


{kind=link}
{kind=link}
{kind=link}
日盲紫外拉曼光谱遥测系统及其检测实验
[王维林1  , 郭一新
, 郭一新1 , 金伟其1, 2, * , 裘溯1 , 何玉青1 , 郭宗昱1 , 杨书宁2 ]
, 郭一新, 裘溯|
|


作者简介: 王维林, 1998年生,北京理工大学光电学院光电成像技术与系统教育部重点实验室硕士研究生e-mail: a1752003823@163.com
拉曼光谱检测广泛应用于毒品、 化学品泄漏、 食品安全、 爆炸物残留等领域, 而传统可见光或近红外光的拉曼光谱系统受环境光影响大, 通常需在封闭的样品盒或夜间条件下进行拉曼光谱检测; 常规的紫外拉曼光谱检测则多以微距为主, 难以在自然光条件下适应样品的遥测要求。 面对自然光环境下特殊的拉曼光谱遥测需求, 设计搭建了一套紫外拉曼光谱遥测实验系统, 由266 nm激光光源、 前置光学系统、 信号接收系统和信号处理系统组成, 采用发射光路与收集光路同轴半共用的光学系统设计, 保证了系统对焦的灵活性, 可对远距离物质快速对准聚焦并进行检测; 前置光学系统与信号接收系统使用中继透镜、 光纤、 日盲紫外光谱仪耦合的方式传输与检测了拉曼光谱, 保证了系统整体的灵活性。 采用迭代差分自回归估计的拉曼光谱降噪算法IDAR对检测的拉曼光谱进行降噪, 提升了对样本弱拉曼特征峰的分辨能力。 通过在200~1 500 mm距离、 每隔100 mm设置检测点, 对特氟龙(teflon)、 碳酸氢钠(sodium bicarbonate)、 葡萄糖酸钙(calcium gluconate)、 罗红霉素(roxithromycin)以及布洛芬(ibuprofen)等五种典型物质进行了重复多组不同积分时间、 不同距离的拉曼光谱遥测实验, 并与15 mm微距紫外拉曼光谱检测系统的测试结果进行了对比, 实验结果表明: 遥测系统可对距离1 500 mm处的特氟龙进行有效检测, 对碳酸氢钠、 布洛芬、 葡萄糖酸钙以及罗红霉素等四种样本的遥测距离达到600 mm, 证明日盲紫外拉曼光谱遥测实验系统具有自然环境光下较好的遥测能力, 遥测距离可满足部分现场安全检测、 毒品检测、 爆炸物残留检测以及食品安全检测等应用场景要求。
Raman spectroscopy is widely used to detect drugs, chemical leaks, food safety, explosive residue, and other fields. However, traditional Raman spectroscopy systems using visible or near-infrared light are greatly affected by environmental light. They typically require Raman spectroscopy in closed sample boxes or under nighttime conditions. Conventional UV Raman spectroscopy is mostly based on micro-distances and is difficult to adapt to the remote detection requirements of samples under natural light conditions.This paper designs and builds a UV Raman spectroscopy remote detection experimental system to meet the special remote Raman spectroscopy requirements under natural light environments. It comprises a 266 nm laser light source, front-end optical system, signal reception system, and signal processing system. The optical system design uses a coaxial semi-common optical system for the emission and collection of light paths, ensuring the system’s focusing flexibility. It can quickly align and focus on distant substances for detection. The front-end optical system and signal reception system use relay lenses and fibers and are coupled with a blind UV spectrometer for transmission and detection of Raman spectroscopy signals, ensuring the system’s overall flexibility. Based on iterative differential auto-regression estimation, the Raman spectroscopy denoising algorithm IDAR is used to denoise the detected Raman spectra, enhancing the resolution of weak Raman characteristic peaks in samples.The paper sets detection points at intervals of 100 mm from 200 to 1 500 mm. It conducts repeated multiple sets of Raman spectroscopy remote detection experiments on five typical substances: Teflon, sodium bicarbonate, calcium gluconate, erythromycin, and ibuprofen. The experiments are conducted at different integration times and distances, and the results are compared with those of a 15 mm micro-distance UV Raman spectroscopy detection system. The experimental results show that the remote detection system can effectively detect Teflon at a distance of 1 500 mm and achieve remote detection distances of 600mm for sodium bicarbonate, ibuprofen, calcium gluconate, and erythromycin samples. This proves that the blind UV Raman spectroscopy remote detection experimental system has good remote detection capabilities under natural light conditions and can meet the requirements of some on-site safety inspections, drug detection, explosive residue detection, and food safety inspection applications.
社会存在着诸如环境污染、 食品安全、 危险化学品泄漏、 毒品等影响人类生存的不稳定性因素, 需要提高对目标危险物质的探测能力, 不仅需要对危险爆炸物、 化学品泄露、 毒品的外场遥测, 而且市场中也有对违禁药品、 食品安全等遥测需求[1, 2, 3]。 拉曼光谱检测作为一种新型非接触式光散射无损检测技术[4, 5, 6, 7], 通过激发光与物质分子间产生非弹性能量交换, 改变光的频率分布, 形成物质的特征拉曼散射光谱, 实现对目标物质的光谱分析。 由于激光器、 探测器等器件性能的限制, 以往的拉曼光谱研究和应用多集中在可见光或近红外波段, 因环境光影响需在封闭的样品盒或夜间条件下进行拉曼光谱检测[8], 如采用蓝绿激光拉曼光谱结合门控增强技术可实现夜间乃至数百米以上的拉曼光谱检测[9], 而白天自然环境下遥测时无法避免自然光的影响。
由于地球臭氧层的存在, 大幅度降低了对地面紫外拉曼光谱探测的环境光干扰[10, 11], 更加适用于自然环境下的现场遥测应用。 由于拉曼散射强度与入射光频率的四次方成正比[12], 在相同功率条件下, 紫外拉曼光谱的信号强度明显高于可见光及近红外波段, 有利于弱散射拉曼信号的检测; 紫外拉曼光谱与荧光光谱可完全分离[13], 有利于去除荧光效应对拉曼信号的影响。 正因为大气路径紫外光的消光明显, 常规的日盲紫外拉曼光谱检测难以在自然环境下实现更远距离的遥测应用, 采用大口径的门控增强日盲紫外拉曼光谱检测距离可达到数十米到数百米的检测距离[14]。
近年来研究了日盲紫外拉曼光谱检测技术[15], 研制的检测实验系统实现了自然环境下的典型样品日盲紫外拉曼光谱检测, 而对于紫外拉曼光谱遥测能力尚未有效验证。 本研究改进了日盲紫外拉曼光谱检测实验系统, 基于266 nm日盲紫外激光光源, 设计了发射光路与接收光路部分共用、 各自调节的同轴透射式光学系统, 使其适合拉曼光谱遥测; 针对系统自然光环境下常规便携式检测的应用背景, 选择典型样品进行紫外拉曼光谱遥测实验, 以验证遥测系统的有效性及其遥测能力。
1928年, 印度科学家Raman发现了与入射光频率不同的散射光, 发现了拉曼散射效应[16]。 基本原理是: 使用一束频率为ν 的定向, 提交的word中有光束照射物质, 在与物质表面相互作用发生弹性散射和非弹性散射, 其中大多数的散射光为弹性散射后形成的瑞利散射, 少部分微弱的散射光为频率发生变化的非弹性散射即拉曼散射[8]。
拉曼光谱检测系统包含发射光源、 前置光学系统、 样本色散、 接收系统以及信息处理系统等五部分。 光源发射激光经发射光路聚焦到物质样本, 发生散射后由前置光学系统收集拉曼散射光并滤除瑞利散射光, 再经接收系统收集拉曼散射光分谱并传入电脑进行后期信息处理及显示等。
本工作设计搭建的紫外拉曼光谱遥测实验系统, 其光路如图1(a, b)所示, 由266 nm紫外激光器、 紫外光谱仪、 前置光学系统和信息处理系统组成。 激光脉冲垂直穿过焦距15 mm的10倍紫外透镜a聚焦, 经BS (266 nm, Semrock, Bright Line)双向色镜反射, 到达焦距60 mm、 F/1.7、 对焦范围为0.45 m~+∞ 的定焦紫外镜头, 经前置紫外物镜二次聚焦到样品表面; 物质样本被激发出的散射光经前置紫外物镜收集, 在BS双向色镜处过滤266 nm (含266 nm)以下的散射光, 经焦距35 mm的紫外透镜b后转换为平行光进入光纤前端的中继收集透镜, 经由光纤导入至拉曼光谱仪。 光谱仪经USB连接至电脑, 由OceanView软件平台进行成谱显示, 进一步采用相关的拉曼光谱处理算法进行预处理和智能光谱识别。
 | 图1 紫外拉曼光谱遥测实验系统 (a): 光路设计; (b): 实验装置Fig.1 Remote ultraviolet Raman spectroscopy experimental system (a): Optical path design; (b): Experimental device |
考虑到日盲紫外激光的拉曼光谱的特点, 选用266 nm日盲紫外激光作为激光光源。 拉曼光强IR与入射光频率ν 0的4次方成正比[4]。
式(1)中, c为光速; ν 0为入射光频率; h为普朗克常数; IL为激发光强度; N为散射分子数; ν 为分子振动频率; μ 为振动原子折合质量; K为玻尔兹曼常数; T为绝对温度; α a为极化率张量平均值不变量; γ a为极化率张量有向性不变量。
激光器的选择需考虑拉曼光谱的细节, 用窄线宽激光器获得更细窄的谱峰; 同时拉曼散射光约为入射光10-6的量级, 即拉曼散射强度很弱, 需要尽可能地提高激光器的激发能量; 由于各紫外镜头的口径限制, 需要较小的激光发散角和光斑。 选用了长春光机所四倍频Nd∶ YAG脉冲激光器DPS-266-Q, 主要参数为波长266 nm, 单脉冲能量2~5 mJ, 光斑尺寸约2 mm, 脉冲宽度< 10 ns, 重频1~100 Hz。
光谱仪选择主要考虑光谱范围、 光谱分辨率和低噪声, 以满足对极为微弱的拉曼信号的探测。 假设拉曼光谱探测范围0~5 300 cm-1, 最大拉曼位移对应的波长λ max,
式(2)中, Δ RS=5 300 cm-1为拉曼光谱的拉曼位移范围; λ =266 nm为激光器波长, 对应拉曼位移为0 cm-1; λ max=309.655 nm为5 300 cm-1时对应的拉曼散射波长。 确定系统的光谱范围为266~310 nm。
拉曼光谱的拉曼位移分辨率不低于10 cm-1, 可得光谱仪光谱分辨率不应低于0.1 nm; 进一步考虑灵敏度及低噪声等需求, 最终选用海洋光学QE-pro光谱仪[主要性能参数为波长范围260.6~340.4 nm, 光谱分辨率< 0.1 nm (FWHM), 系统信噪比1 000∶ 1, A/D分辨率18 bit, 动态范围85 000∶ 1, 杂散光< 0.08% (600 nm); 0.4% (435 nm), 热电制冷TE制冷 (使用温度范围0~50℃)], 其动态范围涵盖拉曼光谱探测范围, 光谱分辨率满足最低检测要求, 同时其TE制冷可大幅度降低热噪声影响。
前置光学系统由发射光路与收集光路组成, 其中紫外透镜a与紫外物镜组成发射光路; 紫外物镜与紫外透镜b组成收集光路的望远部分, 经中继透镜会聚在石英光纤上实现与紫外光谱仪连接。
前置光学系统设计: 在望远镜结构上, 反射式望远镜结构对反射面的精度、 装调要求较高, 且反射镜面的存在会导致中心部分拉曼散射光的收集效率降低; 拉曼光谱探测时, 主要以对能量的收集为主, 对成像质量的要求不高, 因而选用结构更为简单, 中心无遮挡收集效率更高的透射式望远镜作为光学收集部分的主要结构。
在发射光路和收集光路同轴或离轴的选择上, 离轴光路的激光器直接对准目标, 可减少发射激光的损耗, 而实际检测过程中后向散射的能量较大, 要求激光器的发射激光光路与光学接收光路的夹角很小, 才可保证收集光路可以最大效率地收集散射光, 要求实际激光器与其他系统的位置摆放需要占据很大的面积, 难以达到预期的检测效果; 离轴倾斜光路需要在每次调整检测距离时进行初始对准, 以保证激光器和望远镜的光轴在目标样本处汇集, 极大的增加了实际操作的难度。 本系统采用共轴光路, 可增加系统稳定性, 大大降低了实际搭建使用难度。 同时入射激光光路与散射光收集光路只共用前端紫外镜头, 即两光路分别独立焦距可调, 可适应不同样本物质在不同距离下的检测。 相比于两光路共用紫外透镜(f=35 mm)与紫外镜头, 可有效避免实际搭建过程中系统像差带来的发射激光与收集光路在样本处焦点不重合问题, 为后续激光聚焦、 虚焦测量等提供了灵活可调性。
在透镜、 镜头的选择: 紫外物镜与紫外中继透镜的选择主要考虑拉曼散射光的收集效率, 需要在紫外区域(240~360 nm)有良好的光谱透过率。 紫外物镜需大口径来提高拉曼散射光的收集效率, 选用了口径30 mm, 焦距为60 mm, 调焦范围0.45 m~+∞ 的石英定焦紫外物镜。 紫外中继镜头b选用THORLABS公司LA4052-UV-ML, 直径1英寸, 焦距35 mm; 紫外中继镜头a只需保证出射激光的通过, 选用了THORLABS公司焦距15 mm的LMU-10X-UVB。
选择分束镜BS要求在小于266 nm有90%以上的反射率, 以尽可能减少激光反射光以及瑞利散射光的影响。 实际选用Semrock公司Laser BrightLine系列的二向色性长波通分光滤光片, 规格参数为滤光片尺寸25.2 mm× 35.6 mm, 有效折射率2.17, 通光孔径≥ 80%, 反射带Ravg> 90% (@230~245 nm), Rabs> 94% (@245~266 nm), Rabs> 90% (@245~266 nm (p-pol)), Rabs> 98% 245~266 nm (s-pol), 边缘波长273 nm, 传输带Tavg> 90% (@277~1 200 nm)。
对市面上可购买的特氟龙、 碳酸氢钠片、 布洛芬片、 罗红霉素片以及葡萄糖酸钙片等五种典型样本进行了不同距离的检测。 这五种样本的拉曼效应强弱、 化学结构式以及荧光效应影响各不相同, 在拉曼光谱区域呈现出不同的拉曼特征峰以及不同程度的荧光影响。 对样本的处理, 由于布洛芬片有糖衣包裹, 罗红霉素片以及葡萄糖酸钙片有薄膜衣包裹, 在实验时将其分为两半, 取其内部中间部分进行检测以避免药品外衣干扰。 实验中样品温度控制在室温, 样本位置从距离紫外镜头200 mm处开始设置, 每间隔100 mm进行一次检测, 对特氟龙进行了200~1 500 mm间的检测, 对其他四种样本进行了200~600 mm间的检测。 实验使用Ocean View软件进行样本光谱采集, 同一距离位置下, 每类样品每次检测实验采集30组, 以1~5 s, 间隔1 s的积分时间分别进行5次光谱采集。 特氟龙共采集14个位置, 共计2100组数据; 碳酸氢钠共采集5个位置, 共计750组数据; 其余三种样本共采集5个位置, 由于其拉曼信号衰减很快, 只在1 s的积分时间下进行采集, 共计480组数据。 由于在对不同样品不同位置进行检测前, 都需要对发射光路和接收光路进行调焦, 对背景信号的探测均会发生改变, 因而在每类样品每个位置下均进行与样本检测时相同积分时间下的空背景数据采集。
为保证实验的准确性, 每次实验对采集的30组数据均进行记录, 将其平均结果作为初始数据。 得到数据后对不同积分时间的结果进行对比, 最终统一采用1 s积分时间下的光谱数据进行处理。 由于采集过程会突然出现单一的高强度信号, 其明显不属于特征峰, 不能直接进行简单的多组数据的平均。 为此, 对原数据中的离散值进行剔除, 并对剩余数据进行平均计算, 得到更为准确清晰的拉曼光谱数据。 背景扣除由于不同镜片间距离的调整, 导致空背景拉曼光谱的信号强度发生变化, 因而对每一类样品在不同位置下分别扣除对应的背景很必要。 对数据进行离散值剔除、 多组数据平均以及背景扣除后, 做数据归一化及多项式基线校正处理。
图2(a— e)分别为特氟龙、 碳酸氢钠、 葡萄糖酸钙、 罗红霉素以及布洛芬在1 s积分时间不同距离下的拉曼光谱结果。 其中图2(a)中由下至上依次为距离300、 500、 700、 900、 1 100、 1 300和1 500 mm的光谱曲线。 其余四幅图中每幅图由下至上依次为距离200、 300、 400、 500和600 mm的光谱曲线。 为方便对比不同距离上的光谱检测结果, 图中各距离上的检测结果均进行了归一化处理。 可以看出, 对于强特征峰的分辨, 各样本在不同距离上均有着良好的分辨效果, 强特征峰清晰可辨; 而随着检测距离的增加, 各样本出现了不同程度信噪比的下降, 导致弱峰淹没、 噪声突出以及连续峰的分辨难度提高, 其中拉曼信号最强的特氟龙效果最好, 1 500 mm处其位于233、 320、 527和2 545 cm-1的弱峰才难以分辨; 其他四种样本拉曼信号较弱, 在不做降噪处理时600 mm处弱峰难以分辨。
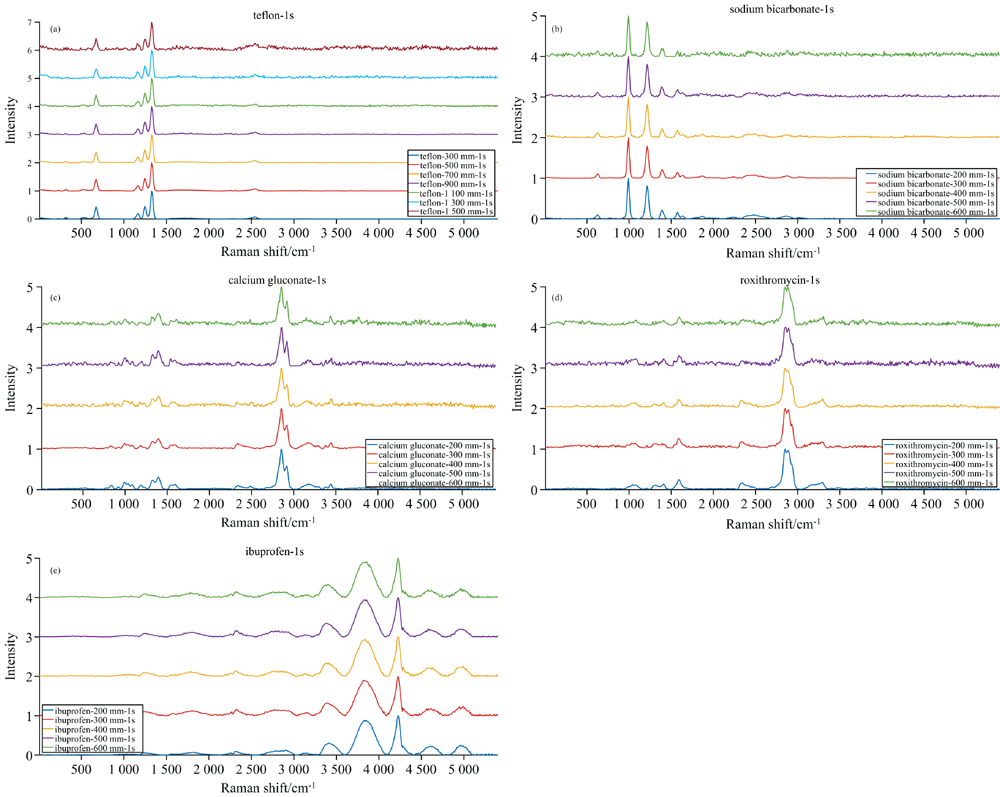 | 图2 1 s积分时间下各样本在不同距离下的检测结果 (a): 特氟龙; (b): 碳酸氢钠; (c): 葡萄糖酸钙; (d): 罗红霉素; (e): 布洛芬Fig.2 Detection results of samples at different distances under 1 s integration time (a): Teflon; (b): Sodium bicarbonate; (c): Calcium gluconate; (d): Roxithromycin; (e): Ibuprofen |
为对本系统检测结果进行对比分析, 使用前期完成的微距紫外拉曼光谱系统[15]进行相同样本的拉曼光谱数据采集的对比实验。 采用266 nm四倍频Nd∶ YAG激光器, 功率20 mW, 重频3~5 kHz; 光谱仪型号与本系统光谱仪相同, 同样采用海洋光学QE-pro光谱仪。 拉曼通道光谱分辨率0.1 nm, 目标探测距离15 mm, 拉曼光谱范围360~6 600 cm-1。
使用微距拉曼光谱系统对五种样品在15 mm的距离上进行检测, 积分时间选用1~5 s对特氟龙和碳酸氢钠进行数据采集, 每次采集30组数据, 对拉曼效应短的另外三种样本只使用1 s积分时间进行数据采集, 采集30组数据, 并对该系统的空背景进行采集。 数据采集过后, 同样进行去除离散数据、 平均以及扣除背景、 对数据进行归一化并做多项式基线校正的数据处理。
采用所提出的迭代差分自回归估计的拉曼光谱降噪算法(iterative differential autoregressive spectrum estimationfor Raman spectrum denoising, IDAR)[17]对两套系统的检测数据进行处理, IDAR算法抗噪能力强、 不损失分辨率、 定位峰线精准, 可以有效应用于信噪比低的遥测拉曼光谱数据处理分析。 针对不同的样本数据, 合理调整算法迭代次数以及拟合阶数, 获得降噪效果最好的数据结果。
图3(a— e)是经IDAR算法处理后的两系统检测对比结果, 其中每幅图的最下面一条谱线为三通道紫外拉曼光谱系统检测结果。 对比图2可以看出降噪处理后, 各样本远距离检测的信噪比均有了明显增强。 与三通道紫外拉曼光谱系统检测结果对比, 可以看出本系统在各距离上的检测结果, 峰位准确、 强特征峰分辨良好; 在弱峰分辨以及噪声干扰上, 特氟龙、 碳酸氢钠均可以看出准确的拉曼弱峰, 特氟龙只有在1 500 mm距离上出现了3 110 cm-1后的微弱噪声干扰; 碳酸氢钠只在600 mm距离上出现了3 110 cm-1后的微弱噪声干扰; 在对布洛芬的检测, 各距离的拉曼谱峰均有着良好的信噪比, 峰形峰位准确; 葡萄糖酸钙的弱峰、 连续峰检测结果较好, 仅在500和600 mm的距离上出现了噪声干扰的微弱宽峰; 对于拉曼信号较弱的罗红霉素, 其弱峰、 连续峰检测良好, 仅在500和600 mm处出现了较多的噪声干扰峰, 但整体特征峰均能有效检测。
 | 图3 IDAR算法处理的两系统紫外拉曼光谱检测结果 (a): 特氟龙; (b): 碳酸氢钠; (c): 葡萄糖酸钙; (d): 罗红霉素; (e): 布洛芬Fig.3 The detection results of ultraviolet Raman spectra of two systems processed by IDAR algorithm (a): Teflon; (b): Sodium bicarbonate; (c): Calcium gluconate; (d): Roxithromycin; (e): Ibuprofen |
拉曼光谱广泛应用于毒品检测、 爆炸物分析、 化学品泄漏预警等领域, 可见光和近红外拉曼光谱系统虽已有便携式拉曼光谱设备, 而遥测易受环境光的干扰, 需要采用测试暗盒才能进行测量。 本工作搭建了日盲紫外拉曼光谱遥测实验系统, 采用266 nm激光作为发射光源, 设计了发射光路与接收光路分离可调的前置望远系统, 增加了不同探测距离下系统对准调焦的灵活性。 通过对特氟龙、 碳酸氢钠以及罗红霉素等五类典型样本在200~1 500 mm的不同距离的检测, 通过使用迭代差分自回归估计的拉曼光谱降噪算法提高了光谱信噪比, 并与15 mm处微距样品紫外拉曼光谱检测的对比检测实验, 验证了紫外拉曼光谱遥测结果的有效性, 其中对特氟龙的检测距离可达1 500 mm, 对碳酸氢钠、 葡萄糖酸钙、 布洛芬以及罗红霉素的检测距离可达600 mm。 这种紫外拉曼光谱遥测距离可满足现场安全检测、 毒品检测以及食品检测等多种应用要求。
紫外拉曼光谱遥测实验系统的性能受各类器件性能的影响。 未来可考虑换用更高功率的激光器, 更大口径紫外收集镜头以提升系统的激发能量与信号收集能力, 同时考虑使用增强电荷耦合器件来对微弱的拉曼散射信号放大, 进而在系统硬件方面提升系统的探测距离。 开发更为有效的拉曼光谱降噪算法, 以提高拉曼光谱信噪比, 从而更好地保留弱峰细节, 进一步提高远距离遥测的准确性。 检测对象的浓度和距离是检测信噪比被限制的主要因素。 重点研究遥测系统在不同距离上的检测效果, 即通过设置不同距离的实验, 确定遥测系统在距离上的检测限度, 未来可进一步对浓度检测限进行研究。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|