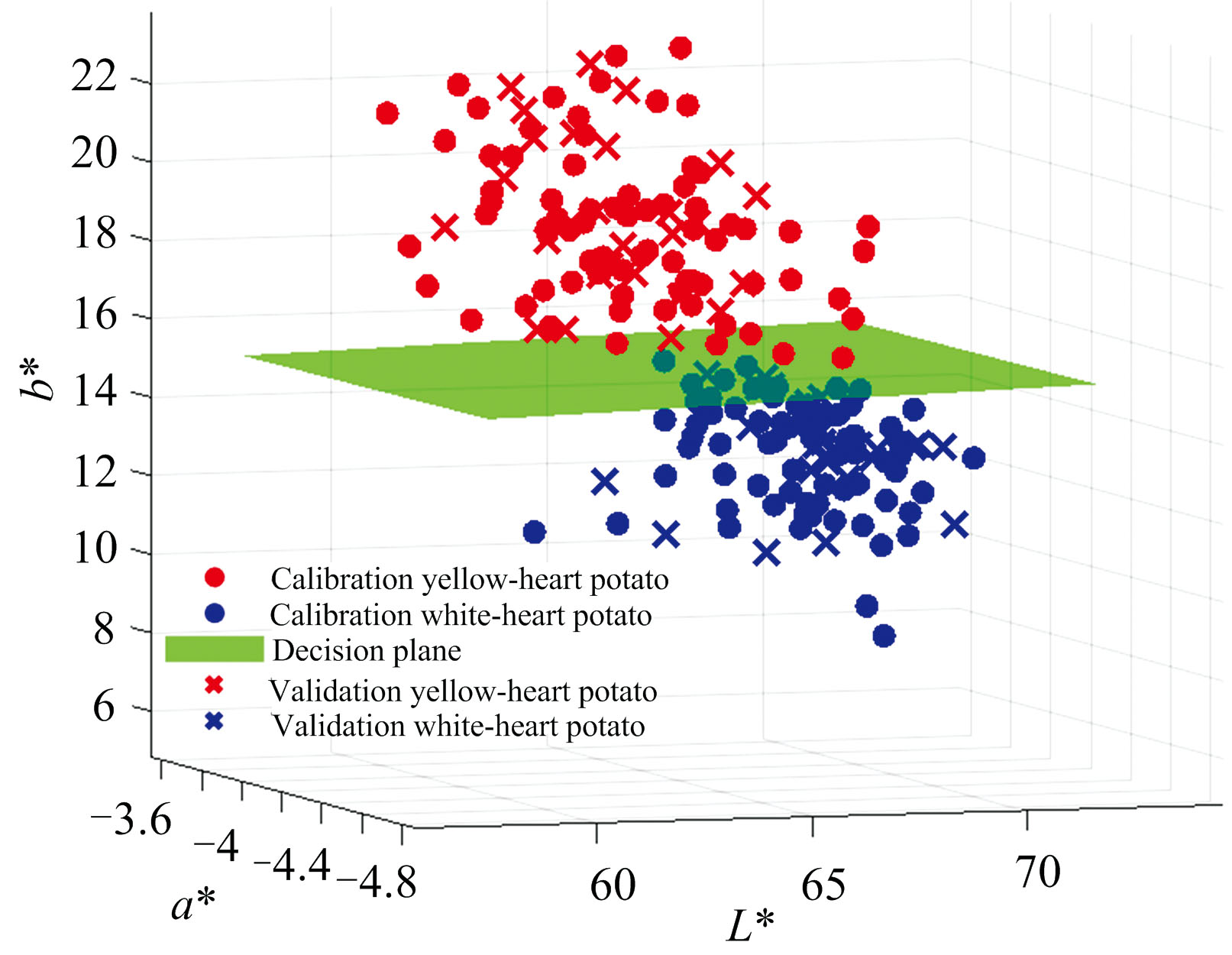 | 图3 黄白芯马铃薯SVM分析结果图Fig.3 SVM analysis results for yellow-and white-heart potatoes |
2.2.1 基于连续光谱的马铃薯L* 、 a* 、 b* 值预测模型
基于便携式连续光谱装置采集209个马铃薯样本连续光谱, 其中包括13种黄芯马铃薯的样本107个和13种白芯马铃薯样本102个。 原始光谱与预处理后光谱如图4所示。
 | 图4 马铃薯连续光谱图 (a): 原始光谱; (b): SNV预处理光谱; (c)MSC预处理光谱Fig.4 Continuous spectrum of potatoes (a): Raw spectrum; (b): SNV preprocessed spectrum; (c): MSC preprocessed spectrum |
采用KS算法将样本按3:1的比例划分为校正集和验证集, 分别建立马铃薯内部颜色参数L* 、 a* 、 b* 值预测模型, 结果如表3所示。 标准正态变量变换(SNV)预处理的预测模型相较于多元散射校正(MSC)预处理方法表现出更优的效果, 其中SNV预处理有效消除固体颗粒大小、 表面散射及光程变化对光谱的影响, 减小了不同马铃薯品种外表皮粗糙度和不同品种马铃薯大小等差异带来的干扰, 从而有效降低了光谱误差, 提升了模型的精度。
| 表3 基于连续光谱的L* 、 a* 、 b* 值建模结果 Table 3 Modeling results of L* , a* , b* based on continuous spectrum |
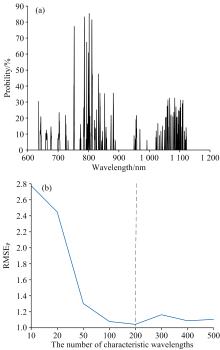
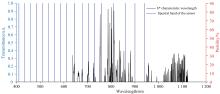
连续光谱波长点数量较多, 全光谱数据中存在与颜色无关的变量, 直接进行建模可能会对模型产生干扰。 因此采用随机蛙跳(RF)算法, 进一步从表现较好的PLS模型中提取相关性较高的波长组合, 并剔除无信息的变量, 由于b* 值与马铃薯内部颜色相关度最高, 针对b* 值得到的各波长点选择概率图如图5(a)所示。 按选取概率对原始1 024个波长点进行排序, 根据选取的波长数量与均方根误差的关系, 选取前200个概率较高波长点作为最终的特征波长, 如图5(b)所示。
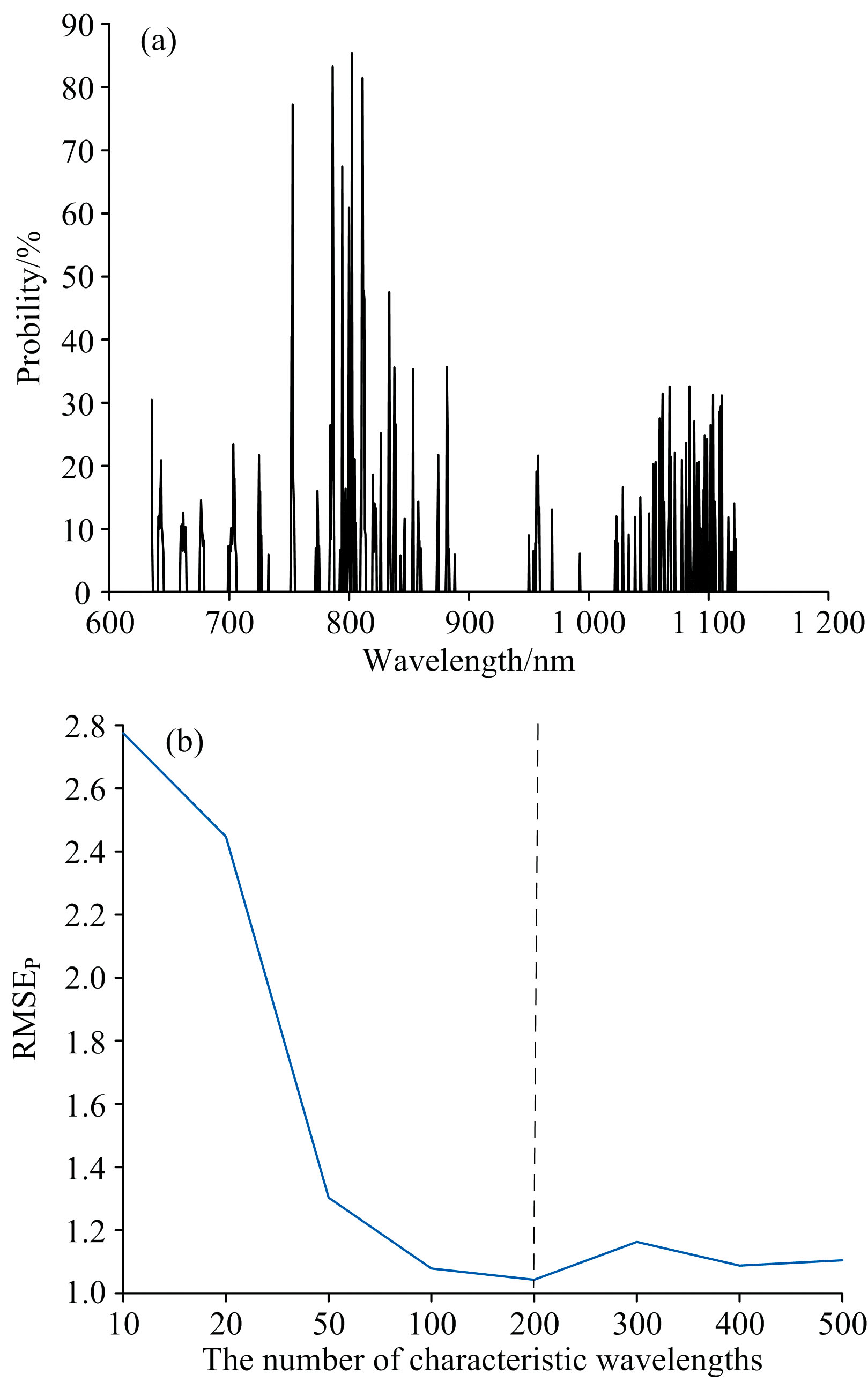 | 图5 特征波长筛选结果图 (a): 波长点被选概率; (b): RMSE随波长数量变化结果Fig.5 Feature wavelength screening results graph (a): Wavelength point selection probability; (b): RMSE variation with the number of wavelengths |
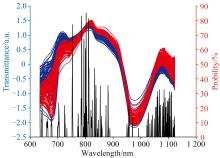
选取的200个特征波长与黄白芯马铃薯样本SNV预处理光谱对比如图6所示, 筛选概率高的马铃薯内部颜色相关特征波长主要集中在750~850 nm之间, 该波长范围涉及到C— H的第四泛音以及C— H的第三泛音的相关贡献[14, 15]。 这主要是因为马铃薯内部颜色与类胡萝卜素含量相关, 而类胡萝卜素含量与 C-H 键的第三泛音和第四泛音密切相关, 因此光谱的这些特征可以间接反映马铃薯内部颜色。 此外, 虽然可见光区域(如650~750 nm)光谱信息也包含与马铃薯内部颜色相关特征, 但其在对马铃薯内部颜色进行判定时被选择概率远低于750~850 nm波长。 这是由于可见光区域的光谱反射率受到马铃薯表面特性(如纹理、 形状等)的干扰较大, 同时可见光在穿透马铃薯时, 受到散射和吸收的影响较大, 难以获取准确的内部颜色信息。 而近红外区域的光谱信息主要与内部色素物质含量相关, 因此750~850 nm波段范围内的光谱特征在区分马铃薯内部颜色时具有更高的灵敏度和特异性。
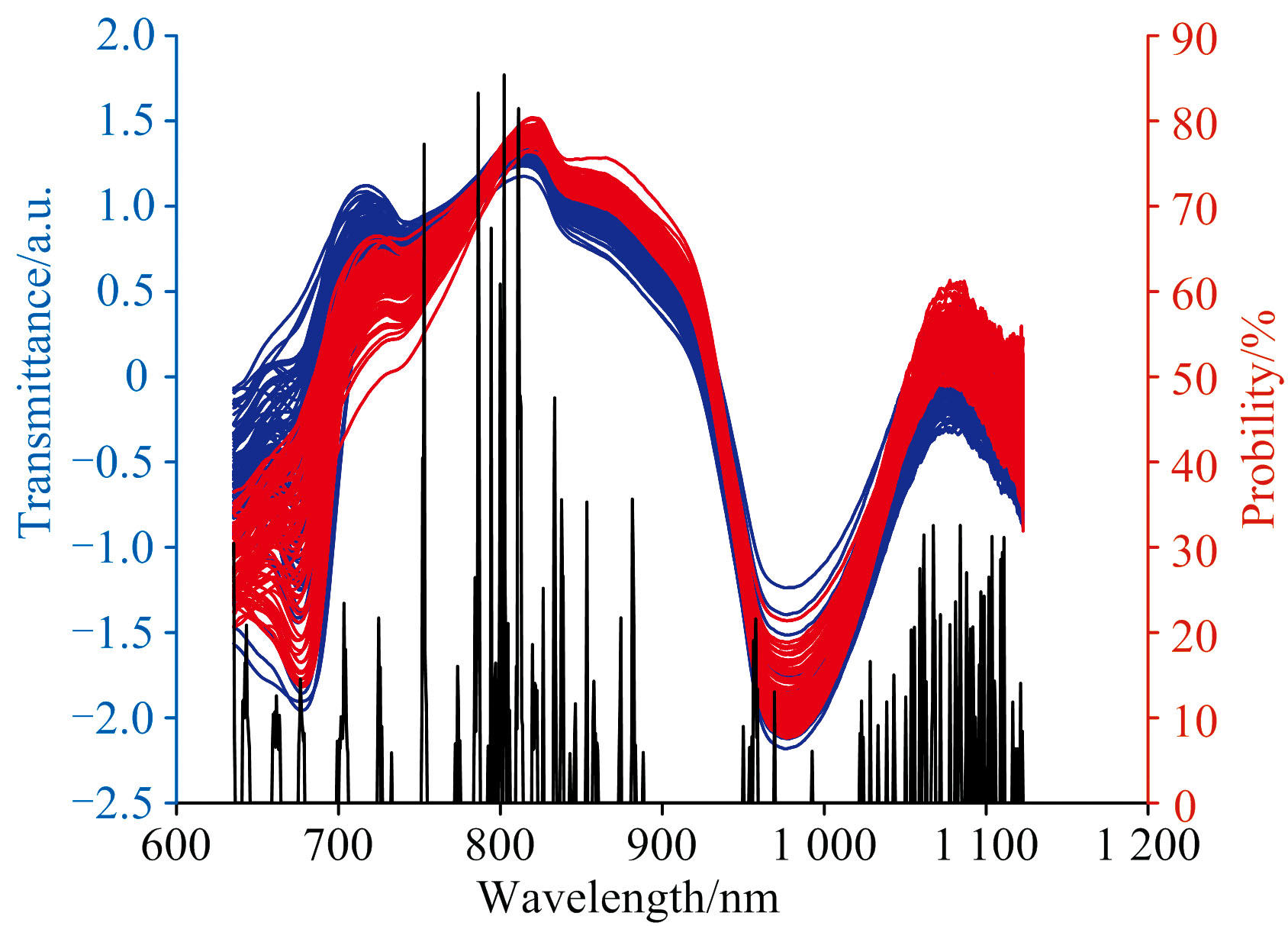 | 图6 黄白芯马铃薯SNV光谱及特征波长对比图Fig.6 Comparison of SNV spectra and characteristic wavelengths for yellow and white-heart potatoes |
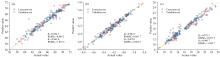
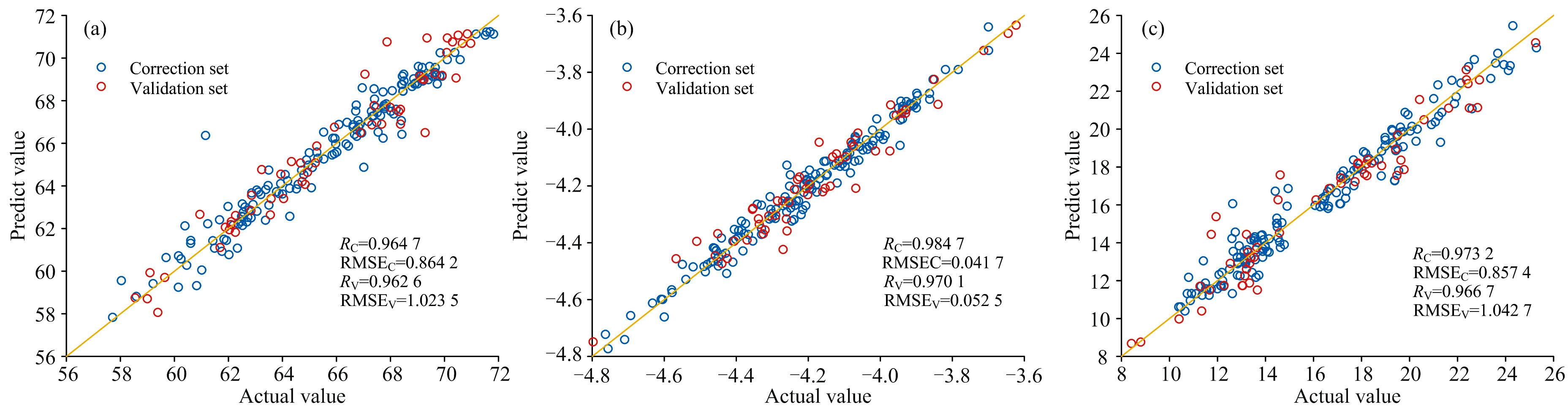
209个马铃薯样本原始光谱经SNV预处理再用RF算法筛选200个相关波长点, 建立了马铃薯内部颜色参数L* 、 a* 、 b* 值的PLSR预测模型, 如图7所示。 通过波长筛选后建立的L* 、 a* 、 b* 值预测模型验证集相关系数分别提升到0.962 6、 0.970 1、 0.966 7, 而验证集均方根误差分别下降到1.023 5、 0.052 5、 1.042 7。
 | 图7 特征波长与L* 、 a* 、 b* 值建模结果散点图 (a): L* ; (b): a* ; (c): b* Fig.7 Scatter plot of characteristic wavelength and L* , a* , b* modeling results (a): L* ; (b): a* ; (c): b* |
2.2.2 基于离散光谱的马铃薯内部颜色参数预测模型
在上述研究中, 基于b* 筛选了200个特征波长, 用于分析马铃薯内部颜色的光谱特性。 这些特征波长的分布与离散光谱传感器的18个波长点具有较高的重合度。 如图8所示, 可以看出在645、 680、 705、 730、 760、 810和860 nm附近, 特征波长分布较为密集。 这表明我们的特征波长选择与离散光谱传感器的波长点具有较高的重合度, 从而证明了离散光谱传感器在马铃薯内部颜色检测中的可行性。
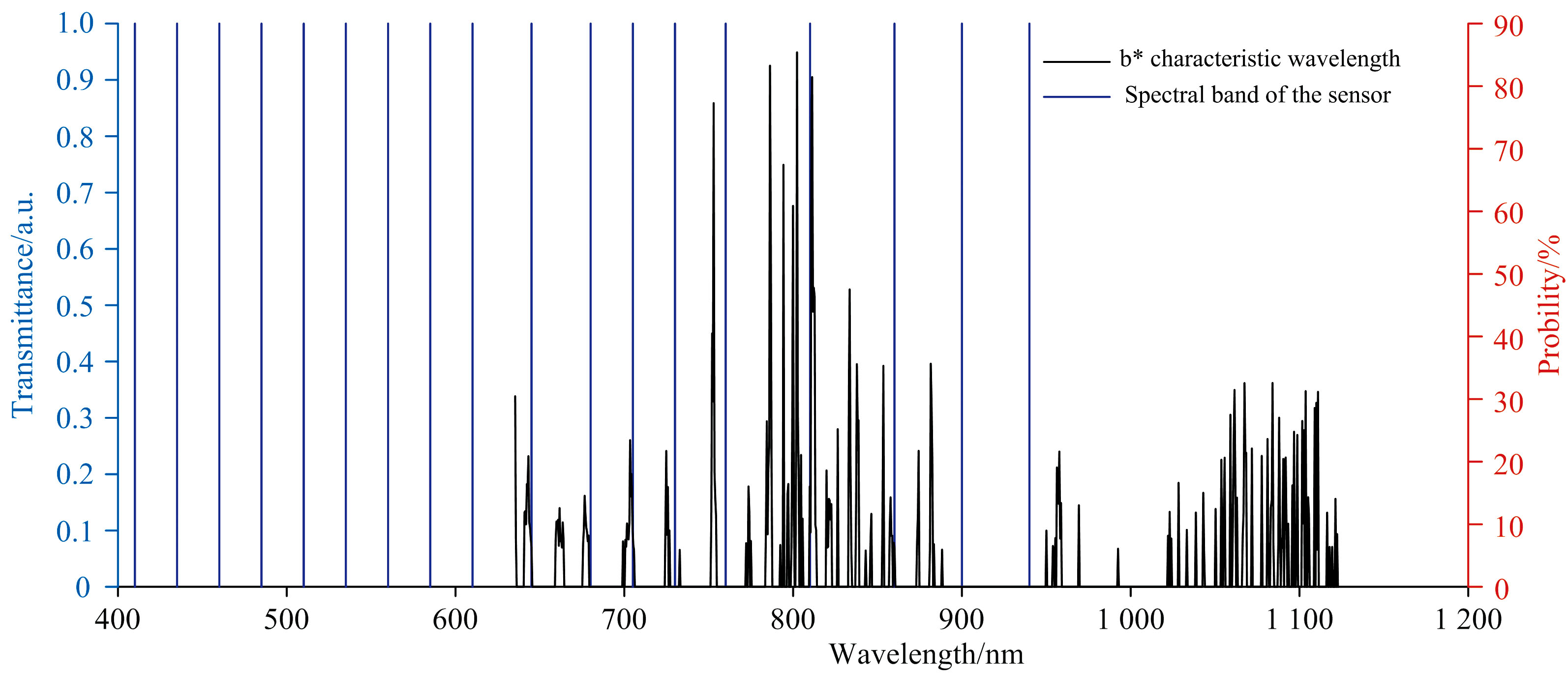 | 图8 离散光谱传感器波段与特征波长对比图Fig.8 Comparison of discrete spectral sensor bands and characteristic wavelengths |
采用掌上式离散光谱装置采集了共209马铃薯样本的离散光谱, 预处理方法采用SNV与MSC, 其中原始光谱与预处理后光谱如图9所示。
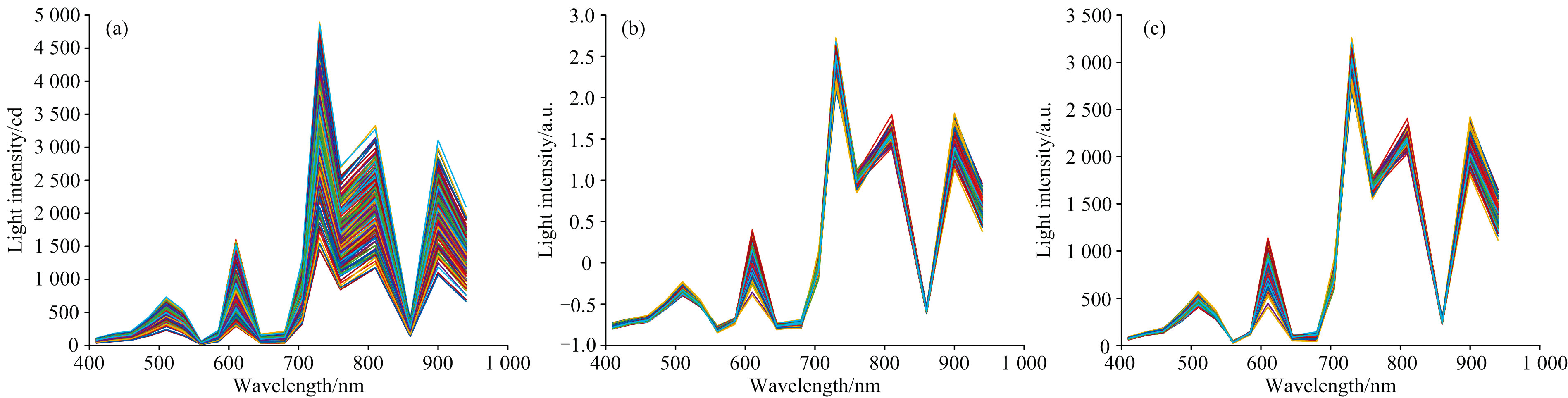 | 图9 马铃薯离散光谱图 (a): 原始光谱; (b): SNV预处理光谱; (c): MSC预处理光谱Fig.9 Discrete spectrum of potatoes (a): Raw spectrum; (b): SNV preprocessed spectrum; (c): MSC preprocessed spectrum |
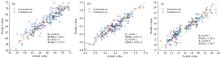
基于离散光谱建立的马铃薯内部颜色参数L* 、 a* 、 b* 值PLSR预测模型如表4所示, 离散光谱预处理后模型预测效果均有一定程度提升, 其中SNV预处理后的模型预测效果最佳, 如图10所示。 L* 、 a* 、 b* 值最佳预测模型验证集相关系数分别为0.921 0、 0.934 2、 0.938 9, 验证集均方根误差分别为1.278 8、 0.081 6、 1.407 1。 结果表明离散光谱传感器能够有效预测马铃薯内部颜色参数。
| 表4 基于离散光谱的L* 、 a* 、 b* 值建模结果 Table 4 Modeling results of L* , a* , b* based on discrete spectrum |
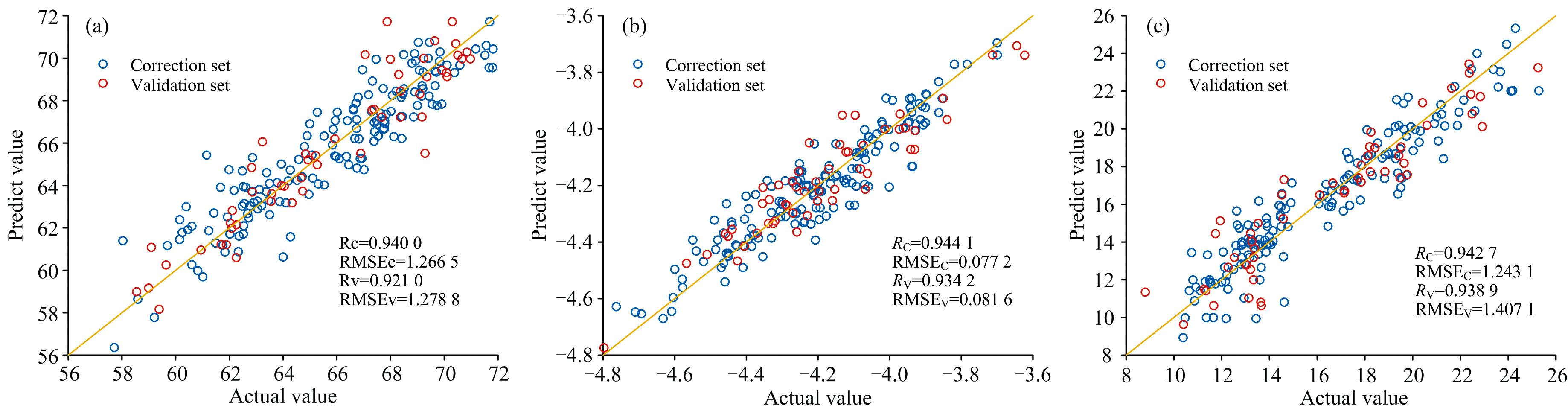 | 图10 离散光谱与L* 、 a* 、 b* 值建模结果散点图 (a): L* ; (b): a* ; (c): b* Fig.10 Scatter plot of discrete spectrum and L* , a* , b* modeling results (a): L* ; (b): a* ; (c): b* |
综上所述, 离散光谱传感器的成本约为微型光谱仪的1/20, 大大降低检测装置成本, 而且基于离散光谱传感器研发的掌上式装置对淀粉、 干物质以及内部颜色参数L* 、 a* 、 b* 值的预测精度满足马铃薯种植、 加工、 销售等产业链的现场检测需求, 更有利于规模化推广应用。
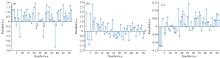
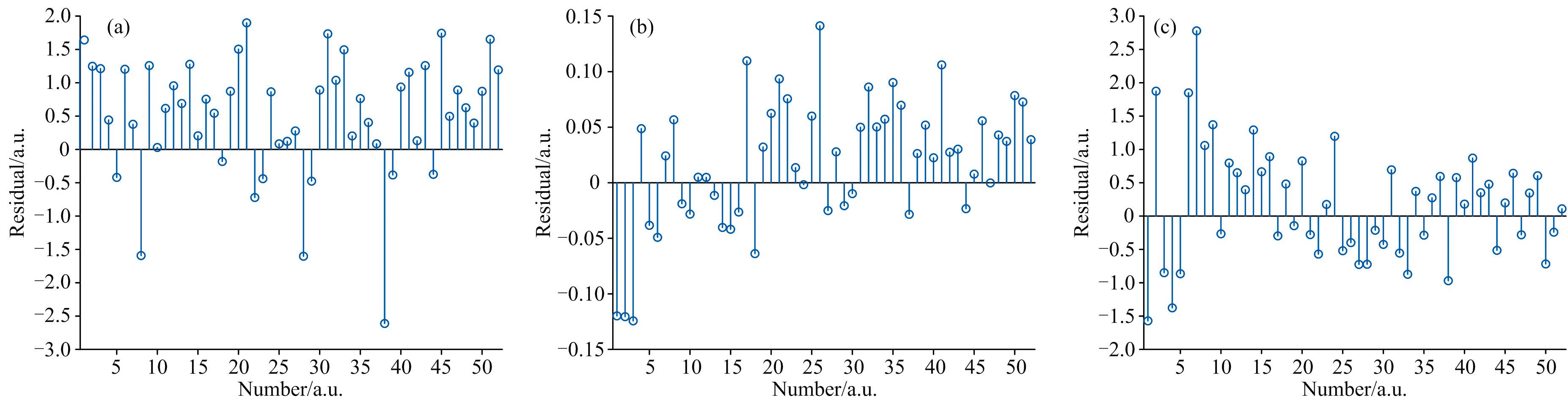
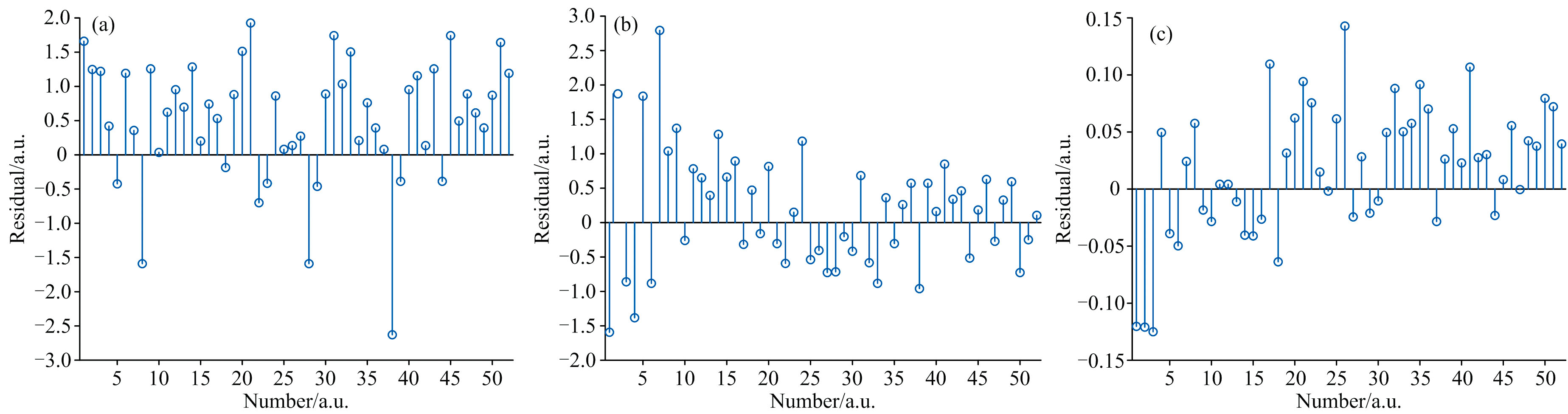
基于209个马铃薯样品建立的马铃薯内部颜色参数L* 、 a* 、 b* 值预测模型分别植入到装置中, 选取26个品种共52个未参与建模的马铃薯样本进行了L* 、 a* 、 b* 值预测外部验证。 基于便携式连续光谱装置的L* 、 a* 、 b* 预测值与标准值最大残差绝对值分别为2.617 3、 0.141 3、 2.779 1, 残差平均值分别为0.857 7、 0.049 0、 0.697 2, 如图11所示。 基于掌上式离散光谱装置的L* 、 a* 、 b* 预测值与标准值最大残差绝对值分别为3.262 8、 0.203 4以及3.519 5, 残差平均值分别为1.093 0、 0.066 7以及1.268 8, 如图12所示。 综上所述, 两种马铃薯多品质无损检测装置均能实现马铃薯内部颜色参数现场实时检测。
 | 图11 便携式连续光谱装置L* 、 a* 、 b* 值外部验证结果残差图 (a): L* ; (b): a* ; (c): b* Fig.11 Residual plot of external verification results of L* , a* , b* values of portable continuous spectroscopy device (a): L* ; (b): a* ; (c): b* |
 | 图12 掌上式离散光谱装置L* 、 a* 、 b* 值外部验证结果残差图Fig.12 Residual plot of external verification results of L* , a* and b* values of handheld discrete spectroscopy |
基于两种无损检测装置对52个马铃薯样本的L* 、 a* 、 b* 预测值, 依据前面209个马铃薯内部颜色标准值所建立的黄白芯马铃薯判别阈值平面, 对52个马铃薯样品进行了黄白芯无损快速判别。 对于新的马铃薯样本, 采集其光谱信息, 通过光谱信息预测马铃薯内部颜色参数L* 、 a* 、 b* 值, 然后代入式(1)进行计算, 当计算结果大于0时, 认定为黄芯马铃薯, 计算结果小于0时, 认定为白芯马铃薯。
结果显示, 基于便携式连续光谱装置的判别正确率为92.31%, 基于掌上式离散光谱装置的判别正确率为86.54%, 如图13所示。 证明基于连续光谱可以很好地完成黄白芯马铃薯的判别, 离散光谱相对连续光谱效果虽有所差距, 但是基本可以满足判别需求。
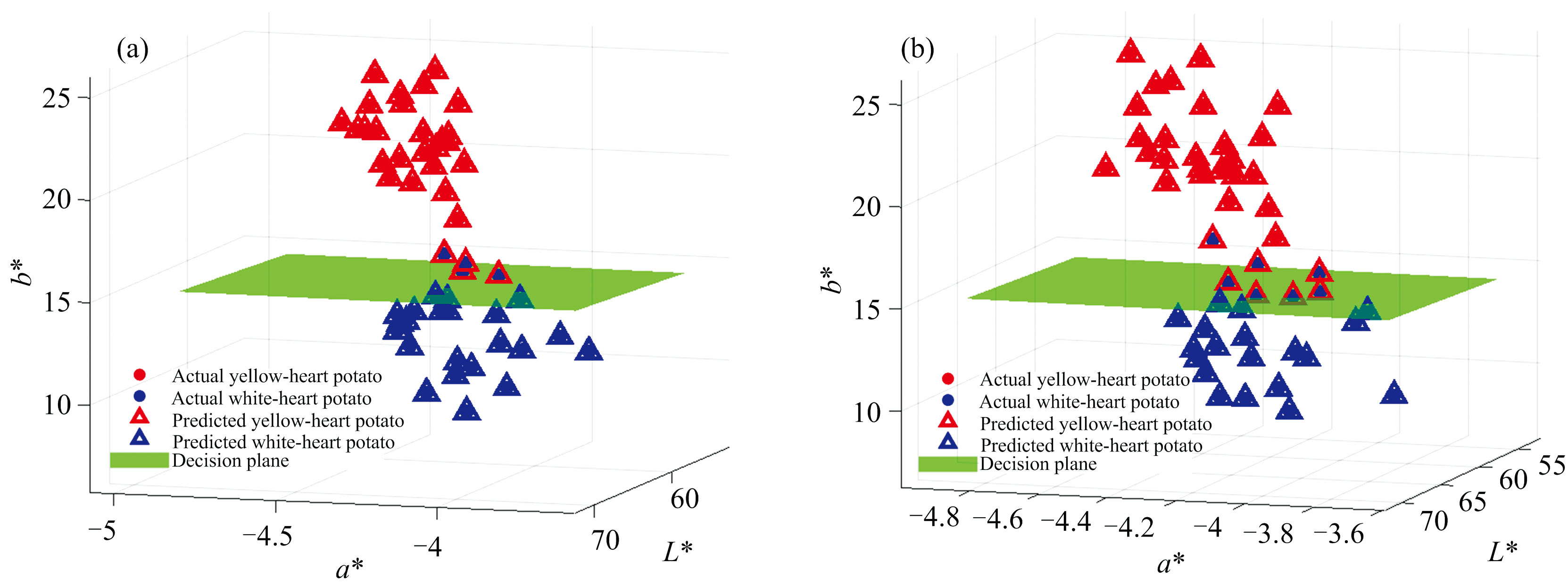 | 图13 基于不同装置的黄白芯马铃薯判别结果散点图 (a): 便携式连续光谱装置; (b): 掌上式离散光谱装置Fig.13 Scatter plot of discrimination results for yellow- and white-flesh potatoes based on different device (a): Portable continuous spectroscopy device; (b): Handheld discrete spectroscopy device |
以马铃薯内部颜色的快速无损数字化表征为目的, 针对马铃薯种植、 加工、 销售等产业链对马铃薯内部颜色实时检测实际需求, 利用作者团队自行创制的基于连续光谱的便携式装置和基于离散光谱的掌上装置, 开展了马铃薯内部颜色参数L* 、 a* 、 b* 值数字化无损检测及黄白芯薯的无损快速判别研究。 主要结论如下:
(1)选用不同产地26个品种共209个马铃薯样本, 基于色差仪分别测定马铃薯样品内部L* 、 a* 、 b* 标准值, 建立黄白芯薯SVM分类判别模型, 确定了黄白芯马铃薯判别阈值平面, 为下一步无损快速判别黄白芯薯提供了判别依据。
(2)基于便携式连续光谱装置采集的209个马铃薯样品连续光谱, 经SNV预处理再结合随机蛙跳算法(RF)筛选200个特征波长建立了马铃薯L* 、 a* 、 b* 偏最小二乘回归(PLSR)预测模型, 其验证集L* 、 a* 、 b* 均方根误差分别为1.023 5、 0.052 5、 1.042 7; 基于掌上式离散光谱装置采集的209个马铃薯样品离散光谱, 经SNV预处理后建立了马铃薯L* 、 a* 、 b* 的PLSR预测模型, 其验证集L* 、 a* 、 b* 均方根误差分别为1.278 8、 0.081 6、 1.407 1。
(3)建立的马铃薯L* 、 a* 、 b* 预测模型分别植入两个装置中, 选取未参与建模的26个品种共52个样本, 分别对马铃薯内部L* 、 a* 、 b* 值进行了外部验证, 基于便携式连续光谱装置的马铃薯L* 、 a* 、 b* 的最大残差绝对值分别为2.617 3、 0.141 3、 2.779 1, 残差平均值分别为0.857 7、 0.049 0以及0.697 2; 基于掌上式离散光谱装置的马铃薯L* 、 a* 、 b* 最大残差绝对值分别为3.262 8、 0.203 4、 3.519 5, 残差平均值分别为1.093 0、 0.066 7、 1.268 8。
(4)基于两种装置对52个马铃薯样本的L* 、 a* 、 b* 预测值, 根据前面建立的黄白芯马铃薯判别阈值平面, 进行了对52个马铃薯进行了黄白芯无损快速判别, 结果显示, 基于便携式连续光谱装置的判别正确率为92.31%, 基于掌上式离散光谱装置的判别正确率为86.54%。
综上所述, 基于可见/近红外光谱可以实现马铃薯内部颜色参数L* 、 a* 、 b* 值的数字化无损检测及黄白芯薯的快速判别。 该技术具有较高的检测精度和良好的重复性, 能够为马铃薯的品质评估提供一种实时快速无损检测方法, 为该技术在马铃薯种植、 加工、 销售等领域的推广应用提供了有力支持。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|