










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
EMI-NL星载光谱仪暗电流分析处理方法
[林方1, 2  , 刘文清
, 刘文清1, 2, * , 王煜3 , 常振2 , 张泉2 , 司福祺2 ]
, 刘文清, 王煜|
|


作者简介: 林 方, 1992年生, 中国科学技术大学环境科学与光电技术学院博士研究生 e-mail: linf@aiofm.ac.cn
EMI-NL星载成像光谱仪应用于监测大气痕量气体的全球分布, 搭载电荷耦合器件探测器CCD275, 该电荷耦合器件探测器为国内首次应用, 由于整体体积和功耗相较一般探测器更大, 采用辐射制冷配合加热器的温控方案。 星载成像光谱仪工作在太阳同步轨道, 白天拍摄原始光谱图像, 黑夜拍摄暗背景图像, 原始光谱图像和暗背景图像需要在相同的温度和曝光时间条件下进行拍摄, 数据处理过程中, 用原始光谱图像减去暗背景图像, 获得有效光谱图像, 用于后续的气体反演。 辐射制冷器在轨运行过程中, 有制冷效率降低或完全失效的风险, 这会导致CCD275的温度无法控制, 采集相同温度的原始光谱图像和暗背景图像成为问题。 为了解决温控失效后的特定温度暗背景采集问题, 提出了一种通过计算暗背景代替采集暗背景的方式: 通过采集两组温度已知并且曝光时间不同的暗背景图像, 计算特定温度和曝光时间下的暗背景。 讨论了EMI-NL光谱仪的工作原理、 温控方案和暗背景采集方式, 通过对探测器暗电流特性的研究, 以及对探测器连续帧转移成像方式的分析, 推导出了探测器不同位置像元的像元值与探测器成像温度和曝光时间的关系公式, 并基于该公式提出了暗背景的计算方法。 为验证该方法, 搭建了包括真空系统、 制冷系统和成像电路在内的实验平台, 平台能够控制探测器工作在指定的温度和曝光时间, 并获得该条件下的暗背景。 测试结果表明, 对单点来说, 计算图像与实测图像的相关性达到99.96%, 像元值偏差范围为0.06%~6.9%。 对278 K温度下的图像来说, 计算暗背景与实测暗背景均值相差0.23%, 方差相差-3.20%, 相关系数为99.94%, 像元值偏差范围为-0.70%~2.37%, 暗背景特征点匹配率达到97.9%。 在温控失效的情况下, 计算暗背景能够代替实测暗背景用于光谱图像的处理。
EMI-NL satellite-borne imaging spectrometer utilizing charge-coupled device CCD275 is applied to monitor the global trace gases of the atmosphere. This spectrometer is the first application of CCD275 in China. Since its overall volume and power consumption are more significant than usual CCD detectors, CCD275 uses the thermal design of radiant coolers with heaters. The satellite-borne imaging spectrometer works in a sun-synchronous orbit. It captures original spectrum images during the day and dark background images at night. The original spectrum and dark background images must be captured under the same temperature and exposure time conditions. During the data processing, the dark background images are subtracted from the original spectrum images to obtain valid spectral images for subsequent retrieval of the trace gases. During the on-orbit operation of the radiant cooler, there is a risk of cooling efficiency decrease or complete failure. The risk leads to the temperature control failure of the CCD275, and collecting original spectrum images and dark background images at the same temperature becomes a problem. This paper proposes a method to calculate the dark background images instead of acquiring one to solve the problem of dark background collection at a specific temperature after thermal control failure. This method could calculate the dark background images at any specific temperature and exposure time by collecting two sets of dark background images with known temperatures and different exposure times. This paper discusses the working principle, the thermal design, and the dark background collection method of the satellite-borne spectrometer. The relationship formula, which the method mentioned above is based on, between pixel value, temperature, and exposure time is deduced from the analysis of dark current characteristics and the continuous frame transfer imaging mode. To verify this method, this paper built an experimental platform that included a vacuum system, cooling system, and imaging circuit. The platform can set the detector’s working temperature and exposure time, obtaining dark background images. Statistic results show that the correlation coefficient between the calculated and measured images reaches 99.96% for a single point, and the pixel value deviation range is 0.06%~6.9%. For a full-frame image under 278 K, the mean error between the calculated dark background and the measured one is 0.23%, the variance error is -3.20%, the correlation coefficient is 99.94%, the pixel value deviation range is -0.70%~2.37%. The feature point matching rate reaches 97.9%. When temperature control fails, the calculated dark background can replace the measured one for spectral image processing.
差分吸收光谱仪(differential optical absorption spectrometer, DOAS)广泛应用于大气成分探测。 通过采集经过大气吸收的光谱并对比无吸收的标准太阳光谱, 获得观测点内多种气体的浓度。 将差分吸收光谱仪搭载于卫星平台, 随卫星运动对地面进行扫描, 即可获得不同观测点的气体浓度, 并形成图像, 从而获取在一个空间范围内某种气体成分的分布情况, 可以对全球的大气成分, 污染状况做大范围和准实时的观测。
目前在研的EMI-NL(environment monitoring instrument nadir and limb)载荷是一台高光谱分辨率, 推扫成像的成像差分吸收光谱仪载荷, 以下简称EMI-NL光谱仪, 由安徽光机所研制, 计划2025年发射。 EMI-NL光谱仪是基于帧转移二维面阵CCD探测器的推扫式设备, 能够同时记录被测对象的光谱信息和空间信息。 如图1所示, 在对地观测时, 面阵CCD探测器的一行(沿Wavelength方向)记录地面一点大气辐射的光谱分布信息; 一列(沿Across Track方向)记录不同光谱的空间分布信息, 由卫星向前飞行带动光谱仪对地球大气推扫。 光谱仪每次拍摄的图像为2 600 km× 7 km的狭长条带, 光谱维1 024个像元对应300~400 nm谱段, 光谱分辨率约0.6 nm。 成像过程相当于1 024个线阵CCD在不同的谱线, 同时对地面的一个条带曝光, 沿飞行方向完成对地推扫, 形成二维图像。 EMI-NL光谱仪每日随卫星绕地飞行14轨, 可提供覆盖全球的痕量气体观测[1]。
 | 图1 EMI-NL光谱仪对地观测方式Fig.1 Nadir observation method of EMI-NL |
图2为EMI-NL光谱仪光学系统示意图。 地球大气或地表散射、 反射的光信息通过望远镜会聚后, 经过狭缝选取条带视场, 由中继光学系统转化为平行光后再经过一个凹面光栅分光并投射到面阵CCD上。 这样, 在CCD行方向(平行纸面)是一个像点形成的1 024条光谱; CCD列方向(垂直纸面)取一个条带(1 024像点)图像[2]。
 | 图2 EMI-NL光谱仪光路结构示意图Fig.2 EMI-NL optical layout |
EMI-NL光谱仪随卫星飞行, 每轨经历白天和黑夜, 在白天光照条件下拍摄的光谱图像称为原始光谱图像, 原始光谱图像中存在暗电流, 数据处理过程中, 原始光谱图像需要扣除在相同温度和曝光时间下拍摄的暗背景, 获取有效的光谱图像, 详见下文2.2节所述。 常用的暗背景采集方法是在进光口添加可控制的挡板, 挡板打开, 拍摄原始光谱信号, 挡板关闭, 拍摄暗背景。 但增加挡板会拉长光路, 增加杂散光, 同时增加工程开销和系统的复杂度, 增加系统失效的风险。
EMI-NL光谱仪采用一种在卫星进入黑夜后拍摄暗背景的方式。 卫星进入黑夜后, 认为探测器处于没有光照的状态, 控制探测器的工作温度和曝光时间与拍摄原始图像时一致, 将此条件下拍摄的图像作为暗背景。 该方法不引入额外的工程开销, 但缺点是因为EMI-NL视场覆盖广(2 600 km× 7 km), 在暗背景中会引入城市灯光等杂散光的干扰, 可供暗背景采集的时间窗口较短。
同时, 探测器的温度控制有失效的风险, 详见下文第1章详述, 当温控失效时, 在黑夜中拍摄的暗场温度无法保证与白天拍摄原始数据的温度一致, 这会导致扣除暗背景时的误差。 本文基于上述EMI-NL光谱仪的暗背景拍摄方式, 对CCD275探测器的暗电流特性和成像方式进行了研究, 提出一种通过计算方式获取暗背景的方法。 通过拍摄不同曝光时间的暗背景, 计算探测器暗电流性能的相关参数, 并以此计算出探测器在特定工作温度和曝光时间下的暗背景, 该方法可以在采集数据量相对较少和探测器温控失效的条件下, 较为准确地获得探测器的暗背景。
暗电流是像元由于热激发等原因引起的电荷累积, 具有很强的温度相关性, 在230~300 K温度范围内, 通常温度每升高5~7 K, 暗电流增加约1倍[3]。 暗电流会降低探测器性能, 为了减少暗电流影响, 需要对CCD探测器进行制冷, 空间设备CCD常用的制冷方式有3种: (1)机械制冷器; (2)半导体制冷器; (3)辐射制冷器。
第一种机械制冷器包括斯特林制冷器和脉管制冷器等, 制冷功率高, 但结构复杂, 工作时伴随机械振动, 适用于温度要求极低或探测器热功耗较大的设备。 第二种半导体制冷器, 体积小, 无机械振动, 但制冷效率低, 适合小功率, 控温精度要求高的探测器。 第三种辐射制冷器为被动制冷, 无功率损耗, 但控制温度需要辅助加热, 另外辐冷效率和导热效率都会随时间衰减[4]。
EMI-NL光谱仪的探测器为E2V公司的CCD275, 是一款帧转移面阵科学级CCD, 像元尺寸26 μ m× 26 μ m, 成像面1 024× 1 024像元, 单像元满阱达到700 ke-以上, 具有高灵敏度, 大动态范围的特点, 探测器详细参数如表1所示[5]。 CCD275体积较一般探测器更大, 感光面面积达到26.57 mm× 24.8 mm, 整体体积为70 mm× 50 mm× 6 mm, 工作时的功耗相较一般探测器更大, 不适合使用半导体制冷器, 受星上资源限制也不适合采用机械制冷器。 参考国外同类设备, 最终决定使用辐射制冷器[6]。
| 表1 CCD275基本参数 Table 1 Basic parameters of CCD275 |
CCD温控单元的结构如图3所示, CCD探测器散热面连接铜块作为热沉(Heat sink), 铜块由导热索(Heat cable)连接到热管(Heatpipes), 热管连接到卫星辐冷板(Radiant cooler), 利用宇宙空间的高真空、 深低温和黑热沉条件, 通过辐冷板的高辐射率表面向宇宙辐射能量, 将CCD温度降低到要求的在轨工作温度以下。 热管和铜块上贴装了加热器和热敏电阻, 温控单元通过闭环控制的形式, 控制加热器的加热功率, 将CCD温度控制在一个相对稳定的低温。 正常工作条件下, 探测器能够达到的最低温度为243 K(-30 ℃), 最高温度为251 K(-22 ℃), 探测器正常工作温度为253 K(-20 ℃), 在-2~-10 K的温度空间是给加热器留出的温控裕量。 探测器在不同工作模式下的发热功率不同, 在辐冷板的制冷功率相对固定的情况下, 探测器的工作温度有8 K的变化, 通过控制加热器功率, 在-2~-10 K的区间内, 加热热沉和热管, 使其达到稳定的253 K, 为了节约制冷系统的体积和功率, 这套温控系统采用较小的温控裕量。
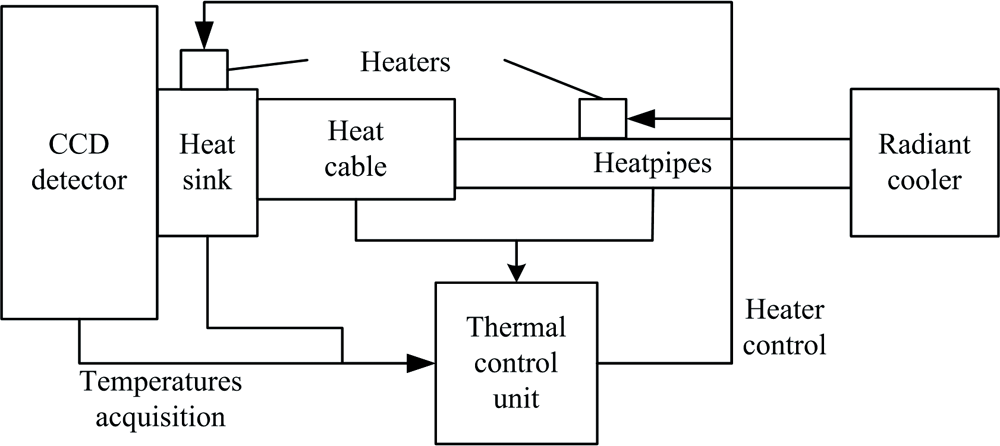 | 图3 CCD制冷结构图Fig.3 Schematic of CCD cooling system |
但是, 在轨运行后期, 由于辐冷面污染, 导热硅脂挥发[7]等原因, 辐冷板的辐冷效率和导热通道的传输效率都会下降, 此时探测器能够达到的最低工作温度将会升高, 如果制冷效率继续下降而导致连接辐冷板后的最低温度高于探测器的工作温度, 为了尽可能保持探测器的性能, 加热器不再打开, 此时为被动制冷方式, 探测器能够正常工作, 但探测器的工作温度已经无法由温控单元控制, 而是由辐冷功率和CCD功率的差值决定。 另外, CCD功率又受读出速度、 曝光时间和光照强度等因素的影响, 这种条件下, CCD探测器的温度随探测器的工作参数变化而变化, 不同温度条件下, 暗背景图像有所区别。 在温控失效的条件下, 对于探测图像的处理, 就不能减去253 K(-20 ℃)温度下采集的暗背景, 而是需要采集不同温度下的暗背景。 CCD的工作温度可以由CCD芯片内置的两个温度传感器获得, 但不同温度下暗背景的采集则成为问题。
下文将对探测器暗电流性能和成像方式进行分析, 并提出一种通过计算方式获取暗背景的方法, 该方法可以在温控失效的条件下, 通过拍摄不同曝光时间的暗背景, 较为准确的获得探测器的暗背景。
暗电流是像元由于热激发等原因引起的电荷累积, 具有温度相关性, 温度越高, 暗电流越大。 暗电流与温度的关系可表示为[8]
式(1)中, Qdark为单个像元在温度T下每秒产生的暗电流, 单位为e-· s-1; Qdark0为单个像元在温度293 K下每秒产生的暗电流, 单位为e-· s-1。 T为开尔文温度, 单位为开尔文, A为阿伦尼乌斯公式的前因子, P为半导体硅能隙系数与玻尔兹曼常数的比值。 在CCD275的数据手册中给出了A的取值为122、 P的取值为-6 400, Qdark0为88 ke-· s-1 [5]。 但由于探测器的批次、 材料、 工艺等因素的差别, 探测器实际的暗电流性能可能与手册值有所区别, 需要以实际测试值为准。
像元实际累积的暗电流与累积时间有关, 表示为
式(2)中, Edark为在一定时间内累积的暗电流电荷数, 单位为e-, tid为暗电流的累积时间, 单位为s, 在下文中称为暗电流积分时间。
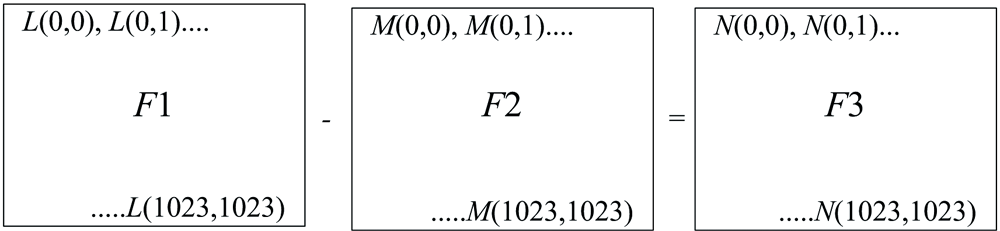
原始图像是探测器在一定光照条件下拍摄的图像, 暗背景是在无光照条件下, 使用与拍摄原始图像相同的温度和曝光时间拍摄的图像, 在数据处理的过程中, 需要使用原始图像减去暗背景以获取有效的光谱数据, 如图4所示[9]。
 | 图4 扣除探测器暗背景Fig.4 Removing CCD dark background |
图4中, F1为原始图像, 其像元值以L表示, F2为暗背景, 像元值以M表示, F3为F1和F2逐个像元值相减后形成的新图像, 像元值以N表示, 像元值的单位为DN(digital number), 表示数字化的像元信号值。 L、 M、 N的下标表示像元在图像中的位置, 探测器有1 024行和1 024列, 最左下角像元的坐标为(0, 0), 右上角像元坐标为(1 023, 1 023)。 L、 M、 N间存在如式(3)关系
式(3)中, L(x, y)、 M(x, y)、 N(x, y)分别表示图4中F1、 F2、 F3中在(x, y)位置的像元值。
图4中, F1表示探测器在一定光照条件下图像, 像元值由本底、 热生电荷和光生电荷三部分组成, 图像中任一像元的像元值可表示为[10]
式(4)中, B(x, y)为像元在无光生电荷和热生电荷条件下的像元值, 称为探测器本底值, 单位为DN; Edark(x, y)为该像元位置产生的暗电流, 单位为e-; Esignal(x, y)为该像元对给定信号产生的光生电荷数, 单位为e-; G为系统增益, 包括了CCD读出电路, 信号放大电路和AD转换电路等环节的整体增益, 表征CCD单个像元输出电荷数与像元值的比例关系, 单位为DN· e--1, 设计值为0.011 5 DN· e--1。
图4中, F2表示探测器暗背景, 根据式(1)和式(2), 暗背景中任一像元的像元值可表示为
式(5)中, 由于材料, 工艺等因素, CCD中不同像元的B(x, y)和Qdark0(x, y)都存在差异, 表现为探测器暗背景像元值间存在差异, 该差异称为暗信号响应不一致性(dark signal non-uniformity, DSNU)。
根据式(4)和式(5), 图4中, F3像元值可表示为
如式(6)所示, 新生成的图像F3中的像元值N(x, y)仅包含光信息, 像元值都由光生电子所产生, 去除了本底和热生电子的影响。
CCD275是一款帧转移CCD, 由于其转移特性, 在成像过程中, 不同位置像元的暗电流积分时间tid(x, y)存在差异, 这是DSNU外, 另一个导致探测器暗背景像元间存在差异的原因。 为了说明tid(x, y)的差异, 需要首先对CCD275的结构和成像方式进行叙述。
CCD275的结构如图5所示, 探测器分为成像区(Imagesection)和存储区(Store section), 成像区和存储区尺寸都为1 024像元× 1 024像元。 成像过程中, 光信号在成像区激发出光电子, 转移到存储区, 再转移到读出寄存器(Readout register), 由左右两通道(Right/Left output)读出。 为了便于下文叙述, 将成像区和存储区以坐标形式在坐标轴上进行表示, 探测器行方向为横轴, 列方向为纵轴, 成像区左下角像元作为原点(0, 0), 存储区左下角的像元坐标为(0, -1 024)。
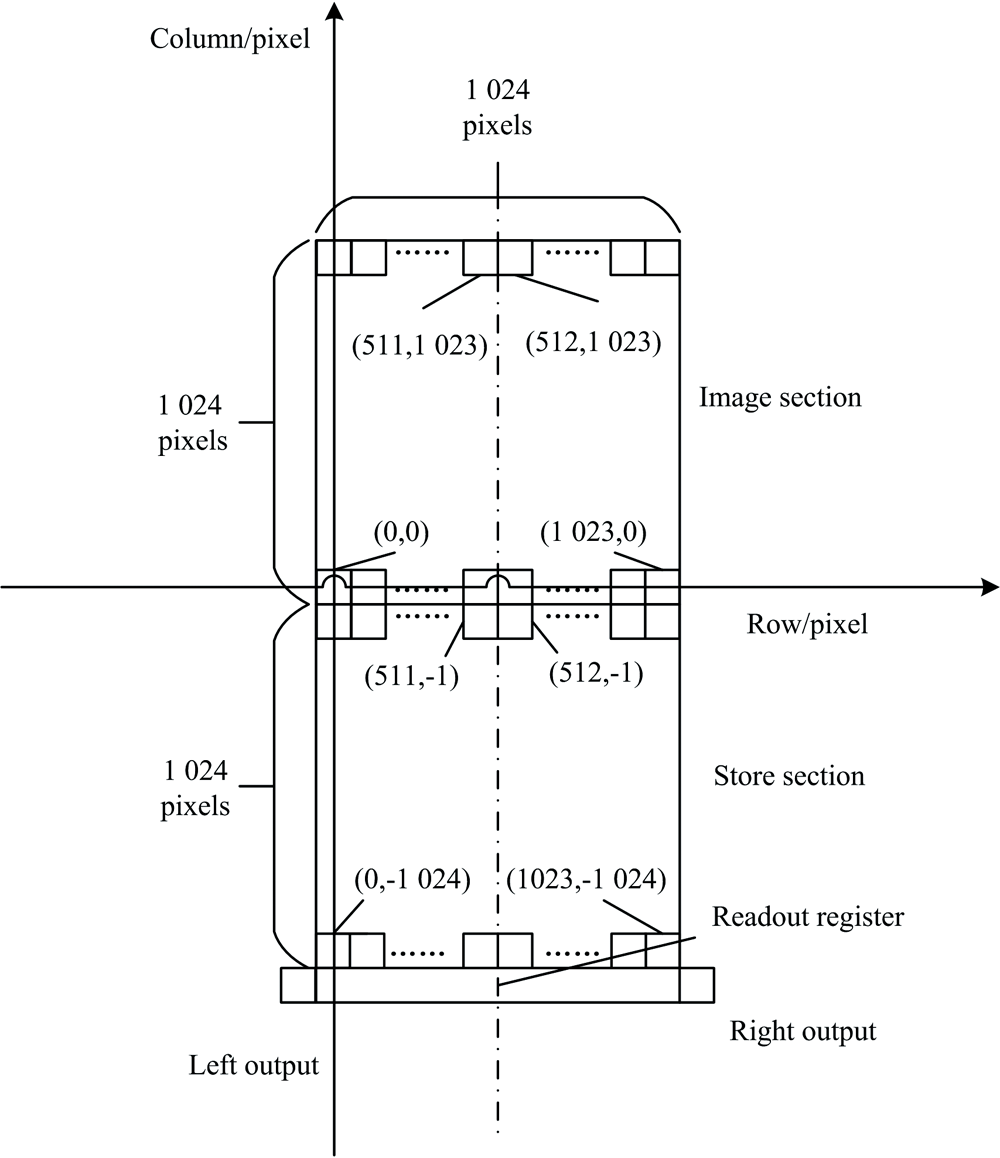 | 图5 探测器成像区和存储区Fig.5 Image section and store section of CCD275 |
CCD275采用连续帧转移的成像方式, 分为曝光、 转移、 读出3个阶段, 如图6所示[11]。 图6(a)为曝光阶段完成后, 转移阶段开始前的时刻, 为便于说明, 假设成像区中图像为一个矩形, A、 B、 C、 D四点的坐标表示方式与图5中坐标一致。 图6(b)为转移阶段完成时刻, 这个时刻也是成像区的下一帧图像曝光开始的时刻。 在转移过程中, 原成像区的电荷被转移到存储区, 原存储区的电荷被清空, 在转移阶段中, 成像区每行像元需要经过1 024次垂直转移, 每次垂直转移的时间记作ttrans, 需要注意的是, 在转移过程完成后, 成像区的下一帧图像也会累积之前行在转移过程中的暗电流。
 | 图6 CCD275成像过程Fig.6 Imaging process of CCD275 |
图6(c)为图像的读出阶段, 存储区图像逐行转入读出寄存器中, 通过左右两个读出通道依次读出, 每个通道读出512个像元, 读出每个像元的时间记作treadout, 与此同时, 成像区的下一帧图像在持续曝光, 成像区中的新图像为一个圆形。 图6(d)为前一帧图像读出阶段的完成时刻, 在读出完成后, 成像区持续曝光, 当曝光阶段完成后, 与图6(a)状态一致, 继续以上文所述过程连续成像, 曝光时间记作texp。
在上述3个阶段中, 未被读出的像元会持续累积暗电流, 造成了探测器暗背景的像元值差异。 图6中A、 B两点最先读出, 累积暗电流的时间最少, C、 D两点最后读出, 累积暗电流的时间最多。 探测器左侧的像元(横坐标小于512)由读出寄存器的左侧通道读出, 包括A、 C两点; 探测器右侧的像元由右侧通道读出, 包括B、 D两点。 探测器图像中任意一点(x, y)的暗电流累计时间可以表示为
式(7)中, 多项式的3项依次表示像元在曝光、 转移和读出阶段的暗电流积分时间。 其中, texp表示曝光时间, 由用户进行设置, 单位为s; Numtrans表示探测器进行垂直转移的次数, 由上文可知取值为2 048, Numtrans与ttrans的乘积表示像元在转移阶段的暗电流积分时间, ttrans设计值为2× 10-6 s; Numline-readout表示一行像元的读出次数, 由上文可知取值为512, 式中第三项括号内表示需要读出的总像元数, 与treadout乘积表示读取像元在读出阶段的暗电流积分时间, treadout设计值为0.4× 10-6 s。 在成像过程中, 为了保证上一帧数据的完整读出, 曝光阶段的时间需要大于读出阶段的时间, 读出阶段的时间为定值, 大约为211.76 ms, 最小曝光时间设置为250 ms。 其中帧转移时间相对于最小曝光时间可以忽略, 式(7)可化简为
式(8)中, 感光面内像元的暗电流积分时间在垂直转移方向(列方向)增加; 在水平读出方向(行方向), 暗电流积分时间由中心位置向两侧递减。 先读出的像元暗电流积分时间较短, 后读出的积分时间较长。
结合式(5)和式(8), 探测器暗背景图像上任意一点(x, y)的暗背景像元值可以表示为
式(9)中, A、 P、 Numline-readout为已知系数, B(x, y)表示该点的本底像元值, Qdark0(x, y)表示单个像元在温度293 K下每秒产生的暗电流, 中括号内为暗电流的积分时间tid(x, y), 由于探测器的工艺、 材料差异, 以及连续帧转移的成像方式, 探测器内不同像元对应不同的B(x, y)、 Qdark0(x, y)和tid(x, y)的值。
由式(9)可知, 对探测器任意像元, 只要知道对应的B(x, y)和Qdark0(x, y)的值, 就能够对该像元在不同温度T和不同曝光时间texp的暗背景像元值进行计算, 通过这种方法, 能够获取探测器在不同温度和曝光时间下的暗背景图像。 因为不同像元对应不同的B(x, y)和Qdark0(x, y)的值, 因此需要获取探测器所有像元对应的B(x, y)和Qdark0(x, y)参数矩阵, 矩阵大小为1 024× 1 024, 与探测器像元位置对应。
由式(9)可知, 获取两种温度或曝光时间不同的暗背景, 就能够对探测器成像面内B(x, y)和Qdark0(x, y)的值进行解算, 以获取探测器参数矩阵。 也可以通过多组不同温度和曝光时间下的暗背景, 通过最小二乘拟合的方式, 获取B(x, y)和Qdark0(x, y)的值。 基于参数矩阵, 能够计算出探测器在特定温度和曝光时间下的暗背景图像。
载荷在轨工作前期, 温度可控, 可以在不同温度, 不同曝光时间下对暗背景进行拍摄, 通过拟合方式获取较为精确的参数矩阵。
载荷在轨工作后期, 如果出现温控失效的情况, 可以在不同的两种或多种曝光时间下拍摄暗背景, 此时虽然温控失效, 但是CCD的工作温度依然可以由CCD芯片内置的两个温度传感器获得, 并包含在暗背景图像的辅助数据中。 B(x, y)和Qdark0(x, y)在轨运行过程中变化缓慢, 因此仅需要定期在轨校正即可[12]。
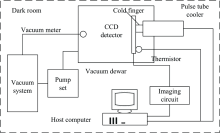
为了对探测器的暗电流性能和本文所述的暗电流计算方法进行验证, 在安徽大学物质科学与信息技术研究院航天电子学实验室搭建了一套真空低温杜瓦系统, 系统结构如图7所示。 因为对暗场进行测试, 平台整体放置在测试专用的光学暗室中。 CCD探测器放置在真空杜瓦罐(Vacuum dewar)内, 脉管制冷机(Pulse tube cooler)的冷指和探测器背部的散热面接触, 对探测器进行降温, 上位机通过热敏电阻实时获取探测器的温度, 并根据温度调节脉管制冷机的功率, 实现对探测器温度的闭环控制, 探测器在该测试平台能够达到的最低工作温度为193 K。 在开始制冷前, 首先需要利用真空系统控制泵组中的干泵和分子泵将真空杜瓦罐内的真空度抽取至1× 10-3 Pa以下并保持, 真空度计(Vacuum meter)可以反映真空杜瓦罐内的真空度。
 | 图7 真空低温系统框图Fig.7 Schematic diagram of vacuum cooling system |
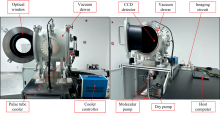
实验设备实物如图8所示, 分子泵和干泵置于系统底座内, 杜瓦罐能够从前后开门, 便于探测器和相关设备的安装工作。 CCD置于杜瓦罐内, 杜瓦罐前门有光窗, 能够配合积分球或平行光管等光学设备进行相关的光学测试, 制冷机安装在杜瓦罐后门, 通过热沉与CCD探测器的散热面接触, 对CCD探测器进行制冷。 这套系统体积小、 制冷功率高、 抽真空时间短, 适用于小型探测器的测试工作。
 | 图8 真空低温系统实物图Fig.8 Real picture of vacuum cooling system |
实验采用两种曝光时间进行暗背景拍摄, 分别为250和500 ms, 每种曝光时间下, 在248~298 K(-25~25 ℃)的温度范围内, 以5 K的温度梯度为间隔拍摄暗背景, 每种温度下拍摄100幅图像。 另外, 探测器共有7组曝光时间(60 ms/90 ms/120 ms/180 ms/250 ms/360 ms/500 ms), 在293 K温度下, 每种曝光时间拍摄100幅图像。
在上述实验中, 使用在(250 ms, 293 K)和(500 ms, 293 K)条件下拍摄的两组暗背景, 选取中心视场内一点P, 坐标为(511, 511), 计算时间域上的像元值均值, 根据式(9), 能够对坐标点的B(512, 512)和Qdark0(512, 512)值进行计算, 式中T为293 K, texp依次取250和500 ms, x和y为点P坐标(511, 511), treadout设计值为0.4× 10-6 s, G设计值为0.011 5 DN· e--1。 获取B(512, 512)和Qdark0(512, 512)值后, 根据式(9), 对P点在相同曝光时间不同温度和相同温度不同曝光时间的暗场分别进行计算, 结果与实测值进行对比, 如图9所示。 图9(a)中, 曲线1为250 ms曝光时间下, 实测的暗场像元值和温度曲线, 曲线2为计算像元值温度曲线, 由图像可知二者相关性良好, 曲线1和2相关系数为99.98%, 像元值偏差在0.1%~4.6%的范围内。 图9(b)中, 曲线1为500 ms曝光时间下, 实测的暗场像元值和温度曲线; 曲线2为计算像元值温度曲线, 曲线1和2相关系数为99.96%, 像元值偏差在0.1%~6.9%范围内。 图9(c)中, 曲线1为293 K温度条件下, 实测的积分时间和像元值曲线; 曲线2为计算像元值曲线, 曲线1和2相关系数为99.87%, 像元值偏差在0.4%~2.4%范围内。
 | 图9 暗电流拟合结果 (a): 250 ms暗背景条件下测量与计算的温度-像元值曲线; (b): 500 ms暗背景条件下测量与计算的温度-像元值曲线; (c): 293 K暗背景条件下测量与计算的温度-像元值曲线Fig.9 Results of dark current calculation (a): Measured and calculated temperature-pixel value curves under 250 ms dark background conditions; (b): Measured and calculated temperature-pixel value curves under 500 ms dark background conditions; (c): Measured and calculated exposure time-pixel value curves under 293 K dark background conditions |
使用在(250 ms, 293 K)和(500 ms, 293 K)条件下拍摄的两组暗背景, 使用上文3.2节述及的方法, 对探测器成像面内所有像元, 都能够计算出该像元对应的B和Q的值, 最终能够得到探测器关于B和Q的参数矩阵, 矩阵大小与像元尺寸一致, 为1 024× 1 024, 如图10所示。 图10(a)中, B的参数矩阵表示探测器的本底, 整体像元值比较平均, 最大最小值相差不超过3个DN值。 图10(b)中, Q的参数矩阵表示像元在温度293 K下每秒产生的暗电流, 均值约为88 652 e-· s-1, DSNU(方差)约为2 708 e-· s-1, 与CCD275手册相符。
 | 图10 B (a)和Q (b)的参数矩阵Fig.10 Parameters matrix of B (a) and Q (b) |
通过参数矩阵, 结合式(9), 能够对不同温度和不同曝光时间的暗背景进行计算。 利用上文述及的两组暗背景数据, 计算出参数矩阵, 再根据参数矩阵计算出(250 ms, 278 K)的暗背景, 与实测值进行对比, 如图11所示。 图11中横纵坐标表示探测器像元的坐标位置, 图中色彩表示像元值, 图11(a)为该曝光时间和温度下的实测暗背景, 图11(b)为利用上文所述参数矩阵, 对(250 ms, 278 K)暗背景的计算结果。 两幅图像的像元值分布规律与式中的暗电流积分时间分布规律基本一致, 先读出的像元值较低, 后读出的像元值较高, 像元值随暗电流积分时间的增加, 呈递增的趋势。
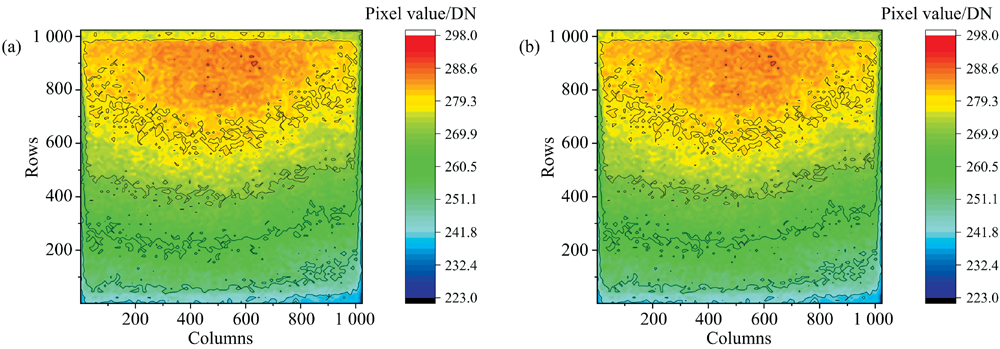 | 图11 图像暗电流拟合结果 (a): (250 ms, 278 K)实测暗背景; (b): (250 ms, 278 K)计算暗背景Fig.11 Results of image dark current calculation (a): Measured dark background at 250 ms and 278 K; (b): Calculated dark background at 250 ms and 278 K |
将两幅图像作差(逐个像元依次相减), 得到的二维分布图和概率分布图如图12所示, 可以看到, 两幅图像的差值主要集中在-1.5~1.5 DN的范围内。 光信号在1/2满阱的条件下, 散粒噪声大约为670 e-, 7.7 DN, 实测和计算暗背景的差值应该小于散粒噪声, 否则会影响光谱的测试结果, 图12中像元差值最大为5.59 DN, 对光谱的影响可以忽略。
 | 图12 计算与拟合图像的差值分析 (a): 计算与实测暗背景差值的二维分布图; (b): 计算与实测暗背景差值的概率分布图Fig.12 Analysis of pixel value differences of calculated and measured dark background (a): 2D distribution map of differences of calculated and measured dark background; (b): Probability distribution plot of differneces of calculated and measured dark background |
两幅图像均值和方差的关系如表2所示, 二者均值相差0.23%, 方差相差为-3.20%, 像元值偏差范围为-0.70%~2.37%, 取第512行图像, 二者相关系数为99.94%。 误差来源包括温控系统的控温精度不足, 探测器相面存在微小温差, 图像采集过程中的电路噪声和暗电流噪声等。
| 表2 计算图像与实测图像的比较 Table 2 Comparison between calculated image and measured image |
利用SIFT(scale invariant feature transform)算法对拟合图像和实测图像进行特征点匹配[13], 考察图像的相似性, 结果如图13所示, 图中左半边图像(横坐标0~511)为尺寸缩小后的拟合暗电流图像, 右侧图像(横坐标512~1 023)为缩小后的实测图像, 蓝色连线表示匹配的特征点。 暗场图像共找到187个特征点, 其中位置完全一致的特征点145个, 横纵坐标相差不大于2个像元的特征点183个, 匹配率达到97.9%。
 | 图13 拟合和实测图像特征点匹配Fig.13 Descriptor match of calculation and measurement image |
综合上文所述, 计算暗背景与实测暗背景一致性较好, 在温控失效的条件下, 能够使用计算暗背景对实测暗背景进行替代。
EMI-NL光谱仪搭载CCD275探测器, 采用辐射制冷的温控方式, 辐射制冷有效降低和温控失效的风险。 温控失效的条件下, 由于探测器的工作温度随曝光时间、 光照强度等条件变化, 拍摄相同温度下的原始光谱图像和暗背景成为问题。 本文研究了CCD275探测器的暗电流特性和成像方式, 提出一种通过两组不同曝光时间的暗背景, 对不同温度和不同曝光时间的暗背景进行计算的方法。 计算暗背景和实测暗背景的均值相差0.23%, 标准差相差-3.20%, 像元值偏差范围为-0.70%~2.37%, 相关系数为99.94%, 特征点匹配率达到了97.9%。 这种方法能够有效解决温控失效的情况下, 在轨运行过程中暗背景采集困难的问题。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|