






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于SMART的光纤光谱望远镜中光纤定位闭环控制算法研究
[杨浩杰1  , 甘兆虚
, 甘兆虚1 , 王安之1 , 王佳斌1 , 隋响1 , 窦智1 , 薛维玺1 , 罗佳顺1 , 严云翔1, 2 , 耿涛1 , 孙伟民1, * ]
, 甘兆虚]
|
|


作者简介: 杨浩杰, 2001年生, 哈尔滨工程大学物理与光电工程学院博士研究生 e-mail: yhj15629563127@hrbeu.edu.cn
基于大天区面积多目标光纤光谱天文望远镜(LAMOST)的焦面板上双旋转定位装置的光纤对准需求, 结合可以实现光纤实时定位的异形微透镜瞄准器(SMART)结构, 提出了一种可以实现光纤闭环定位的控制算法。 在闭环控制过程中, 当光纤与星象发生错位时, 星光会偏离SMART的中心平板, 进入异形微透镜, 然后异形微透镜会将部分星光偏折进对应方向的反馈光纤中。 根据六根反馈光纤收到的光强信号, 计算相对反馈光纤的光强对比度, 得出错位的方位信息, 并发出控制信号反馈给光纤定位单元, 驱动双旋转定位装置动态调整角度, 从而实现高精度对准; 其设计逻辑与双旋转定位装置的光纤对准需求高度契合, 因为双旋转装置依赖两个独立旋转轴(中心轴和偏心轴)实现二维定位, 而闭环控制通过实时反馈信号动态修正双轴角度, 补偿机械误差和环境扰动, 最终满足大规模光纤阵列对高精度、 高效率对准的要求。 首先分析了双旋转定位装置的旋转角度与移动距离的对应关系, 设计了一种双旋转定位装置的两轮多步收敛方法。 分析了在双转轴不同展开情况下, 光纤与星像的对准路径的计算公式。 在第一轮定位中单次步长设为30 μm, 设置对比度阈值为0.9; 第二轮定位中单次步长设为10 μm, 对比度阈值根据标定确定。 光纤从错位到对准需要经过多次的运动, 定位单元每移动一次控制系统都会再次获取探测系统的实时反馈信号, 来判断光纤是否达到了阈值要求。 在实验室搭建了LAMOST的模拟光路, 完成了双转轴长度的标定, 对光纤闭环定位系统的定位精度及定位时间进行了测试。 结果表明, 利用该定位系统可以使任意错位的初始状态光纤在平均27.6 s的校正时间内回到与星像对准的状态, 72.5%的光纤校正精度位于10 μm以内, 97.5%的光纤校正精度位于30 μm以内。
, GAN Zhao-xu
A control algorithm for realizing closed-loop fiber positioning was proposed with the structure of the special-shaped micro-lens aimer (SMART) that can achieve real-time fiber positioning, to fit the requirement of the dual-rotary positioning device on the focal plane of the Large Sky Area Multi-Object Fiber Spectroscopic Telescope (LAMOST). During the closed-loop control process, if the fiber and the star image were misaligned, the starlight would deviate from the center plate of the SMART and enter the special-shaped micro-lens, which would deflect part of the starlight into the corresponding feedback fiber. Based on the light intensity signals received by the six feedback optical fibers, the light intensity contrast relative to the feedback optical fibers is calculated to obtain the azimuth information of the misalignment, and a control signal is sent back to the optical fiber positioning unit to drive the dual-rotation positioning device to adjust the angle, thereby achieving high-precision alignment dynamically. Its design logic closely aligns with the optical fiber alignment requirements of the dual-rotation positioning device, as the device relies on two independent rotation axes (a central axis and an eccentric axis) to achieve two-dimensional positioning. The closed-loop control dynamically corrects the dual-axis angle using real-time feedback signals to compensate for mechanical errors and environmental disturbances, ultimately meeting the requirements of large-scale optical fiber arrays for high-precision, high-efficiency alignment. The correspondence between the rotation angle and the movement distance of the dual-rotary positioning device was analyzed, and a two-round, multi-step convergence method was developed. The calculation formulas for the alignment path between the fiber and the star image under different dual-axis expansion conditions were analyzed. In the first round of positioning, the single-step length was set to 30 μm, and the contrast threshold was set to 0.9; in the second round, the single-step length was set to 10 μm, and the contrast threshold was set according to the calibration. The fiber needs to undergo multiple movements, from misalignment to alignment. After each movement of the positioning unit, the control system would again obtain the real-time feedback signal from the detection system to determine whether the fiber had reached the threshold. A simulation system of LAMOST was built in the laboratory, and the lengths of the dual axes were calibrated. The positioning accuracy and positioning time of the fiber closed-loop positioning system were tested. The results showed that the positioning system could make any initially misaligned fiber return to the aligned state. The average correction time was 27.6 s. There were 72.5% fibers of 10 μm correction accuracy, and 97.5% fibers of 30 μm correction accuracy.
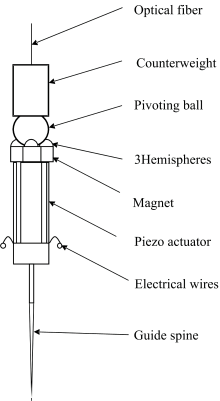
自光纤引入天文观测以来, 天文观测突破了每次只能观测一个天体的限制, 大大提升了光谱获取效率[1, 2]。 在多目标光纤光谱望远镜中, 望远镜的前端光学系统将星光聚焦到望远镜的焦平面上, 焦平面上的光纤再将星光传输至距离较远的光谱仪中。 在该过程中光纤与星光的对准精度决定着光谱获取效率的高低, 是天文观测中至关重要的一环。 早期的多目标望远镜中采用的光纤定位技术主要有插板式和磁扣式两种[3, 4]。 使用这两种光纤定位技术获得了数以百万计的光谱, 不过这两种方法都不适合数量多、 密度大的光纤的定位。 因此后来出现了并行控制的光纤定位器, 如双转轴式、 倾斜脊柱式及星虫式[5, 6, 7, 8]。 双转轴式光纤定位器拥有中心轴与偏心轴两个可旋转的轴, 偏心轴的一端与中心轴的端点连接。 光纤放置在偏心轴的另外一端, 通过双转轴的旋转光纤可到达双转轴所覆盖的圆的任意一点。 在倾斜脊柱式光纤定位器中, 光纤依附在一“ 脊柱” 上, “ 脊柱” 下方的机械装置可以使“ 脊柱” 往任意一个方向上倾斜, 从而实现光纤的定位(如图1)。 星虫式光纤定位器可以吸附于位于焦平面上的透明玻璃板上, 光纤位于星虫的中央, 与星虫连接的控制单元可以使星虫在焦面板上移动从而实现光纤的定位(如图2)。
 | 图1 倾斜脊柱式光纤定位器结构示意图Fig.1 Schematic diagram of the structure of the tilted spine fiber optic positioner |
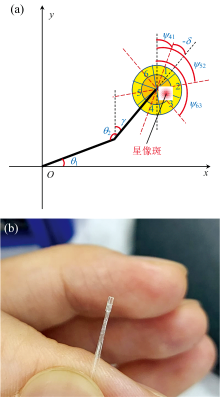
 | 图2 星虫式定位器示意图 (a): 星虫单元; (b): 星虫步进运动方式Fig.2 Schematic diagram of the Starworm locator (a): Starworm unit; (b): Starworm stepping motion |
双转轴式光纤定位器首次被大天区面积多目标光纤光谱望远镜(large sky area multi-object fiber spectroscopic telescope, LAMOST)提出并应用, 实现了4000根光纤的并行控制定位[9]。 为了实现更高精度的光纤定位, 目前运行的多目标望远镜开展了闭环式的光纤定位系统的研究[10, 11, 12]。 将光纤从光谱仪端点亮或者在光纤的前端打光将其照亮, 然后利用摄影测量系统拍摄并提取光纤位置, 然后与星象在焦平面上的位置进行对比, 若未达到需要的精度则控制光纤往星象位置处移动, 若已满足定位精度则定位结束。 不过这种光纤的闭环定位需要在停止天体观测时进行, 无法在观测时进行实时定位。 哈尔滨工程大学的杨菁等人提出了一种可以进行实时定位的五芯光纤束, 中间的纤芯用来传输目标天体的星光, 周围的四根纤芯用来检测光纤与星象的对准情况, 不过这种五芯光纤束结构的光纤瞄准器存在一定的检测盲区[13]。 本课题组提出了一种用于光纤实时定位的无检测盲区的异形微透镜瞄准器(special-shaped micro-lens aimer for real-time targeting, SMART)[14], SMART由中间的中心平板及周围的六个扇环形微透镜组成, 目标星象传输光纤位于中心平板后, 六根反馈光纤对应周围的六个扇环形微透镜。 当光纤与星象发生错位时, 周围的反馈光纤就可以得到光信号。 本文根据SMART的对准原理提出了一种可以将错位光纤与星象快速对准的闭环控制算法, 并在实验室搭建了闭环控制系统进行了测试。
图3是安装在双旋转结构上的SMART结构。 其中, 中心轴的圆心位于XOY坐标系的坐标原点O, 与x轴夹角为θ 1(0< θ 1< 2π ); 偏心轴与中心轴夹角为θ 2(0< θ 2< π ), 与竖直正方向夹角为γ (从竖直正方向转向偏心轴, 顺时针为正, -π < γ < π ), SMART中心位于偏心轴的端点处。 六个微透镜分为三组, 将偏心轴延长线所经过的微透镜定义为1号微透镜, 并将其余5个微透镜沿顺时针方向依次编号为2— 6号, 微透镜后的反馈光纤编号与其前方微透镜相同。 三对微透镜的对称轴(图3中红色虚线)分别为直线41(从微透镜4指向微透镜1)、 直线52(从微透镜5指向微透镜2)和直线63(从微透镜6指向微透镜3)。 其中直线41与偏心轴夹角为δ (从偏心轴转向直线41, 顺时针为正, -π /6< δ < π /6)。 直线41、 52和63与竖直方向的夹角分别为Ψ 41、 Ψ 52和Ψ 63。
 | 图3 双旋转轴及SMART结构示意图及实物图 (a): SMART结构示意图; (b): SMART实物图Fig.3 Schematic diagram of the dual-rotary axes and the structure of SMART (a): SMART structure diagram; (b): SMART physical image |
SMART的中心为圆形平板, 其半径设置满足科学光纤和LAMOST入射焦比F/5的要求, 若星像斑落在LAMOST科学光纤320 μ m芯径的纤芯中, 则在SMART前端一定落在圆形平板之内。 周围每个扇环形微透镜后都有一根反馈光纤, 若星像偏离科学光纤纤芯, 则在SMART前端会偏出圆形平板, 入射到扇形微透镜上, 并部分进入反馈光纤。
当反馈光纤接收到星光信号后, 就会给出星像斑与科学光纤纤芯错位的反馈信息, 控制系统会对双旋转轴发出旋转信号。 控制系统根据反馈光纤光强对比度信息、 双旋转轴当前角度(θ 1和θ 2)、 SMART当前位置(δ )给出反馈控制信号。
理论上, 当星像斑正好经过SMART的中心平板落在科学光纤纤芯中, 所有光能均进入科学光纤, 反馈光纤的强度均为零。 但实际上, 由于星斑弥散、 SMART内部散射以及杂散光因素等, 即使星光与光纤纤芯对准, 各个反馈光纤也会收到微弱的光信号, 一对反馈光纤的光强对比度是处于一定的范围, 本文称之为阈值范围(Vth)。 为了获得每一对微透镜对应科学光纤光强最大值时反馈光纤光强对比度, 实验中使偏心轴分别展开为60° 和120° , 中心轴每旋转30° 记录一次科学光纤光强最大时反馈光纤的光强数据, 求得三对反馈光纤的光强对比度。 考虑到在进行天体观测时不同天体的亮度不同, 因此不能直接用反馈光纤光强作为星光与光纤纤芯是否对准的评判标准。 我们采用了位置相对的一对反馈光纤的光强对比度作为光纤是否对准的评判方法。 若反馈光纤光强对比度达到提前设定好的对比度阈值Vth, 则说明对准已完成。 对应三对微透镜的对比度为
式中, I1至I6代表6根反馈光纤接收到的光强。
为实现既快速又精准的对准, 整个校正过程按两轮多步进行的方式进行(如图4)。 第一轮为粗调, 光纤每次移动的距离为30 μ m; 第二轮为细调, 光纤每次移动的距离为10 μ m。 每一轮又可以分为3个方向, 依次根据1— 4、 2— 5和3— 6三对反馈光纤的光强对比度, 驱动光纤分别在直线41、 直线52、 直线63三个方向上移动, 次序为先沿直线41方向, 再沿直线52方向, 最后沿直线63方向。 在每个方向上, 首先判断光强对比度是否满足阈值。 如果满足阈值要求, 则进入下一方向或下一轮; 如果不满足阈值要求, 就沿该方向进行移动, 直到满足阈值条件。
 | 图4 光纤位置校正流程图Fig.4 Flowchart of the fiber position correction |
假设星象与SMART的相对位置如图3所示, 图中红色圆斑表示星像斑。 此时反馈光纤2、 3收到星光信号, 反馈光纤1、 4、 5、 6中只有本底噪声信号。 在第一轮的校正过程中, 根据反馈光纤的信号可以判断出反馈光纤1、 4的光强对比度已进入阈值范围(实验中, 本底噪声信号较为均匀, 对应光强对比度很小), 无需进行校正, 直接进入到第二步光纤在直线52方向上的校正。 要校正光纤在直线52方向上的错位, 就需要首先求出直线52的方程。 该直线方程的斜率k52为
式(4)中, δ 由SMART和偏心轴的相对位置确定, 可通过标定得出, γ 的值根据图5中双旋转轴的各种展开情况, 可以得出
 | 图5 双转轴各种展开情况下的γ 求解示意图 (a), (b), (c): 0° < θ 1< 90° ; (d), (e), (f): 90° < θ 1< 180° ; (g), (h), (i): 180° < θ 1< 270° ; (j), (k), (l): 270° < θ 1< 360° Fig.5 Diagram for solving γ in various expansion situations of the dual-rotary axes (a), (b), (c): 0° < θ 1< 90° ; (d), (e), (f): 90° < θ 1< 180° ; (g), (h), (i): 180° < θ 1< 270° ; (j), (k), (l): 270° < θ 1< 360° |
在求出直线52的斜率后, 将SMART中心坐标代入, 即可求得直线52的方程。 该图中反馈光纤2收到星光信号, 所以I2是大于I5, 即求得对比度V52会大于2— 5这对反馈光纤的阈值范围, 根据对比度V52的值选择所要移动的方向为指向微透镜5的方向, 然后按该方向以步长30 μ m计算SMART中心的新坐标, 并计算对应的中心轴和偏心轴新的角度θ '1和θ '2。 然后将两轴角度差值Δ θ 1=θ 1-θ '1和Δ θ 2=θ 2-θ '2通过控制系统发送信号给光纤定位单元。 光纤每次移动之后, 反馈光纤的光强就会发生变化, 将变化后的对角光强对比度与设定的阈值范围再次进行对比, 若未进入阈值范围则继续校正过程, 若已进入阈值范围则该步校正过程结束。 然后, 根据移动后反馈光纤3、 6的光强对比度重复以上步骤, 完成第一轮校正。 完成第一轮校正后, 再依次按照41、 52、 63方向的次序, 以步长10 μ m进行第二轮校正。 与式(4)得到的直线52的斜率类似, 直线41与直线63的斜率为
如图6所示, 搭建了LAMOST的星象传输模拟光路。 白光LED光源发出的光由一个倍数为40倍、 数值孔径为0.4的显微物镜扩束后, 经过一直径200 μ m的小孔。 此孔用来模拟因大气湍流、 衍射及像差等而被放大的星像[9]。 经过焦距为75 mm透镜1准直的平行光束, 经过直径为30 mm的圆形光阑照射到焦距为150 mm的透镜2, 以模拟LAMOST中F/5的入射焦比。 为了保证以上光学系统中准直光束的平行度, 首先将氦氖激光器放置于显微物镜前, 并将剪切干涉仪放置于透镜1后检测了光路的平行度, 然后利用白光LED光源替换了氦氖激光器。 为观察校正过程中SMART与光斑的对准情况并测量双转轴两轴长度, 在透镜2与SMART之间放置一分束立方体, 利用CCD观察SMART前表面。 为测量双转轴两轴长度, 需实现对覆盖SMART运动范围的较大物面进行成像, 因此在CCD前方放置了放大倍数为0.5倍的物方远心镜头。
 | 图6 闭环控制系统示意图Fig.6 Schematic diagram of the closed-loop control system |
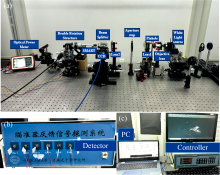
接下来将SMART固定在双转轴定位机构上, 并将它们整体固定于一个位移台上。 调节位移台使微透镜前表面位于光束焦点附近。 采用光功率计对科学光纤的光强进行测量, 调整定位机构下方的位移台的角度及位置, 当科学光纤的光强最大时, 认为微透镜前表面的中心平面与光束垂直。 然后将6根反馈光纤连接到反馈信号探测系统的6个通道中, 每个通道内部都有一个滨松公司生产的型号为CH253的电压输出型光电倍增管。 控制系统采用了由卓立汉光生产的型号为SC300-A的步进电机控制箱, 在闭环定位开始前, 将控制箱中的驱动器调整为64细分, 并调整驱动器的输出电流与双转轴中两个电机的工作电流相匹配, 如图7所示。
 | 图7 闭环控制系统实物图 (a): 星象传输模拟光路; (b): 反馈信号探测系统; (c): 控制系统Fig.7 Physical diagram of the closed-loop control system (a): Star transmission analog optical path; (b): Feedback signal detection system; (c): Control system |
由于双转轴的制作精度有限, 因此在实验开始之前首先要对双转轴的两转轴的长度进行测量。 利用带尾纤的半导体激光器将激光耦合入科学光纤, 利用CCD拍摄SMART图像, 得到SMART中心坐标。 首先固定中心轴, 旋转偏心轴, 将SMART中心轨迹拟合为一个圆[如图8(a)], 得到偏心轴的长度和转轴中心。 然后, 将偏心轴角度转为0° , 使两轴重合, 旋转中心轴, 再将SMART中心轨迹拟合为一个圆, 最终得到两轴的长度差值和转轴中心[如图8(b)]。 经过对图8中两个光斑轨迹的拟合, 最终得出中心轴与偏心轴长度分别为8 148和7 926 μ m。
 | 图8 SMART前表面中心的光斑轨迹 (a): 偏心轴旋转; (b): 中心轴旋转Fig.8 The light spot trajectory at the center of the front surface of SMART (a): Eccentric shaft rotation; (b): Central shaft rotation |
在进行接下来的标定及测试前, 需先将探测系统的6个探测通道与前方6个扇环形微透镜进行一一对应然后对其编号。 首先将双转轴两轴展开角度都调为0° , 将此时x轴负方向所指向的微透镜定义为1号微透镜, 顺时针将透镜依次编号为1到6号。 点亮光源, 边移动双转轴下方位移台边观察反馈光纤光强, 将6个探测通道与前方微透镜进行一一对应。
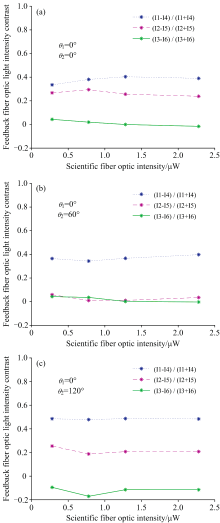
在确定光强对比度阈值之前, 对SMART在不同入射光强时反馈光纤光强对比度的稳定性做了测试。 如图9所示, 以科学光纤收到的光强为标准, 测试了光强分别为0.28、 0.78、 1.28和2.28 μ W时, 在科学光纤光强最大的条件下, 三对光强对比度的变化。 实验中选取了偏心轴展开角度分别为0° 、 60° 、 120° 时的三个位置进行了测试, 结果显示在不同位置的不同入射光强下, 反馈光纤光强对比度是比较稳定的, 9条折线的标准差最大仅为0.004~0.033。
 | 图9 反馈光纤光强对比度随入射光强的变化 (a): 偏心轴展开角度为0° ; (b): 偏心轴展开角度为60° ; (c): 偏心轴展开角度为120° Fig.9 Variation of the light intensity contrast of the feedback fiber with the incident light intensity (a): The expansion angle of the eccentric axe is 0° ; (b): The expansion angle of the eccentric axe is 60° ; (c): The expansion angle of the eccentric axe is 120° |
按照第1节中阈值范围Vth测量方法测量共获得数据24组, 如图10所示。 3组反馈光纤的光强对比度的均值及标准方差分别为14光纤: 0.34± 0.17, 25光纤: 0.25± 0.18和36光纤: 0.20± 0.23, 即3组反馈光纤的阈值范围分别为: 14光纤: 0.17~0.51, 25光纤: 0.07~0.43和36光纤: -0.03~0.43。
 | 图10 反馈光纤光强对比度阈值标定 (a): 偏心轴展开角度为60° ; (b): 偏心轴展开角度为120° Fig.10 Calibration of the contrast thresholds of the optical intensities of the feedback fibers (a): The expansion angle of the eccentric axe is 60° ; (b): The expansion angle of the eccentric axe is 120° |
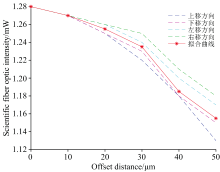
为模拟大气湍流的效果, 我们在图6的测试系统中加入了小孔。 实际上由于衍射、 散射及加工精度多种因素, 在光斑处于科学光纤中心时, 6根反馈光纤对应的光电倍增管都可以收到一定的信号。 为了检验SMART的工作效果, 我们利用科学光纤的输出光强作为光斑对准精度的指标。 首先, 对不同偏离情况下科学光纤的输出光强进行了测试。 将偏心轴展开角度调为0° , 调整位移台使科学光纤能量最大, 并且沿光路传播方向看向SMART, 通过控制双转轴下方的位移台使其在视角下分别在上下左右4个方向移动, 进而使光斑与光纤的相对位置发生错位, 每移动10 μ m记录一次科学光纤的光强。 4个方向上科学光纤光强的变化如图11中四条虚线所示, 取这四组数据的均值绘制出图中的红色曲线, 并以此曲线作为光纤校正精度的参考标准。
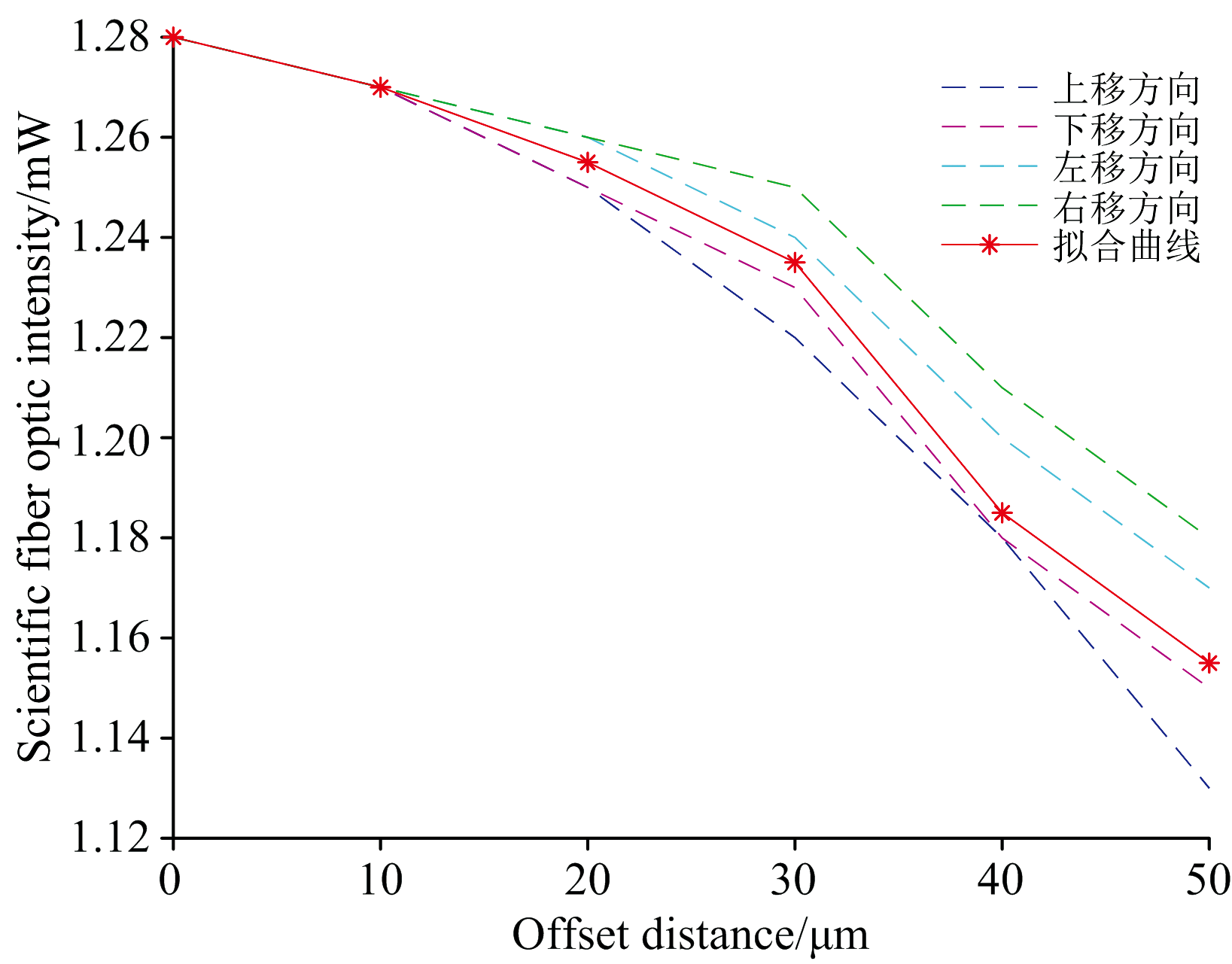 | 图11 科学光纤光强随光斑错位距离的变化Fig.11 The variation of the light intensity of scientific optical fibers with the distance of spot misalignment |
为测试光纤位置校正算法的正确性, 在双转轴的整个覆盖范围内选取了一些位置, 使光斑与光纤发生相对位置的错位, 然后运行光纤位置校正系统, 校正效果与预期相符。
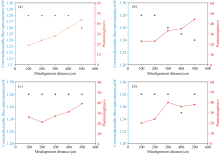
测试过程如下, 首先将光纤运转至任一位置, 然后分别朝着上下左右四个方向移动双转轴下方位移台, 每移动100 μ m 后, 运行光纤位置自动校正程序进行光纤位置的校正。 校正完成后, 检查科学光纤的光强, 依据图11的测试结果, 判断定位精度。 沿四个方向分别移动100、 200、 300、 400和500 μ m, 得到校正后科学光纤光强及所用校正时间如图12所示。
 | 图12 光纤校正后科学光纤光强及校正所需时间 (a): 光纤位置向上错位; (b): 光纤位置向下错位; (c): 光纤位置向左错位; (d): 光纤位置向右错位Fig.12 The intensity of the scientific optical fiber after correction and the required time of correction (a): The position of the optical fiber is displaced upwards; (b): The optical fiber position is misaligned downward; (c): The position of the optical fiber is displacedto the left; (d): The position of the optical fiber is displaced to the right |
通过将校正结束后的科学光纤的光强与图11中科学光纤光强随光斑错位距离的变化进行对比即可得出测试光纤的定位精度, 同时记录该校正过程所需时间。 每次校正结束后通过步进电机控制箱将光纤移动至校正前位置, 然后再将位移台沿同一方向继续移动100 μ m然后重复上述过程, 直到光斑偏出SMART的探测范围。 每一个方向测试结束后, 调整位移台使光斑重新回到科学光纤光强最大时的位置, 然后继续下一个方向的测试。
经过对测试数据简单的统计, 得到SMART在任意方向都可以校正500 μ m内的错位。 虽然校正时间随着错位距离的增大而变长, 但是平均校正时间仅为27.6 s。 对比图11的数据可知, 72.5%的校正精度位于10 μ m以内, 97.5%的校正精度位于30 μ m以内。
基于SMART的光纤位置检测原理提出了光纤闭环定位算法。 然后在实验室中搭建了LAMOST的星象传输模拟光路与光纤定位闭环控制系统, 闭环控制系统包含与SMART适配的双转轴式光纤定位单元, 用于接收SMART的六根反馈光纤信号的探测系统以及定位单元控制系统。 对双转轴光纤定位单元相关参数, 以及测试过程中的一些标准进行了标定, 根据标定结果完成了光纤闭环定位的测试。 测试结果表明无论双转轴处在什么样的展开情况下, 该定位系统都可以快速校正光纤在500 μ m内的任意方向的错位, 平均校正时间为27.6 s, 72.5%的校正精度位于10 μ m以内, 97.5%的校正精度位于30 μ m以内。 SMART由于周围为6个扇环形微透镜, 在每个扇形微透镜后方有一根反馈光纤。 扇形微透镜可以使偏出中心平板的星光进入其后方的反馈光纤, 且不存在检测盲区, 即无论光纤沿任何方向偏移, 微透镜后的反馈光纤总能收到反馈信号。 在观测过程中, 光纤与星光对准偏差较大则会导致收到环形斑, 如图13所示, 这种数据则会导致光谱的测量精度和信噪比较差。 SMART与现有的光纤定位技术的比较如表1所示。 SMART达到了目前行业内光纤定位精度水平的同时唯一实现在线使用, 通过闭环控制可一边观测一边获取对准情况然后控制光纤校正对准, 且平均校正时间优于目前现有技术。 而由于实验中使用的SMART尺寸较大, 且双转轴并不是LAMOST实际采用的双转轴, 实验效果还没有达到最佳。 目前我们正在设计并制作尺寸更小的SMART, 以期可以尽快安装到LAMOST焦面板上。
 | 图13 对准问题导致光纤出射端能量分布不同Fig.13 The misalignment of the problem causes different energy distributions at the output end of the optical fiber |
| 表1 SMART与现有技术定位精度对比 Table 1 Comparison of positioning accuracy between SMART and existing technologies |
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|