







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
船舶污染气体排放的成像光谱追踪探测
[任昊1  , 曾议
, 曾议2, * , 鲁晓峰2 , 毋路遥2 , 董健2 , 李浩然2 , 宋润泽2 , 韩云坤2 , 奚亮2 , 司福祺2 ]
, 曾议, 鲁晓峰|
|


作者简介: 任 昊, 1997年生, 合肥大学生物食品与环境学院硕士研究生 e-mail: 1016528922@qq.com
船舶运输促进了贸易和物流的发展, 同时也向大气中排放了污染物。 开发了一套地基快速成像光谱探测系统, 旨在对船舶尾气进行实时追踪和监控。 该系统同时采用可见光和紫外望远镜头, 可见光与云台协同工作负责定位和追踪目标船舶, 紫外望远镜负责采集船舶排放气体的特定光谱数据。 根据船舶实时位置调整摄像头指向, 并连续拍摄多幅图像, 建立时间序列上的背景及光谱数据集。 对光纤光谱仪进行改进, 提高了系统光谱成像速度, 能获得高时间分辨率的监测数据, 同时能够适应船舶移动和环境变化, 保障了数据的准确和连续。 借助成像差分吸收光谱技术, 可以识别和量化船舶尾气中的SO2和NO2浓度。 为验证系统性能, 进行样气浓度测量实验, 结果相对误差均在7%以内。 与推扫式地基IDOAS仪器进行了对比观测实验, 两者测量结果最高值相差约2%。 对铜陵市长江流域的船舶污染气体排放进行了实地观测。 结果表明, 船舶尾气中SO2斜柱浓度最大为5.64×1016 molecule·cm-2, NO2斜柱浓度最大为8.75×1016 molecule·cm-2, 验证了探测系统的可行性。
, ZENG Yi, LU Xiao-fengShip transportation has promoted the development of trade and logistics while also emitting pollutants into the atmosphere. This study developed a ground-based rapid imaging spectral detection system for tracking and monitoring real-time ship emissions. The system uses both visible light and ultraviolet telescopic lenses. The former works with the gimbal to locate and track target ships, while the latter collects specific spectral data of ship emissions. Adjusting the camera orientation based on the ship's real-time position, and continuously capturing multiple images to establish a time series background and spectral dataset. Improvements have been made to the fiber optic spectrometer, which improves the system's spectral imaging speed and enables the acquisition of high temporal resolution monitoring data. At the same time, it can adapt to ship movements and environmental changes, ensuring the accuracy and continuity of data. Using imaging differential absorption spectroscopy technology, the concentrations of SO2 and NO2 in ship emissions can be identified and quantified. Field observations were conducted on ship pollution gas emissions in the Yangtze River Basin of Tongling City to verify the system performance. The results showed that the inclined column density of SO2 in ship emissions was 5.64×1016 molecule·cm-2, and the inclined column density of NO2 was 8.75×1016 molecule·cm-2, which verified the feasibility of the detection system.
全球化进程加速, 船舶运输作为重要的物流方式, 对于促进全球贸易起着重要作用。 船舶运输在带来经济效益的同时, 排放的大量污染物也对环境造成了不容忽视的影响。 这些污染物不仅恶化了港口城市和内河区域的空气质量, 对全球气候、 生态系统和人类健康构成了潜在威胁。 开展针对船舶大气污染排放的监测研究显得尤为迫切。 根据《中国移动源环境管理年报(2023)》的数据, 2022年非道路移动源排放二氧化硫为17.6万吨, 船舶排放的主要污染物还包括碳氢化合物(10.3万吨)、 氮氧化物(153.9万吨)和颗粒物(6.1万吨), 其中氮氧化物和二氧化硫的排放尤为显著。 随着船舶排放问题受到越来越多关注, 为了应对这一挑战, 包括中国在内的许多国家已经设立了船舶排放控制区(SECAs), 在这些区域内对船舶使用的燃料和排放的污染物进行严格限制。 同时, 国内外相关机构也在积极开展船舶大气污染物的监测研究, 以更好地理解和控制船舶排放对环境和人类健康的影响。
André Seyler及其团队在Neuwerk岛部署了MAX-DOAS仪器, 用于监测通往Hamburg航道船舶排放的大气有害物质, 有效地展示了航道上方由船舶尾气形成的污染羽流, 描绘出周边区域NO2的浓度分布状况[1]。 Kai Krause等采用LP-DOAS技术, 对Elbe河主要航线上的船舶进行了为期一年的深入观测, 测量其排放的SO2和NO2, 得出了单艘船舶排放空气污染物的排放率[2]。 在后续研究中, Kai Krause等进一步创新, 将自动识别系统和高斯烟羽模型相结合, 在DURH和NERH测量站测量了莱茵河航道上的船舶排放物, 通过分析测到氮氧化物时间序列中的峰值, 成功推导出绝对排放率[3]。 刘义铭等将DOAS技术与船舶尾气实时排放模型相结合, 在上海吴淞口航道水域对特定船只排放的污染气体进行了监测, 成功反算出船舶燃油硫含量[4]。 陈命男等采用LP-DOAS技术, 针对黄浦江下游航道区域, 细致监测了过往船舶尾气的排放, 并深入探究了人类活动强度如何影响该区域污染物的浓度水平[5]。 船舶尾气因水域上空排放特性, 监测与控制难度较地面汽车和工业排放更大。 实现对船舶排放的有效监测, 对制定和实施针对性的治理措施, 具有至关重要的数据支持作用。
成像差分吸收光谱(imaging differential optical absorption spectroscopy, IDOAS)是一种被动光源测量技术, 具有高分辨率、 非接触式测量和实时监测的优势, 该技术能够高效地捕捉大气污染气体的二维空间浓度分布数据[6, 8]。 传统的地基IDOAS仪器主要对静态分布的点源污染进行观测和分析。 在实际应用中许多污染源具有移动性, 如船舶、 飞机等, 这些移动源产生的污染物会随其运动而扩散。 传统IDOAS仪器受限于定点观测模式, 无法灵活追踪船舶等移动源, 在一定程度上限制了其在船舶尾气污染物排放监管中的应用[7]。 监管部门当前依赖的登船取样、 送检机构及便携式快检仪器等方法, 尽管各有作用, 但普遍存在检测效率低下、 流程复杂耗时、 难以即时锁定超标排放源等弊端, 进而影响了监管效率和执法效果。 为了有效监测和评估移动源污染, 需要发展一种能够追踪移动源的技术。
为了快速有效地监测移动点源排放的污染物, 本研究在前期IDOAS基础上进行改进, 对船舶污染物排放的追踪监测展开研究。 该方法对光纤光谱仪做了拓展, 提高了光谱成像速度, 并将图像处理技术与光谱成像遥测相结合, 开发了带有追踪功能的云台系统, 能实时捕获观测区域内多幅连续时间序列上的空间图像信息, 光谱遥测技术可以捕获观测区域内同一时间点的污染物浓度数据。 结合这些空间信息与污染物浓度数据, 能够动态追踪并绘制出船舶大气污染物的排放轨迹及其二维分布图。
2024年1月16日— 17日, 在铜陵市长江某码头进行了外场实验, 专注于监测内河船舶排放的烟羽情况。 系统地整理了实验数据, 进行了全面深入的综合分析, 得到了船舶排放大气污染物的动态信息, 验证了带追踪功能的改进IDOAS系统在船舶污染气体排放监测中的可行性。
图1为自动追踪快速IDOAS船舶排放监测系统。 系统由控制模块(笔记本电脑、 二次电源)、 光谱仪模块(带温控的成像差分吸收光谱仪、 CCD面阵探测器)、 光学导入模块(紫外镜头、 多芯光纤束)、 云台系统(二维旋转云台、 摄像头)组成, 系统组成示意如图1(a)所示, 实物如图1(b)所示。
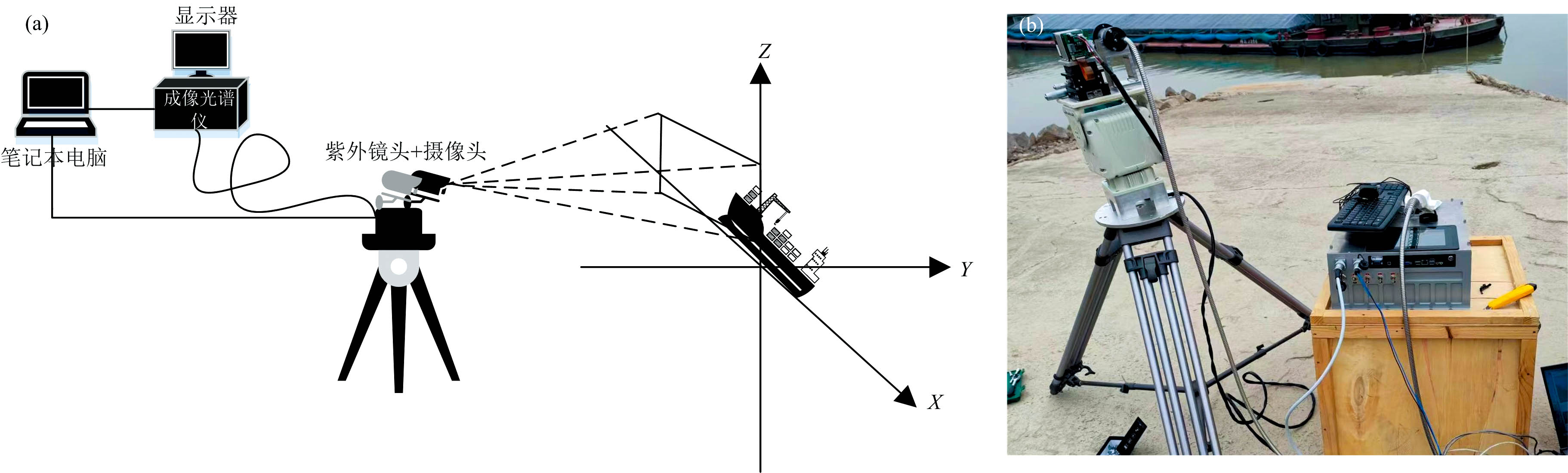 | 图1 自动追踪快速IDOAS系统 (a): 系统测量示意图; (b): 系统实物图Fig.1 Ground-based fast IDOAS system (a): System measurement diagram; (b): System physical diagram |
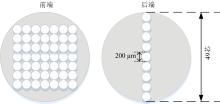
本系统中, 光学导入模块由紫外镜头与一束多芯光纤构成。 光纤束设计如图2所示, 内含49根无源石英光纤核心, 这些光纤前端与紫外镜头实现了精密对接, 确保了光信号的稳定传输。 光纤芯的排列采用了7× 7的矩形阵列布局, 从上到下, 从左至右顺序布置。 光纤束的尾端则与光谱仪连接, 并采取直线顺序排列, 由于采用了这种独特的布局设计, 系统无需采用推扫的扫描方式, 而是能够通过类似摄影的方式直接捕捉图像, 实现快速光谱成像。
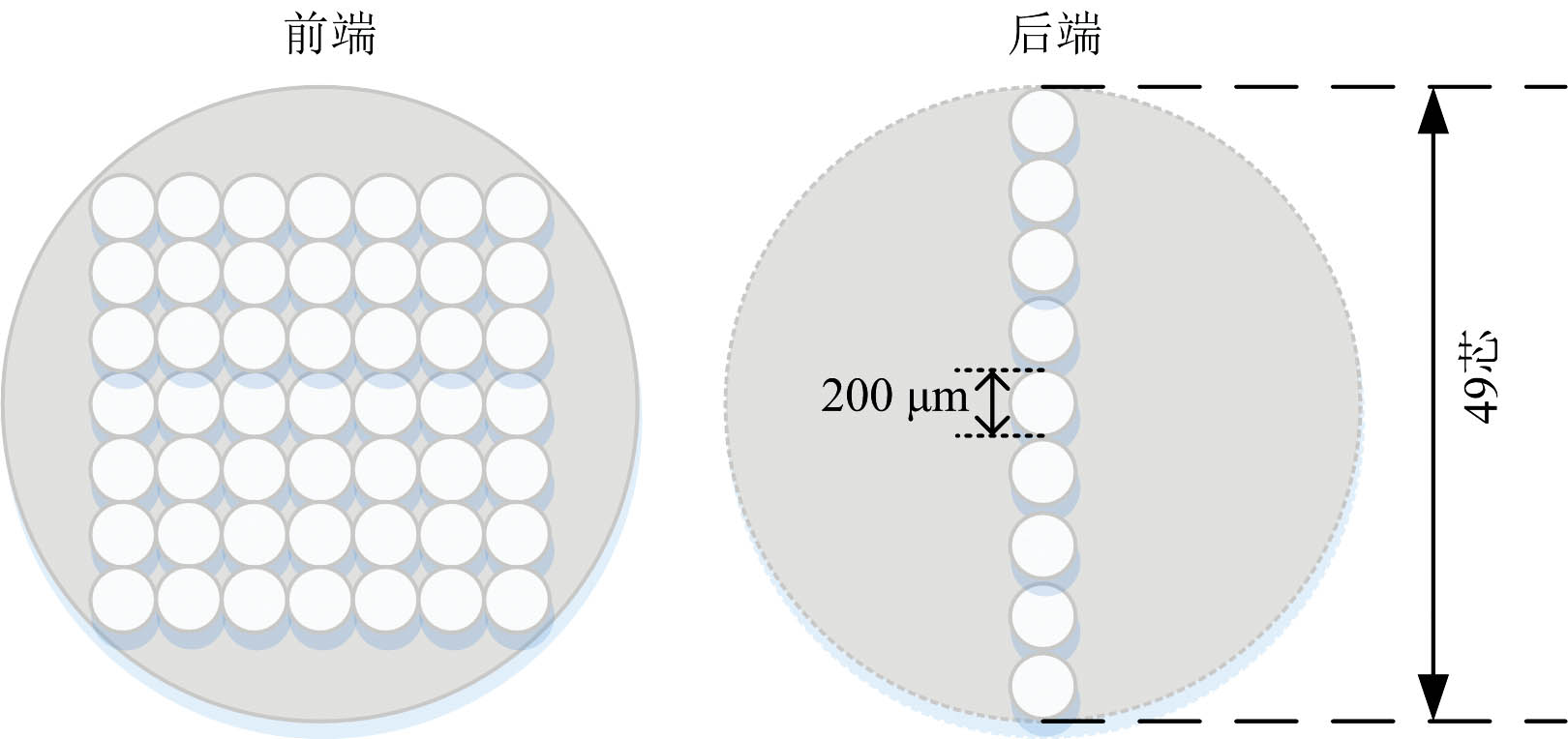 | 图2 光纤束设计图Fig.2 Fiber bundle design diagram |
紫外镜头收集太阳散射光, 该光信号随后通过光纤束引导至入射狭缝。 在通过光栅时, 光发生色散现象后投射到面阵CCD上。 面阵CCD进行光电转换, 并传输给计算机。 经过光谱数据反演, 得到相应的气体斜柱浓度。 云台上搭载一个可见摄像头和一个紫外摄像头, 可以识别并追踪视场内的船舶, 同时获取背景及光谱信息, 二者相结合可以追踪船舶尾气浓度的二维分布。 系统具体参数如表1所示。
| 表1 IDOAS系统参数 Table 1 IDOAS system parameters |
云台具备目标识别和自动追踪功能, 使其能够准确识别视场内的船舶并自动定位至指定监测位置。 一旦选定视场内的特定船舶, 通过云台的精确转动, 系统将智能地追踪其在水域中的移动, 并确保船舶始终在画面右下角, 实现对特定船舶的持续监控。
实际操作中, 系统可以识别视场内的所有船舶, 从众多船只中选择一条特定的船舶进行追踪。 通过云台与可见光摄像头定位并追踪目标船舶, 云台根据船舶的实时位置信息调整摄像头指向, 并随其连续转动, 摄像头能够对船舶进行连续拍摄, 捕获一系列时间序列上的船舶照片, 这些照片不仅呈现出船舶的动态变化, 还能为后续的船舶行为分析提供宝贵的资料。 在云台上搭载了紫外摄像头。 在追踪拍摄的同时, 紫外摄像头会同步采集每幅图像所对应的光谱数据。 这些紫外光谱数据为船舶尾气的进一步分析和研究提供了关键信息。
为了获得准确的船舶尾气空间二维浓度分布信息, 需要调整摄像头视场以确保可见摄像头视场完全覆盖紫外镜头视场, 摄像头的水平视角为57.6° , 紫外镜头水平视角为5.5° , 仪器架设位置距离污染源最短距离为7.2 m。 图3(a)为示意图, 图3(b)为两者实际捕获的图像, 其中的白色框为紫外镜头视场。
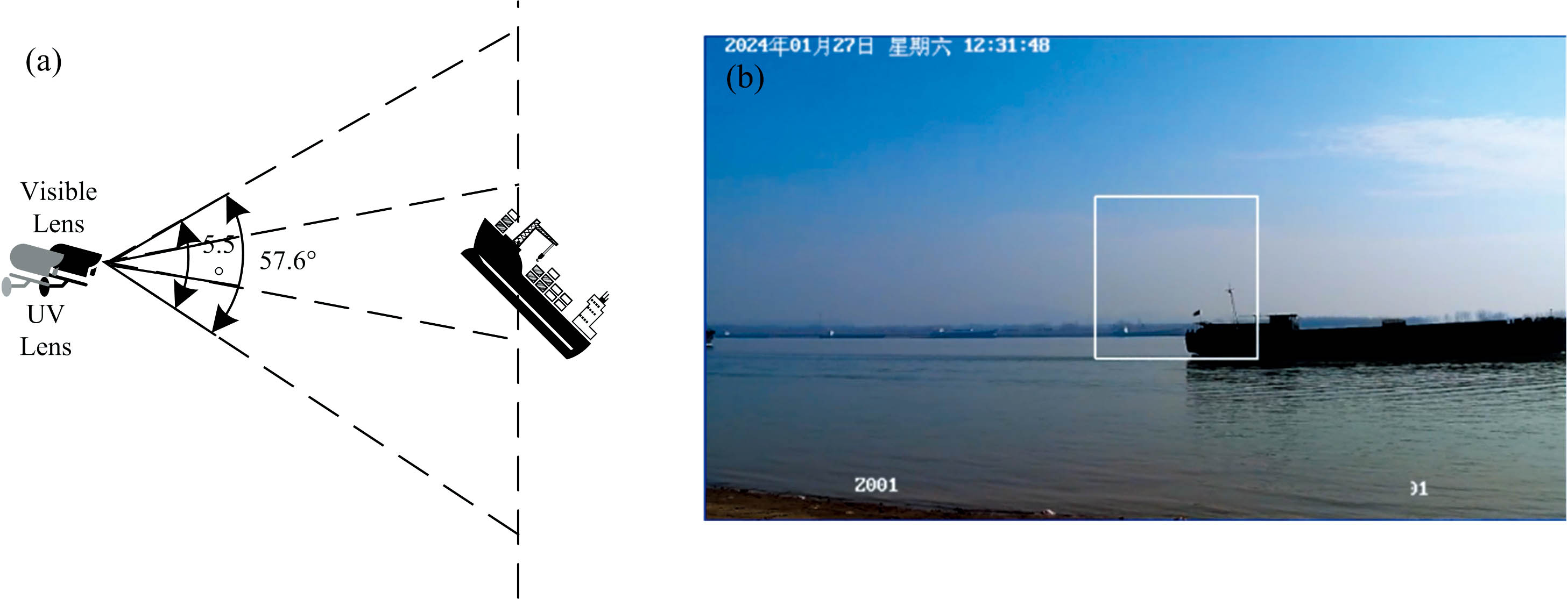 | 图3 系统视场图 (a): 系统视场图; (b): 紫外、 摄像头视场匹配示意图Fig.3 System field of view (a): System field of view; (b): UV and camera field of view matching schematic diagram |
本研究运用了差分吸收光谱技术处理采集到的光谱数据, 数据处理流程如图4所示。
 | 图4 数据处理流程图Fig.4 Data processing flowchart |
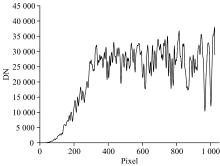
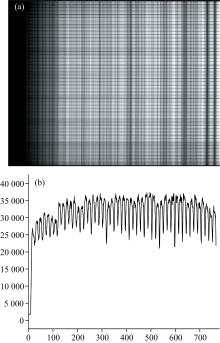
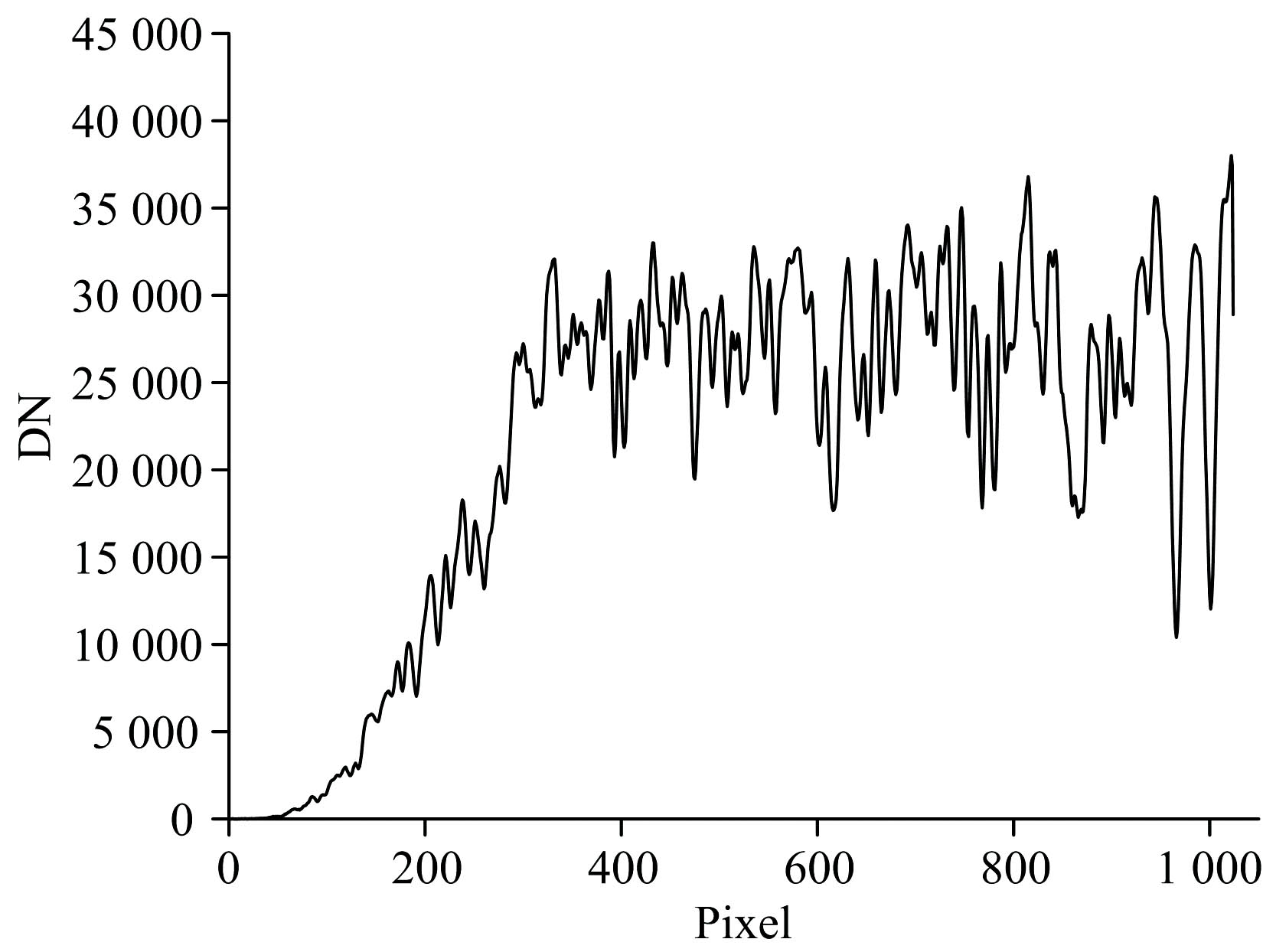
图5(a)为系统在外场测试期间采集的太阳散射光谱图像。 由于采用了多条光纤传输, 所检测到的图像呈现明显的网格状特征。 图5(b)为沿纵向的光强度分布情况。 在原始图像中, 明暗条纹相分离。 通过数据预处理步骤, 在空间维度上, 对亮色条纹进行了合并处理, 并剔除了暗色条纹的干扰。 图6为经过处理后第二十五根光纤的光谱分布图。
 | 图5 面阵CCD图 (a): 原始光谱图像; (b): 纵向光强分布图Fig.5 Array CCD image (a): Spectral image; (b): Longitudinal light intensity distribution map |
 | 图6 第25根光纤光谱图Fig.6 Spectral diagram of the 25th optical fiber |
在光谱分析中, 为了实现测量光谱、 参考光谱和吸收截面之间的准确配准, 首先在实验室利用汞灯对光谱仪进行波长— 像元的精确校正, 如图7(a)所示。 将此次校正作为初始值参与到迭代拟合过程中, 最终收敛得到最佳解, 图7(b)为对第25根光纤进行校准后的结果。
 | 图7 波长校准 (a): 波长-像元; (b): 波长校正Fig.7 Wavelength calibration (a): Wavelength pixel; (b): Wavelength calibration |
为了确保船舶烟羽中污染气体浓度反演的准确性, 选择在无云天气下测得的天顶太阳散射光光谱作为“ 洁净” 的参考光谱。 这一步骤有助于消除夫琅禾费线(Fraunhofer)对结果的潜在干扰。 将仪器狭缝函数与气体的高分辨率吸收截面进行卷积处理, 以便与仪器的分辨率相匹配。 在光谱拟合过程中, Ring效应当作一个关键的吸收截面考虑在内。 通过五阶多项式拟合, 去除由米散射和瑞利散射引起的宽带光谱结构。 分析时主要对SO2和NO2这两种气体进行反演。 为了精确测量船舶排放的SO2浓度, 选定308~320 nm具有显著吸收特征的波长范围; 对NO2测定, 选择338~370 nm的波长区间。 这些选择能够有效获得SO2和NO2的斜柱浓度数据。 编写Python程序实现了反演全过程的自动化。 详细的参数设置见表2。
| 表2 DOAS反演参数设置 Table 2 DOAS inversion parameter settings |
仪器搭建工作完成, 即进行样气测试, 以验证快速成像差分吸收光谱系统在气体浓度测量方面的准确性。 测试对象包括不同浓度的SO2和NO2气体。 实验前, 先通入氮气清洗样气池, 消除干扰。 采用氙灯作为光源, 通过样气发生装置稀释气体并控制气体流速, 将不同浓度的气体通入长度为50 cm的吸收池。 每组样气通气五分钟后开始测量, 确保浓度稳定。 连续三次测量后, 使用光谱仪记录光谱信息并存储于电脑。 运用朗伯-比尔定理计算积分浓度, 并通过理想气体方程转化为体积浓度, 获取准确数据。
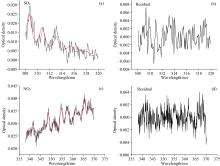
图8(a— d)分别为成像DOAS光谱反演结果, 图中黑色实线表示实测光谱数据, 红色实线为拟合结果。 SO2样气浓度为6.03× 1016 molecule· cm-2, NO2样气浓度为9.05× 1016 molecule· cm-2。 反演得到SO2斜柱浓度为6.4× 1016 molecule· cm-2, 反演残差为2.4× 10-3, NO2斜柱浓度为9.54× 1016 molecule· cm-2, 反演残差为1.3× 10-3, 表明光谱拟合效果良好。
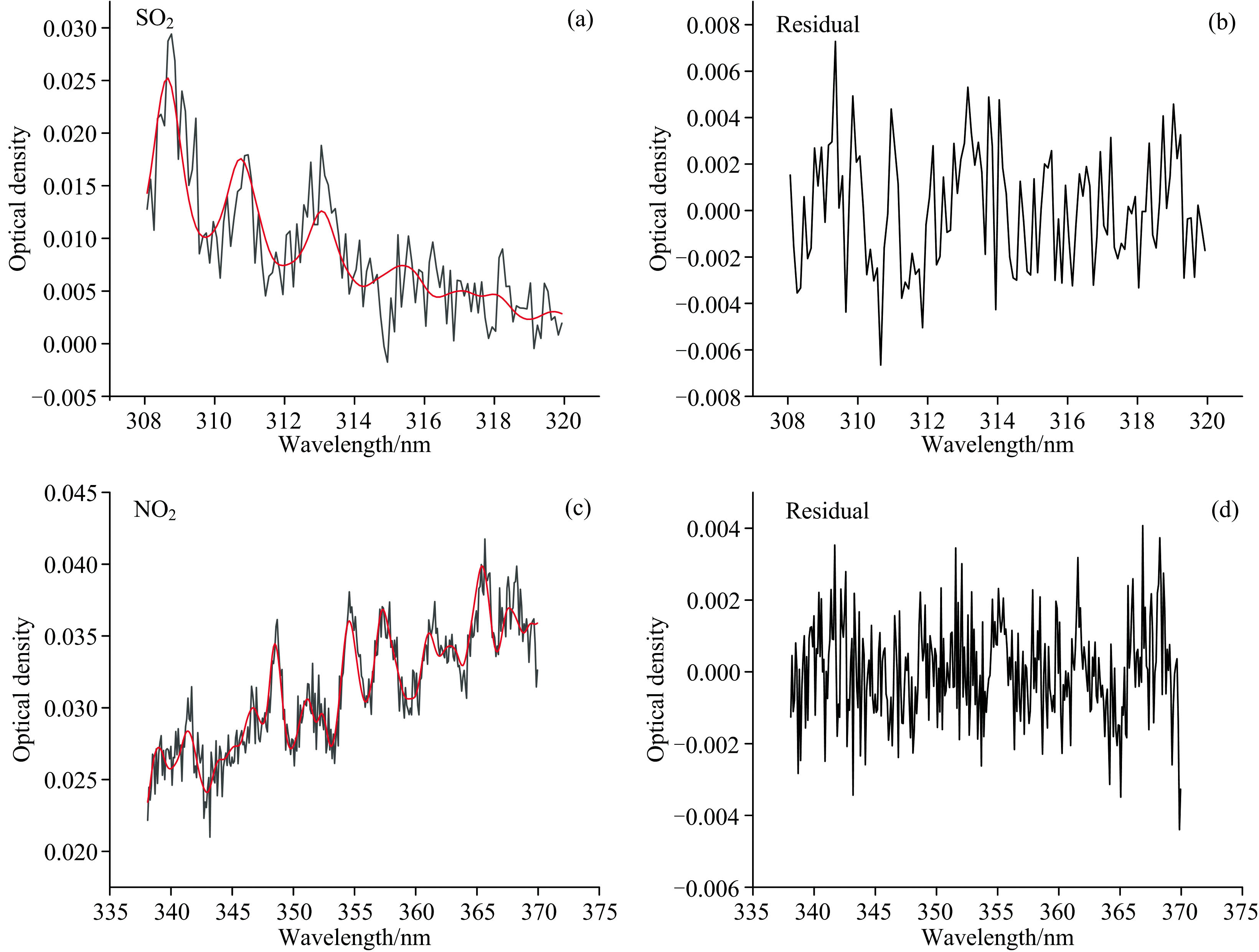 | 图8 成像DOAS光谱反演结果示例 (a): SO2光谱拟合结果; (b): SO2斜柱浓度拟合残差; (c): NO2斜光谱拟合结果; (d): NO2柱浓度拟合残差Fig.8 Example of imaging DOAS spectral inversion results (a): SO2 spectral fitting results; (b): SO2 oblique column concentration fitting residuals; (c): NO2 spectral fitting results; (d): NO2 oblique column concentration fitting residuals |
样气测试涵盖多个浓度SO2与NO2样本, 采用图9设备测试, 样气测试结果见表3, 所有测量相对误差均未超过7%。 证明系统能够较为准确地获得气体的浓度。
 | 图9 样气测试仪器图Fig.9 Sample gas testing instrument diagram |
| 表3 SO2样气实验结果 Table 3 Results of SO2 Sample Gas Experiment |
为了进一步验证仪器的准确性, 携带本系统与推扫式地基IDOAS仪器在铜陵市工业园区展开对比观测实验, 仪器的架设地点及周边环境如图10(a, b)所示, 仪器架设在电厂烟囱西南侧1.4 km处, 测量时间约为12:00。 两台仪器同时对电厂烟囱烟羽中的SO2进行成像测量。
 | 图10 观测示意图 (a): 观测区域; (b): 观测现场Fig.10 Schematic diagram of observation (a): Observation area; (b): Observation site |
仪器与对比实验仪器对电厂烟囱烟羽中SO2的空间二维分布成像结果如图11(a, b, c)所示, SO2斜柱浓度的高值位于烟羽中心区域, 本仪器SO2斜柱浓度最高值为8.4× 1016 molecule· cm-2, 对比仪器SO2斜柱浓度最高值为8.6× 1016 molecule· cm-2。 二者的观测结果差值平均约为4%。
 | 图11 电厂烟囱排放SO2反演结果 (a): 对比仪器; (b): 对比仪器烟羽部分; (c): 本仪器Fig.11 Inversion results of SO2 emissions from power plant chimneys (a): Comparison of instrument results; (b): Compare the results of the instrument plume section; (c): The instrument results in this article |
云台追踪功能设计, 使系统具有对船舶尾气追踪的功能。 为验证系统功能, 进行船舶尾气追踪实验。
2024年1月26日— 27日, 在铜陵市某码头, 搭建测量系统, 针对船舶污染进行观测实验, 实验地点为长江水域, 具体位于铜陵长江大桥以南约4 km处, 观测仪器安置于长江西岸, 与待测船舶的距离约为40 m。 测量时间约为12:00, 测量期间当地的风速为5~6 m· s-1。 为确保能垂直扫描烟羽, 将测量仪器安放在船舶北侧40 m的位置。 如图12(a, b)所示, 通过云台调整镜头, 使其抬升到一个特定角度— 仪器下边缘与水平线的夹角约为5° 。 这样的配置确保了整个烟羽均能被视场覆盖。 实验当天对船舶烟羽进行了多次测量, 扫描采集一幅图像的时间需要2 s, 获得高时空分辨率完整烟羽二维分布时间约为2 min, 在实际观测时, 因反演的数据繁多, 编写Python程序实现反演全过程自动化。 实验现场如图12(a, b)所示。
 | 图12 观测示意图 (a): 观测区域; (b): 观测现场Fig.12 Schematic diagram of observation (a): Observation area; (b): Observation site |
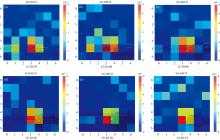
该成像系统具备2 s时间分辨率, 对一艘以标准航速(约2.88 m· s-1)行驶的船只, 完全通过观测区域大约耗时3 min。 本研究选取在航道内航行的代表性船只, 通过将光谱数据与同步获取的图像信息整合, 成功绘制了船舶排放SO2的空间二维分布图。 这些图像详细记录了在监测水域中特定船只排放尾气的轨迹, 选取其中六幅图像, 如图13(a— f)所示。
 | 图13 航道内典型船只尾气SO2追踪结果 (a): 12:28:07; (b): 12:28:40; (c): 12:29:06; (d): 12:29:36; (e): 12:30:10; (f): 12:30:55Fig.13 SO2 tracking results of typical ship exhaust gas in the waterway (a): 12:28:07; (b): 12:28:40; (c): 12:29:06; (d): 12:29:36; (e): 12:30:10; (f): 12:30:55 |
12:28:07时, 一艘船只进入了监测水域。 该监测系统迅速识别并开始追踪这艘船舶, 同时确保该船始终呈现在画面的右下角。 在整个观测过程中, 由于风速较低且风向与船舶航向相反, 船尾烟羽顺着船舶后方扩散。 从观测数据可以清晰地看出, 在船只尾部区域SO2浓度显著增高, 而在左下角较远处的一艘小型船只周围, 同样观察到较高的SO2浓度。 随着船只沿航道前进, 五个时间点所展示的船舶尾气浓度变化进一步证实了船舶尾部的气体浓度明显高于背景值。 在12:29:36, 船只接近监测点, 到了12:30:55, 船只逐渐驶出观测区域, 由这六幅图可以看出船舶排放的SO2浓度分布总体保持一致, 观测区域内的SO2浓度最高值为5.64× 1016 molecule· cm-2。
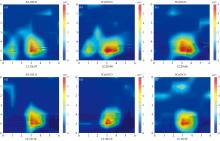
为了更直观地了解SO2浓度的变化, 采用线性插值方法对图像进行处理, 使观测结果更为明显。 经过处理的图像能够更清晰地揭示船舶尾部的SO2浓度变化。 六幅图像详细展现了对典型船只的追踪过程以及船舶尾部排放的SO2浓度, 呈现出了良好的一致性, 如图14(a— f)所示。
 | 图14 航道内典型船只尾气SO2追踪结果 (a): 12:28:07; (b): 12:28:40; (c): 12:29:06; (d): 12:29:36; (e): 12:30:10; (f): 12:30:55Fig.14 SO2 tracking results of typical ship exhaust gas in the waterway (a): 12:28:07; (b): 12:28:40; (c): 12:29:06; (d): 12:29:36; (e): 12:30:10; (f): 12:30:55 |
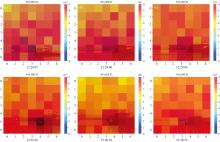
图15(a— f)详细展示了对目标船只的追踪过程, 以及船舶尾部排放的NO2浓度。 这些图像与上述SO2浓度观测相对应, 反映了同一艘船只在同一时刻NO2的浓度变化, 观测区域内的NO2浓度最高值达到8.75× 1016 molecule· cm-2。 通过对比分析, 从图像中清晰辨识出, 尽管所在区域的NO2背景浓度本身较高, 但是船舶尾部排放的NO2浓度显著超过了这一背景水平。 这种差异在图像中表现得比较明显, 不仅揭示了船舶尾气排放对局部环境的影响, 也展现了数据之间的一致性, 验证了观测方法的可行性。
 | 图15 航道内典型船只尾气NO2追踪结果 (a): 12:28:07; (b): 12:28:40; (c): 12:29:06; (d): 12:29:36; (e): 12:30:10; (f): 12:30:55Fig.15 NO2 tracking results of typical ship exhaust gas in the waterway (a): 12:28:07; (b): 12:28:40; (c): 12:29:06; (d): 12:29:36; (e): 12:30:10; (f): 12:30:55 |
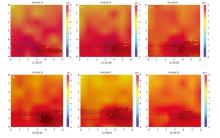
为了更直观地了解NO2浓度的变化情况, 采用线性插值方法对图像进行处理。 经过处理的图像能够更清晰地揭示船舶尾部排放的NO2浓度变化。 图16(a— f)详细展现了对典型船只的追踪过程以及船舶尾部排放的NO2浓度, 呈现出了良好的一致性。
 | 图16 航道内典型船只尾气NO2追踪结果 (a): 12:28:07; (b): 12:28:40; (c): 12:29:06; (d): 12:29:36; (e): 12:30:10; (f): 12:30:55Fig.16 NO2 tracking results of typical ship exhaust gas in the waterway (a): 12:28:07; (b): 12:28:40; (c): 12:29:06; (d): 12:29:36; (e): 12:30:10; (f): 12:30:55 |
研究了一种基于地基IDOAS 技术的遥测系统, 探索了该系统对船舶排放尾气进行追踪的方法。 本系统融合了云台定位追踪技术与紫外成像技术, 以实现对目标船舶尾气排放的准确监测。 云台追踪功能的加入赋予了系统卓越的机动性, 使其能够根据目标船舶的实时位置信息自动调整摄像头的指向, 确保对目标的持续稳定跟踪。 通过连续旋转拍摄, 系统采集了丰富的时间序列背景及光谱数据, 为后续分析奠定了坚实基础。
借助差分吸收光谱技术, 本系统能够根据收集到的时间序列光谱数据准确识别和量化船舶尾气中的SO2和NO2浓度。 不仅保证了气体成分浓度的准确分析, 也确保了检测的连续性。
将船舶尾气的浓度信息与其空间位置信息相匹配, 构建出船舶尾气污染物的空间二维分布图。 此功能使观测者能够在时间序列上直观地观察到船舶尾气污染物的动态变化情况, 为环境监测和污染控制提供数据支持。
本系统不仅增强了对移动目标的捕捉能力, 具有高时间分辨率与实时性, 而且通过结合云台追踪和差分吸收光谱技术, 实现了对船舶尾气污染物的监测和分析, 为环境保护和船舶排放监管提供有力的技术。 进一步计划将此系统搭载于无人机, 测量和计算排放高浓度烟羽的特定船只所用油品的含硫量。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|