









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
无人机载快照式计算光谱偏振一体化成像方法设计与研究
[柳祎 , 张学敏, 俞越, 赵海博, 刘彦丽, 任维贺, 郑国宪]
, 张学敏, 俞越, 赵海博, 刘彦丽, 任维贺, 郑国宪]
, 张学敏, 俞越, 赵海博, 刘彦丽, 任维贺, 郑国宪]
|
|


作者简介: 柳 祎,女, 1995年生,北京空间机电研究所工程师 e-mail: 452414737@qq.com
目标探测识别技术在遥感领域发挥着重要作用。 光谱偏振成像技术在获取目标物二维图像信息的同时, 还可以获得目标的光谱信息及偏振信息, 具备分辨“同谱异物”、 实现“凸显目标”、 “识别真伪”的能力, 提高复杂背景环境下的目标探测识别概率。 目前的偏振光谱成像系统存在诸多缺点, 如结构复杂、 体积重量大、 无法实时成像等。 针对上述问题, 提出一种快照式计算光谱偏振一体化成像方法。 采用偏振通道与光谱通道共用主光路, 利用分光棱镜分成偏振通道和光谱通道, 偏振通道直接成像, 光谱通道由编码板、 阿米西棱镜、 准直系统组成, 利用远心光路提升系统成像质量。 对光学系统及分光元件进行设计与优化, 实现了光谱信息与偏振信息实时同步获取。 基于上述技术路线进行了原理样机集成, 在实验室暗室内对样机进行指标测试, 最终指标为: 工作波段: 400~900 nm, 成像分辨率: 0.1 m, 视场角: 29.09°, 光谱分辨率: 10 nm, 样机重量: 2.75 kg。 在室外进行航飞实时成像试验, 获取了地物不同目标偏振态图像和光谱曲线, 成像效果良好, 满足预期目标。 该方法弥补了传统方法的缺点, 为快照式偏振光谱多维信息获取提供了一种新型有效的技术手段。
Target detection and recognition technology play an important role in the field of remote sensing. Spectral polarization imaging technology not only obtains the two-dimensional image information of the target, but also obtains the spectral information and polarization information of the target, which can distinguish “different objects with the same spectrum,” highlight the target, “identify the authenticity”, and improve the detection and recognition probability of the target in the complex background environment. The current polarization spectroscopy imaging system has many drawbacks, such as a complex structure, a large volume and weight, and an inability to image in real time. To solve these problems, an integrated imaging method based on snapshot calculation of spectral polarization is proposed. The main optical path is shared between the polarization channel and the spectral channel, and the beam splitter prism is used to divide the polarization channel and the spectral channel. The polarization channel is directly imaging, and the spectral channel is composed of the coding plate, Amici prism, and collimation system. By utilizing the telecentric optical path to enhance the imaging quality of the system, the optical system and spectral elements were designed and optimized to achieve real-time synchronous acquisition of spectral and polarization information. Based on the above technical route, the principal prototype is integrated, and the prototype is tested in the laboratory darkroom. The final indicators are: working band: 400~900 nm, imaging resolution: 0.1 m, field of view: 29.09°, spectral resolution: 10 nm, prototype weight: 2.75 kg. The real-time imaging test was carried out outdoors, and the polarization state images and spectral curves of different ground objects were obtained. The imaging effect was good, meeting the expected target. This method compensates for the shortcomings of traditional methods and provides a new and effective technical means for obtaining multidimensional information in snapshot polarization spectra.
偏振光谱成像技术自20世纪末诞生以来, 受到人们的广泛关注, 相关研究不断深入, 工程化应用逐渐普及, 被广泛应用于大气、 海洋、 空间、 农业、 医学、 军事等领域[1, 2, 3]。 随着技术发展, 偏振光谱成像系统逐渐趋于小型化, 偏振光谱等多维信息的同步实时获取与系统轻小型化结合具有重要意义。 目前, 偏振光谱成像系统多采用色散分光、 干涉调制、 线性滤光片等作为光谱信息获取途径。 色散分光原理相对简单, 但系统一般体积重量大, 干涉方法系统较复杂, 降低分辨率, 线性滤光片方法对环境要求较高, 应用领域受限, 且传统系统无法同时兼具同步实时成像和轻小型两个应用需求[4, 5, 6, 7, 8]。
针对传统方法的缺点, 提出了快照式计算光谱偏振一体化成像方法。 采用偏振通道与光谱通道共用主光路, 利用分光棱镜分成偏振通道和光谱通道, 光谱通道采用基于编码孔径的方法获取光谱信息, 完成原理样机研制, 并进行航飞试验, 实现了多维数据的同步实时有效获取, 突破了现有技术手段缺点, 具有结构紧凑、 重量轻、 稳定性高、 多场景应用、 重构简单和多维信息同步实时获取的优点。
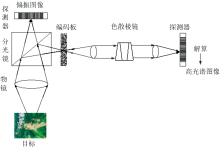
提出了一种将分焦平面式偏振成像体制和计算光谱成像体制相结合的成像方式, 实现对同一场景偏振和光谱的同时成像。 图1为计算光谱偏振一体化成像系统设计方案。
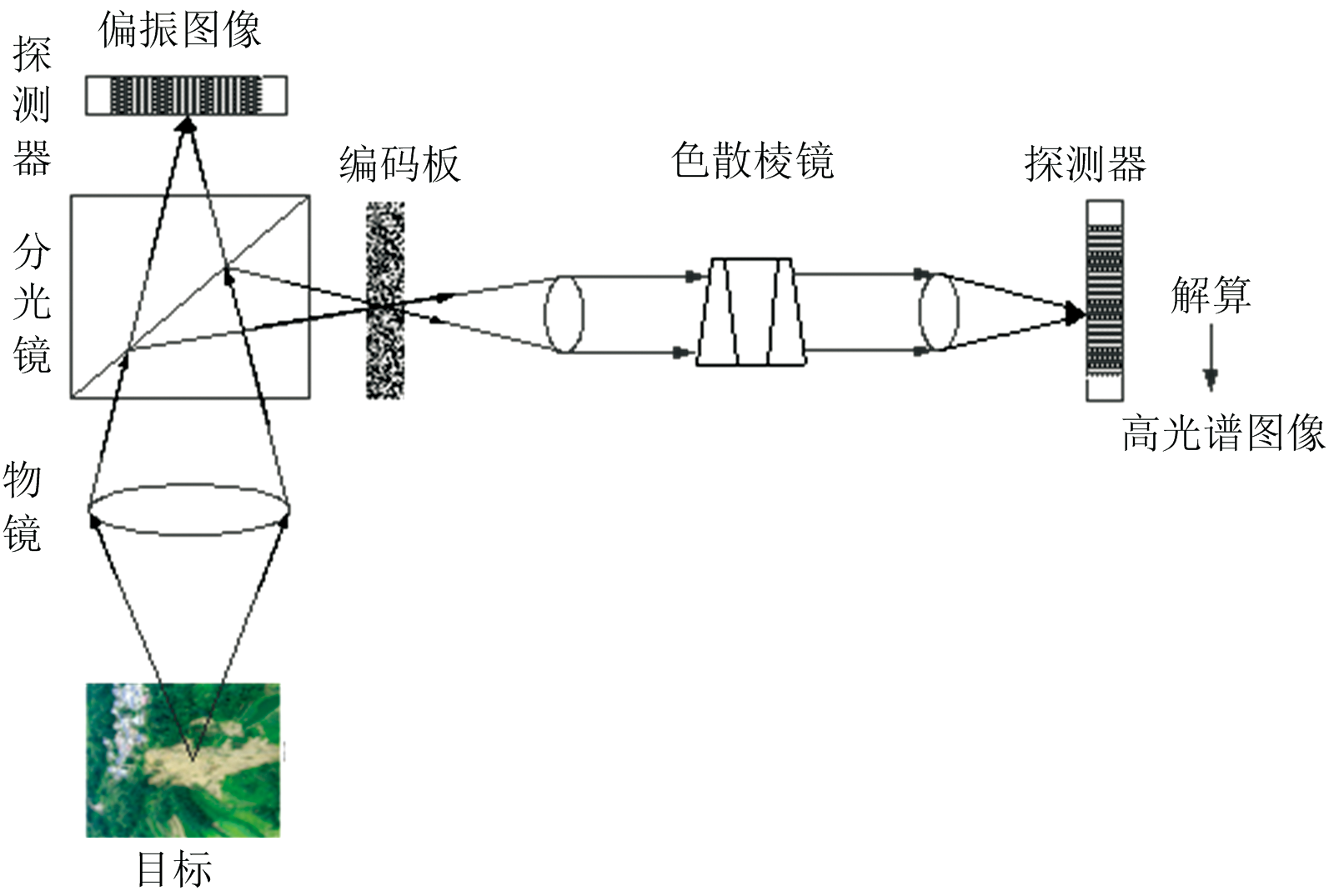 | 图1 计算光谱偏振一体化成像系统设计方案Fig.1 Design scheme for integrated spectral polarization imaging system |
通过前置物镜完成能量收集, 汇聚景物, 然后通过分光棱镜将入射光分别分到偏振通道和光谱通道。 偏振通道光束直接聚焦到偏振探测器上。 光谱通道光束在编码板上形成一次像后经过编码调制和色散分光后被探测器接收, 进行计算成像重构复原, 得到三维光谱数据立方体。
分焦平面式偏振成像原理如图2所示, 将微偏振光学元件直接附在探测器的焦平面阵列上, 在相邻四个像元上有着四个不同方向(0° 、 45° 、 90° 、 135° )的微偏振片, 单次曝光即可获得入射光的线偏振信息。 计算光谱成像原理如图3所示, 入射光通过编码模板的调制, 其空间采样发生变化。 在玻璃基体材料上制作各种功能图形并精确定位, 无驱动装置, 直接实现振幅调制, 其优点是设备轻巧, 光路装调相对简单。 系统采用的探测器技术参数如表2。
 | 图2 分焦平面式偏振成像原理Fig.2 Principle of focal plane polarization imaging |
 | 图3 计算光谱成像原理Fig.3 Principle of computational spectral imaging |
| 表2 探测器单元技术参数 Table 2 Technical parameters of detector unit |
根据系统要求, 地面分辨率不小于0.1 m@1 km, 相机地面分辨率与焦距、 探测器像元尺寸、 无人机高度有关, 具体计算公式: GSD=p/f× H, 其中, GSD为地面像元分辨率, p为像元尺寸或采样间距, f为相机焦距, H为飞行高度, 由于选用的探测器像元尺寸为3.45 μ m× 3.45 μ m, 通过计算光学系统焦距为34.5 mm, 可以实现0.1 m@1 km地面分辨率。 若艾里斑半径恰好为一个像元大小, 即: p=ra=1.22λ F, 其中, p为一个像元大小, λ 为中心波长, 取λ =0.632 8 μ m, 得到系统F数为4.46, 则系统口径D=7.73 mm, 考虑视场遮拦和能量问题, 将实际口径增加至D=10 mm, 则实际系统F数为3.45。 探测器像素尺寸为4 096× 3 000, 系统的物方视场角根据公式计算: FOV=2arctan(L/2f), 其中, L为探测器对角线长度, 求得物方视场角为29.09° , 满足系统对视场角的要求, 为了满足成像质量要求, 物方视场角设计值为26.24° , 依然满足系统要求。 表3为光学系统设计参数。
| 表3 光学系统设计指标 Table 3 Design index of optical system |
根据系统总体参数要求对光学系统进行设计, 采用透射式光学系统形式, 光谱通道与偏振通道共口径, 利用分光棱镜实现光谱通道和偏振通道的分离, 利用阿米西棱镜实现光谱的色散, 系统外形尺寸约为151.3 mm× 103.9 mm× 26.8 mm, 光学系统构型图如图4所示。
 | 图4 光学系统构型图 (a): 整体构型图; (b): 光谱通道构型图; (c): 偏振通道构型图Fig.4 Configuration diagram of the optical system (a): Overall configuration diagram; (b): Configuration diagram of the spectral channel; (c): Configuration diagram of the polarization channel |
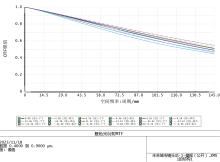
光谱通道光学系统成像性能如图5所示。 在奈奎斯特频率处全视场、 全谱段平均传函为0.485@145 lp· mm-1, 满足系统要求。
 | 图5 光谱通道MTF曲线图 (a): 400 nm; (b): 500 nm; (c): 600 nm; (d): 700 nm; (e): 800 nm; (f): 900 nmFig.5 MTF curves of the spectral channel (a): 400 nm; (b): 500 nm; (c): 600 nm; (d): 700 nm; (e): 800 nm; (f): 900 nm |
偏振通道光学系统成像性能如图6所示。 在奈奎斯特频率处全视场、 全谱段平均传函为0.493@145 lp· mm-1, 满足系统要求。
 | 图6 偏振通道MTF曲线图Fig.6 MTF curves of the polarization channel |
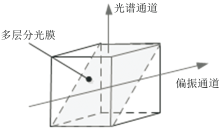
为保证偏振通道的保偏性能, 偏振光路选择直接透射成像, 将光谱光路向上折转。 分光棱镜示意图如图7所示, 性能参数如表4所示。
 | 图7 分光棱镜示意图Fig.7 Schematic diagram of the beamsplitter prism |
| 表4 分光棱镜性能参数 Table 4 Parameters of the beamsplitter prism |
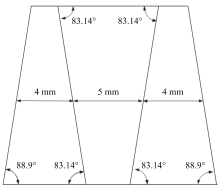
阿米西棱镜是一种由三个棱镜构成的对称结构, 第一块透镜为冕牌玻璃、 第二块为高色散的火石玻璃, 第三块玻璃材料与第一块一致, 平行光线经过该棱镜结构能够增加光线的色散角度, 且能够平行出射, 其特点是出射方向和入射方向一致, 光路不会发生偏折, 有利于系统的设计和装调。 阿米西棱镜设计图如图8所示, 性能参数如表5所示。
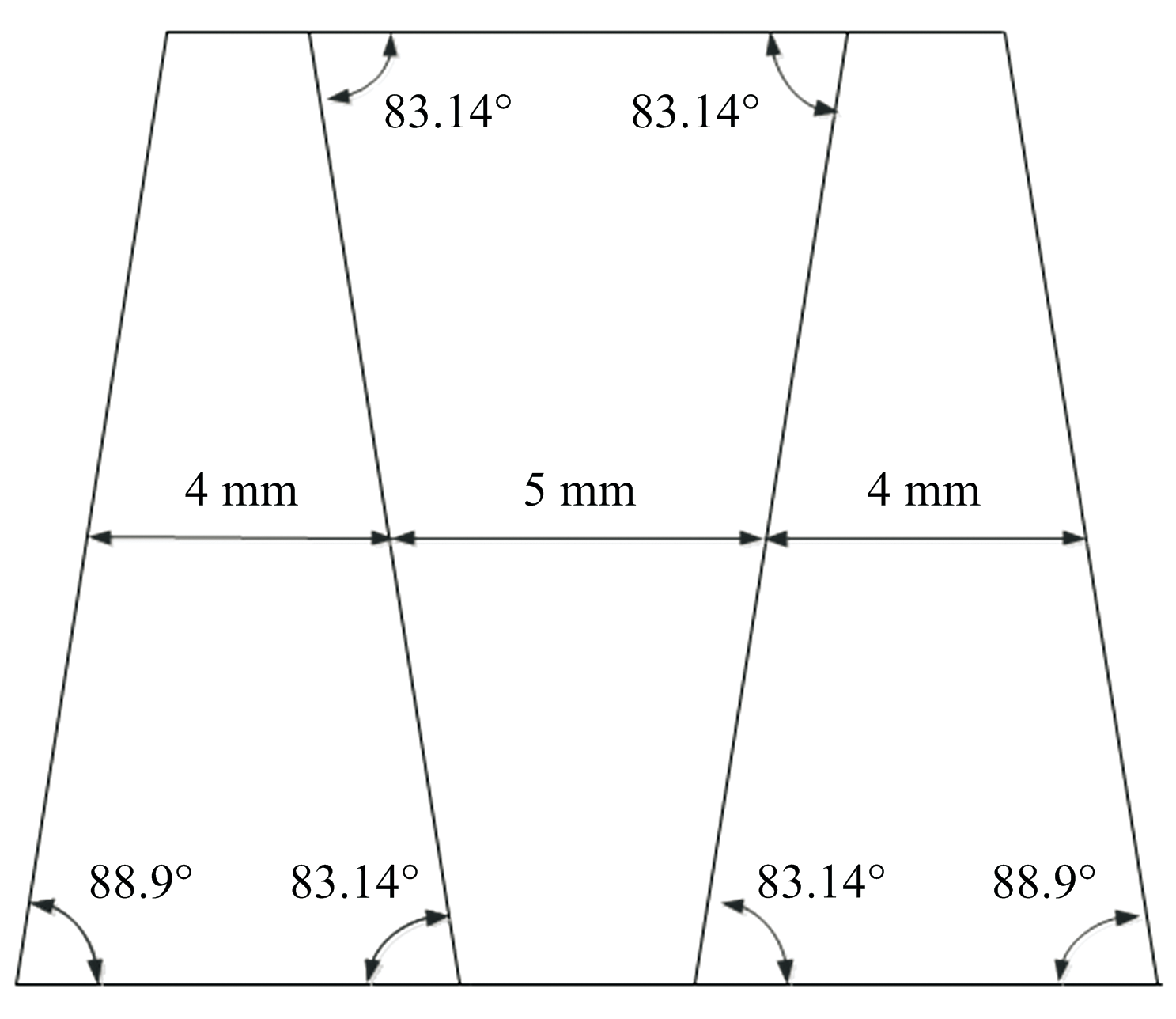 | 图8 阿米西棱镜设计图Fig.8 Design drawing of amisi prism |
| 表5 阿米西棱镜性能参数 Table 5 Parameters of the amici prism |
编码模板采用二值随机函数, 对于该函数, 可以通过MATLAB函数随机生成, 编码板设计图如图9所示, 性能参数如表6所示。
 | 图9 光刻编码板示意图Fig.9 Schematic diagram of the coding plate |
| 表6 编码板性能参数 Table 6 Parameters of the coding plate |
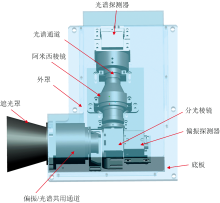
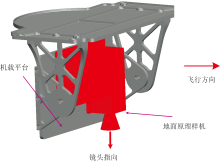
光学成像组件包含光谱和偏振通道的成像透镜组件、 分光棱镜组件和阿米西棱镜组件等组成, 各组件集成后安装于主承力底板上。 样机各部组件外形示意图如图10所示。 所有透镜组均安装在镜筒内部, 镜筒与底板通过支架进行固定和连接。 分光棱镜设计独立镜壳, 与透镜组件通过安装孔, 并采用高精密配合方式来保证光轴精度。 阿米西棱镜采用独立镜壳进行设计, 镜壳内方外圆, 内部方形空间通过粘接方式固定阿米西棱镜, 外部圆形接口与前后镜组进行匹配连接, 通过安装支架与底板进行连接固定。 样机安装在机载平台底部, 通过底板的6个螺钉与机载平台连接, 镜头指向和飞机飞行方向如图11所示。
 | 图10 样机各部组件外形示意图Fig.10 Schematic diagram of the prototype components outline |
 | 图11 样机与机载平台的安装方式Fig.11 The installation method of prototype and UAV-borne platform |
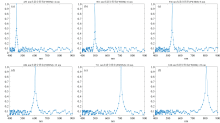
采用标定过的型号为BP3204-21的标准单色仪, 输出波长400~1 050 nm。 参考GB/T 13966— 2013分析仪器术语, 将光源放置在单色仪入光口处, 调整原理样机位置, 对准光路, 使单色仪输出单色准直光; 选择合适的参数以及光源的功率值, 使编码板在焦面上成清晰的编码图像; 控制单色仪在400~900 nm范围内的53个谱段输出单色光束, 利用原理样机进行重构; 利用软件进行计算得到中心波长、 半高宽(FWHM)以及仪器响应函数曲线。 测试数据如图12和表7所示, 原理样机对单色仪400~900 nm范围内的53个谱段进行成像和重构, 重构出的光谱曲线平均半高宽FWHM为9.68 nm, 在光谱范围内平均光谱分辨率为9.68 nm。
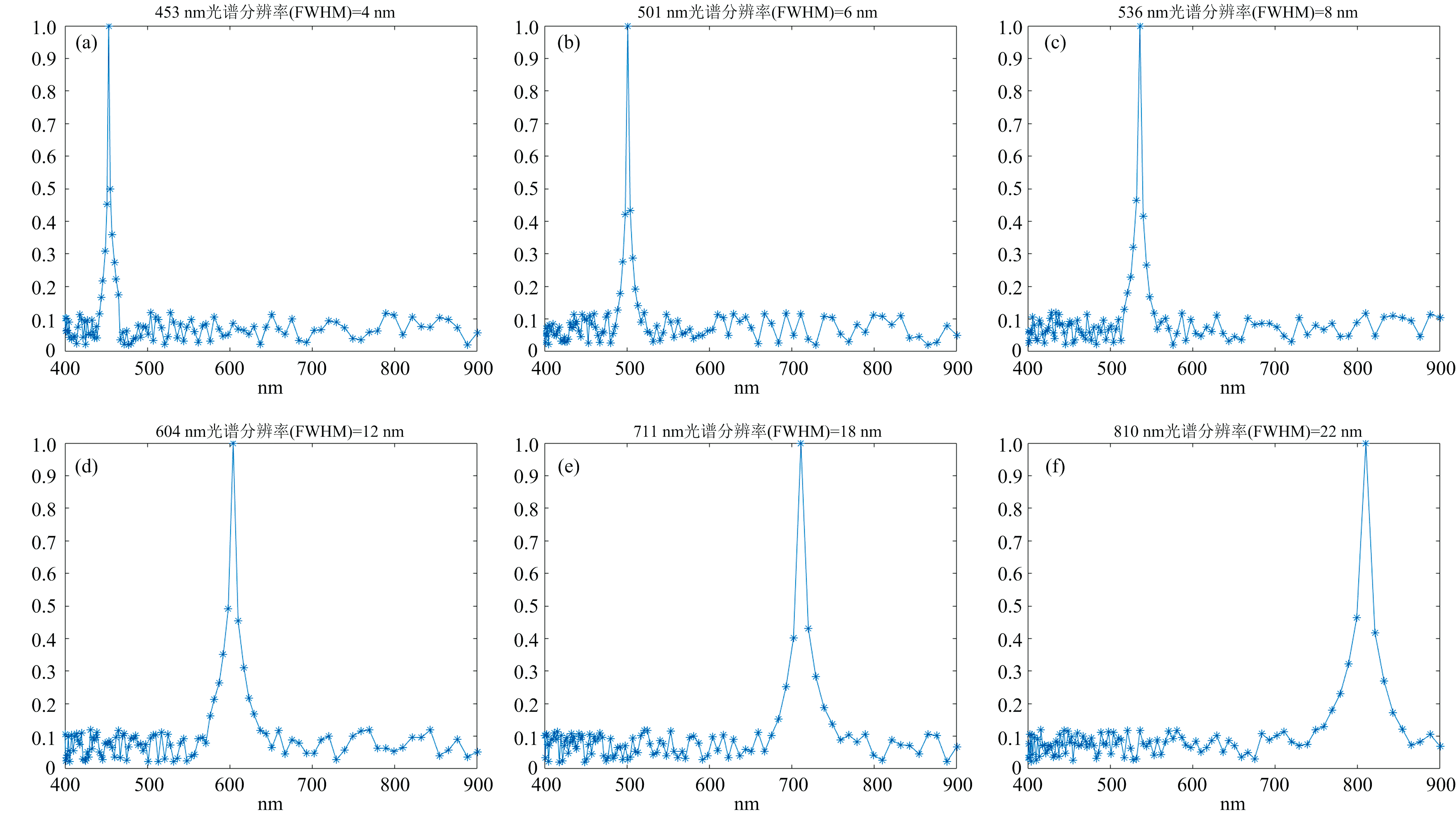 | 图12 光谱分辨率典型谱段测试结果 (a): 453 nm; (b): 501 nm; (c): 536 nm; (d): 604 nm; (e): 711 nm; (f): 810 nmFig.12 The spectral resolution test results of typical spectrum segment (a): 453 nm; (b): 501 nm; (c): 536 nm; (d): 604 nm; (e): 711 nm; (f): 810 nm |
| 表7 光谱分辨率测试数据 Table 7 The test data of spectral resolution |
利用标准光谱仪和原理样机对色板进行成像, 再选取色板中几个典型色块绘制光谱曲线, 分别是第二行第二列记为色块2-2, 同理还有色块3-2和3-4, 将重建光谱与参考光谱数据进行计算分析, 获得原理样机的光谱重建精度。 色板如图13所示。 参考光谱与重构光谱曲线对比图如图14所示。 原理样机的光谱重建精度分别为84.6%、 88.9%和87.4%。
 | 图13 色板实物图Fig.13 Color slab |
 | 图14 参考光谱与重构光谱曲线对比 (a): 色块2-2; (b): 色块3-2; (c): 色块3-4Fig.14 Comparison of reference spectra and reconstructed spectra (a): Color lump 2-2; (b): Color lump 3-2; (c): Color lump 3-4 |
参考GJB 10419— 2022星载多角度偏振成像仪规范测试样机偏振方向。 在样机前安装经标定的高消光比标准线偏振片, 在550 nm波长时消光比大于1 000:1; 将光源对准样机光瞳, 旋转线偏振片至0° 、 45° 、 90° 、 135° 附近, 找到四个通道响应最小值点记录其响应值和响应最大值点记录其响应值, 记录测量数据。 原理样机采集不同偏振方向图像见图15, 偏振方向测试结果见表8。
 | 图15 偏振方向测试 (a): 0° 偏振态; (b): 45° 偏振态; (c): 90° 偏振态; (d): 135° 偏振态Fig.15 Test of polarization direction (a): 0° polarization state; (b): 45° polarization state; (c): 90° polarization state; (d): 135° polarization state |
| 表8 偏振方向测试数据 Table 8 The test data of polarization direction |
对原理样机进行实验验证。 实验地点位于河北省承德市隆化县航飞试验场。 天气晴朗, 太阳高度角30° , 航飞高度500 m, 目标选取地面建筑、 道路及周边绿化带。 无人机载重25 kg, 型号为KWT-X8L-25, 无人机实物如图16所示。
 | 图16 无人机实物图Fig.16 Physical diagram of the UAV |
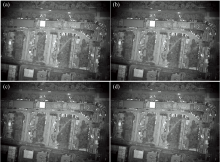
图17为航拍的偏振图像的原图。 图18展示了四个偏振态对应的全色图像, 成像质量良好。
 | 图17 航拍偏振图像原图Fig.17 Aerial polarization image |
 | 图18 不同偏振态全色图像 (a): 0° 偏振; (b): 45° 偏振; (c): 90° 偏振; (d): 135° 偏振Fig.18 Panchromatic images of different polarization states (a): 0° polarization; (b): 45° polarization; (c): 90° polarization; (d): 135° polarization |
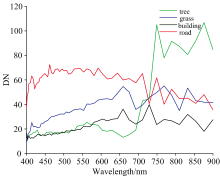
对场景中不同地物目标如建筑、 树木、 草及道路等重构了53个特征谱段的光谱图像, 并绘制了光谱曲线, 如图19所示, 可以看出不同地物光谱曲线差异明显, 不同目标区分度较高, 具有明显的峰谷特征。
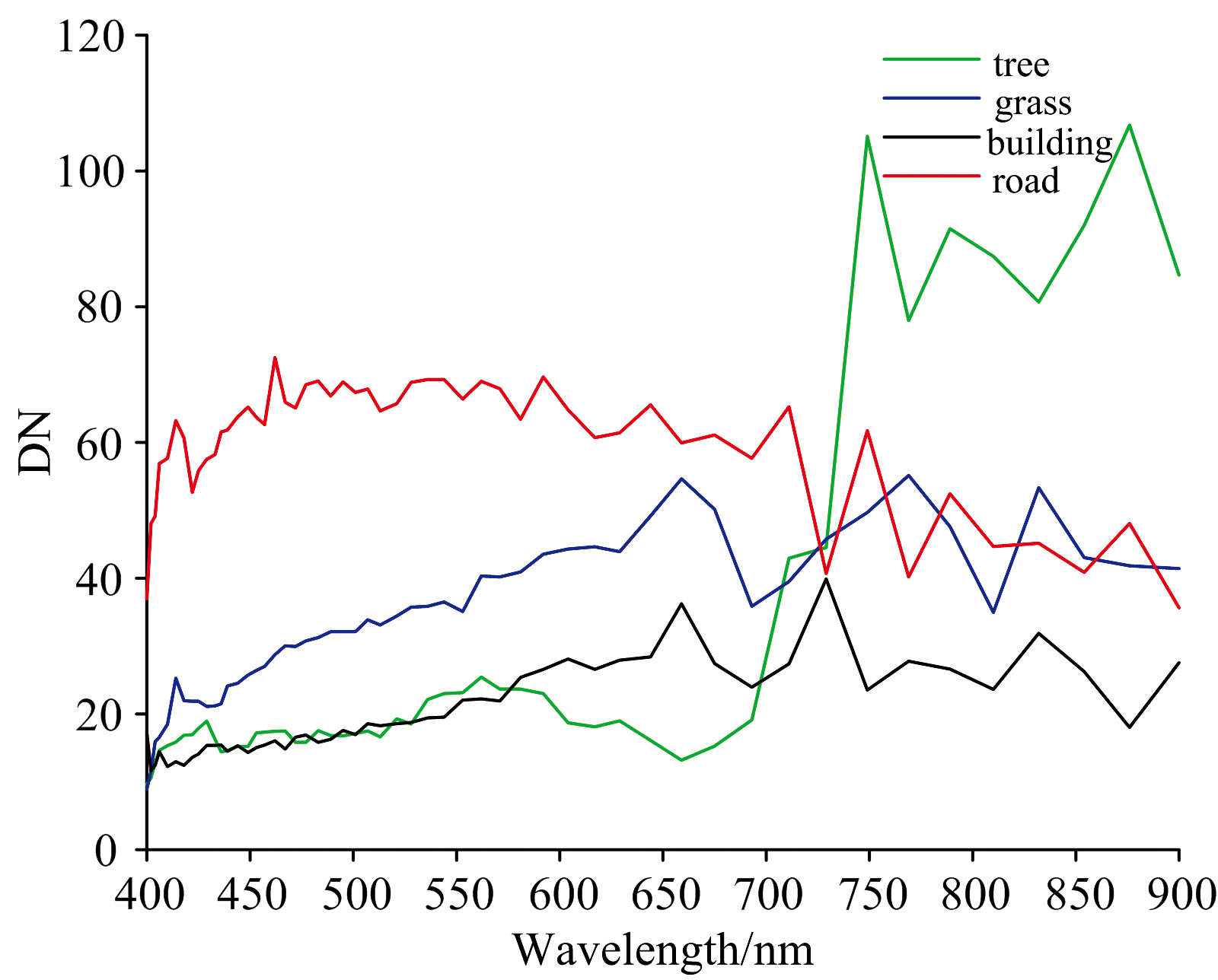 | 图19 4种目标光谱曲线图Fig.19 Spectra of four targets |
上述结果表明, 提出的无人机载快照式计算光谱偏振一体化成像系统不仅实现了光谱图像与偏振图像的实时获取, 且数据重构简单、 效果良好。
还对地物场景进行了融合图像对比度提升试验, 分别使用原理样机和普通强度探测相机获取同一场景图像, 普通强度探测相机获取的图像为强度图像, 原理样机获取的是偏振图像, 经解算将偏振图像与强度图像进行融合, 获得融合图像, 利用公式计算融合图像对比度提升。 对比度提升公式如式(1)和式(2)
式(1)和式(2)中, I为目标强度, Ib为背景强度, Δ Cw为融合图像对比度提升, Cw为融合图像对比度, C'w为强度图像对比度。
试验结果如图20所示。 经过计算, 强度图像对比度为4.84%, 融合图像对比度为6.98%, 融合图像对比度提升44.2%。
 | 图20 融合图像对比度提升试验结果图 (a): 强度图像; (b): 偏振图像; (c): 融合图像Fig.20 The effect of fused image contrast enhancement (a): Intensity image; (b): Polarization image; (c): Fused image |
对比文献[3]中利用基于线性渐变滤光片的偏振高光谱成像仪的实验, 文献[3]通过转台进行推扫才能获得完整的目标光谱图像, 工作波段为430~880 nm, 光谱分辨率为10 nm, 无法实时成像。 本文则通过一次曝光即可同步实时获取光谱信息和偏振图像, 工作波段为400~900 nm, 光谱分辨率为10 nm, 具备更高的时间分辨率和应用能力。
提出了一种基于编码孔径和微阵列的光谱偏振信息实时、 小型化探测方法, 设计了共孔径分光二次成像光学系统, 从原理上解决了传统光谱偏振成像系统结构复杂、 体积重量大、 分辨率降低等问题, 具备了系统小型化与偏振光谱信息实时同步获取能力, 并搭建完成原理样机, 进行了航飞实时成像试验。 经测试, 系统实现指标为工作波段为400~900 nm, 成像分辨率为0.1 m, 视场角为29.09° , 光谱分辨率为10 nm, 样机重量为2.75 kg, 实现了系统小型化、 偏振与光谱信息实时获取、 多维信息重构简便的能力, 为快照式偏振光谱多维信息获取提供了一种新型有效的技术手段。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|