







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
变温条件下的红外偏振BRDF快速测量系统
[黄昂1  , 王景辉
, 王景辉1, * , 董伟1 , 孟凡山1, 2 , 黄帅1 , 李益文3 , 冯国进4 ]
, 王景辉, 董伟|
|


作者简介: 黄 昂, 1994年生, 中国计量科学研究院热工计量科学研究所助理研究员 e-mail: huangang@nim.ac.cn
在变温条件下的红外偏振BRDF能准确反映材料表面的辐射特性, 为表面光学特性研究提供基础数据, 在热成像和红外目标检测等领域有广泛的应用前景。 然而, 目前的偏振BRDF测量系统主要采用离散逐点扫描方式, 单角度扫描时间在5 min以上, 完整BRDF测量时间达数小时, 并且分辨率较低。 在应用于变温测量时, 需要长时间保持样品表面的高温, 这会导致能耗增加且实施困难。 因此, 迫切需要研究快速测量方法。 研制一套可实现室温~1 000 ℃便携式样片加热的红外偏振BRDF测量系统, 克服机械臂的负载和耐温问题。 针对研制系统构建测量模型, 并提出一种基于机械臂的偏振BRDF连续扫描方法, 通过机械臂离散转动-环轨连续扫描和环轨离散转动-机械臂连续扫描两种方式实现不同偏振态下的三维BRDF快速连续测量, 在提高测量速度的同时提高了测量分辨率, 单角度扫描时间在1 min以内, 完整BRDF测量时间缩短至约1 h, 更适用于变温BRDF测量。 将所提出的测量方法应用于镜面反射较强的磨砂不锈钢样片表面变温BRDF测量, 针对强反射位置附近进行精细连续扫描, 获得6.1×10-6、 1.37×10-5和3.81×10-5 sr三种探测立体角度下的局部偏振BRDF三维分布。 立体角越大, 空间滤波效果越强, 显现出更小的测量峰值, 这与BRDF理论测量模型相吻合。 因此, 在进行强镜面反射材料的BRDF测量时, 需要采用小立体角探测, 减小空间滤波效应, 不锈钢样片测量采用6.1×10-6 sr的立体角。 在变温实验中, 当温度升高时, 不锈钢样片表面发生氧化反应, S和P偏振BRDF峰值均随温度升高而降低, 两个偏振态下的最大测量标准差相比于BRDF平均值占比分别为0.56%和0.24%, 不同温度下BRDF测量重复性较好, 且两者变化趋于一致, 说明了研制系统的偏振BRDF测量的有效性。
Infrared-polarized BRDF at variable temperatures can accurately reflect the radiation characteristics of the material surface, provide basic data for studying the optical properties of the surface, and have a wide range of applications in thermal imaging and infrared target detection. However, existing polarized BRDF measurement systems mainly use a discrete point-by-point scanning strategy, with a single-angle scanning time of more than 5 minutes and a complete BRDF measurement time of several hours, and the resolution is relatively low. When BRDF systems are applied to variable temperature measurements, high temperatures must be maintained on the sample surface for a long time, which leads to increased energy consumption and is difficult to implement. Therefore, there is an urgent need to investigate fast measurement methods. In this work, an infrared polarization BRDF measurement system with a portable sample heater from room temperature to 1 000 ℃ was developed, and the mechanical arm’s load and temperature resistance problems were overcome. A continuous scanning method of polarized BRDF based on a robotic arm was proposed. Fast and continuous 3D BRDF measurements in different polarization states were realized in two ways: discrete rotation of the robotic arm with continuous scanning of the rotary table and discrete rotation of the rotary table with continuous scanning of the robotic arm, improving the measurement speed and resolution. The single-angle scanning time was less than 1 minute, and the complete BRDF measurement time was shortened to about 1 hour, which is more suitable for variable-temperature BRDF measurements. The developed system was applied to measure the BRDF of a frosted stainless steel sample with a high specular reflection surface at variable temperatures. The area of strong reflections was finely scanned continuously, and three-dimensional distributions of polarized BRDF at three solid angles of 6.1×10-6, 1.37×10-5, and 3.81×10-5 were obtained. The larger the solid angle, the stronger the spatial filtering effect, revealing smaller measurement peaks, which was consistent with the physical model of BRDF. Therefore, it is necessary to use a small solid angle to minimize the spatial filtering effect for measurements of highly specular materials. The stainless steel sample in this work was measured with a solid angle of 6.1×10-6 sr. In variable temperature experiments, the oxidation reaction occurred on the stainless steel surface with increasing temperature, and the S- and P-polarized BRDF peaks both decreased. The maximum standard deviations of the measurements in the two polarization states were 0.56% and 0.24%, respectively, compared to the average BRDF value. The repeatability of BRDF measurements was good at different temperatures and the changes of the two polarization states converge to be consistent, indicating that the developed polarized BRDF measurement system was effective.
双向反射分布函数(bidirectional reflectance distribution function, BRDF)是一种表示材料表面反射特性的基本物理量, 定义为各个方向的反射亮度与入射方向照度的比值[1]。 在红外波段、 考虑入射光偏振效应的BRDF分布称为红外偏振BRDF, 能反映样片表面的完整红外光学特性, 其高精度高分辨测量为三维图像渲染和光学建模提供重要的基础数据[2]。
变温红外BRDF是高温合金材料表面涂层光学特性分析的重要参数, 能反映材料在变温条件下的红外光学性能。 早期的变温红外BRDF测量通过高能激光加热样片。 美国空军研究所利用高能激光实现航空航天金属和复合结构材料表面室温-900 ℃的变温控制, 实现1.3 μ m下的BRDF分布高精度测量[3]。 美国约翰霍普金斯大学利用高能激光将陶瓷涂层表面加热到1 000 ℃, 变温BRDF测量结果与TIR模型十分吻合[4]。 但是, 高能激光加热可能使得表面实际温度远远超过设定温度, 引起表面涂层熔化甚至蒸发, 破坏样片表面微观结构, 改变被测样片的表面光学特性, 使得BRDF测量结果不准确[5]。 哈尔滨工业大学用腔式加热炉代替激光加热, 实现铜表面室温~500 ℃的变温测量, 避免了激光加热破坏表面结构的问题[6], 并对289~773 K钛合金粗糙表面进行偏振BRDF测量, 总体误差不大于3.29%[7]。 但是, 加热炉体积大, 容易干扰BRDF空间运动。 为减小加热器体积, 便于BRDF测量, 河南师范大学研制了平面加热器, 实现室温~800 ℃黄铜表面BRDF测量[8, 9]。 然而, 以上变温BRDF测量系统的运动均通过多轴旋转平台控制, 入射角和反射角可独立控制, BRDF角度与旋转平台的映射关系简单。 但是, 自行研制的多轴旋转平台结构复杂, 控制精度难以保证。
随着机械自动化技术的快速发展, 多轴机械臂已经实现工业化, 并已经初步应用于常温BRDF测量[10]。 德国PTB、 美国NIST、 加拿大计量院等均采用多轴机械臂和环形轨道实现了BRDF测量, 转动机构的设计被大大简化[11, 12, 13]。 但是, 均需要根据测量的BRDF的四角度推出机械臂各轴旋转的具体角度, 这样测量是离散的, 无法实现空间运动扫描, 使得测量速度较慢。 而变温控制耗能高, 长时间稳定困难, 需要较快的测量速度, 并且机械臂抓手对接触温度、 载荷重量均有较为苛刻的要求, 使得基于机械臂的BRDF测量系统尚未用于变温BRDF测量。 在我们之前的工作中, 构建了从机械臂-环轨转轴到BRDF空间四角度关系的映射, 提出一种机械臂环轨连续转动的BRDF测量方法, 极大地提高了BRDF测量速度[14, 15]。 但未考虑偏振对变温BRDF测量的影响。
本文研制室温~1 000 ℃变温红外偏振BRDF快速测量系统, 并构建机械臂-环轨转轴到偏振BRDF空间四角度关系, 设计满足机械臂温度载重空间运动各项要求的便携式加热器。 将研制系统应用于磨砂SU314不锈钢样片表面测量, 通过对比传统离散扫描方式和提出的连续扫描方式, 验证连续扫描方式的有效性。 实现样片S和P偏振态下的BRDF三维分布测量以及变温条件下的样片偏振BRDF测量, 验证研制系统的有效性。
样片直角坐标系(
式(1)中, Pi和Pr分别是偏振入射和反射光功率, Ω r为探测器孔径的立体角, 表示为
式(2)中, A为探测器表面积, D为样品中心到探测器的距离。
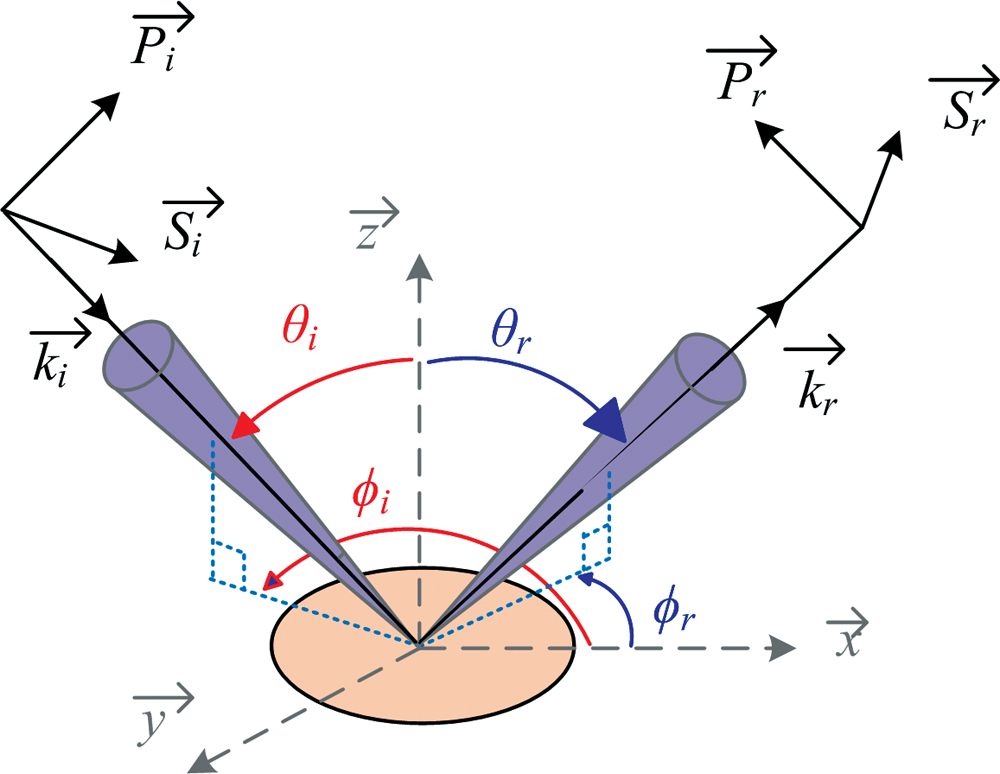 | 图1 BRDF四角度(θ i, ϕ i; θ r, ϕ r)空间示意图Fig.1 Spatial schematic of BRDF four-angles (θ i, ϕ i; θ r, ϕ r) |
本文研制的偏振变温BRDF测量系统由激光发射模块, 加热模块, 机械臂-环轨运动模块和探测及信号后处理模块组成, 所有实验测量均在光学暗室中完成, 如图2所示。 以样片中心为原点, 激光入射方向为-
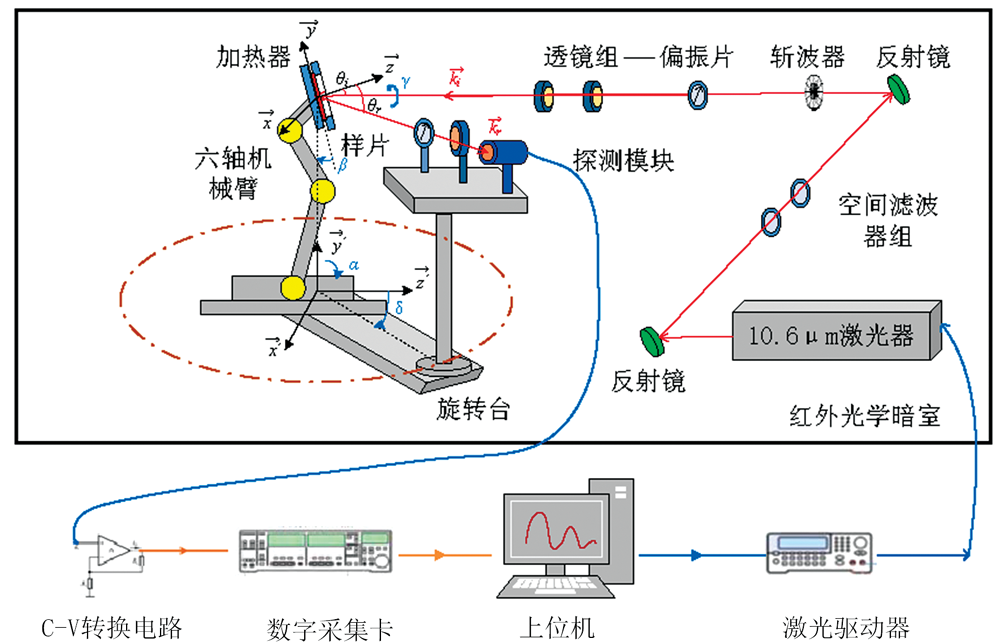 | 图2 偏振BRDF快速测量系统示意图Fig.2 System schematic for polarized BRDF rapid measurement |
在激光发射模块中, 激光驱动器驱动CO2激光发射器发出强度稳定的10.6 μ m单波长激光, 激光功率为0.8 W。 斩波器工作频率范围为40~4 000 Hz, 为抑制工频噪声, 调制频率设置为200 Hz。 激光通过斩波器调制后穿过两个空间滤波器以锁定激光光路位置, 使得激光沿-
用于被测样片温度控制的加热模块如图3所示, 其安装于机械臂抓手上。 加热模块3D爆炸示意图如图3(a)所示, 包括顶部盖板、 加热器核心、 底部隔热层组成。 其中, 加热器核心部分由加热槽、 热电偶、 加热片组成。 S型热电偶和碳化硅材质的加热片分别嵌入加热槽内部和下方, 热电偶将加热槽的温度实时反馈给PID控制器, PID通过控制输出功率控制加热片的热量输出, 保证加热槽温度稳定在设定温度。 加热器外壳内部填充石棉, 对加热器核心进行保温。 隔热层之间两两相距2 cm, 保证隔热层与空气充分换热。 最底层隔热层与机械臂抓手连接, 当加热器核心温度为1 000 ℃时, 通过隔热层与空气的充分换热, 由接触式测温计测得最底层隔热层的温度为31.5 ℃, 满足机械臂抓手工作温度不超过40 ℃的要求。 且最后两层隔热层设计为圆形, 避免机械臂携载加热器运动过程中发生碰撞。 组装后的加热器如图3(b)所示, 顶部盖板的平面低于加热槽上表面, 保证样片嵌入加热槽上方凹槽后样片表面无遮挡, 可实现样片表面半球空间的BRDF完备测量。 组装后的加热器的整体尺寸为d=10.0 cm, l=12.4 cm, h1=4.80 cm, h2=2.60 cm。 在目前加热器整体尺寸下, 可实现0 rad≤ θ i≤ 1.047 rad, -1.57 rad≤ θ r≤ 1.57 rad, -3.14 rad≤ ϕ i≤ 3.14 rad, -3.14 rad≤ ϕ r≤ 3.14 rad角度范围的BRDF的完备测量。 如需增加入射天顶角θ i的范围, 可通过增加h2实现。 加热器制作材质采用GH2747高温合金, 密度为7.87 g· cm-3, 整体体积为170 cm3, 即组装后加热器的总重量为1.3 kg, 满足机械臂的负载不超过3.5 kg的要求。
 | 图3 安装于机械臂抓手的样片加热模块 (a): 3D爆炸示意图; (b): 安装有不锈钢SUS-314样片的实物照片Fig.3 Sample heating module mounted on the gripper of the robotic arm (a): 3D explosion schematic; (b): Photo with a stainless steel (SUS-314) sample installed |
BRDF测量时, 利用机械臂在世界坐标系下的旋转分离BRDF入射角和反射角的测量。 首先调整样片姿态使得机械臂和旋转台处于初始位置, 样片坐标系与世界坐标系重合, 此时有: α =β =γ =δ =0。 光源沿-
随后样品绕
由此确定BRDF测量的入射角, 并在随后的测量中, 保持入射角不变, 测量半球空间内的BRDF分布。
样片绕
样品坐标系经空间变换后, 在世界坐标系中用向量表示法如式(6), 式中表示坐标系的向量均为单位向量
入射光源
则机械臂-环轨在世界坐标系下的旋转角度到BRDF四角度的映射关系如式(9)— 式(12)
式(9)— 式(12)中, arctan(a, b)是指b/a的反正切。
基于机械臂的BRDF空间连续扫描示意图如图4所示, 其坐标系及BRDF角度与图1中完全一致。 在具体的BRDF测量中, 首先将机械臂的抓手空间位置降低, 使得机械臂和样片不遮挡入射光源, 调节探测器高度和其在环轨上的位置使入射光直接照射在探测系统上, 测量此时入射信号。 然后上升机械臂抓手, 使得入射光源照射在样片中心位置, 配合环轨旋转, 测量反射光强。 探测器接收到的入射或反射信号经放大电路放大, 由在数据采集卡采集后上传至上位机, 结合信号发生器的参考信号进行数字正交解调, 获得入射光功率Pi(θ i, θ r, λ )和反射光功率Pr(θ i, φ i, θ r, φ r, λ )。 在反射光测量过程中, 机械臂绕
在δ 扫描测量的方式中, 机械臂转动至各离散方位角处, 环轨连续转动获得BRDF沿天顶角方向连续扫描曲线。 样品运动到γ 2=(0, Δ γ , 2Δ γ , …, π )的位置保持静止, 旋转台带动探测器从反射天顶角θ r=90° (δ < 0)的位置连续运动到θ r=90° (δ > 0)的位置进行测量。 推导计算探测器运动的δ 角范围如下:
当探测器位于测量初始位置时, θ r=90° , 则有
由于探测的范围是BRDF的半球空间, 即探测器的转动范围要概括180° 的探测范围, 所以探测器转动的角度范围为
在γ 2扫描测量的方式下, 环轨转动至各离散天顶角处, 机械臂连续转动获得BRDF沿方位角方向连续扫描曲线。 旋转台带动探测器运动到δ =(0, Δ δ , 2Δ δ , …, π )的位置保持静止, 样品绕
通过入射信号和反射信号的测量以及信号处理模块的数据处理, 代入式(1)直接计算出BRDF。
 | 图4 基于机械臂的BRDF连续扫描方法示意图 (a): δ 连续扫描方式; (b): γ 2连续扫描方式Fig.4 Schematic of BRDF continuous scanning method based on robotic arms (a): δ continuous scanning mode; (b): γ 2 continuous scanning mode |
机械臂连续扫描的BRDF测量方法流程图如图5所示, 共分为4步, 具体如下:
 | 图5 基于机械臂的偏振BRDF连续扫描方法流程图Fig.5 Flowchart of polarized BRDF continuous scanning method based on robotic arms |
(1)系统初始化: 选择测量方式为δ 或γ 2连续扫描, 将机械臂和旋转台转至初始位置, 即α =β =γ =δ =0, 样品坐标系与世界坐标系重合, 偏振入射激光与-
(2)BRDF入射角调节: 将样片绕
(3)实现BRDF分布测量: 判断测量方式为δ 或γ 2连续扫描; 如果为δ 扫描, 机械臂分别转动至γ 2=(0, Δ γ , 2Δ γ , …, π )的位置保持静止, 旋转台带动探测器从反射天顶角θ r=-90° 的位置连续运动到θ r=90° 的位置进行测量实现连续扫描; 如果为γ 2扫描, 则旋转台带动探测器分别到δ =(0, Δ δ , 2Δ δ , …, π )的位置保持静止, 机械臂绕
(4)将探测值映射到BRDF半球空间, 实现BRDF完整测量。
以不锈钢SUS-314样片为例进行变温BRDF测量实验, 评价所提出偏振BRDF测量系统有效性。 分别使用80目和60目的砂纸均匀打磨被测样片, 使其表面粗糙度分布均匀, 测量前使用无水乙醇清洗样片。 打磨好的样片分别在27(常温)、 300、 500、 800和1 000 ℃的条件下测量P偏振态和S偏振态BRDF值, 样片在不同温度下的外观实物照片如图6所示。 样片从27 ℃升至300 ℃时, 由于样片发生氧化反应, 外观呈现浅褐色。 样片表面温度升至500 ℃时, 样片表面颜色进一步加深, 呈现灰褐色。 升至800与1 000 ℃时, 由于热辐射原因, 样片发红发亮。 在27 ℃条件下, 对SUS-314样片进行P偏振态和S偏振态下的三维BRDF测量, 对比不同偏振态下的BRDF峰值, 探讨探测器立体角对BRDF测量的影响。 在300、 500、 800和1 000 ℃的条件, 对比不同偏振态下BRDF随温度的变化规律, 探讨温度对偏振BRDF的影响。
 | 图6 不锈钢SUS-314样片控温至27~1 000 ℃的实物照片Fig.6 Photo of a stainless steel sample (SUS-314) at temperatures of 27~1 000 ℃ |
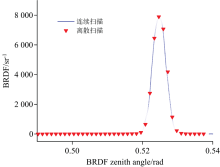
实验中首先对比离散与连续扫描测量两种测量方式。 在传统的离散测量中, 探测器在各离散角度处保持静止, 采集反射信号, 在测量完设定的反射天顶角范围内的反射信号后转动至下一个离散位置继续测量, 此方法能准确测量反射信号值, 但速度慢。 在连续测量中, 探测器匀速移动, 同时采集反射信号, 此方法速度快, 但对于SUS-314样片等镜面反射较强的材料, 连续扫描测量的分辨率是否能够分辨出准确的反射信号值存在疑问。 本文通过对比离散测量与连续测量的结果, 验证连续扫描测量方式对强镜面反射信号BRDF测量的有效性。 在固定方位角的条件下, 以θ i=0.52 rad入射为例, 在SUS-314样片的反射信号集中的0.506 rad≤ θ r≤ 0.541 rad范围内, 探测器分别以2.44× 10-4 rad· s-1匀速扫描测量和以间隔为0.001 74 rad离散测量, 测量结果如图7所示。 两种测量方式的测量结果吻合, 验证了连续扫描测量方式既可以分辨出镜面反射较强的SUS-314样片的真实反射信号, 又提高了测量速度。
 | 图7 S偏振态下的离散与连续扫描测量BRDF对比Fig.7 Comparison of discrete and continuous scanning measurements of the S-polarized BRDF |
在连续扫描测量过程中, 在27 ℃条件下对SUS-314样片的P偏振态和S偏振态三维BRDF进行测量, 并且分析不同偏振态与不同探测器立体角对BRDF测量的影响, 如图8所示。 由于镜面反射极强, 远离镜面反射位置信号几乎为0, 为更好展示BRDF镜面反射部分的分布, 绘制出镜面反射附近的BRDF分布, 具体为: 0.506 rad≤ θ r≤ 0.541 rad, 0 rad≤ ϕ r≤ 0.061 rad。 样片表面为27 ℃时, 以θ i=0.52 rad, ϕ i=0 rad, 的角度条件下为例, 在反射天顶角θ r方向上, 探测器以2.44× 10-4 rad· s-1的速度对反射信号进行匀速扫描测量。 在ϕ r方向上, 机械臂以1.74× 10-3 rad间隔携载样片转动。 按照δ 连续扫描模型对SUS-314样片进行三维空间的BRDF测量。 从BRDF分布中可以看出, 样片的镜面反射很强, 同时具有略微的漫反射。 在探测立体角为6.1× 10-6 sr时, P偏振态BRDF分布的峰值为5 229 sr-1, 如图8(a)所示。 在P偏振态下, 立体角分别为6.1× 10-6, 1.37× 10-5和3.81× 10-5 sr, 同理测量SUS-314样片的三维BRDF, 如图8(b), (c)和(d)所示, S偏振态下的BRDF峰值分别为5 229、 4 101和2 062 sr-1。 随着探测器立体角的增大, BRDF的峰值逐渐减小。 这是由于探测信号是立体角内的BRDF均值, 立体角越大, 空间滤波效果越强。 由于被测样片具有强反射特性增大立体角后, 峰值处的BRDF被更为宽范围的平均后, 峰值被拉低, 显现出更小的测量结果, 与BRDF理论测量模型相吻合。 因此, 在进行强镜面反射材料的BRDF测量时, 需要采用小立体角的探测, 本文后续探测立体角选择为6.1× 10-6 sr。
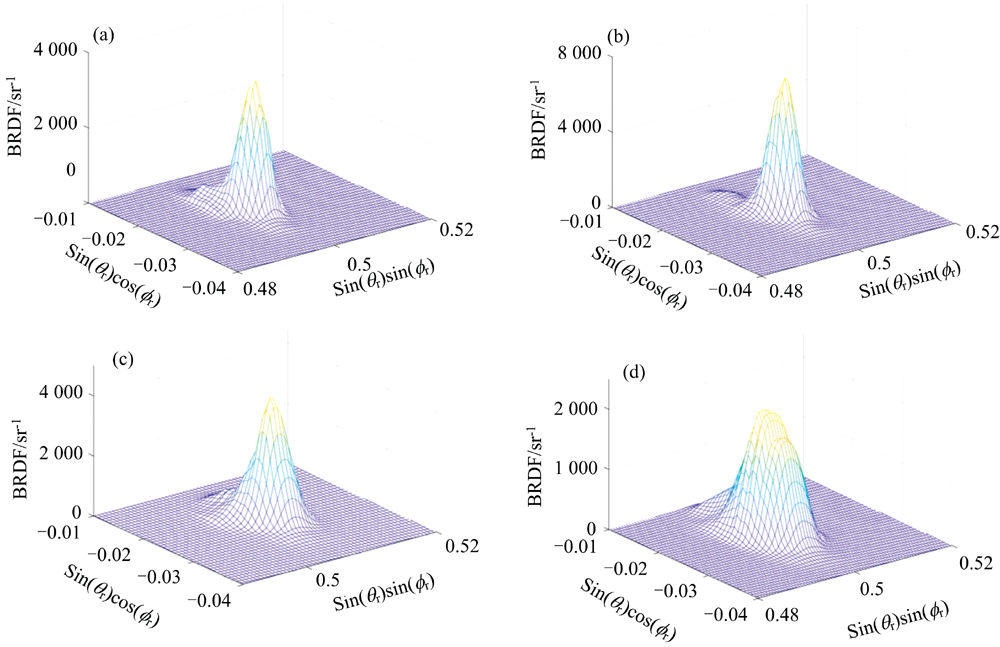 | 图8 偏振BRDF三维分布 (a): P偏振态, 立体角为6.1× 10-6 sr; (b): P偏振态, 立体角为6.1× 10-6 sr; (c): S偏振态, 立体角为1.37× 10-5 sr; (d): S偏振态, 立体角为3.81× 10-5 srFig.8 Polarized three-dimensional BRDF distributions (a): P polarization with a solid angle of 6.1× 10-6 sr; (b): S polarization with a solid angle of 6.1× 10-6 sr; (c): S polarization with a solid angle of 1.37× 10-5 sr; (d): S polarization with a solid angle of 3.81× 10-5 sr |
在方位角0 rad≤ ϕ r≤ 0.061 rad范围内机械臂以1.74× 10-3 rad间隔携载样片转动, 共扫描35组方位角, 在反射天顶角0.506 rad≤ θ r≤ 0.541 rad范围内, 探测器以2.44× 10-4 rad· s-1匀速扫描反射信号, 测量每组方位角上反射信号的时长约为163 s, 测量一组三维BRDF的时长约为1.5 h, 加热升温状态下, 样片的表面结构随着持续加热而实时改变, 测量三维BRDF的时长内BRDF可能发生改变, 所以加热升温条件下的BRDF只测量了单一方位角下的BRDF, 保证样片表面结构的变化不影响BRDF的测量。
在θ i=0.52 rad, 0.49 rad≤ θ r≤ 0.55 rad, ϕ i=0 rad, ϕ r=0.030 5 rad的角度条件下, 分别测量室温、 300、 500、 800和1 000 ℃条件下, 每个温度下的P偏振态和S偏振态BRDF各重复测量10次, 计算出每个温度下BRDF的平均值与标准差, 如图9所示。 不同温度下P偏振态下的BRDF如图9(a)所示, BRDF值随着温度的增加而减小, 从室温加热至300 ℃时, BRDF从4 026 sr-1剧烈减小至875 sr-1, 减小约78.2%。 从300 ℃升温至1 000 ℃, BRDF减小幅度较小, 从875 sr-1减小至209 sr-1, 减小约76.11%。 随着温度增加, BRDF峰值位置改变, 并且出现两个峰值。 不同温度下S偏振态下的BRDF如图9(b)所示, BRDF值随着温度的增加而减小, 从室温加热至300 ℃时, BRDF从5 229 sr-1剧烈减小至1 181 sr-1, 减小约77.4%。 从300 ℃升温至1 000 ℃, BRDF减小幅度较小, 从1 181 sr-1减小至246 sr-1, 减小约79.1%。 随着温度增加, 峰值位置与数量的改变同P偏振态。 综上, 在P和S偏振态下BRDF的值随着温度的增加而减小, 且随着温度的增加, 样片表面结构发生变化, 造成BRDF的峰值位置与数量发生改变, 且P和S偏振态下的BRDF值变化趋势表现出一致性。 P和S偏振态下不同温度BRDF的标准差范围分别为0.000 6~22.7 sr-1和0.006 3~12.6 sr-1, 计算得到的P偏振态和S偏振态下标准差相比于测量的BRDF平均值占比最大分别为0.56%和0.24%, 不同温度下BRDF测量重复性较好, 测量标准差明显小于不同温度下的BRDF值的变化, 说明不同温度下的BRDF值变化是由温度变化引起。
 | 图9 变温偏振BRDF测量结果, θ i=0.52 rad (a): P偏振态; (b): S偏振态; 实线为测量平均值, 阴影部分为标准差误差带Fig.9 Polarization BRDF Measurements at variable temperatures, θ i=0.52 rad (a): P polarization; (b): S polarization; The solid lines are the mean values of measurements and the shaded areas are the standard deviation error bands |
提出一种基于机械臂的偏振BRDF连续扫描方法, 构建机械臂-环轨转角到BRDF四角度之间的映射关系, 采用δ 或γ 2两种连续扫描方式, 实现红外偏振BRDF的快速测量。 在此基础上, 研制带有便携式高温加热模块的红外偏振BRDF测量系统, 温度调节范围为室温~1 000 ℃。 将系统应用于磨砂不锈钢样片测量。 通过对比传统离散测量方式和提出的连续测量方式, 验证了连续扫描测量方式同时提高了测量分辨率和测量速度。 利用连续测量方式对样片S和P偏振态进行三维BRDF分布测量, 两者分布较为一致。 由于空间滤波效应, 立体角大时BRDF峰值明显减小, 这与BRDF理论测量模型相吻合。 因此, 在进行强镜面反射材料的BRDF测量时, 需要尽量减小探测立体角。 最后, 将系统用于变温条件下的偏振BRDF测量, 测量标准差明显小于不同温度下的BRDF值的变化, 说明BRDF值变化是由温度变化引起。 由于表面氧化, 随着温度的升高, S和P偏振态下的BRDF值均减小, 两者变化表现出一致性。 未来, 研制系统可进一步用于不同材料的变温条件下红外偏振BRDF特性研究, 分析不同材料的BRDF随温度变化特性。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|