










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
LiJET光谱仪同步波长定标的精度分析
[王嘉琦1, 2  , 纪拓
, 纪拓4 , 常亮1, 2, 3, * ]
, 纪拓]
|
|


作者简介: 王嘉琦, 1994年生,中国科学院云南天文台博士研究生 e-mail: wangjiaqi@ynao.ac.cn
丽江2.4 m望远镜配备的LiJET光谱仪有两种观测模式: DFDI和DEM模式, 其中DEM模式可以进行同步定标观测。 目前同步定标技术是实现高精度视向速度测量的关键技术之一, 而要开展同步定标首先需要评估仪器自身的波长定标精度和仪器稳定情况。 由于数据处理软件和流程的不同, 极大可能造成数据处理结果的不同, 所以针对仪器开发标准化的数据处理程序十分的必要。 基于LiJET实测数据, 开发了一套针对LiJET的数据处理程序, 可以实现图像预处理、 光谱级次定位与抽谱等功能。 并根据不同精度的大气吸收线丛和钍氩灯标准谱作为参考谱, 得出LiJET-DEM模式的波长解和波长定标的精度。 而后又在典型的光谱级次使用碘吸收谱验证由钍氩灯得到的定标精度, 结果用钍氩灯谱和碘吸收谱独立得到的定标精度接近, 分别为3.3×10-4和4.2×10-4 nm。 接着也用同一典型光谱级次10 d的钍氩灯谱数据进行仪器稳定分析, 其仪器10 d的漂移结果稳定在3.7×10-5 nm, 换算成视向速度为19.8 m·s-1。
The LiJET spectrograph equipped with the Lijiang 2.4-meter telescope has two observation modes: DFDI and DEM mode, of which DEM mode can carry out simultaneous calibration observations. Simultaneously, calibration technology is one of the key technologies used to achieve high-precision radial velocity measurement. To carry out simultaneous calibration, it is necessary to evaluate the wavelength calibration accuracy and instrument stability. The difference in data processing software and processes is very likely to cause a difference in data processing results, so it is necessary to develop standardized data processing procedures for instruments. Based on the measured data of LiJET, a data processing program for LiJET is developed in this paper, which can realize the functions of image preprocessing, spectral order positioning, and spectrum extraction. The wavelength solution and wavelength calibration accuracy of the LiJET-DEM model are obtained by combining atmospheric absorption line cluster, thorium argon lamp spectrum, and other reference spectra. Iodine absorption spectra verify the calibration accuracy obtained by the thorium argon lamp at typical spectral orders. The calibration accuracy obtained by the thorium argon lamp and iodine absorption spectra is close, 3.3×10-4 and 4.2×10-4 nm, respectively. Then, the thorium argon lamp spectrum data of the same typical spectral order for 10 days was used for instrument stability analysis, and the drifting result of the instrument for 10 days was stable at 3.7×10-5 nm, which was converted to the radial velocity of 19.8 m·s-1.
随着天文学研究的不断深入, 天文学家对天文仪器的探测精度提出了更高的要求。 利用高色散光谱仪开展恒星视向速度测量在探测类地行星、 测量宇宙膨胀速度和研究恒星结构与演化等领域发挥了重要作用, 其视向速度测量精度要求达到10 cm· s-1甚至更小[1, 2, 3]。 由于这些学科发展的驱动, 催生出一批性能优秀的高色散光谱仪, 如欧洲南方天文台3.6 m望远镜配备的HARPS[4](High-Accuracy Radial-velocity Planetary Searcher)、 10 m Keck望远镜配备的HIRES[5](High Resolution Spectrograph), 8.2 m VLT(Very Large Telescope)配备的UVES(Ultraviolet and Visual Echelle Spectrograph )和ESPRESSO(Echelle Spectrograph for Rocky Exoplanet and Stable Spectroscopic Observations)[6]等。 国内已经正式投入观测的高色散光谱仪有3台, 分别是国家天文台兴隆观测站2.16 m望远镜的HRS[7](High Resolution Spectrograph)、 山东大学威海天文台1 m望远镜的WES[8](Weihai Echelle Spectrograph)、 云南天文台丽江天文观测站2.4 m望远镜的HIRES[9]。 这些高色散光谱仪的分辨率达到了几万甚至是十几万, 考虑到CCD的使用效率和波长覆盖范围, 都采用了交叉色散的光学设计方案, 结果落在CCD上的光谱级次达到几十到上百个。 原始的二维光谱数据需要经过图像预处理、 波长定标、 抽谱等步骤处理成可供科学分析的一维光谱数据。 其中, 波长定标精度是决定高色散光谱仪视向速度测量精度的重要因素之一, 通过比较星光谱线和定标谱线的位置, 需要找到波长解, 即从CCD上像素位置映射到波长的函数关系。
高色散光谱仪常用的波长定标源有大气吸收线[10]、 碘盒[11]、 钍氩灯[12]和激光频率梳[13]等。 大气吸收线可用于定标的谱线数量少, 但是其680和760 nm附近的吸收线丛特征明显, 比较容易证认; 碘盒中的碘蒸气吸收线虽多, 但是波长覆盖范围只在500~620 nm之间, 其他波段难以进行定标, 并且也会损耗星光的能量; 钍氩灯定标的最大优点在于光谱范围宽, 能覆盖310~4 800 nm, 在此范围内钍氩灯能提供5 000条定标谱线, 但其谱线分布不均匀且各谱线强度不一致。 如果要追求更高的波长定标精度, 可以选择激光频率梳或白光频率梳[14], 这两个定标源虽然对环境要求苛刻, 但其定标精度高, 适合分辨率更高的光谱仪。 除了根据实际情况选择合适的定标源, 定标方法也十分重要。 常规定标方法是在观测过程中定标谱线和星光谱线交替拍摄, 如果仪器稳定性不高会影响视向速度的测量精度, 且浪费观测时间。
目前, 国家天文台兴隆观测站2.16 m望远镜的HRS已经升级为采用激光频率梳为波长定标的同步定标方式, 云南天文台丽江天文观测站2.4 m望远镜的LiJET(LiJiang Exoplanet Tracker)采用钍氩灯和碘吸收线相结合的方法进行同步定标, 该设备尚未正式投入使用。 本文基于LiJET试观测数据, 对LiJET-DEM(Direct Echelle Mode)模式的同步定标数据进行处理和分析, 为DEM模式投入常规观测提供技术支持。
LiJET有两种工作模式, 一种是DFDI(Dispersed Fixed-Delay Interferometry)模式, 采用非同步定标方式, 王晓丽等已经对DFDI数据处理方法做过研究[15]。 另一种模式是DEM模式, 该模式采用双光纤设计, 可以同时观测目标光谱和定标光谱。 DEM模式由四个子系统组成, 分别为导星系统、 光谱仪、 定标单元和恒温恒压系统。 其中, 恒温系统采用三层温度控制, 在仪器不同位置共安装了24个温度探测器和15个加热片, 温度设定值为25 ℃, 长期温度变化目标为± 0.001 ℃。 恒压系统采用仪器密封充高压干净空气控制, 仪器内部压强略高于大气压, 其设定值为10.9 Psi, 长期压强变化目标为± 0.001 Psi。 其光路图如图1所示, 主要技术参数见表1。
 | 图1 DEM模式光路图Fig.1 Optical path of DEM |
| 表1 DEM模式参数 Table 1 The parameters of DEM |
开展同步定标需要利用钍氩灯一维光谱给出波长定标解, 通过交叉相关评估系统稳定性测量波长解的长期漂移。 目前IRAF是天文观测中比较常用的原始数据处理软件, 但是需要用户手动设置复杂的参数, 对于在CCD相机边缘的光谱级次, 由于其效率低, 追迹的时候经常会丢失相应的光谱级。 由于IRAF需要过多的人为介入, 会导致同样观测目标在不同望远镜上的数据处理结果存在差异, 甚至对于同一望远镜相同的观测数据, 不同处理者之间也会存在差别[16]。 针对高分辨率光谱仪, 官方或者经验丰富的第三方用户会提供具有针对性的数据处理软件, 如在EsoRex框架下, 欧洲南方天文台开发了针对X-SHOOTER、 UVES和ESPRESSO等设备的数据处理软件, 加州大学Prochaska教授针对近红外光谱仪P200/TripleSpec开发了XIDL/HIRedux[17]和Pypelt[18]数据处理软件包并应用在数据处理软件Spextool[19]中。 这些程序不仅方便了数据使用, 且保证了数据结果的一致性。 本文利用DEM连续10天的试观测数据, 基于python实现了对DEM模式数据的预处理、 光谱级次精确定位和特定光谱级抽取等功能。 图2为目标星HD89269同步定标原始数据的局部图像。
 | 图2 HD89269同步定标原始图像(局部) 连续光谱为恒星光谱, 点状谱线为钍氩灯光谱Fig.2 Original image (local) of simultaneous calibration observation of HD 89269 The continuous spectrum is the stellar spectrum and the dot spectral line is the thorium argon lamp emission line spectrum |
光谱图像预处理是处理原始数据的重要步骤, 本步骤还需要本底数据(bias)、 暗场数据(dark)和平场数据(flat)各十张左右。 计算方法如式(1)所示
式(1)中, Image'为预处理后的数据, Image为原始数据, 其曝光时间为tI; Flat为平场数据, 其均值为
光谱级次的准确定位是后续光谱抽取和波长定标等操作的基础, 其基本思路是利用平场数据构造一幅由光谱边缘轮廓确定的光谱模板二值图, 再进行对特定光谱级次进行光谱抽取, 抽谱后的某一特定级次光谱等效于一个独立的长缝光谱。
对预处理后的二维光谱沿着交叉色散方向切成4 096条切片, 利用寻峰算法找到每一切片上每个光谱级次的峰值, 分别对某一光谱级次上所有峰值坐标信息进行多项式拟合, 再上下平移拟合曲线到这一光谱级次的边缘, 获得该光谱级次的轮廓。 期间要用到图像处理形态学中的膨胀、 阈值切割和连通域等算法来去除错误的峰值信息, 同时可以得到拟合曲线平移的位置信息。
由上面得到的每一条光谱级次的边缘信息, 可以构造一幅包含所有光谱边缘轮廓的二值化光谱模板图, 用此模板乘以预处理后的二维光谱, 并结合连通域算法可以方便地抽取出特定的光谱级次。 把抽取出的光谱级次直接在交叉色散方向进行叠加, 得到特定光谱级次的一维光谱图, 图3为光谱的抽谱流程。 DEM光谱级次的设计值是31级(从21级到51级), 抽取结果一共获得33个光谱级次, 抽取到的光谱级次满足设计要求。 得到的一维光谱横坐标是像素值, 还需要进行波长定标把像素值换算成可用于科学分析的波长信息。
 | 图3 光谱抽谱流程图 (a): 预处理后的二维目标星谱; (b): 光谱级次模板二值图; (c): 抽取到的某一指定级次的光谱; (d): 抽取到的某一光谱级次沿着交叉色散方向叠加后的一维光谱图Fig.3 Schematic diagram of the spectrum extraction process (a): The pre-processed two-dimensional target star spectrum; (b): The spectral order template binary diagram; (c): The extracted spectrum of a specified order, (d): The one-dimensional spectrum of an extracted spectral order superimposed along the cross-dispersion direction |
波长定标的过程就是找到波长解。 DEM模式主要采用钍氩灯作为定标光源, 通过认证单幅图中各光谱级次上的钍氩灯谱线, 找到CCD上的像素位置和谱线波长对应关系, 并进行多项式拟合。 通常要求认证出的谱线在该光谱级上分布均匀, 且谱线数量尽可能多, 精细的波长定标对后期的数据处理至关重要。
针对不同批次的钍氩灯, 由于电压或者杂质(Mg、 Ca、 Na、 Fe等)等因素, 会导致每盏钍氩灯个别谱线不一致, 可能认错发射线而影响定标精度。 针对这种情况, 首先从目标星谱中找到一些具有特征结构的大气吸收线与其他已经做过波长定标的光谱仪所拍摄的目标星谱进行对比, 求解出这一级次的波长解, 然后用该级次波长解代入到钍氩灯谱, 当作这一级次的初始波长定标, 再与标准钍氩灯谱进行对比获得该级次的精细波长定标。
光学波段大气吸收谱中有几个比较明显的宽吸收带特征, 非常容易在原始观测数据中找到, 主要包括臭氧的Huggins吸收带(λ ~400 nm)和Chappuis吸收带(500 nm< λ < 700 nm), 还包括相对稍窄的氧吸收带。 对于氧吸收带, A、 B带(759 nm< λ < 772 nm, 686 nm< λ < 695 nm)的吸收谱线比较显著, 而γ 带(628 nm< λ < 634 nm)吸收谱线比较弱[20]。 DEM模式的初始波长定标是利用X-Shooter光谱仪和UVES光谱仪的大气吸收线作为参考, 并与DEM光谱中的大气吸收线进行对比, 获得光谱级次和色散方向信息以及波长定标的初始结果。
由DEM模式设计指标可知, 氧的A、 B吸收带应分别落在DEM模式的第27级和30级上, 对比在第2节中抽取星光谱线的33个光谱级次, 定位出A、 B吸收带所在的级次。 通过与X-Shooter光谱仪的实测数据作对比分析, 可以快速确定含有结构特征的大气吸收线位置。 虽然X-Shooter光谱仪分辨率只有5 500, 但其光谱数据保留了足够数量的大气吸收线细节特征。 如图4展示了DEM第27级光谱与X-Shooter光谱仪氧A带的吸收谱线, 可以确定DEM单级蓝端谱线位置。 在实际操作中, 通过目视对比, 将两条光谱中分立的大气吸收线一一对应, 可以得到各吸收线线心的像素值和波长值。 同样, 比较第30级与X-Shooter光谱仪上B带的吸收谱线, 通过低阶多项式拟合, 可以得到这两个光谱级的初始波长解。
 | 图4 X-Shooter光谱仪大气吸收谱和未做波长定标的DEM模式的大气吸收谱对比 (a): X-Shooter光谱仪确定的两处大气氧气特征吸收线; (b): X-Shooter光谱仪氧气A带吸收线的放大细节图; (c): DEM模式拍摄的27级光谱级次的吸收谱, 其光谱结构特征与图(b)红蓝端相反Fig.4 Comparison of X-Shooter telluric lines to DEM mode without wavelength calibration (a): The X-Shooter telluric lines; (b): The enlarged diagram for A band; (c): The DEM telluric lines at A band, its spectral structure features are opposite to the red and blue end of (b) |
利用该初始波长解和分辨率高于DEM模式的UVES光谱仪(R~100 000)的星光谱线作为标准谱, 对DEM第27级和第30级的初始波长定标结果进行优化。 UVES的高分辨率可以提供更加细致的吸收线特征, 这样可以提高这两个光谱级次的波长定标精度, 定标结果如图5所示。 根据这两个级次的波长解和光栅方程可以计算出从第20级到第52级的波长解。 图6展示了DEM实际定位的33个光谱级次在CCD上的位置。
 | 图5 DEM与UVES拍摄同一大气吸收线并定标后的对比图 橙色是UVES拍摄的氧气吸收线, 蓝色是DEM拍摄的第27级氧气吸收线, 对比发现吸收线吻合的比较好Fig.5 Comparison of the same atmospheric absorption line captured by DEM and UVES after wavelength calibration Orange is oxygen absorption lines of UVES, and blue is DEM order 27 spectrum, and the absorption lines fits well |
 | 图6 DEM各个光谱级次在CCD上的位置及光谱色散方向 右边显示的是所确定的各光谱级次的边缘轮廓线和原始光谱对比的细节放大图Fig.6 The position of each spectral order of DEM on CCD and the spectral dispersion direction The right is a detailed comparison information for original spectrum and fitted edge contours |
利用上文中DEM星光谱线的波长解作为同步定标通道钍氩灯的初始波长定位的参考, 并利用已知的钍氩灯标准谱对定标通道进行精细波长定标。 我们所使用的钍氩灯标准谱是UVES光谱仪的定标光谱, 国际上多数高色散光谱仪都用此光谱仪的定标光谱作为标准谱[21], 其灯谱波长范围为303.3~1 053.8 nm。 逐个找到DEM灯谱特定发射线在CCD上的位置并通过高斯拟合得出精确的发射线位置坐标, 从标准谱中证认出对应的发射线并得到其波长, 用逐阶增高的低阶多项式拟合像素位置和波长的关系, 评估所需要的多项式阶数和相应的多项式系数, 得到钍氩灯谱在这一级次的精细波长定标。
选择的每一光谱级次定标的发射线, 间距尽可能的均匀且信噪比高。 对于第36级选择了12根发射线, 并根据发射线所对应的坐标信息和波长信息分别进行了一次、 二次、 三次、 四次和五次多项式拟合, 其拟合结果的残差的RMS分别是: 0.221 37、 4.096× 10-3、 1.377× 10-3、 3.3× 10-4和2.3× 10-4 nm, 可以看出采用四次、 五次多项式拟合残差值已经相差不大, 也为了防止过拟合, 所以将四次多项式作为拟合函数。
为了展示其定标结果, 这里分别选取几个光谱级次查看定标情况, 其定标结果如图7所示。 从这几个光谱级次的细节放大图可以看出, DEM和UVES的灯谱主要谱线对应结果很好, 仅有部分谱线没有对应上。 其原因主要有两点, 一是两台光谱仪钍氩灯的电压和灯内杂质存在差异, 二是两台光谱仪分辨率不同, UVES光谱仪分辨率更高, 会获得更多的谱线。
 | 图7 DEM光谱仪定标结果与UVES光谱仪定标结果对比图 (a), (b), (c)分别是DEM的第20级、 第34级和第51级灯谱发射线与UVES光谱仪定标结果对比; (d), (e), (f)是局部放大图Fig.7 Comparison of calibration results of DEM and UVES (a), (b) and (c) are the 20, 34 and 51 order of DEM spectral emission lines compared with the UVES; (d), (e), and (f) are local magnification images |
平场灯或者星光通过碘盒后会得到碘蒸气吸收谱, 碘蒸气在500~620 nm范围内有密集的吸收线。 通过比较碘吸收谱和其参考谱, 也可得到仪器的波长定标解。 碘吸收线参考谱通常使用傅里叶变换光谱仪获得, 其分辨率显著高于当前望远镜上的光谱仪, 可以达到数十万。 DEM的碘盒放置于定标单元中, 碘蒸气是由固态碘加热到50 ℃获得。 碘蒸气光路与钍氩灯光路使用相同的定标光纤, 可以在软件中自动切换。 这里使用VLT-UVES的归一化的碘盒吸收谱(http://www.eso.org/sci/facilities/paranal/instruments/uves/tools.html)作为碘参考谱。 该光谱使用FTS观测, 分辨率为R≈ 800 000, 波长覆盖为500~666.7 nm。
 | 图8 利用碘吸收谱检查波长定标精度的示例 黑色为DEM平场光路的归一化碘吸收谱, 蓝色为VLT-FTS的高分辨率碘吸收模板, 绿色为拟合曲线Fig.8 An example of checking the accuracy of wavelength calibration by iodine absorption lines Black is the normalized iodine absorption lines of the DEM, blue is the high-resolution iodine absorption lines template of VLT-FTS, and green is the fitting curve |
使用相同曝光时间(无碘盒)的纯平场谱来归一化碘吸收谱, 通常把归一化后的碘吸收谱分成0.5 nm宽的光谱小段。 将参考谱与仪器轮廓卷积并平移来拟合观测谱, 逐段测量钍氩灯波长定标解与参考谱的波长移动。 对第36级中的一个光谱段的拟合结果如图9所示。
 | 图9 第36级光谱每0.5 nm与参考谱的位移量 两条红色虚线覆盖的波长范围是设计的工作波长Fig.9 The displacement of the order 36 every 0.5 nm with the reference spectrum The wavelength range covered by the two red dashed lines is the designed work wavelength |
由于把碘吸收谱每0.5 nm与参考谱做一次对比, 这里就用每一次对比后得到的位移量来评估整段光谱级次的波长定标精度, 第36级每0.5 nm宽的小段光谱的位移量如图10所示。 第36级实际设计工作波段为561~576 nm, 只覆盖CCD中间约三分之二的像素, 剩余两边的位置由于谱线信噪比较低, 不用来做光谱定标。 这里可以得到第36级在工作波段内的波长定标精度为4.2× 10-4 nm, 与钍氩灯定标结果基本一致。
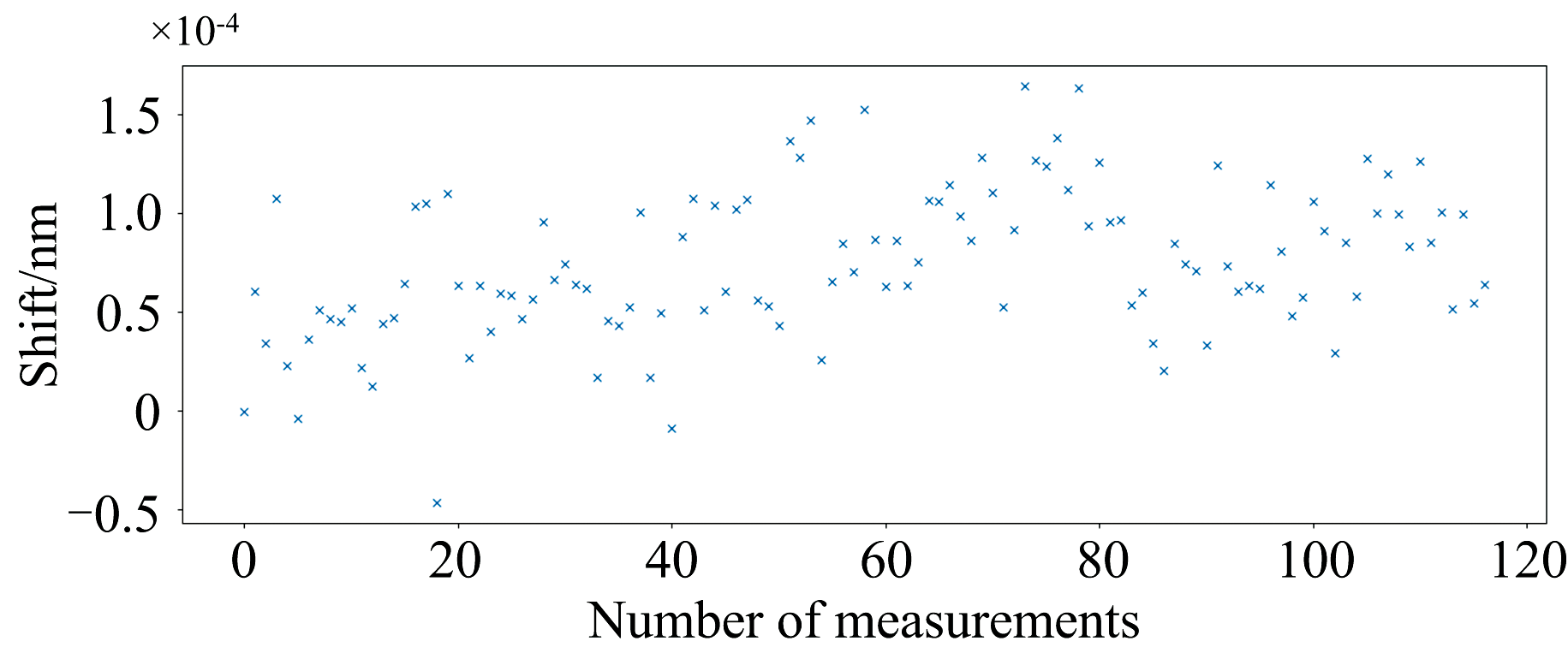 | 图10 在10 d内117张谱线的相对漂移情况Fig.10 The relative drift of 117 spectral lines over 10 days |
对于视向速度测量来说, 光谱仪的长期稳定性十分重要, 我们利用DEM定标谱线在10 d内的漂移情况对仪器稳定性进行了分析。 10 d内共拍摄了117张钍氩灯谱, 以第一张灯谱为初始零点灯谱, 这里利用谱线较多的第36级光谱的漂移情况来反应光谱仪的稳定性, 对以后的每张灯谱的第36级光谱使用交叉相关的方法计算谱线漂移量。 10天内117张灯谱的相对漂移量的标准差为3.7× 10-5 nm, 换算成视向速度为19.8 m· s-1; 并通过漂移量的最大值与最小值之差的二分之一计算这段时间内的最大偏差, 其结果为1.05× 10-4 nm, 换算成视向速度为55.4 m· s-1。 在实际测试中漂移量的最大值与最小值多出现在白天仪器非观测的时间段内, 所以通常使用漂移量的标准差来衡量仪器在工作时间段内的稳定性, 这段时间内的漂移量如图10所示。 图11显示的是这10 d内光谱仪温度和压强的变化情况。
 | 图11 仪器温度和压强稳定性Fig.11 The stability of temperature and pressure |
介绍了LiJET光谱仪DEM模式的波长定标方法, 开发了一套基于python的自动抽谱程序, 可实现图像预处理、 光谱级次的精确定位、 特定光谱的抽取以及谱线波长定标等功能, 并通过碘吸收谱对个别光谱级次定标精度进行了验证。 对于第36级, 其单幅图钍氩灯定标的精度为3.3× 10-4 nm, 碘吸收谱定标精度为4.2× 10-4 nm, 两者基本一致。 10 d内仪器的漂移结果稳定在3.7× 10-5 nm, 换算成视向速度为19.8 m· s-1。
对实测数据的分析和研究能促使我们进一步思考和理解LiJET光谱仪的硬件设计和未来的优化方案, 对于LiJET尽快投入到常规观测中具有重要的促进作用。 例如, 可以安装倾斜镜提高星光耦合效率; 研制光纤扰频装置改善光纤出射端成像质量; 像Keck-HIRES和VLT-UVES等设备一样, 在光纤光路中加入碘盒直接获得含有碘吸收线的星光光谱等。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|