

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
面向地物分类的高光谱视觉显著性波段选择方法研究
[杨桄1  , 胡昊文
, 胡昊文1 , 金椿柏1 , 任春颖2, * , 王龙光1 , 王琪1 , 刘文婧1, * ]
, 胡昊文, 王龙光]
|
|


作者简介: 杨 桄, 1975年生, 空军航空大学教授 e-mail: yg2599@126.com
遥感图像波段选择是遥感数据应用的前提, 它帮助人们对遥感图像进行可视化分析和解译, 并且能够增强图像的质量, 体现地表不同地物之间的差异性, 为目标识别、 图像分类、 变化检测提供数据基础。 但是, 高光谱图像波段数目众多, 即光谱维度高的特性给高光谱图像波段组合带来了巨大问题与挑战。 所以, 对高光谱数据进行降维处理是必要的。 波段选择研究中, 为了保持原始波段的光谱特性不变, 特征(波段)选择方法是最合理的降维方法。 在原始数据集合中选择特定波段构成波段子集, 随后进行波段组合研究。 本文设计了一种改进近邻子空间划分(IASP)的方法, 构建了基于视觉显著性的波段选择模型在模型中通过对比各个典型显著性检测算法的效果, 最终选择HC(histogram-based Contrast)显著性算法选择显著波段, 并设计对比实验, 利用珠海一号高光谱卫星数据, 验证了该方法的有效性。
, HU Hao-wen, WANG Long-guang
The selection of remote sensing image bands is a prerequisite for the application of remote sensing data. It aids in the visualization and interpretation of remote sensing images, enhances image quality, and highlights the differences between different surface features. This provides a foundational basis for target recognition, image classification, and change detection. However, the large number of hyperspectral image bands, that is, the high spectral dimension, brings great problems and challenges to the band combination of bloom images. Therefore, it is necessary to reduce the dimension of hyperspectral data. In research on band combination, to preserve the spectral characteristics of the original band, the feature selection method is the most reasonable dimensionality reduction approach. In the original data set, select a specific band to form a band subset, and then carry out band selection research. In this paper, an Improved adjacent subspace partition (IASP) method is designed, and a band selection model based on visual saliency is constructed. Finally, the Histogram-based Contrast algorithm is selected to select the significant band, and a Contrast experiment is designed to verify the effectiveness of the method using the data of the OrbitaHyperSpectral satellite.
遥感(remote sensing, RS)是利用航空、 航天设备搭载的各类传感器, 通过无接触的方式获取地物反射的电磁波信号, 进而分析、 揭示得到地物变化信息、 特征性质的技术。 遥感技术经历了全色阶段、 彩色摄影阶段、 多光谱阶段以及高光谱阶段几个阶段[1]。 高光谱遥感(hyperspectral remote sensing, HIS)是用很窄且连续的电磁波波段对地物进行持续遥感成像的技术, 它包含了丰富的空间、 辐射和光谱三重信息。 受制于高光谱图像波段数目众多、 信息冗余度高、 数据量大等因素, 高光谱图像的研究热点广泛, 涵盖降维、 分类、 目标检测和混合像元分解等多个方向。 其中, 降维研究致力于从数十个波段中选择目标波段并进行有效组合, 以提升高光谱数据在各场景中的应用性能, 这仍然是一项具有挑战性的课题[2]。
现有研究表明, 视觉系统每秒接受的可视化信息达到了数亿比特。 人类在观察时, 通常会倾向于观察事物中局部的重要信息, 即视场中最能引人注意的区域, 将该区域的视觉重要程度定义为视觉显著性(visual saliency)。 视觉显著性检测是计算机视觉领域的一个重要研究方向, 旨在模拟人类的视觉注意机制(visual attention mechanism, VAM), 从图像或视频中提取出最吸引人眼注意的区域或目标[3]。 其核心是模拟人类视觉系统(human visual system, HVS)的注意机制, 通过计算图像中不同区域的显著性值, 筛选出最引人注目的区域。 根据处理方法的不同, 视觉显著性检测模型一般可分为两类, 一种是空间域模型, 直接在图像像素空间计算显著性, 例如基于局部对比度、 全局对比度或特征融合的方法; 另一种是变换域模型, 将图像转换到频域或其他变换域, 利用频域特性计算显著性。
Itti等[4]在基于高斯金字塔融合颜色、 亮度和方向特征, 开创了视觉显著性检测的先河。 Hou等[5]通过分析图像的频域log幅度谱, 去除冗余信息, 提取显著区域。 Achanta等[6]提出FT算法基于Lab颜色空间, 计算像素向量与平均像素向量的欧氏距离, 生成显著性图。 Cheng等[7]基于颜色全局直方图, 计算像素点之间的颜色对比度, 生成显著性图。 近年来, 深度学习技术也在视觉显著性检测中得到了广泛应用, 显著提升了检测性能[8, 9]。 基于卷积神经网络(CNN)的方法, 如DeepGaze系列利用预训练的CNN模型提取特征, 结合人类眼动数据进行显著性预测, SalGAN基于生成对抗网络(GAN), 生成高质量的显著性图。 基于注意力机制的方法, 包括ML-Net引入多级注意力机制, 结合全局和局部特征进行显著性检测, CPD模型通过级联部分解码器(cascaded partial decoder), 逐步细化显著性图。 还有基于多模态融合的方法, RGB-D显著性检测, 结合RGB图像和深度信息, 提升复杂场景下的显著性检测性能。
但是采取基于深度学习的显著性检测方法, 极易增加时间成本, 同时使研究变得更加复杂。 基于上下文感知(context aware, CA)显著性、 光谱残差(spectral residuals, SR)显著性的高光谱图像异常点检测技术, 这两种显著性算法均为传统算法。 彭忻怡[10]等提出一种基于显著性的波段选择方法进行高光谱图像分类, 定义了波段显著性指标, 并采取基于空间加权差异(spatially weighted dissimilarity, SWD)、 基于主成分分析(principal component analysis, PCA)、 快速有效显著性(fast and efficient saliency, FES)等9种传统的显著性检测算法输出显著图。 李茗欣[11]等提出利用ITTI显著性算法对原高光谱图像进行高斯加权, 更有效的检测到数据集中的异常目标。
综上所述, 视觉显著性算法在高光谱图像中处理与应用正处于起步、 发展阶段, 主流算法仍是传统的显著性检测算法。 并且传统的显著性检测算法计算速度较快, 复杂性低, 对于处理数据量极高的高光谱图像非常有利。
珠海一号卫星星座是由我国珠海欧比特宇航科技股份有限公司发射并运营的商业遥感微纳卫星星座, 由34颗卫星共同组成, 包括视频卫星(OVS-1视频卫星2颗与OVS-2视频卫星10颗)、 高光谱卫星(OHS高光谱卫星10颗)、 雷达卫星(OSS雷达卫星2颗)、 高分光学卫星(OUS高分光学卫星2颗)与红外卫星(OIS红外卫星8颗)。 其中OHS(OrbitaHyperSpectral)高光谱卫星都配置1台分辨率优于10 m、 幅宽优于150 km的高光谱相机, 在国际领域中处于领先水平。 10 m的空间分辨率意味着如果地面有一条宽仅15 m 的河流或道路, OHS高光谱卫星的光谱影像能轻易将河流或道路与其他地物区分, 而其他高光谱卫星分辨率都大于20 m, 没有办法识别到该河流。 OHS高光谱卫星不仅具有极高的空间分辨率, 而且光谱分辨率也达到了2.5 nm, 可以
监测到光谱信息的细微差异。 OHS高光谱卫星成像范围150 km× 2 500 km, 波谱范围400~1 000 nm[12]。 表1是本文选取的数据源概况以及其具体参数。
| 表1 数据源参数及描述 Table 1 Data source parameters and description |
目前, 高光谱图像的波段选择大多基于图像光谱信息量的多少, 而很少充分利用到波段图像空间信息。 根据视觉显著性原理, 它能很好的提供一种针对图像空间信息分布的检测、 评价方法, 因此将视觉显著性引入到高光谱图像波段选择中, 对不同地物定义其波段显著程度, 为后续波段组合的研究提供先验知识。
2.1.1 显著性算法应用基础
目前, 应用到图像处理的显著性算法主要有四种, 分别是: Local Contrast显著性算法, 计算某个像素在整个图像上的全局对比度, 即该像素与图像中其他所有像素在颜色上的距离之和作为该像素的显著值[13]; Frequency-turned显著性算法, 从频率角度分析图像, 图像在频率域可以分成低频部分和高频部分。 低频部分反映了图像的整体信息, 显著性区域检测用到的更多的是低频部分的信息; Histogram-based Contrast显著性算法, 基于区域比较的视觉显著性检测算法, 该方法基于颜色全局直方图计算像素点与其他像素之间的颜色特征差异, 差异度越大显著性越高; Spectral Residual显著性算法, 基于信息论的角度, 将图像分为突出信息和冗余信息, 通过在对数谱中用原图像的信息减去冗余信息, 即可获得显著目标的对数谱。 该算法首先对图像进行傅里叶变换, 将局部平滑的对数幅度谱作为冗余部分, 然后用原对数谱减去平滑后的对数幅度谱, 那么剩余的部分就是显著区域在频域中的信息, 最后通过傅里叶逆变换, 从频域变化到空域生成显著图。
| 表2 常见显著性算法 Table 2 Common saliency algorithms |
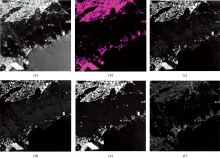
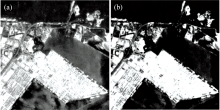
提取高光谱图像源的某一波段进行显著性算法处理得到如图1所示。 其中, 图1(a)是高光谱数据的第10波段原始数据, 图1(b)为结合奥维地球目视判读并通过图像处理技术得到的二元地面真值(ground-truth, GT)图, 主要呈现建筑用地的实际分布位置。 图1(c— f)分别展现了采用LC、 FT、 HC、 SR显著性算法得到的显著图。 显著图中背景区域受到抑制, 表现为深暗色调, 显著像元聚集成簇高亮显示, 成为图像中的显著区域。
 | 图1 波段10、 GT图及显著图 |
2.1.2 显著性检测波段效果评价
引入视觉显著性模型对特定高光谱波段进行显著目标的增强, 可以将图像中的显著地物目标提取出来。 经过大量实验, 结合珠海一号高光谱数据在各自子空间内相关性均比较强, 且波段数目相对较少, 采取四种显著性算法得到的最佳显著性波段具有较强的一致性, 如果分别采取四种方法对各个数据源进行实验, 这无疑会增加时间复杂性, 对结果的准确性也会产生一定影响。
本节引入视觉显著性检测指标中的平均绝对误差(mean absolute error, MAE)评价各显著性算法的检测效果, 并最终选取最佳的显著性算法。
评测指标MAE用来估算预测值与真值之间的一致性, 其值越小表示预测模型越好, 表达式为
式(1)中, W和H分别代表特征图的宽度和长度, P(x, y)表示预测图P中(x, y)处的像素值, Y(x, y)表示真值图Y中(x, y)处的像素值。 预测图P和真值图Y中的每一个像素值都需要被归一化到区间[0, 1]。
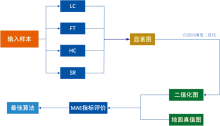
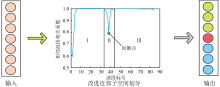
为了选出最佳的显著性检测算法, 采取计算机视觉中常用的大津法对图像进行二值化处理, 大津法属于自适应阈值的方法, 对所研究区域的高光谱数据波段选取至少10%的样本, 按照等差选取的原则选择出band4、 band12、 band20、 band28四个波段的显著图, 选取的样本覆盖了划分的三个子空间, 具有很强的代表性。 接下来检验四种显著性算法的检测效果, 实验中采用人工精细标注结果作为地面真值图, 流程如图2所示。
 | 图2 显著性算法选择流程Fig.2 Selection process of saliency algorithm |
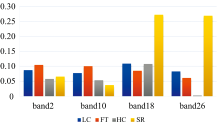
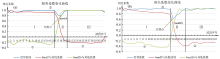
利用上述方法计算个显著性算法在样本中的值, 绘制为图3所示的柱状图。 SR算法虽然在band2和band10中的检测效果较好, 但由于在band18和band26中仅能检测到地物的边缘, 与地面真值产生较大误差, 可优先排除该算法。 FT算法在各个子空间都保持了较强的稳定性, 但相较于HC、 LC算法, 其平均绝对误差较大, 故可排除该算法。 对于HC和LC算法, 二者在原理上有很多类似之处, 其检测效果从图中分析同样具有很强的一致性, 结合二者在检验样本中的MAE的均值, 最终选取误差较小的HC算法。
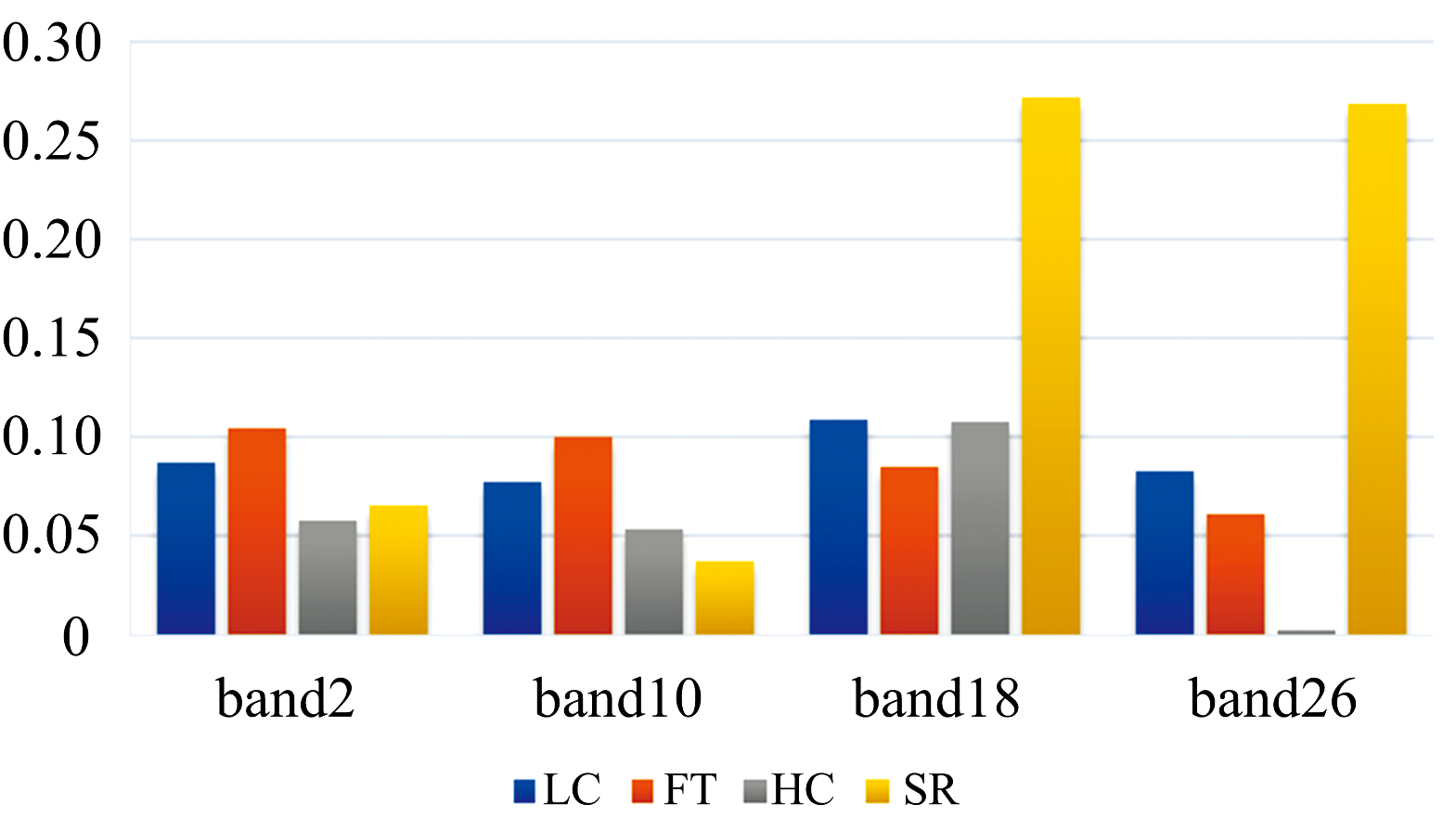 | 图3 不同算法MAE值比较Fig.3 Comparison of MAE values for different algorithms |
2.1.3 构建显著性波段选择模型
对于高光谱图像Iw× h× l, 它可以被看作一系列二维图像的集合{i1, i2, …, ik}, ik是图像I的第k波段。 利用HC显著性算法分别输出每个波段图像ik的显著图S(ik), 根据地物目标显著性评价指标对所有地物C中两两不同的地物c和地物d进行对比度差异分析, 定义波段ik的显著性为O
图4和图5分别展示了研究区域中大小为360× 360像素的原始band3、 band16及其对应的HC显著图, 其中地物有建筑、 林地、 水体, 经过对比度的差异分析, band16的显著性O
 | 图4 band3裁剪区及对应HC显著图Fig.4 Band3 crop region and corresponding HC saliency map |
 | 图5 band16裁剪区及对应HC显著图Fig.5 Band16 crop region and corresponding HC saliency map |
由于高光谱数据存在大量冗余信息, 为了更加有效地提取其中主要的光谱特征, 将高光谱数据划分为若干不相关的子空间是目前高光谱数据降维的主流方法。 唐厂[14]等提出了一种基于近邻子空间划分的波段选择方法(band selection method via adjacent subspace partition, SEASP), 根本思想是设计的近邻子空间划分方法(adjacent subspace partition, ASP)。 根据高光谱图像波段相关系数具有分块的特性, 两个相邻子空间存在间断点, 在间断点处两相邻波段相关性底, 可以将此作为划分的依据。 下面设计一种改进近邻子空间划分(improved adjacent subspace partition, IASP)的方法, 该方法流程示意图如图6所示。 该方法主要思想为基于对珠海一号高光谱卫星数据的分析, 在近邻子空间划分基础上做出的改进。
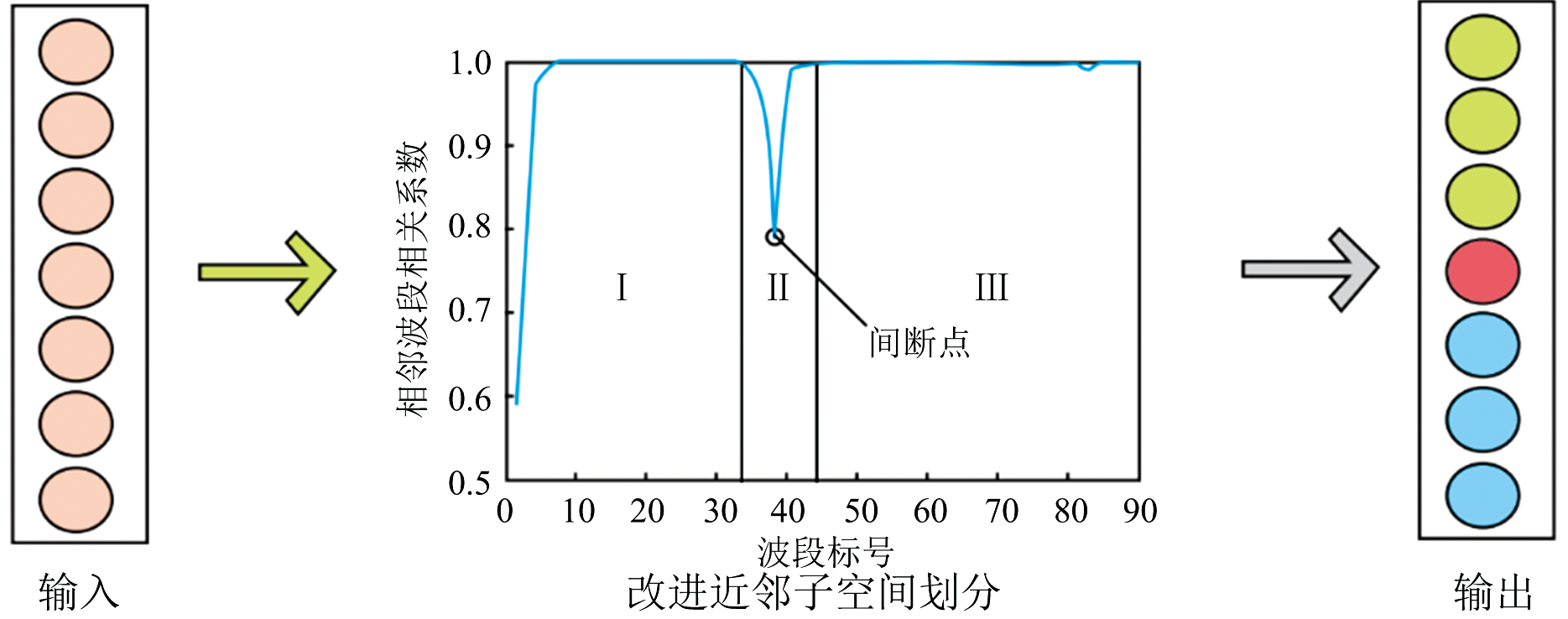 | 图6 改进近邻子空间划分流程示意图Fig.6 Schematic diagram of improved neighbor subspace partitioning process |
计算数据所包含波段两两之间的相关系数, GWi与Wj两波段的相关系数ri, jG计算原理如式(2)。
式(3)中, Wik和Wjk代表所在波段的第k个像素值,
 | 图7 子空间划分结果 |
根据这一特性, 可将数据源1划分为三个互斥子空间: 1~16、 17~19、 20~32。 结果如图7(a)所示。
同样的, 可以将数据源2划分为三个互斥的子空间: 1~17、 18~21、 22~32, 1~16、 17~20、 21~32, 如图7(b)所示。
通过对比分析, 发现2个数据源的分割点均为band18, 只是在划分子空间的结果上存在1~2个波段的偏移。
在划分好的子空间中, 第Ⅰ 和第Ⅲ 子空间波段数目均达到10~15个, 并且在这一区间曲线变化平缓, 这表明第Ⅰ 和第Ⅲ 子空间内波段间的相关性很高, 存在较高的信息冗余现象, 在波段组合研究中, 要分别从这两个子空间内适当选取合理波段, 以避免合成的彩色影像出现信息缺失。 而第Ⅱ 子空间内波段数目仅有3~4个, 但波段相关系数却出现急剧变化, 这可能预示着这一区间的波段存在较多的地物空间分布信息, 因此在选取波段时, 还应当考虑从第Ⅱ 子空间内选择合理波段。
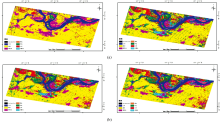
图8为计算高光谱数据相关性矩阵并可视化的结果, 相关系数越高, 灰度值越大。 其矩阵灰度图具有成块的特点, 根据这一特性可将高光谱数据空间划分为合适的子空间。 根据上述改进近邻子空间划分的方法, 结合单独波段相关系数及相邻波段相关系数曲线变化率, 设置阈值对可视化矩阵图进行二值化处理, 最终得到图8的矩阵图, 得到三个互斥的子空间, 二者结果高度相符。 这进一步印证了该方法的可行性。
 | 图8 灰度矩阵及二值化Fig.8 Gray matrix and binarization |
2.3.1 显著性波段选择结果
在前面划分的高光谱图像子空间内, 根据HC显著性对各个子空间内的波段进行排序, 选择出3个波段组合为波段子集。 经过划分的高光谱图像, 各个子空间内波段数目并不相同, 第Ⅱ 子空间内尽管波段数目较少, 但子空间内各个波段之间的相关系数均比较小, 第Ⅰ 子空间和第Ⅲ 子空间波段数目大致相同, 均衡二者的权重, 最终确定在三个子空间内分别选取2个波段组成波段子集。
各个子空间内进行波段显著性排序后, 如果选取排名前两名的波段, 会存在波段序号过近的现象, 考虑到波段之间的重叠和冗余, 这种选择方法增加了重复信息, 对波段组合研究意义不大。
为解决波段之间的冗余产生的困扰, 利用结构相似性SSIM滤除相似波段。 SSIM(structural similarity metric), 它基于人眼对图像结构信息敏感的特性, 用于评估两幅图像的相似度。 计算公式如式(4)和式(5)
式(4)和式(5)中, ix和iy是输入的两幅图像, ux和uy分别表示这两幅图像的均值,
SSIM的取值范围在-1到1之间, 其绝对值越接近于1, 则两个波段图像越相似; 越接近0, 则2个波段图像更不相关。 图9证明了SSIM作为滤除相似性波段的有效性。 计算各个子空间内各波段与最显著波段的SSIM, 若其高于所设定的阈值, 则排除该波段, 选择满足要求的波段。
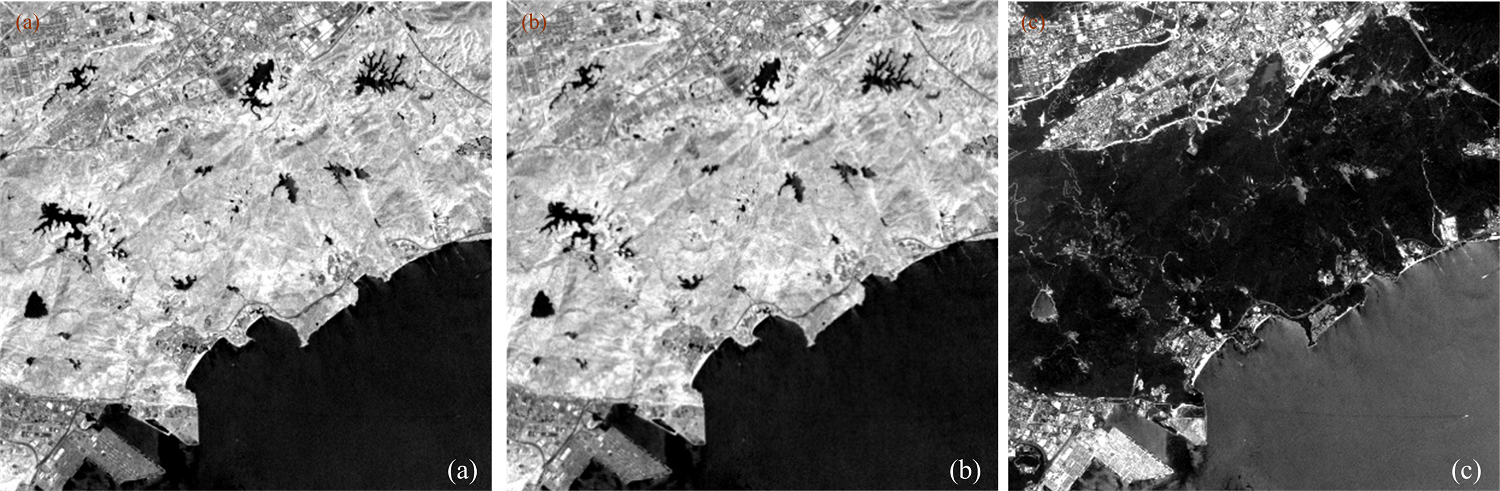 | 图9 band30 (a)、 band31 (b)、 band10 (c) SSIM对比 |
2.3.2 其他方法波段选择结果
为了避免实验重复性, 同时验证本波段选择方法的优势和有效性。 设计以下对比实验:
(1)基于交叉信息量的波段选择(MI);
(2)基于自适应波段选择在近邻子空间的波段选择(ABS_ASP)实验, 验证近邻子空间划分的合理性;
(3)基于最大信息量在改进近邻子空间的波段选择(MI_IASP)实验, 验证改进近邻子空间的合理性;
(4)基于HC显著性算法的波段选择(HC)。
各方法选择结果如表3所示。
| 表3 波段选择结果 Table 3 Band selection results |
2.4.1 波段结果相关性
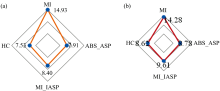
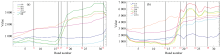
各个实验选择的波段组成为一个波段子集, 分别计算四个子集中六个波段间的相关系数之和。 相关系数之和越小, 波段选择效果越好[15]。 如图10所示, HC显著性算法波段选择的子集表现出良好的性能。
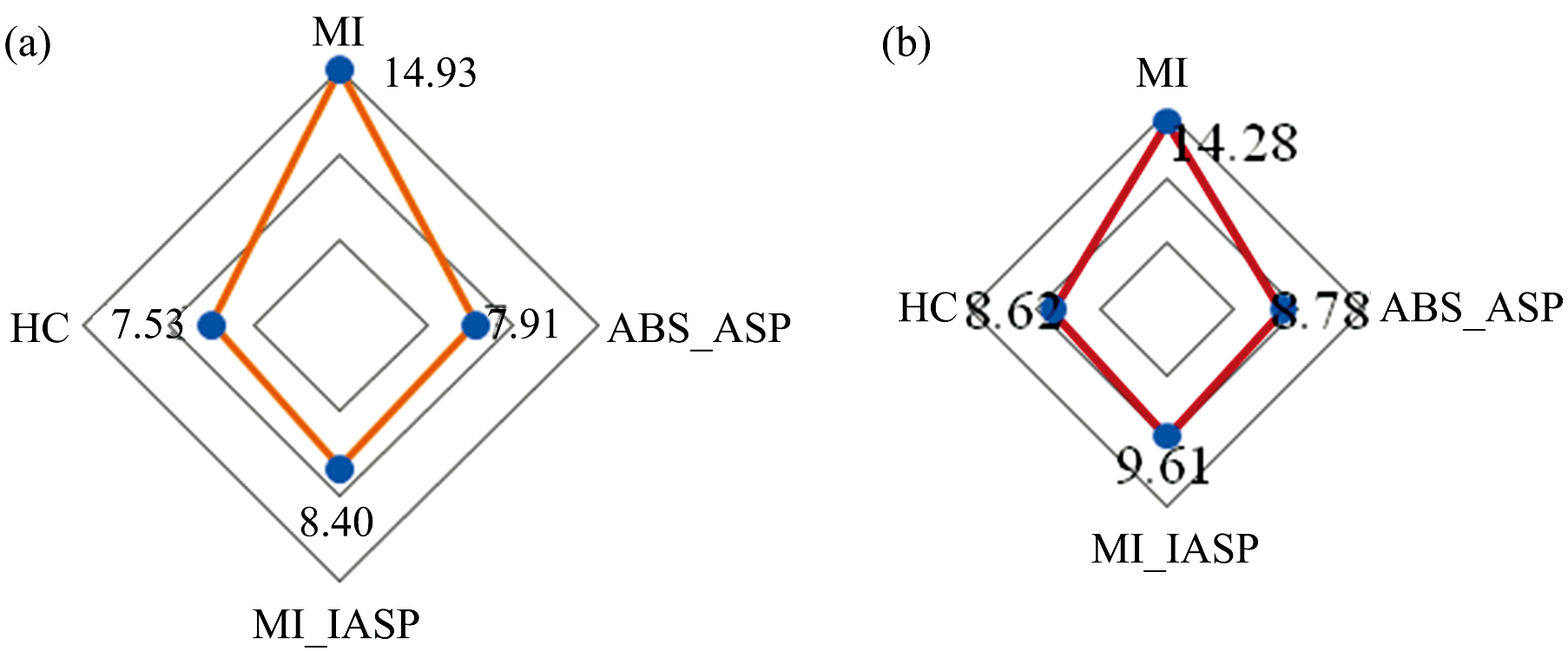 | 图10 各数据源波段子集相关系数之和 |
例如在数据源1中的band17, 地物的光谱反射值比较分散, 差异性显著; 在数据源2中的第二子空间中, 引入的显著性算法所选择的波段为band19、 band21, 通过对比该波段处的光谱反射值, 各类地物反射值差异性较大, 并且曲线出现陡峭变化, 说明在这2个波段处光谱反射变化率大, 数值变化明显。 其他方法选择的波段子集由于波段间过于相近, 各类地物的光谱变化趋势相近, 很难表现地物的可分性。
利用本方法选择的波段子集, 在各个数据源的三个子空间内光谱可分性较好, 最大程度上避免了光谱反射值相同的情况。
2.4.2 地物分类实验
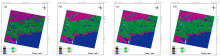
将四种方法选取的波段子集分别进行地物分类实验, 采取支持向量机(SVM)监督分类、 最大似然(MLC)监督分类。
二者都属于监督分类方法, 首先要确定地物类别数目, 再创建训练样本, 同时保证样本中各类别间具有高可分离性, 最后执行监督分类。 前者的主要思想是建立一个最优决策超平面, 使该平面两侧距平面最近的两类样本之间距离最大化, 对分类问题提供良好的泛化能力; 后者的主要思想是假设每个类别在训练样本上服从特定的正太分布, 用统计方法根据最大似然比贝叶斯判决准则法建立非线性判别函数集, 计算各待分类样区的归属概率。 各数据源分类结果如图12 和图13所示。
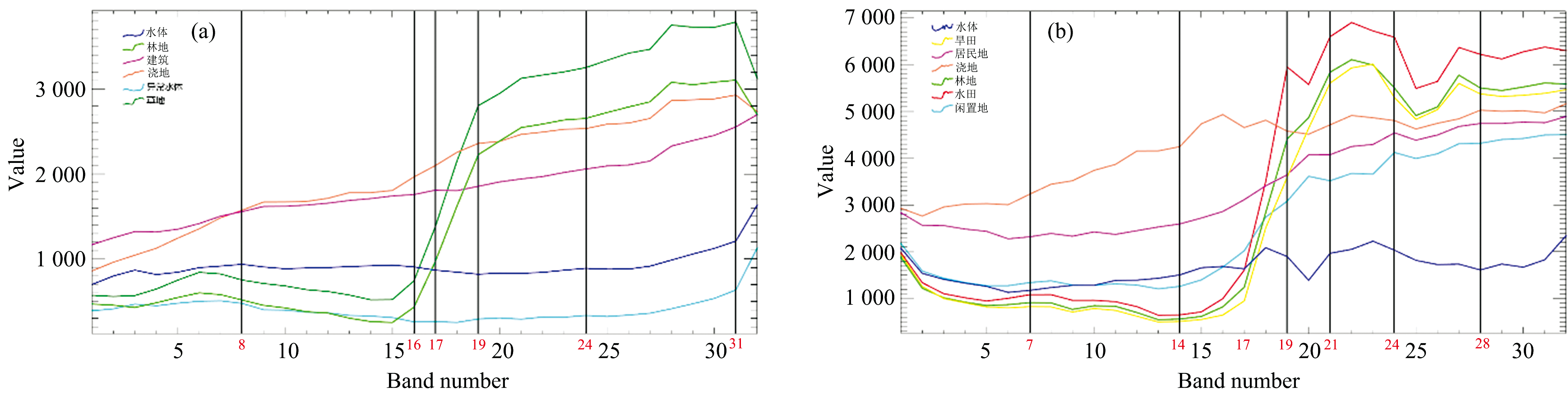 | 图11 各数据源光谱曲线 |
 | 图12 数据源1 SVM分类 |
 | 图13 数据源1MLC分类 |
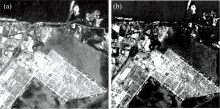
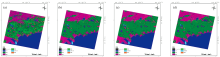
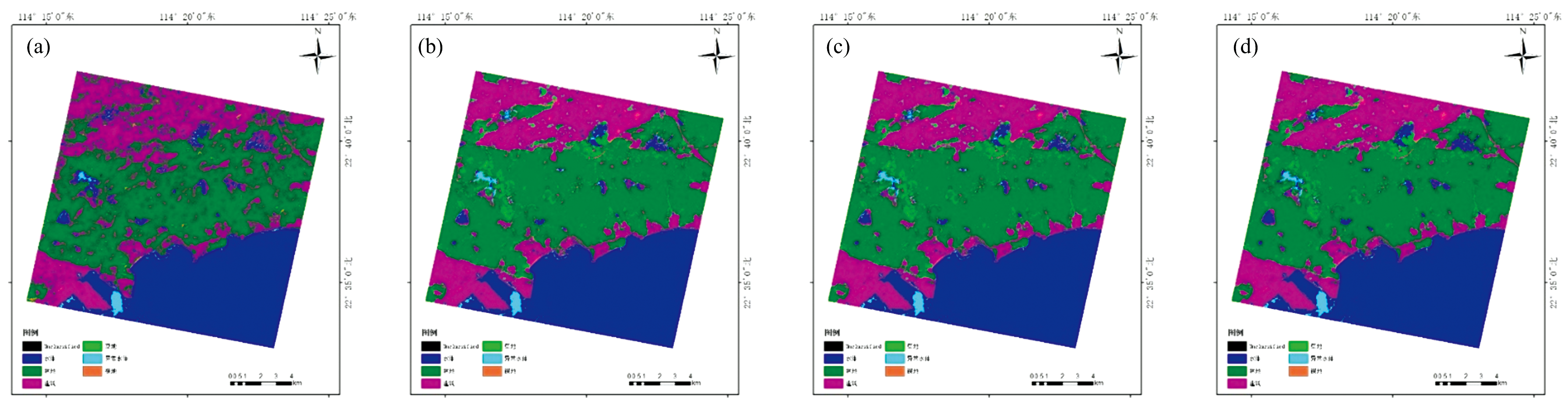
根据图14和图15, 基于MI波段选择结果在SVM分类器中检测不到草地, 在MLC分类器中林地错分为草地的现象比较明显。 通过与卫星地面影像图对比, 发现HC算法波段选择的分类结果与真实地物一致。 如图14和图15, 数据源2中乡间小路上种植树林, 因此应被分为林地, 通过对比, 仅有本方法能够准确提取出来。
 | 图14 数据源2 SVM分类 |
 | 图15 数据源2 MLC分类 |
通过对比各数据地物分类后的结果, 发现本方法在主观视觉上具有较好的效果。 各组数据经过基于MI的波段选择后进行分类得到的结果图中, 无论是SVM分类, 还是MLC分类, 均存在较大面积的错分、 漏分现象。
经过本文所提出的方法得出的波段子集, 在SVM和MLC分类后都比其他方法视觉效果好。 本方法得出的分类结果图不仅错分、 漏分情况少, 而且边界都比较清晰明显, 同类地物均聚集成簇, 有利于各类信息的提取。
2.4.3 分类精度评价
计算分类后的混淆矩阵, 选取矩阵中的总体精度(overall accuracy, OA)、 Kappa系数进行综合评价。 总体分类精度是指被正确分类的样本总数占总体样本个数的比例, 如式(6)。
Kappa系数衡量分析结果图和真实所标注图形之间重合程度的指数。 其计算公式如式(7)所示。
式(7)中,
根据表4分析, 四种波段选择结果中, HC算法波段选择进行图像分类具有稳定优异的表现。 数据源1分类后的精度中, 本方法SVM和MLC分类精度相近, 总体精度分别为95.125 8%和95.243 7%, 分别比MI波段选择结果提高9.984 3%、 11.556 6%; Kappa系数分别为0.934 9和0.937 3, 分别比MI波段选择结果提高0.135 6、 0.151 1。 相对于本文设计的对比实验(ABS_ASP、 MI_IASP), 两种分类方法的总体精度和Kappa系数分别提高0.5%~2%、 0.1~0.2不等。 数据源2的分类精度与数据源1有相似性, 总体结果表明本文提出的波段选择结果效果最佳。
| 表4 OA和Kappa系数 Table 4 OA and Kappa coefficients |
在各个数据源中, 本文方法的OA和Kappa系数都是最高的。 这进一步说明该波段子集所包含的地物的光谱信息、 空间分布信息都是最佳的, 为下一步波段组合研究奠定良好基础。
计算机视觉领域高速发展, 给高光谱图像智能化处理带来极大便利, 视觉显著性检测可快速检测到图像中的显著区域, 凸显不同地物间的对比度差异, 有助于在高光谱图像降维、 分类、 目标检测等任务中提高处理性能。 提出了基于视觉显著性的高光谱图像波段选择研究, 并针对高光谱图像信息冗余度高提出改进的近邻子空间划分(IASP)方法。 研究通过引入视觉显著性算法, 利用MAE评价指标对比分析波段地物特性显著强化能力, 得出HC显著性算法性能优于其他算法。 并与常规波段选择算法开展实验对比分析, 从主观与客观角度验证显著性方法的有效性。 通过地物分类实验对比结果多项分类精度参数, 验证了HC显著性算法波段选择结果的优越性。
本文提出的基于视觉显著性的高光谱图像波段选择方法在实验中表现出较好的性能, 但仍需在算法普适性、 计算复杂度和数据集多样性等方面进一步优化。 未来, 随着计算机视觉和高光谱技术的不断发展, 该方法在降维、 分类、 目标检测等领域具有广阔的应用前景, 特别是在实时处理和多源数据融合方面。 通过结合深度学习、 多尺度分析和自适应技术, 可以进一步提升方法的性能和应用价值。
致谢: 此次实验的高光谱卫星影像采用了珠海欧比特宇航科技股份有限公司的珠海一号高光谱卫星数据产品, 在此表示衷心的感谢!
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|