


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
高精度线扫式光谱共焦位移传感器光学系统设计
[杨伟光1, 2  , 张周锋
, 张周锋1, * , 齐美捷1 , 闫佳悦1, 2 , 程默涵1, 2 ]
, 张周锋, 齐美捷|
|


作者简介: 杨伟光, 1999年生, 中国科学院西安光学精密机械研究所硕士研究生 e-mail: yangweiguang@opt.ac.cn
光谱共焦位移传感器是一种新型几何量精密测量传感器, 具有高精度, 高效以及非接触的技术优势, 目前被广泛应用于微观或宏观几何量的精密测量。 传统的几何量测量传感器采用接触式机械探针, 对物体表面造成损伤, 难以满足现代化制造业无损测量的需求。 不同于传统的光学系统需要校正轴向色差, 光谱共焦位移传感器利用轴向色差建立位移和波长之间的关系。 然而目前针对光谱共焦位移传感技术的研究大多集中于点扫式, 仅能获取单个点位的几何量信息, 在实际应用中需要较大区域的精密测量, 故而效率受到极大的限制, 并且对后端数据处理要求较高, 数据重构较为繁琐。 针对该技术弊端, 设计出一种线扫式光谱共焦位移传感器系统, 达到了亚微米的分辨率。 对线扫式光谱共焦位移传感器进行原理分析, 开展了大量程色散物镜、 高光谱分辨率成像光谱仪的详细设计。 通过对色散物镜和成像光谱仪光路结构的优化及像差的平衡, 使得全系统各视场RMS半径小于5.5 μm, 得到了很好的成像质量。 结果表明, 全系统在扫描线长10 mm, 轴向量程范围3 mm, 分辨率达到0.8 μm。 该研究在高效、 高精度几何量精密测量领域具有广阔的应用前景。
Spectral confocal displacement sensor is a new geometric precision measurement sensor with high accuracy, high efficiency, and non-contact technical advantages. It is now widely used in measuring micro or macro geometric quantities. Conventional geometric measurement sensors use contact mechanical probes, which cause damage to the surface of the object, making it difficult to meet the needs of non-destructive measurement in modern manufacturing. Unlike conventional optical systems that require correction for axial chromatic aberration, spectral confocal displacement sensors use axial chromatic aberration to establish the relationship between displacement and wavelength. However, most current research on spectral confocal displacement sensing technology has focused on point sweep. This technique can only obtain the geometric information of a single point, which greatly limits the efficiency in the practical application of precision measurement of larger areas and requires high back-end data processing and cumbersome data reconstruction. This study designs a line-swept spectral confocal displacement sensor system with submicron resolution to address this technical drawback. This study analyzes the principle of the line-swept spectral confocal displacement sensor and the detailed design of a large-range dispersive objective lens and a high spectral resolution spectral spectroscopic unit is carried out. By optimizing the optical path structure of the dispersive objective and spectral spectroscopy unit and balancing the aberrations, the RMS radius of each field of view of the full system is less than 5.5 μm, and good imaging quality is obtained. The results show that the full system has a resolution of 0.8 μm at a scan line length of 10 mm and an axial range of 3mm. This study has a broad application prospect in high-efficiency and high-precision geometric precision measurement.
随着精密制造业的快速发展, 对精密测量[1]技术的要求也越来越高。 三维形貌检测技术能够获取表面特征, 在三维重建, 机器视觉, 工业检测, 生物医学等领域应用广泛[2, 3]。 随着精密制造业的高要求, 三维形貌[4]技术也在向着高速, 高精度的方向发展。 例如在芯片制造过程中, 需要进行芯片的尺寸精度测试, 表面粗糙度的测量, 厚度一致性, 晶圆中心线与晶圆对角线尺寸一致性, 硅片高度测量精度等一系列检测, 都要求精度在微米级以内。 文物重建, AR旅游都需要获得物体表面的三维信息来实现三维重建。 在电子制造领域, 需要对各种电子元器件微小尺寸电子元器件进行定位和测量, 从而提高其制造精度和故障检测准确性。 在航空航天领域中, 需要对航空器以及航天器进行位移、 形变、 振动等性能参数测量, 这些参数的高精度测量有助于提高飞行安全性和性能。 在生物医学领域, 需要对组织、 器官、 细胞等进行位移和振动测量, 而人体的细胞大小都在微米量级, 实现对组织和细胞形态结构的精确测量, 可以为疾病诊断和治疗提供可靠数据支持。
三维形貌测量的非接触测量方法有视觉检测[5], 激光测量以及光谱共焦技术。 视觉检测的方法主要是基于结构光与双目视觉结合的方法, 通过提取与被测轮廓重合的激光光线, 结合双目视觉的数学模型来实现物体表面深度信息的测量, 进而实现三维形貌测量, 但该方法无法达到亚微米级别的测量精度。 激光测量是基于激光三角法的测量, 激光器向被测物体表面发出激光光线, 部分光线通过成像镜组到达探测器像面, 被测物体上的点和探测器像面上的点有一一对应的关系; 通过公式可以计算出两者之间的关系, 再结合扫描装置, 可以实现三维形貌测量, 但该方法受到被测物体表面反射和散射属性的限制, 仅适合于高反射表面的测量[6]。
近年来, 光谱共焦技术已经成为三维表面形貌测量中最有发展潜力的方法之一。 光谱共焦技术利用轴向色散取代了机械扫描, 是一种新型的光电位移传感器, 具有非接触, 小焦点, 高精度可灵活集成等优点[7]。
光谱共焦位移传感技术主要包括两方面: 色散物镜和成像光谱仪, 按照扫描方式主要可分为点扫式和线扫式两种方式。 其中单点光谱共焦位移传感器测量物体面型时需配合二维扫描位移台, 在一些大面型物体的检测上存在速度慢的缺点。 而线扫式利用扫描线可以进行一维测量, 配合一维位移装置, 能实现连续高速的三维形貌测量。
国内外学者针对光谱共焦技术进行了深入的研究, 关于点扫式光谱共焦位移传感技术, 2020年Dawoon[8]对光谱共焦技术中的光源进行改进, 提出了基于扫频光源的光谱共焦系统, 对提出的SS-CCM系统测试结果表明, 该系统在770~820 nm扫频波长范围内的轴向色焦距范围约为360 μ m。 2021年Zakrzewski等[9]搭建了一种由彩色共聚焦位移传感器和光学激光头组成的光学系统, 该光学系统的工作距离达到了250 mm, 具有较高的精度, 测量范围为10 mm, 分辨率为1 μ m。 国内研究相对起步较晚, 近些年开始对光谱共焦技术进行研究, 也取得了不错的成绩。 2021年Yu等[10]针对光谱共焦系统测量彩色样品时出现特征曲线漂移的问题, 提出了一种提高彩色样品测量精度的校正方法; 实验数据表明, 通过颜色校正方法, 测量误差可以控制在10 nm以内, 与未进行颜色校正的测量相比, 测量精度明显提高。 以往关于光谱共焦系统的光谱特性研究仅仅描述信号强度-波长特性而没有考虑位移-波长关系。 2021年Chen等[11]提出一种二维光谱信号模型来描述强度-波长-位移之间的特性, 试验结果证明了该模型的有效性, 该模型对光谱共焦测量系统的设计有较大的理论意义。 2021年Wang等[12]利用光谱共焦点扫描测量系统对高精度自由曲面进行在机非接触扫描, 确定扫描参数和设计了扫描系统的运动轨迹, 结果表明其最大偏差小于1.5 nm, 实际测量偏差约为2 μ m, 并生成了数控程序实现了在线检测。 2021年Bai[13]等采用三个光谱共焦探针进行圆度测量, 通过对三探针的方向和离轴距离优化并利用精密旋转平台搭建了实验装置, 测量结果与超精密圆度仪相比, 误差仅为0.7%。
国外也展开了线扫式光谱共焦位移传感器中色散物镜设计的研究, 例如日本的基恩士公司, 德国的precitec公司都既有点和线扫式光谱共焦位移传感器, 法国STIL公司一直都是光谱共焦位移传感器领域的领军者, 其生产的MPLS-DM首次实现线扫式功能, 产品扫描线长最大可达到12.85 mm, 色散范围可达到2.6 mm。 2018年Seppä 等[14]提出了一种针对凹槽样本的线扫式光谱共焦测量和检验方法, 在深度方向上获得亚微米级测量精度。
国内关于线扫式光谱共焦位移传感器中色散物镜设计方面的研究寥寥无几。 2021年Hu[15]等采用普通球面透镜设计色散物镜, 获得了2.4 mm的色散范围同时具有8 mm的扫描线长。
综上所述, 国内外关于光谱共焦位移传感器的研究大多针对点扫式, 而点扫式需要精密的三坐标精密位移轴来进行三维移动, 难以实现高速测量, 且点扫描获得数据量较大使得后端数据处理难度增加。 线扫式产品几乎被国外垄断, 国内针对线扫式的研究在主要性能指标上有较大差距, 如: 扫描线长和色散范围。
以线扫式光谱共焦位移传感技术为目标, 针对该领域全系统的研究缺口和色散物镜性能指标提升展开研究, 通过对光谱共焦位移传感器进行详细的理论分析, 对色散物镜和成像光谱仪进行仿真设计, 对标国外相同应用场景下的优势光谱共焦产品, 在扫描线长和色散范围上进行提升。 结果表明, 该系统在扫描线长和色散范围要优于国外产品, 且分辨率达到亚微米级别。
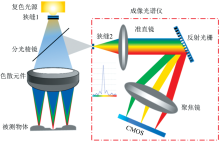
图1为线扫式光谱共焦原理示意图。 它主要由复色光源、 色散物镜和成像光谱仪三部分组成。
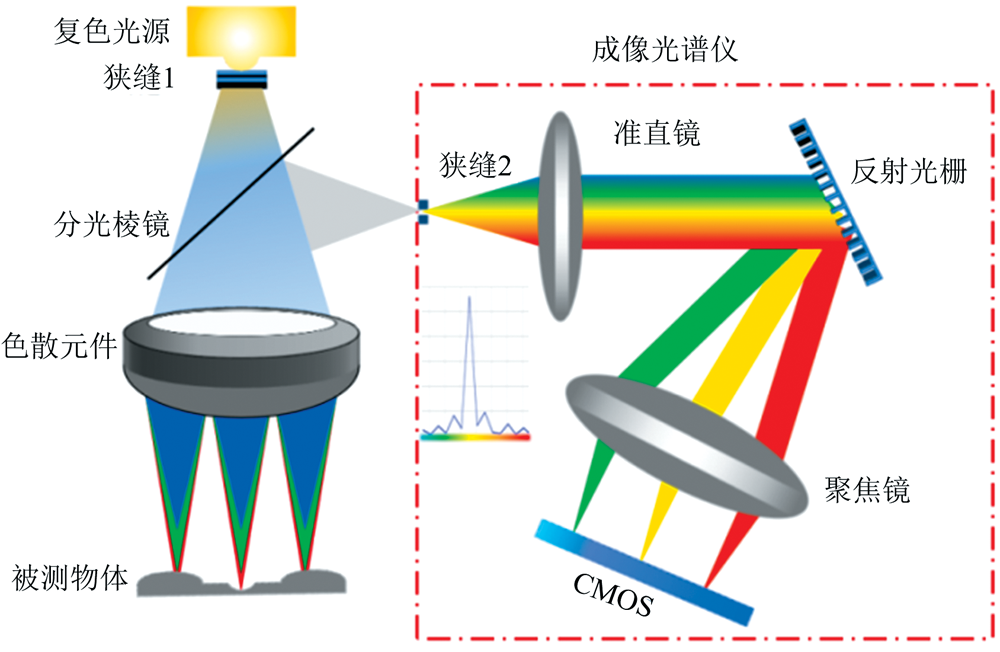 | 图1 光谱共焦原理示意图Fig.1 Schematic diagram of spectral confocal |
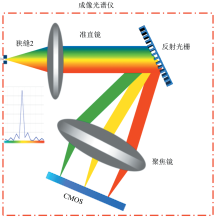
光源能提供稳定的高亮度的复色光, 该系统波段范围是500~650 nm, 带宽是150 nm, 设计中心波长为550 nm。 色散物镜和分光棱镜一起决定了系统的轴向测量范围。 经被测表面反射的光线经过分光棱镜进入到成像光谱仪。 成像光谱仪主要由狭缝、 准直镜、 反射光栅、 聚焦镜和探测器组成。
复色光源发出的光经过狭缝和分光棱镜进入色散物镜, 由于不同波长的光在同一介质中的折射率不同, 通过色散物镜后不同波长的光会聚焦在光轴上不同位置, 即轴向色散。 当被测目标位于色散范围内时, 聚焦到被测表面的光线再次穿过色散物镜和分光棱镜进入到共焦狭缝, 没有聚焦到被测物体表面上的光线不能通过共焦狭缝, 从共焦狭缝发出的光线经过准直镜到达反射光栅, 再经聚焦镜的聚焦到CMOS探测器像面。 然后提取谱段的峰值波长, 通过建立波长和位移量之间的关系, 进而获得被测表面的深度信息。 从原理来看, 色散物镜是整个线扫式光谱共焦位移传感技术的核心, 系统的测量范围和扫描线长都受色散物镜光学结构的影响。 系统色散方向的分辨率则由成像光谱仪和色散物镜共同决定。 表1为高精度线扫式光谱共焦位移传感器的设计目标。
| 表1 高精度线扫式光谱共焦位移传感器设计目标 Table 1 Design goal of high-precision line-scanning spectral confocal displacement sensor |
线扫式光谱共焦位移传感技术的设计难点:
(1) 相对于点扫式引入了扫描线长, 在色散物镜的光学设计中轴外像差激增, 给设计增加很大的难度。
(2) 线扫式光谱共焦位移传感器的色散物镜设计需要双远心光路, 物方需要保证绝对远心, 这样可以保证进入光谱仪中的光能量均匀, 像方远心则要求没有那么高, 在1° 以内即可, 可以消除不同波长放大倍率不同带来的影响。
(3) 目前对色散物镜的研究较多, 针对色散物镜后端的成像光谱仪研究很少, 往往采用商业化的产品; 要实现高精度的测量, 对成像光谱仪的光谱分辨率要求很高。
线扫式光谱共焦位移传感技术的测量范围主要由色散物镜决定。 色散物镜的设计要求为: 在保证扫描线长达到设计指标的情况下, 减少透镜片数, 缩短距离, 尽量减小各个视场的弥散斑半径, 并保证色散范围达到设计要求。
色散物镜的设计指标分为色散特性指标和光学设计指标。 根据上述高精度线扫式光谱共焦位移传感器的设计目标, 对色散物镜的色散特性参数进行指标分配; 如表2所示。
| 表2 色散物镜色散特性参数指标 Table 2 Parameters of dispersive objective lens |
色散物镜设计与一般光学设计不同的是不仅不校正轴向色差, 而且还要增大轴向色差, 并且尽量保证线性色散。 轴向色差一般用F光和C光成像位置的差表示
式(1)中, l'F和l'C分别表示用F光和C光的折射率计算近轴光路所得到的近轴像距。 色散物镜的波段范围为λ 0-λ 1, 则色散物镜对应的轴向色差Δ l'FC为
线性轴向色差的理论公式如式(3)[16]所示
色散物镜的光学设计指标包括: 物方孔径, 工作距离, 放大倍率, 双远心光路远心度, 物方视场等参数。 经过上述色散物镜的理论分析, 针对线扫式光谱共焦位移传感器技术的设计难点, 提出了一种适合线扫式色散物镜的光学设计方法:
(1) 根据上述式(3)对初始结构的玻璃材料进行选择; 初始结构的选择有两种方法, 一种是运用近轴光学知识来计算初始结构参数, 再逐步调整达到设计目标, 但该方法对设计人员要求较高, 仅仅靠设计人员计算难以得出一个好的初始结构。 另一种是在已公开的文献或者专利中挑选一个合适的初始结构, 对所挑选结构进行优化设计。 初始结构挑选的原则是F数和视场角与设计指标匹配, 焦距可以通过软件缩放或者增大。 单片折射透镜不能获得线性色散, 因此需要多片透镜按照光学原理组合。 选择初始结构为双高斯结构, 以该结构作为起点开始设计。 该结构完全对称, 垂轴像差自动抵消, 简化了像差矫正过程。
(2) 色散物镜的色散范围主要由轴向色差来决定, 选择初始结构后, 在zemax设置多重结构来优化轴向色散。 首先, 以透镜材料为变量将轴向色散进行初步优化, 然后增加透镜半径和间隔以及厚度为变量, 根据设计指标添加操作数来控制色散范围、 像差、 放大倍率等因素。 在多重结构中设置一系列的波长, 使用AXCL操作数控制轴向色差及其线性度。
(3) 像差校正的方法: 除了轴向色差之外, 像差校正也是色散物镜设计需要重点注意的, 线扫式光谱共焦位移传感技术相对于点扫式引入了扫描线长, 也就是轴外像差, 轴外像差会随着视场的变大以幂函数的方式激增, 这也是线扫式光谱共焦位移传感技术的难点之一, 需要校正像差主要包括: 轴上点球差, 轴外像差, 以及色差。
像差矫正的方法有以下两种: (1) 对像差变化较大的玻璃, 采用玻璃替换的方式。 (2) 对相对孔径h/r或入射角很大的面使其弯向光, 以减小轴外像差。
根据上述理论分析, 使用光学设计软件zemax进行色散物镜的设计, 工作波段为500~650 nm, 选择的探测器像元大小为5.5 μ m。 最终的优化光学结构如图2所示。
 | 图2 色散物镜的优化后的结构图Fig.2 Optimized structure of dispersive objective lens |
光学系统的点列图代表光学系统能量集中度。 如图3所示为优化后色散物镜的点列图, 由图3可知色散物镜各个波长的像差都得到了很好的校正且RMS直径均小于5.5 μ m。
 | 图3 点列图 (a): 500 nm点列图; (b): 550 nm点列图; (c): 600 nm点列图; (d): 650 nm点列图Fig.3 Spot diagram (a): 500 nm spot diagram; (b): 550 nm spot diagram; (c): 600 nm spot diagram; (d): 650 nm spot diagram |
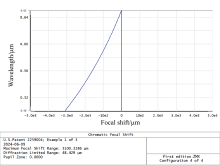
色焦移曲线就是用于确定光学系统轴向色差和波长的函数关系, 因此色焦移的大小可以作为评价色散范围大小的指标。 图4所示为色散物镜的色焦移图, 色焦移大于3 mm, 线性度拟合判定系数R2为0.992 1。
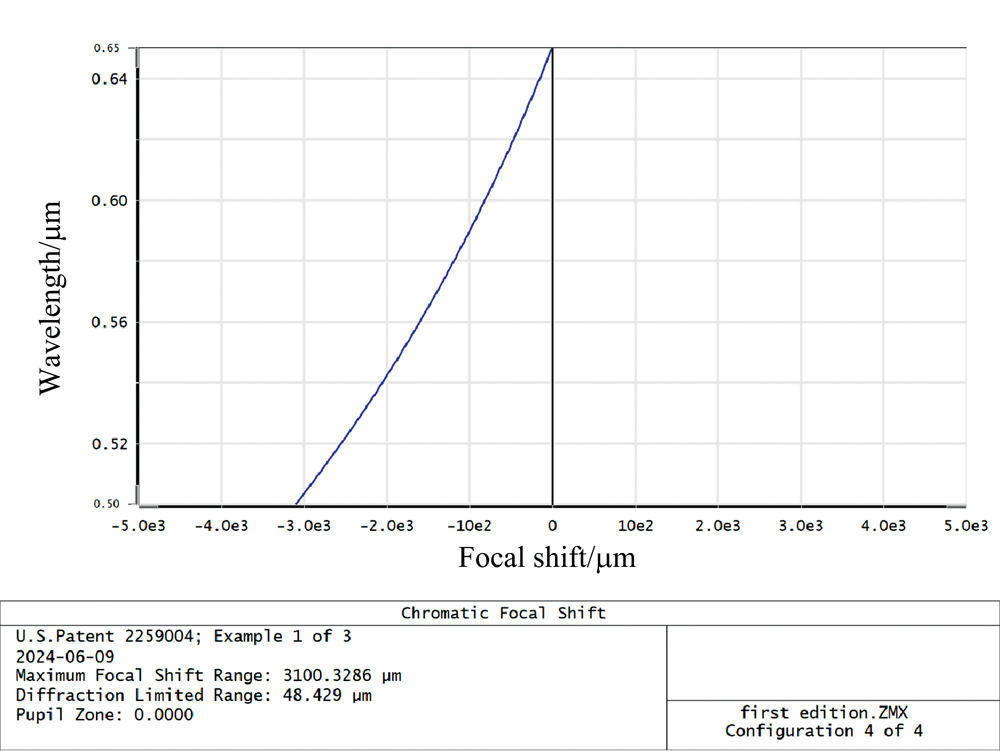 | 图4 色焦移图Fig.4 Color focal shift |
最终色散物镜色散特性参数设计结果为: 扫描线长为10.2 mm, 色散范围为3.1 mm, 各个波长的弥散斑直径均小于5.5 μ m。 光学设计参数结果为: 物方孔径0.1, 工作距离为56.87~60 mm, 放大倍率为0.85, 物方绝对远心, 像方远心在1° 以内, 物方视场为12 mm。 色散物镜色散特性参数设计结果均达到上述设计目标要求。
成像光谱仪可以获得待检测目标的单色光谱像, 并将空间维信息和光谱信息结合成三维待测目标立方体数据, 从而为研究人员提供了探测目标空间维以及光谱维的特征细节[17], 目前已经在各个领域广泛应用[18, 19, 20]。 光谱仪一般都有准直镜, 分光元件, 聚焦镜和探测器组成。 采取准直镜和聚焦镜为完全对称的结构, 这样可以抵消部分像差, 简化光学设计过程。 常用的分光元件有光栅和棱镜。 棱镜分光与材料折射率和顶角角度有关[21], 棱镜材料对不同的波长有不同的折射率, 在棱镜的楔角α 确定的情况下, 一束光的出射偏向角θ 与入射角i的关系可以表示为
当入射角不变时, 偏向角是折射率n的函数, 所以不同波长的偏向角会不同, 从而将不同波长的光分开。 棱镜分光的缺点是棱镜色散非均一且色散率低。
相对棱镜而言, 光栅的光谱分辨率高, 光谱范围宽且色散均一。 光栅又分为透射光栅和反射光栅, 透射光栅受限于光栅制作材料的透射光谱特性, 使用时光谱范围受到限制, 且光能利用率较低, 因此选择反射光栅作为分光元件。
该系统的结构原理图如图5所示, 分光元件首先通过准直镜使狭缝发出的光准直射入到光栅上, 光栅负责将该波段的波长在色散方向上分开, 经聚焦镜成像在探测器接收面。 探测器部分负责接收和显示该波段的光谱信息。
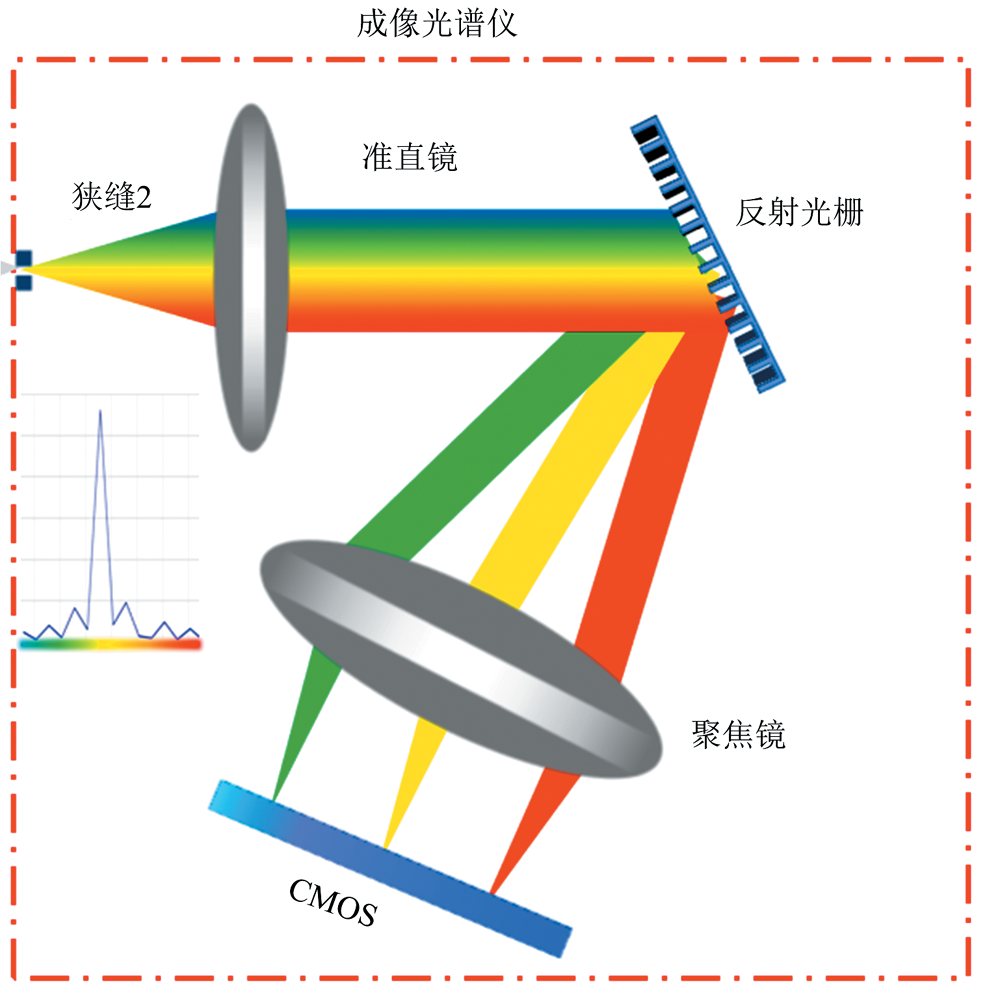 | 图5 成像光谱仪原理图Fig.5 Schematic diagram of imaging spectrometer |
成像光谱仪的光谱分辨率由系统的设计指标决定, 若该光谱共焦线扫式测量系统的位移分辨率为δ L, 工作的波段范围使Δ λ , 系统的测量范围使Δ L, 则该成像光谱仪需要达到的光谱分辨率为
测量范围设计目标为3 mm, 工作波段为500~650 nm, 位移分辨率为0.8 μ m, 代入式(5)可得该成像光谱仪需要的光谱分辨率至少为0.04 nm。
成像光谱仪工作波段要包含色散物镜的工作波段, 所以设计其工作波段为490~660 nm, 中心波长为575 nm。 光谱分辨率主要由准直镜和聚焦镜的焦距和孔径决定。 准直镜的焦距f1与分辨率之间满足
式(6)中, a为狭缝宽度, n为光栅刻线密度。
聚焦镜的焦距f2应满足
式(7)中, γ 为探测器与垂直方向的夹角, h为探测器像面长度, n为光栅刻线密度。
目前在可见光波段常用的光栅刻线数为1 200和600线· mm-1。 根据所需光谱分辨率以及整体结构布局, 确定光栅参数如表3所示。
| 表3 成像光谱仪设计参数 Table 3 Parameters of the imaging spectrometer |
上面阐述了光栅光谱仪的一些基本原理以及各部件的设计, 按照上述参数设置成像光谱仪并在软件中对光路进行优化设计。 优化结果如图6所示。
 | 图6 成像光谱仪结构优化结果Fig.6 Optimized structure of imaging spectrometer |
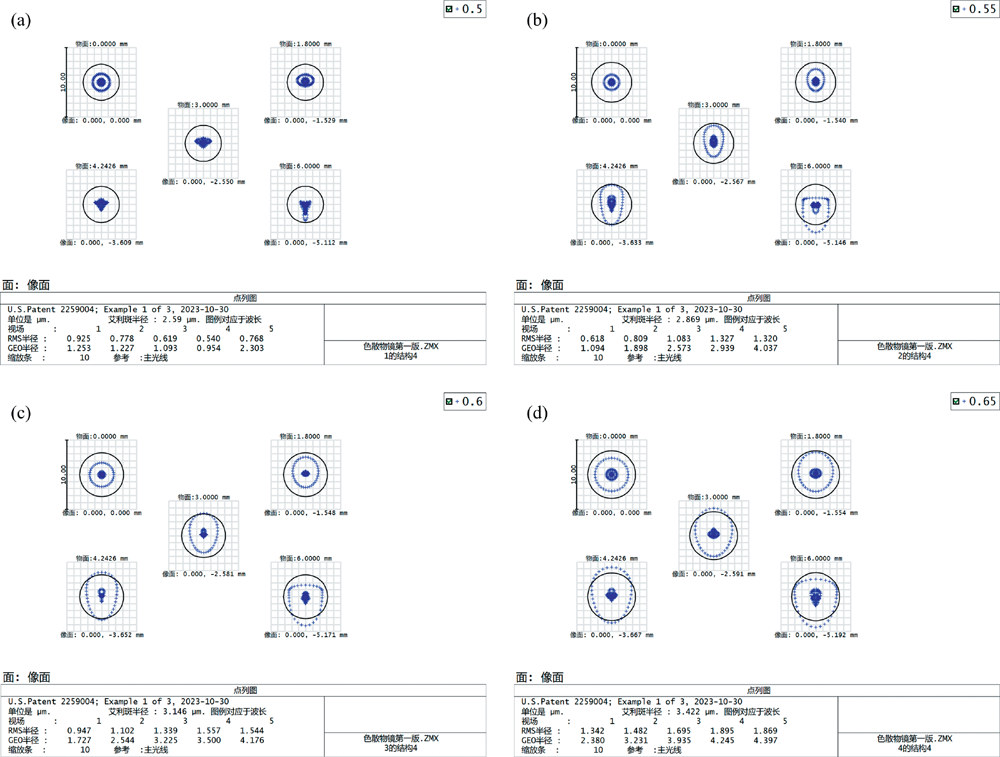
成像光谱仪的成像质量评价仍然选用点列图作为评价标准, 要求弥散斑直径一个像元大小, 如图7为四个采样波段500、 550、 600和650 nm的点列图情况。
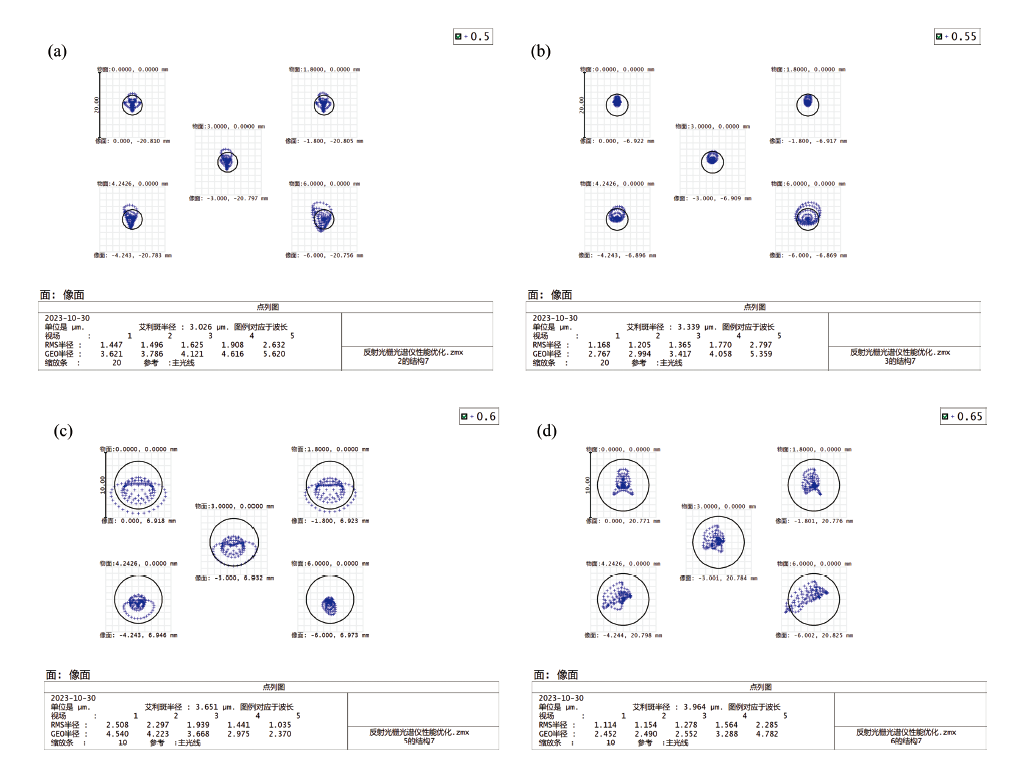 | 图7 点列图 (a): 500 nm点列图; (b): 550 nm点列图; (c): 600 nm点列图; (d): 650 nm点列图Fig.7 Spot diagram (a): 500 nm spot diagram; (b): 550 nm spot diagram; (c): 600 nm spot diagram; (d): 650 nm spot diagram |
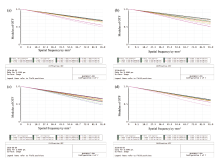
光学传递函数, 即MTF曲线, 是反映不同物体不同频率成分传递能力。 MTF曲线是评价光学成像系统的最系统的方法。 本成像光谱仪选用的探测器像元大小为5.5 μ m, 对应的奈奎斯特截止频率为=1/(5.5(μ m)× 2)=91 lp· mm-1, 图8所示为中心波长处MTF调制函数曲线, 可以看出在截止频率处仍大于0.5, 接近衍射极限, 满足成像质量要求。
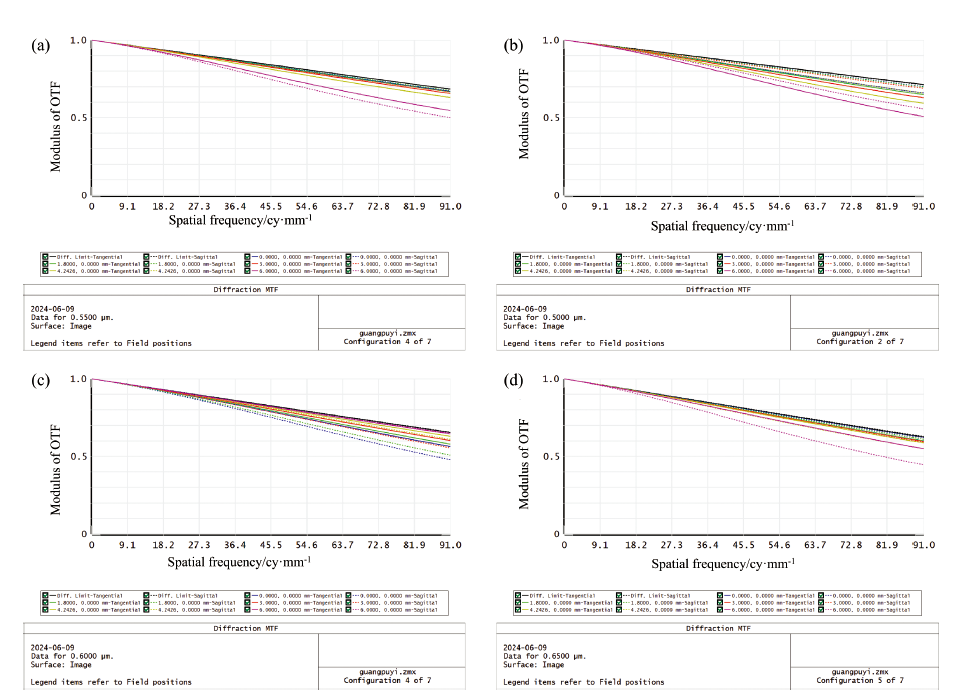 | 图8 光学传递函数MTF图 (a): 500 nm处MTF曲线; (b): 550 nm处MTF曲线; (c); 600 nm处MTF曲线; (d): 650 nm处MTF曲线Fig.8 MTF diagram of optical transfer function (a): MTF curve at 500 nm; (b): MTF curve at 550 nm; (c): MTF curve at 600 nm; (d): MTF curve at 600 nm |
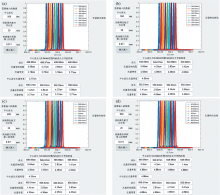
zemax无法读出光谱仪分辨率确切数值, 需要根据光谱仪分辨率的理论公式从zemax软件中读取所需要的数据, 再使用matlab软件进行仿真, 才能得到光谱仪分辨率的数值大小, 理论公式[22]如式(8)
式(8)中, x代表卷积, a代表狭缝宽度, 两个矩形函数分别对应狭缝函数和探测器函数, y代表了像面坐标。 LSF(y)代表了位置处的线扩散函数, 通过相同y坐标的点扩散函数对狭缝长度方向积分获得。 通过编写宏语言指令, 从zemax软件中读取点扩散函数, 不同波长在像面的位置等数据, 通过matlab仿真得到光谱分辨率结果, 如图9所示, 可以看出在距离四个中心波长0.04 nm带宽的波长分开的距离均在一个像元的大小, 说明该成像光谱仪的分辨率达到0.04 nm。
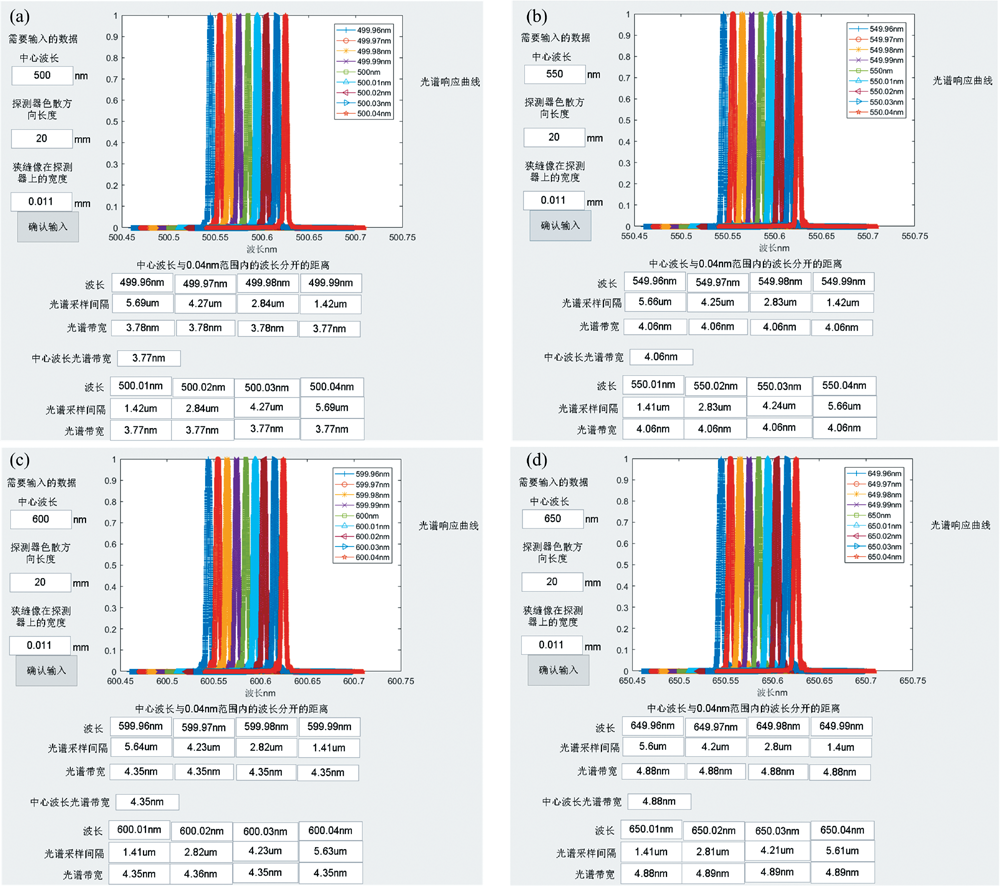 | 图9 光谱仪分辨率仿真图 (a): 500 nm处光谱响应函数曲线; (b): 550 nm处光谱响应函数曲线; (c): 600 nm处光谱响应函数曲线; (d): 650 nm处光谱响应函数曲线Fig.9 Spectrometer resolution simulation (a): Spectral response function curve at 500 nm; (b): Spectral response function curve at 550 nm; (c): Spectral response function curve at 600 nm; (d): Spectral response function curve at 650 nm |
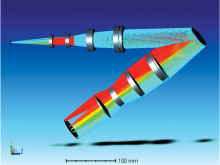
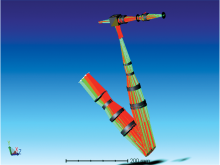
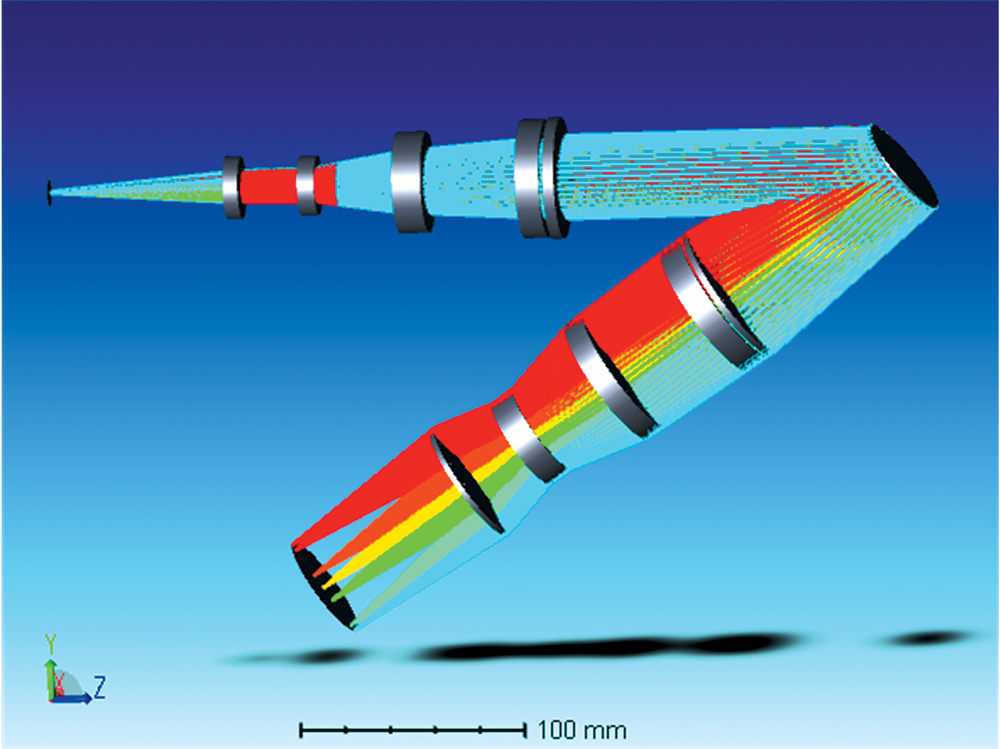
整个系统是由色散物镜与成像光谱仪两部分组合而成, 中间的分束棱镜会使从被测物表面返回来的光线进入成像光谱仪。 成像光谱仪再将入射光经过准直, 分光后再经聚焦镜会聚到探测器接受面上, 光谱共焦线扫式位移测量系统整体光路图如图10所示。
 | 图10 光谱共焦线扫式测量全系统结构图Fig.10 Line-scanning confocal spectral meaurement system |
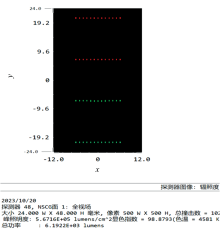
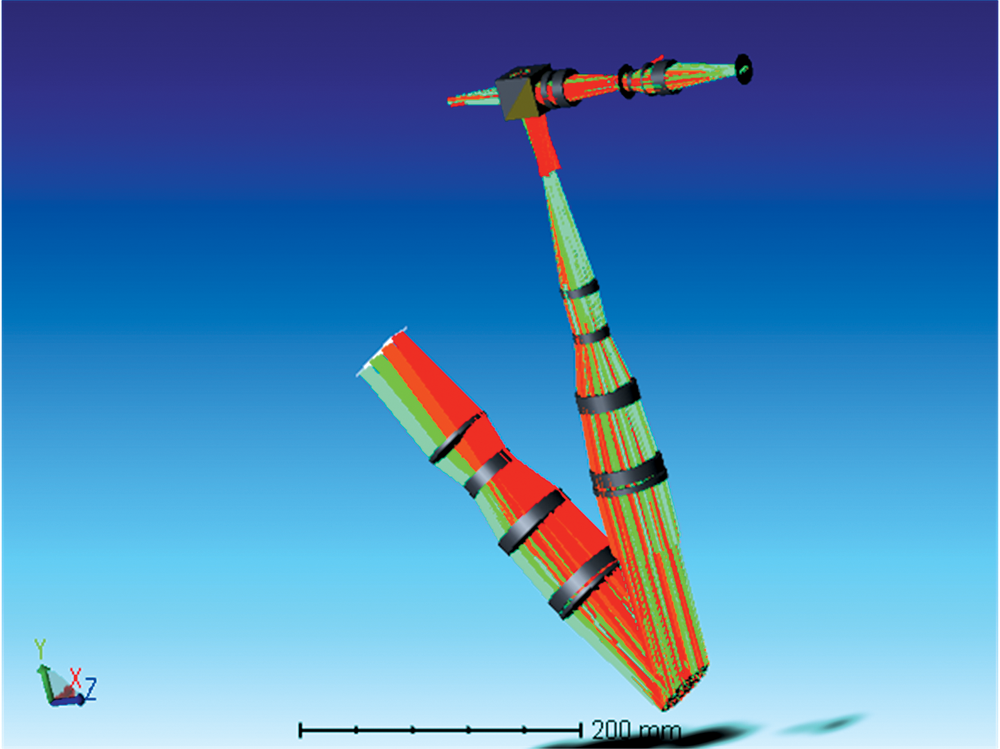
根据该系统原理分析, 聚焦到被测目标表面的光线才能通过接收狭缝到达探测器, 在zemax非序列模式下, 针对500、 550、 600和650 nm四个波长进行追迹, 上述四个波长在被测物表面聚焦时的光迹图如图11所示。
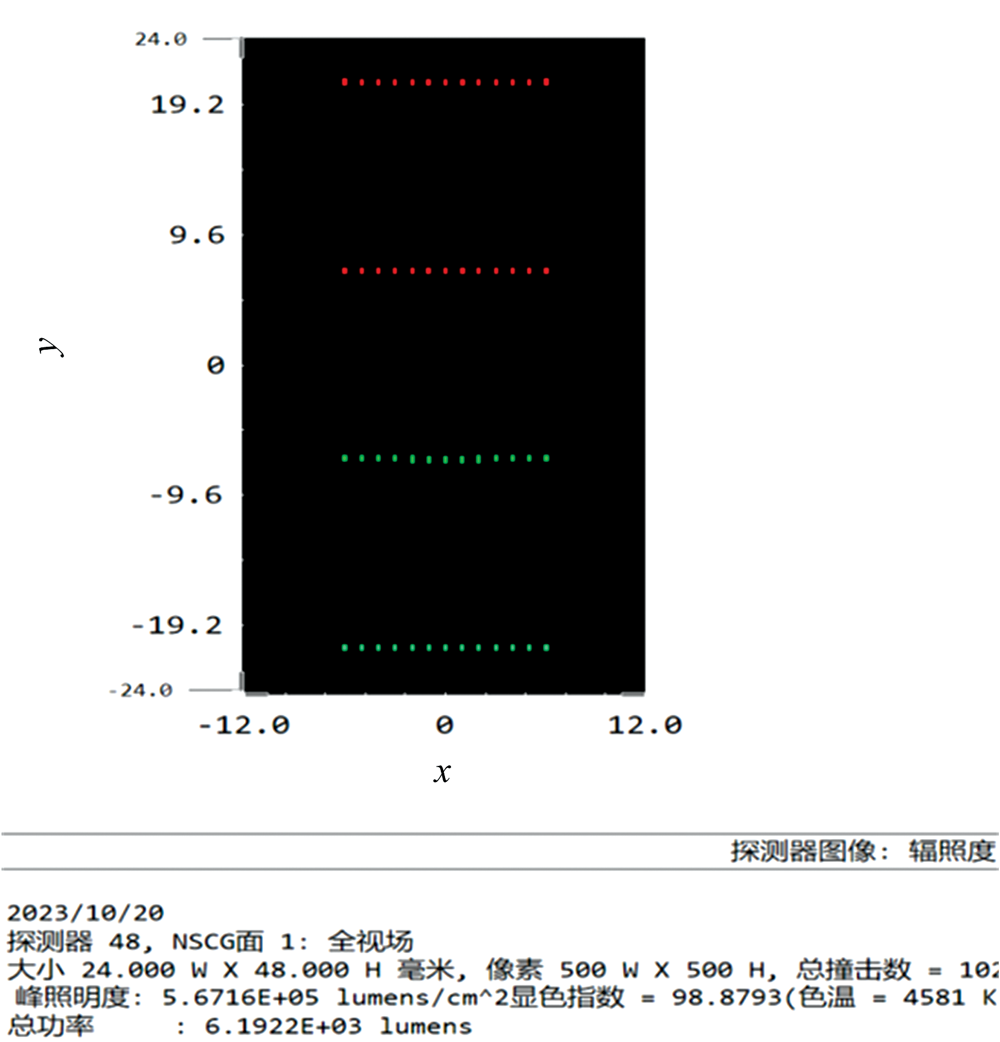 | 图11 光谱共焦线扫式测量系统整体光迹图Fig.11 Overall ray tracing of the line-scanning confocal spectral measurement system |
全系统成像质量由探测器面上的光斑半径决定。 在zemax非序列模式下经光线追迹后在探测器面上可以获得光斑RMS半径值。 在工作波段500~650 nm范围内, 由探测器面上数据可知, 成像光斑半径均小于一个像元大小, 故成像质量满足要求。
由上述设计可知, 色散物镜色散范围为3 mm, 光谱仪光谱分辨率达到0.04 nm, 工作波段范围为500~650 nm, 代入式(5)可知位移分辨率至少为0.8 μ m。
根据光谱共焦原理, 对高精度线扫式的光谱共焦位移传感器的光学系统进行设计, 主要工作内容为系统理论分析与验证, 光学系统设计和全系统分析, 具体工作内容为:
(1)本文对色散物镜进行了理论分析和仿真, 提出了一种线扫式色散物镜的设计方法, 通过对双高斯的初始结构的优化, 对轴向色差进行控制, 同时尽可能减少球差, 慧差, 像散以及场曲的影响, 设计出了一款色散物镜, 获得3 mm的色散范围以及10 mm的扫描线长。
(2)针对国内现阶段多研究色散物镜, 而对所适配的成像光谱仪的研究较少的现状, 本文根据所设计全系统的技术指标, 对成像光谱仪进行理论分析, 通过zemax软件对成像光谱仪进行光学设计, 在matlab里进行光谱仪光谱分辨率的仿真, 结果表明该成像光谱仪系统实现了0.04 nm分辨率。
(3)设计结果表明该光谱共焦线扫式位移测量系统在3 mm的测量范围内, 可以实现0.8 μ m的分辨率。
综上所述, 本文分析并设计了一种高精度的线扫式光谱共焦位移传感系统, 该系统相较于点扫式光谱共焦位移传感技系统减少了大量的后端数据处理工作, 满足了高精度, 高速的三维面型测量任务, 并且对研制高精度线扫式光谱共焦位移传感器原理样机提供了理论支撑。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|