












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
优化稀疏表示的迷彩伪装目标高光谱识别方法研究
[徐景余1  , 包妮沙
, 包妮沙1, 2, * , 郎洁双3 , 刘善军1, 2 , 毛亚纯1, 2 , 贺黎明1, 2 ]
, 包妮沙, 郎洁双|
|


作者简介: 徐景余, 2000年生, 东北大学资源与土木工程学院硕士研究生 e-mail: 1967824405@qq.com
目前利用稀疏表示算法提取高光谱影像中伪装目标时, 背景字典的选择受到伪装目标“异物同谱”的影响, 导致无法准确检测伪装目标。 为探索解决这一问题, 以草地伪装网、 荒漠伪装网为研究对象, 分别采集伪装网可见光-近红外反射率光谱和机载高光谱影像, 分析室外测得的伪装网、 机载影像中背景像元与伪装目标像元的光谱特征。 利用室外测得的伪装网与机载影像中的背景光谱具有差异性、 相邻像元属于同一地物可能性大的特点, 提出基于欧式距离和影像同质性特征约束的背景字典选择方法, 进一步利用背景字典稀疏表示方法识别目标。 结果表明: (1)对于草地伪装: 在750~1 000 nm波长范围内, 影像中背景像元光谱的反射率高于伪装网光谱的反射率。 对于荒漠伪装: 在550~700 nm范围内, 影像中背景像元光谱反射率高于伪装网光谱的反射率。 (2)通过建立与目标像元光谱欧式距离最大, 且与邻域像元同质性最高的空谱特征约束条件, 选取了草地伪装影像413个背景像元和荒漠伪装影像507个背景像元作为背景字典。 (3)基于改进的背景字典选择方法, 利用稀疏表示算法对伪装目标进行识别, 结果可以精确判别伪装目标的位置与数量。 对草地伪装目标与荒漠伪装目标检测的接受者操作特征的曲线下面积(AUC)分别达到了0.96和0.98, 表明该算法针对草地伪装目标、 荒漠伪装目标均具有良好的检测性能。
Referring to the current use of sparse representation algorithms to extract camouflaged targets from hyperspectral images, the selection of the background dictionary is affected by the “same spectrum of different objects” of the hidden targets, resulting in the inability to detect camouflaged targets accurately. In this paper, we take the grassland camouflage net and desert camouflage net as the research objects, collect the visible-near-infrared reflectance spectra of the camouflage net and airborne hyperspectral images respectively, and analyze the spectral characteristics of the background pixels and camouflage target pixels in the camouflage net and airborne images measured outdoors. Taking advantage of the fact that the spectra of the camouflage nets measured outdoors and the background in the airborne images are different and the possibility of neighboring image elements belonging to the same feature is high, the background dictionary selection method based on the constraints of Euclidean distances and image homogeneity features is proposed, and the sparse representation of the background dictionary is further utilized to identify the target. The results show that (1) in the wavelength range of 750~1 000 nm for grass camouflage, the reflectance of the background pixel spectrum in the image is higher than that of the camouflage net spectrum. For desert camouflage: in the range of 550~700 nm, the reflectance of the background pixel spectrum in the image is higher than that of the camouflage net spectrum. (2) By establishing spatial and spectral feature constraints with the maximum spectral Euclidean distance to the target image element and the highest homogeneity with neighboring image elements, 413 background image elements in the grass camouflage image and 507 background image elements in the desert camouflage image were selected as the background dictionary. (3) Based on the improved background dictionary selection method, the sparse representation algorithm is utilized to identify the camouflage targets, and the results can accurately discriminate the location and number of camouflage targets. The area under the curve (AUC) of the receiver operating characteristics for the detection of grass camouflage targets and desert camouflage targets reaches 0.96 and 0.98, respectively, indicating that the algorithm has good detection performance for both grass camouflage targets and desert camouflage targets.
高光谱遥感在获取地物几何信息的同时, 能够获取地物连续的电磁波谱特性曲线, 是一种“ 图谱合一” 的探测技术[1]。 通过深度挖掘和提取高光谱遥感成像获取的空谱信息, 可以有效地探测和识别各种地物, 相比多光谱遥感很大程度提高了地物识别的类型和准确率[2], 因此被广泛应用于重要目标如飞机、 船舶、 装备等的识别。
伪装目标是指利用迷彩伪装材料使目标与周围环境高度相似或融合形成的地物。 近年来, 随着材料学科的快速发展, 地物伪装材料的伪装性能得到显著提升, 给伪装目标的识别带来新的挑战[3]。 通过高光谱遥感的空谱特性, 可以有效解决伪装材料与背景地物因“ 同谱异物” 现象难以被多光谱影像与传统计算机视觉技术识别的问题。
高光谱目标识别是通过分析利用背景与目标之间的光谱差异信息实现的。 稀疏表示方法通过字典中的基向量重构像元光谱的过程, 更深层次挖掘了目标光谱与背景光谱之间的差异信息, 其原理在1996年由Olshausen首次提出[4], 之后被广泛应用于信号处理[5]、 数据传输[6]及计算机视觉[7]等领域。 2011年, Chen[8]等首次将稀疏表示的方法应用到Desert Radiance Ⅱ 、 Forest Radiance Ⅰ 等高光谱数据对地雷目标、 矿井目标等进行识别, 证明稀疏表示方法检测性能优于二值分类器。 相较于传统的识别方法, 稀疏表示模型无需对地物分布进行统计假设, 有效避免了噪声的影响, 且在对样本字典的构造过程中, 充分利用了目标与背景的空谱信息, 使模型具有良好的识别性能。 由背景样本基向量构成的背景字典是稀疏表示模型的重要组成部分, 其纯净度和包含地物类别的多样性决定目标识别的精度。 因此为了提高复杂背景下目标的识别精度, 针对字典的构造方法国内外展开了大量研究, 陶洋[9]提出将高光谱影像分解成低秩背景和稀疏目标, 引入目标字典作为先验信息构造背景字典, 对AVIRIS1、 AVIRIS2高光谱影像进行飞机目标的识别, 飞机目标检测的AUC值达到了0.98。 Wei[10]提出结合局部与全局光谱信息构建分层背景字典的方法, 对AVIRIS1、 AVIRIS2高光谱影像中的飞机目标检测的AUC值分别达到了0.994与0.975。 上述背景字典的构造方法主要用于单一目标和背景比较纯净的情况, 针对多个目标或者复杂背景, Peng等[11]提出了局部自适应联合稀疏表示, 将训练样本的邻域像元扩展到训练样本字典中, 实现对影像中的空域信息利用, 对影像的总体分类精度分别达到了87.6%和95.1%。 陈善学[12]提出空谱字典加权联合稀疏表示, 根据测试像元与字典原子的空谱联合距离选取字典, 将被选择为字典原子像元的邻域像元扩充到字典, 对Indian Pines和Salinas高光谱影像的总体分类精度都高于97%。 因此利用空谱信息构造字典可以明显提高稀疏表示模型分类和目标检测的精度。
基于伪装网伪装的目标, 相较于飞机、 植被、 建筑物等典型地物, 与所在背景环境之间的光谱差异性较小, 构造背景字典的过程中易混入目标像元, 导致无法识别提取伪装目标。 因此, 以典型草地伪装网、 荒漠伪装网为研究对象, 通过室外实测与预处理获取伪装网在402~998 nm的光谱, 并分析伪装网光谱特征, 进一步利用M600RTK无人机搭载Pika XC2成像光谱仪航测获取两种伪装场景的高光谱影像。 以室外实测光谱数据为参考, 提出一种顾及空谱特征的背景字典选择方法, 进一步利用背景字典稀疏表示提取伪装目标, 并对提取精度进行验证。
实验所用的迷彩伪装网为合成纤维、 纺织布及先进的伪装涂料制作的防光学、 近红外侦察的草地伪装网和荒漠伪装网。 利用美国Spectra Vista 公司的SVC HR-1024地物光谱仪采集两种伪装网光谱信息, SVC HR-1024地物光谱仪的波段范围为350~2 500 nm, 光谱分辨率为2.1 nm, 共计1 024个通道。 为保证光照强度稳定, 选择天气晴朗无风的室外环境进行可见光-近红外光谱实验, 如图1所示。 在伪装材料表面随机选取10个样本点以降低伪装涂料涂抹不均匀带来的影响, 每个样本点测量时转动3次, 每次的转动角度为90° , 每个方向采集3次降低各向异性带来的影响, 每个样本点共采集12条光谱曲线, 进行算术平均值后得到每个样本点实际光谱曲线。 采用S-G(Savitzky-Golay)平滑滤波对光谱数据进行平滑处理[13], 平滑后的光谱数据利用双线性插值法进行光谱重采样, 共获取20条波长范围为402~998 nm, 波段间隔为4 nm, 共计150个波段的光谱数据, 其中包括草地伪装网光谱10条, 荒漠伪装网光谱10条。
 | 图1 室外可见光-近红外光谱采集场景Fig.1 Outdoor visible-near infrared spectral acquisition scene |
将草地伪装网铺设在人工草坪为主的环境中模拟草地伪装场景, 将荒漠伪装网铺设在以荒漠为主的环境中模拟荒漠伪装场景, 如图2所示。 采用经纬M600RTK无人机搭载PikaXC2成像光谱仪对两种伪装模拟场景进行机载高光谱数据的采集, 无人机航线高度为80 m, 机载高光谱成像仪波段范围是400~1 000 nm, 涵盖447个波段通道。 利用Megacube软件将采集的高光谱影像进行几何校正和辐射校正, 采取S-G平滑滤波对高光谱影像进行光谱平滑处理, 利用双线性插值法对高光谱影像进行光谱重采样, 获取402~998 nm波长范围, 150个通道的高光谱影像。
 | 图2 铺设草地、 荒漠伪装材料的草地、 荒漠伪装场景 (a): 草地伪装场景; (b): 荒漠伪装场景Fig.2 Grassland and desert camouflage scenes with grassland and desert camouflage materials (a): Grassland camouflage scenario; (b): Desert camouflage scenario |
利用过完备字典稀疏表示高光谱影像时, 影像中的每个像元的光谱向量都可以利用过完备的目标或背景字典中的少量原子线性组合去重构[14]。 但由于伪装目标与背景光谱相似度高, 在影像中选取伪装目标像元极其困难, 且先验的目标光谱数量不能达到目标字典所需, 因此采用背景字典Ab重构待测像元的光谱, 重构待测像元的光谱如式(1)所示。
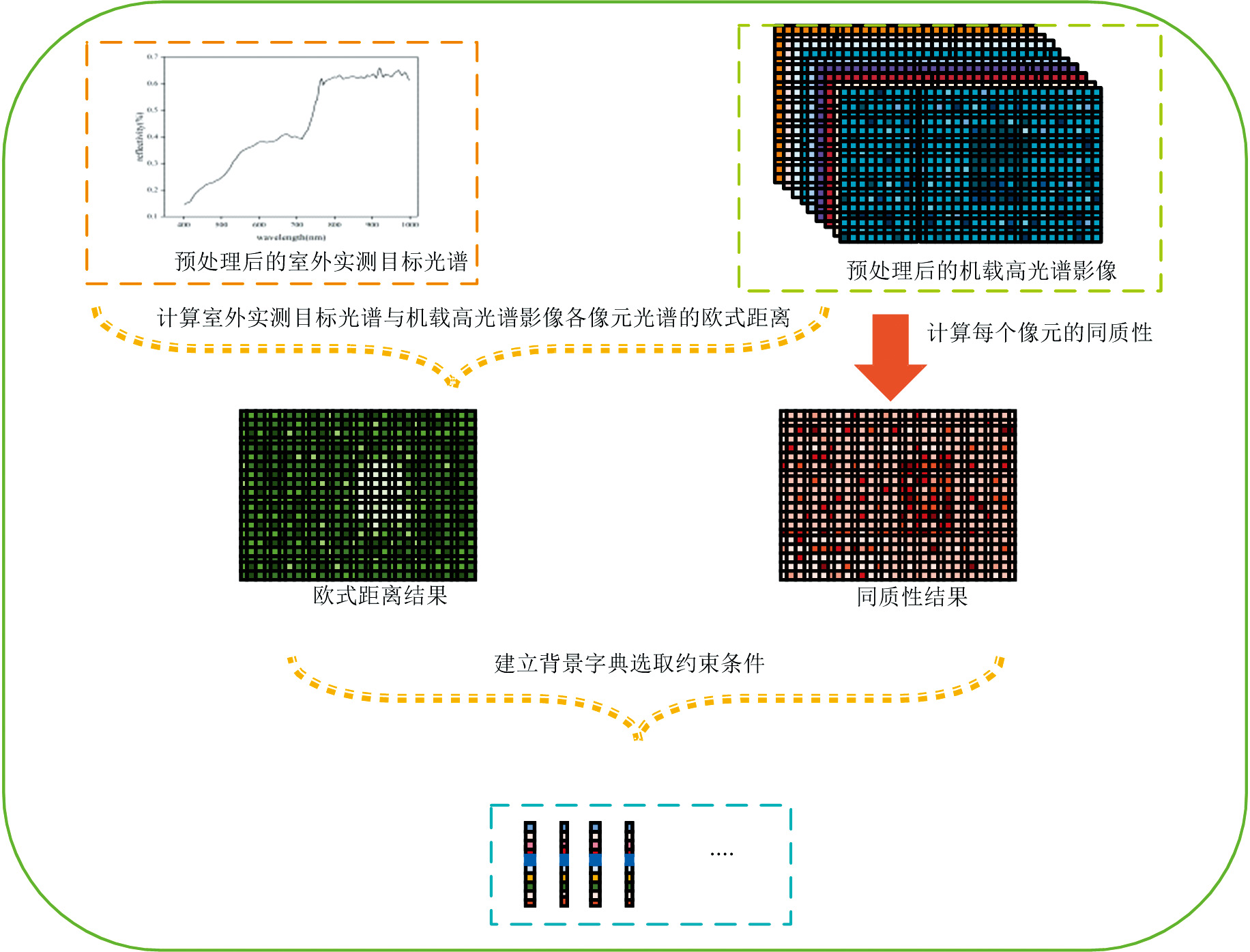
式(1)中, y为影像像元光谱, Ab为背景字典, γ 为稀疏向量。 针对式(1), 提出一种基于空谱特征选取背景字典稀疏表示方法(sparse representation of background dictionary using spatial and spectral feature, SRSS), 通过影像的同质性及与室外实测光谱的欧氏距离, 充分运用机载高光谱影像的空谱特征, 选取纯净的背景像元用于背景字典稀疏表示, 根据对待检测像元光谱的重构误差判断是否属于目标。
背景字典Ab∈
 | 图3 背景字典选取流程图Fig.3 Flowchart of background dictionary selection |
(1) 首先计算室外实测目标光谱与影像每个像元光谱的欧式距离值来判断影像的像元光谱与室外实测目标光谱的差异性, 公式如式(2)所示。
式(2)中, d为影像中像元与室外实测目标光谱的欧式距离值, yi为影像中像元在第i个波段的值, ri为室外实测目标光谱第i个波段的值, k为波段数量。
其次, 对影像设置n× n的滑动窗口(n为奇数, 在此选择5× 5滑动窗口), 计算每个像元的同质性值。 同质性值越小代表像元的同质性越高, 其与周围像元属于同一地物的可能性越大, 计算如式(3)所示。
式(3)中, μ i为第i个波段上n× n窗口内像元的均值, yui为n× n滑动窗口内第i个波段上第u个像元值, θ 为像元的同质性值。
建立背景字典选取约束条件, Ab=f(d> dmax, θ < θ min), 其中dmax代表与室外实测目标光谱欧式距离值大的像元光谱, 取累计百分比为85%的d值。 θ min代表同质性高的像元, 取累计百分比为15%的θ 值。
之后, 利用获取的背景字典Ab∈
式(4)中, γ 1为最优的稀疏向量, ‖ γ ‖ 0表示γ 的0范数, 即非零元素的个数, L为稀疏系数个数的上限, 通过正交匹配追踪算法[15]求解稀疏向量γ 1。 当获取重构系数为最优系数γ 1时, 可通过式(5)获取背景字典重构像元光谱向量误差的大小, 即为模型SRSS的输出值。
式(5)中, DSRSS为模型输出值, 通过设置阈值β , 当检测器DSRSS的输出值大于β , 代表存在目标, 反之目标不存在。
本文通过接受者操作特征(receiver operating characteristic, ROC)[16]曲线下的面积(area under curve, AUC)对目标识别结果进行精度评定。 ROC曲线是以虚警率(false positive rate, FPR)为横坐标, 检测率(true positive rate, TPR)为纵坐标, 绘制出的曲线, 其中虚警率(FPR)表示被错误地检测为目标像元的数量占所有背景像元的比例, 检测率(TPR)表示模型识别出的真实目标像元数量占实际目标像元总数的比例。 AUC的取值范围是0.5~1, AUC值越高, 说明算法对目标识别效果越好。
为直观显示各类算法对伪装目标检测的适用性, 将本文提出的算法与Reed-Xiaoli(RX)[17], 约束能量最小化(constrained energy minimization, CEM)[18]、 光谱匹配滤波(spectral matched filter, SMF)[19]、 稀疏表示(sparse representation for target detection, STD)[14]算法的检测结果进行对比分析。
基于草地伪装的室外光谱实验与机载影像光谱(如图4): 在400~700 nm波长范围内, 室外实测光谱、 背景像元、 目标像元光谱的反射率差异不大, 且都在550 nm附近出现波峰, 700 nm附近出现波谷, 随后在700~750 nm波段区间显著上升, 但背景像元光谱的上升趋势更加显著, 在750~1 000 nm波长范围内, 三者的总体变化趋势都趋于平缓。
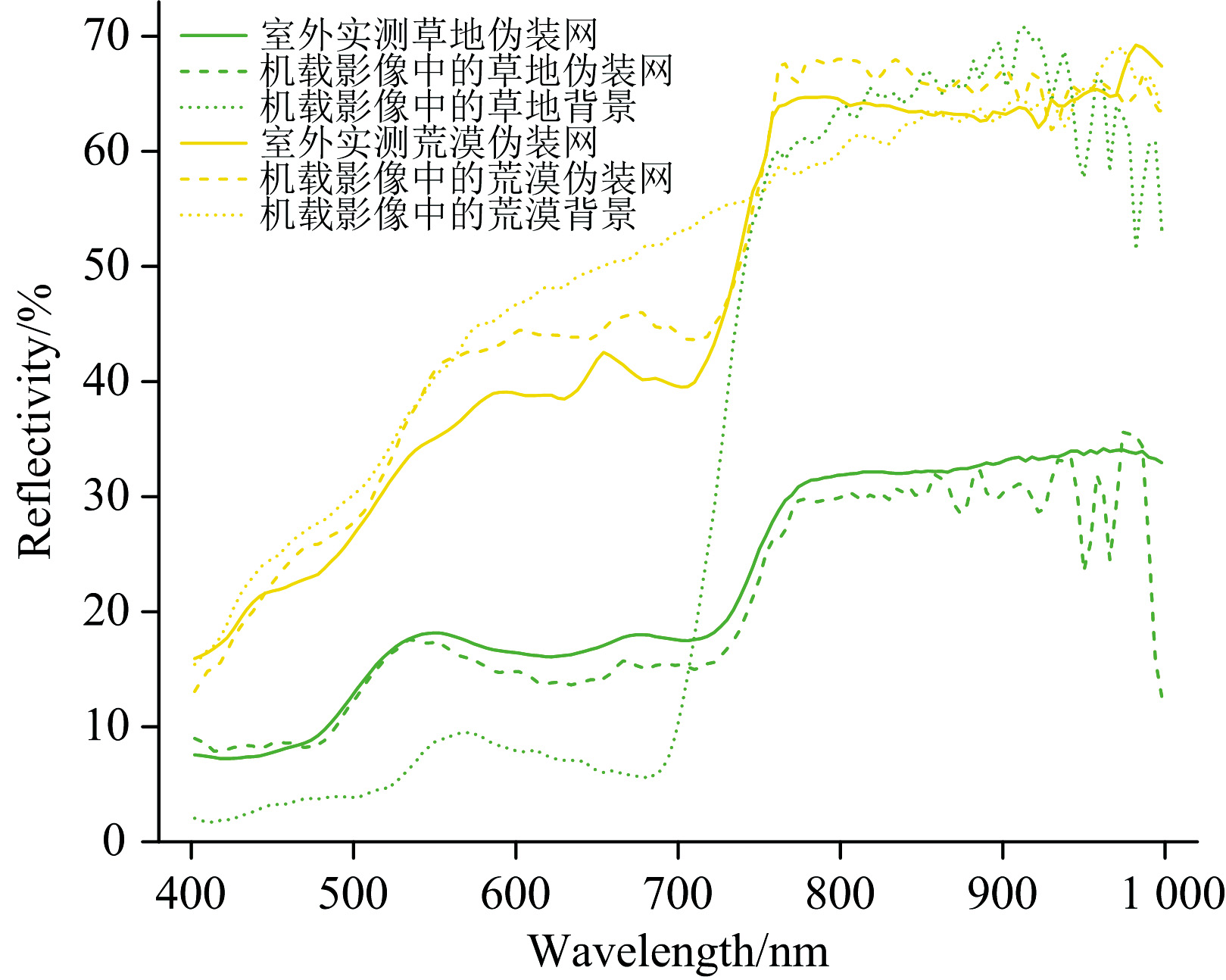 | 图4 室外实测伪装网光谱与机载影像光谱Fig.4 Outdoor measured spectra of camouflage netting and airborne imagery spectra |
基于荒漠伪装的室外光谱实验与机载影像光谱(如图4): 目标像元光谱、 室外实测光谱总体呈上升趋势, 在波长为700 nm附近出现波谷; 背景像元光谱总体呈缓慢上升趋势, 在550~700 nm波长范围内反射檬高于目标像元光谱与室外实测目标光谱, 其余波长范围的反射率与二者都较为相近。
如图5所示, 草地伪装影像及其欧氏距离值影像和同质性值影像。 除了伪装目标的欧式距离值偏低, 在背景中, 也有部分草地光谱与伪装网光谱相似, 导致在背景中有部分像元欧式距离偏低, 与伪装目标相似。 如图6所示, 在荒漠伪装的欧式距离图中, 背景中也存在欧式距离偏低的像元。 因此, 为了避免在选择背景像元时, 将目标部分欧式距离值偏高的像元选择进去。 保证背景字典的纯净度以及与目标的差异性最大, 进一步考虑影像的同质性特征, 即最终背景字典的像元与伪装网光谱欧式距离最大, 且同质性最高。
 | 图5 (a): 草地伪装影像; (b): 欧式距离影像; (c): 同质性影像Fig.5 (a): Grassland camouflage image; (b): Euclidean distance image; (c): Homogeneous image |
 | 图6 (a): 荒漠伪装影像; (b): 欧式距离影像; (c): 同质性影像Fig.6 (a): Desert camouflage image; (b): Euclidean distance image; (c): Homogeneous image |
最终, 通过考虑欧式距离和影像同质性两个约束条件, 获得的草地伪装影像和荒漠伪装影像背景字典像元如图7所示。 草地伪装影像中被选为背景字典的像元的欧式距离值范围为3.3~5.2, 同质性范围为0~0.001 7, 共选取413个像元光谱作为背景字典。 荒漠伪装影像中被选为背景字典的像元的欧式距离值范围为0.83~1.21, 同质性值范围为0~0.000 14, 共选取507个像元光谱构成背景字典。
 | 图7 背景字典散点图 (a): 草地伪装背景字典散点图; (b): 荒漠伪装背景字典散点图Fig.7 Background dictionary scatterplot (a): Grassland camouflage background dictionary scatterplot; (b): Desert camouflage background dictionary scatterplot |
基于选择的背景字典, 利用背景字典稀疏表示算法对影像中的草地伪装目标、 荒漠伪装目标进行识别, 其中稀疏度L设置为5, 并与真实的检测结果、 RX、 CEM、 SMF、 STD算法的检测结果进行对比分析。
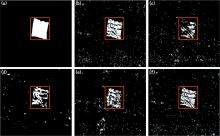
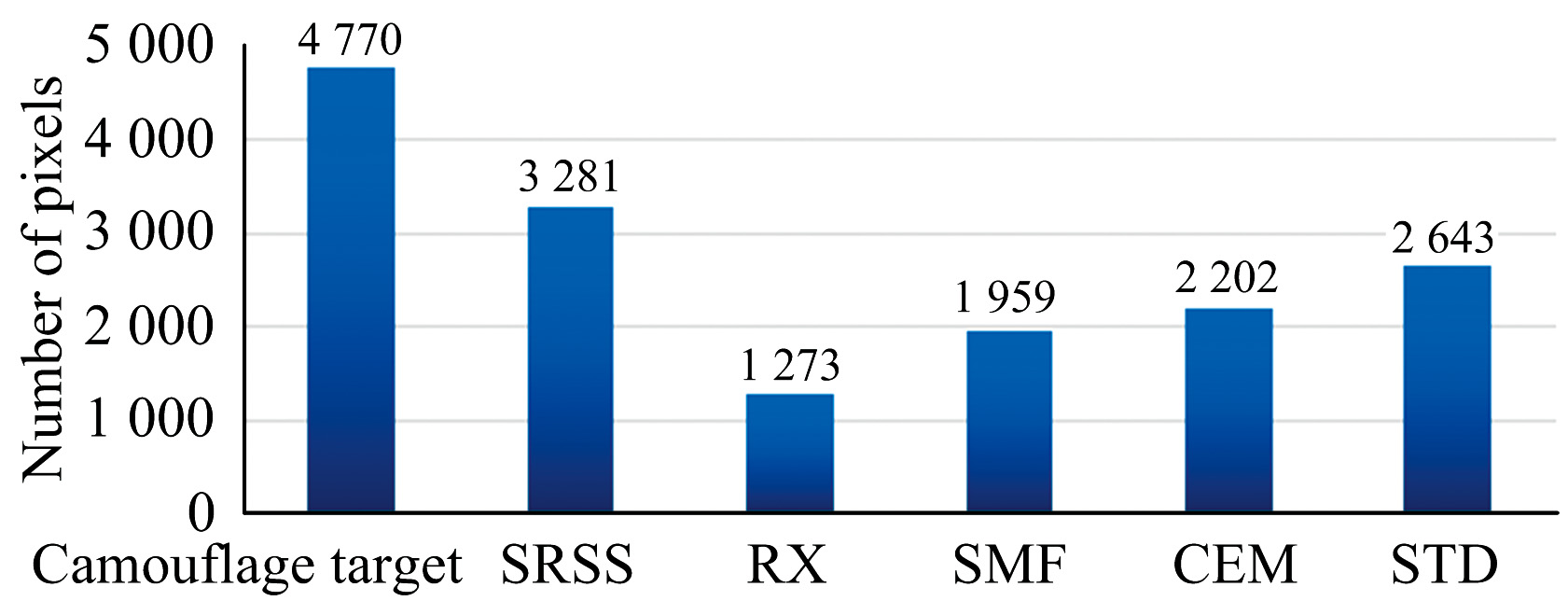
在虚警率为1%的条件下, 草地伪装目标的二值检测结果及检测出的正确像元数量统计结果如图8、 图9所示。 SRSS算法对草地伪装目标的检测效果最佳, 检测出3 281个目标像元。 其次为STD、 CEM、 SMF算法, 分别检测出2 643、 2 202、 1 959个目标像元。 RX检测出的目标像元最少, 共计1 273个目标像元。
 | 图8 草地伪装二值结果 (a): 真实结果; (b): SRSS; (c): RX; (d): CEM; (e): SMF; (f): STDFig.8 Grassland camouflage binary results (a): Real results; (b): SRSS; (c): RX; (d): CEM; (e): SMF; (f): STD |
 | 图9 虚警率1%条件下真实草地伪装目标像元识别数量Fig.9 Number of real grassland camouflage target image elements recognized under 1% false alarm rate condition |
利用高斯滤波平滑的方法设置5× 5的窗口对虚警率为1%的二值结果进行平滑处理去除误检像元的影响, 结果如图10所示。 与图8相比, SRSS、 STD算法目标周围误检的背景像元在平滑后都被去除, 可直观判别草地伪装目标的分布位置与数量, RX、 CEM与SMF算法在平滑处理后在背景区域仍有一些分布集中的像元无法滤除, 对判别草地伪装目标的数量与位置造成干扰。
 | 图10 草地伪装二值检测结果的高斯平滑结果 (a): 真实结果; (b): SRSS; (c): RX; (d): CEM; (e): SMF; (f): STDFig.10 Gaussian smoothing results of binary detection results of grassland camouflage (a): Real results; (b): SRSS; (c): RX; (d): CEM; (e): SMF; (f): STD |
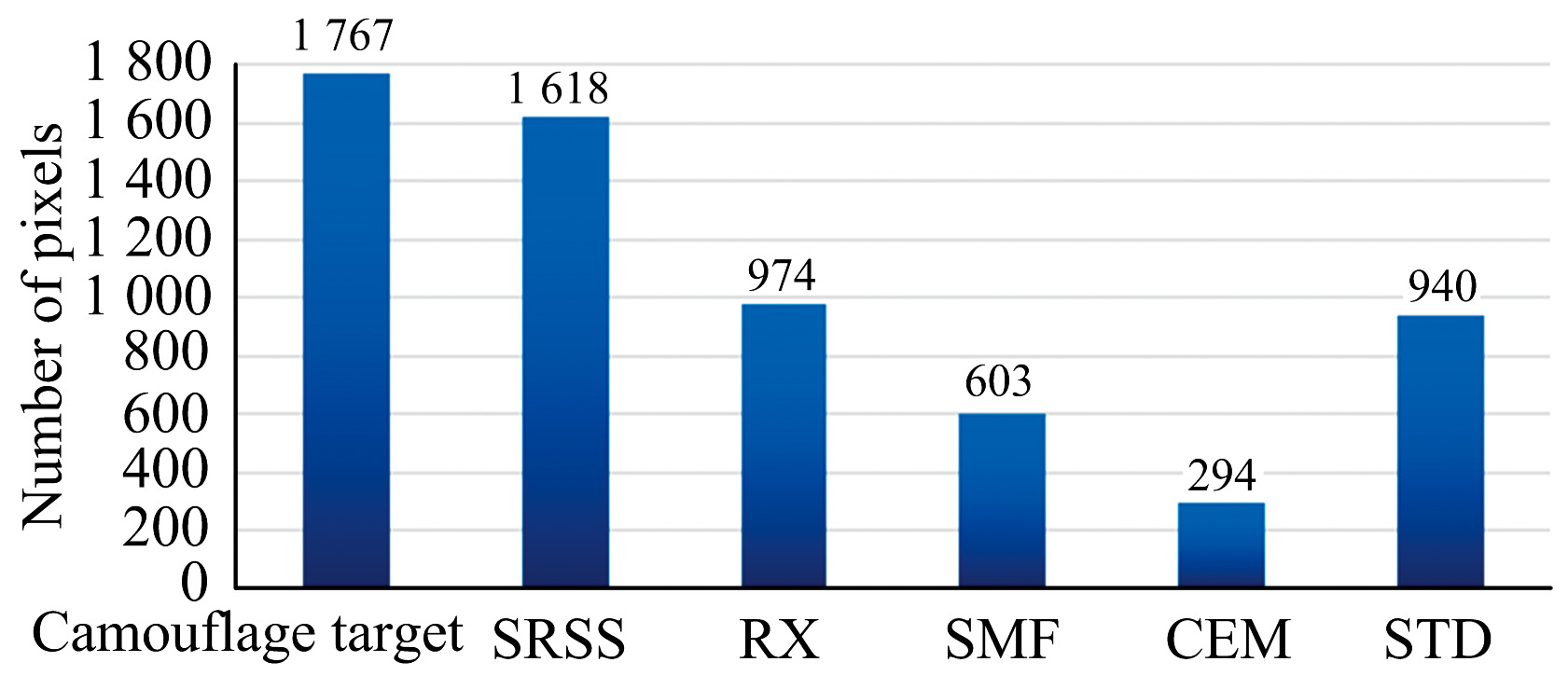
在虚警率为1%的条件下, 荒漠伪装目标的二值检测结果及检测出的正确像元数量统计结果如图11、 图12所示。 SRSS算法对荒漠伪装目标检测最好, 检测出1 618个目标像元。 其次是RX和STD算法, 分别检出了974和940个目标像元。 再后是SMF算法, 检测出603个荒漠伪装目标像元。 检测数量最低的是CEM算法, 检测出294个目标像元。
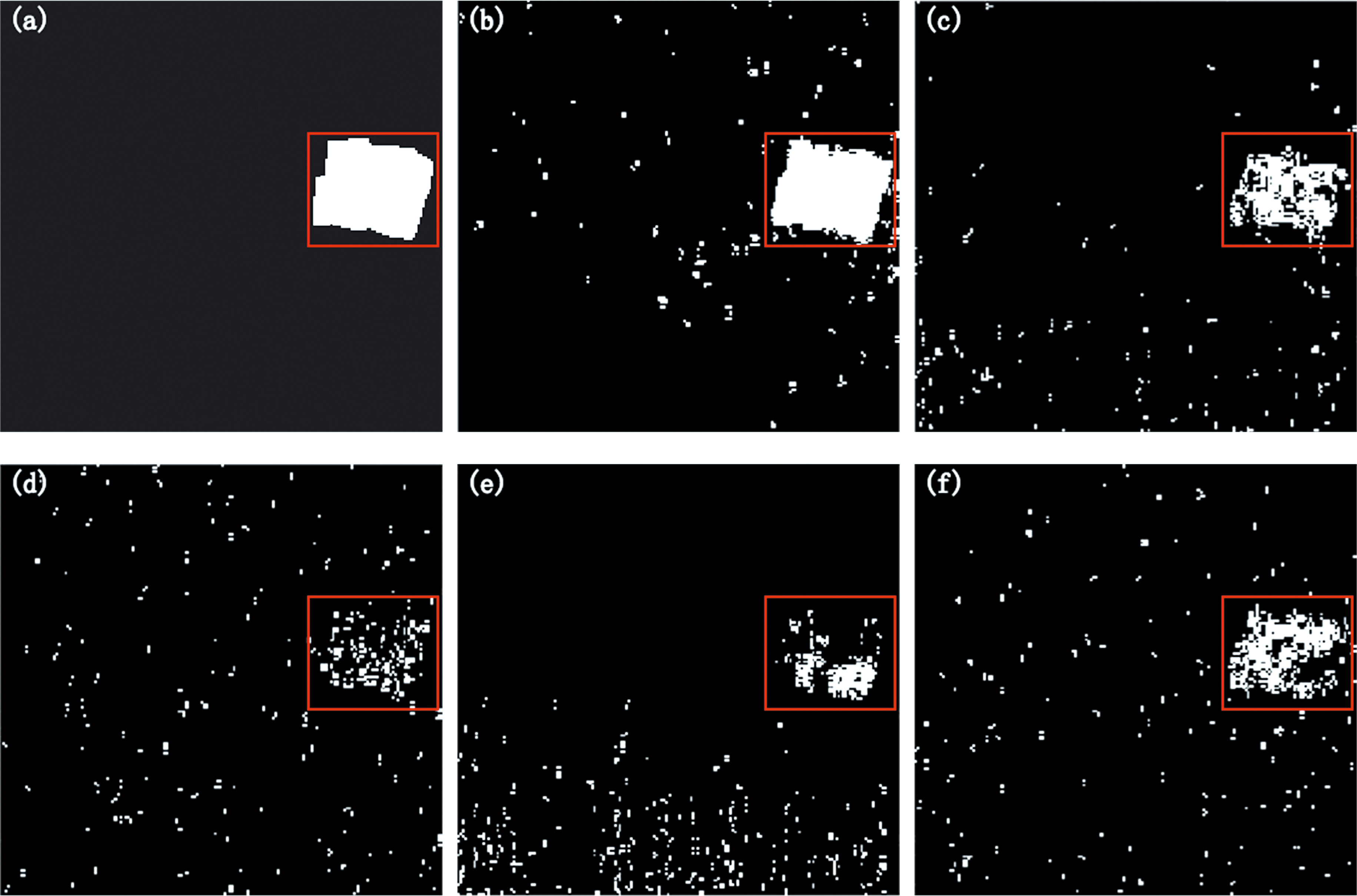 | 图11 荒漠伪装二值结果 (a): 真实结果; (b): SRSS; (c): RX; (d): CEM; (e): SMF; (f): STDFig.11 Desert camouflage binary results (a): Real results; (b): SRSS; (c): RX; (d): CEM; (e): SMF; (f): STD |
 | 图12 虚警率1%条件下真实荒漠伪装目标像元识别数量Fig.12 Number of real desert camouflage target image elements recognized under 1% false alarm rate condition |
对虚警率为1%的二值结果进行高斯滤波平滑处理, 结果如图13所示, 与图11对比: SRSS、 RX、 STD算法检测的二值影像中目标周围误检的背景像元在平滑后都被去除, 可以直观的判别荒漠伪装目标的分布位置与数量, CEM算法检测的二值影像结果在平滑处理后, 存在目标像元较少, 无法判定是否存在目标。 SMF算法检测的二值影像中误检为目标的背景像元集中分布于影像下方区域, 在经过平滑处理后原本零散的像元点被连为整体, 造成伪装目标数量与位置的误判。
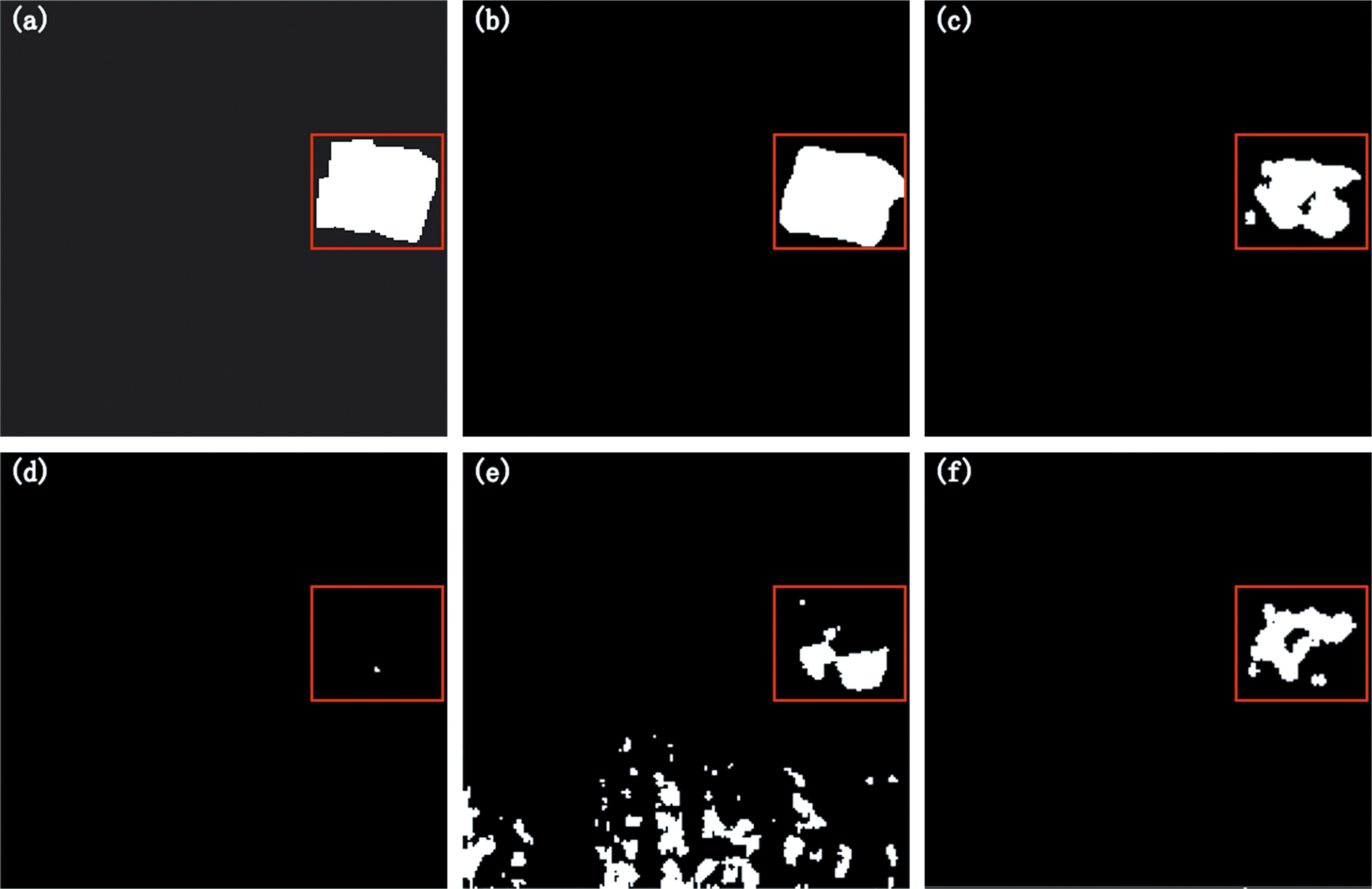 | 图13 荒漠伪装二值检测结果的高斯平滑结果 (a): 真实结果; (b): SRSS; (c): RX; (d): CEM; (e): SMF; (f): STDFig.13 Gaussian smoothing results for desert camouflage binary detection results (a): Real results; (b): SRSS; (c): RX; (d): CEM; (e): SMF; (f): STD |
通过图14的对比结果可以看出, SRSS算法对草地伪装目标、 荒漠伪装目标的ROC曲线均高于RX、 SMF、 CEM、 STD算法, 对草地伪装目标、 荒漠伪装目标检测的AUC值分别达到了0.96与0.98, 高于与之对比的RX、 SMF、 CEM、 STD算法, 表明了SRSS算法对两种伪装目标的检测效果更好, 稳定性更强。
 | 图14 ROC曲线 (a): 针对草地伪装目标检测的ROC曲线; (b): 针对荒漠伪装目标检测的ROC曲线Fig.14 ROC curves (a): ROC curve for grassland camouflage target detection; (b): ROC curve for desert camouflage target detection |
针对草地伪装网、 荒漠伪装网伪装目标识别, 设计了室外高光谱观测实验以及机载高光谱成像实验。 对室外实测得到的两种伪装网光谱、 机载高光谱影像中伪装目标光谱与背景光谱进行分析。 之后, 在背景字典稀疏表示方法的基础上, 利用影像的空谱特征, 提出基于欧式距离和同质性差异的背景字典构建约束条件, 提高背景字典的纯净度。 最后, 通过基于空谱特征选取背景字典稀疏表示算法对机载高光谱影像中草地伪装目标与荒漠伪装目标进行检测, 得到以下结论:
(1) 室外实测草地伪装目标的光谱与影像中背景像元光谱及目标光谱形态相似, 但在700~750 nm的波长范围, 背景像元的反射率上升的更加显著, 远高于目标像元光谱与室外实测的目标光谱, 且在750~1 000 nm范围内, 一直高于目标光谱。 对于荒漠伪装: 室外实测光谱和目标像元光谱都与背景像元光谱具有一定差异性, 在550~700 nm波长范围内, 背景像元光谱反射率高于室外实测与机载高光谱影像中目标光谱的反射率。
(2) 通过背景像元光谱与室外实测目标光谱欧式距离最大, 且在5× 5的空域窗口内同质性最高, 分别建立了顾及空谱特征的草地伪装和荒漠伪装影像的背景字典约束条件, 最终在草地伪装影像与荒漠伪装影像中自动获取413、 507个像元的光谱作为背景字典。
(3) 本文提出的SRSS算法, 在虚警率为1%的条件下获取的二值检测结果, 可以精确判别伪装目标的位置与数量。 并且对草地伪装目标与荒漠伪装目标检测的AUC值分别达到了0.96和0.98, 证明了SRSS算法对草地伪装目标与荒漠伪装目标具有良好的检测效果。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|