
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
高密度植被覆盖区基于无人机高光谱数据的农田土壤有机质反演
[汪杰1  , 孙孝林
, 孙孝林2, * , 伍丹华3 , 周亚男1 , 刘畅4 , 曹越4 , 汤叶涛4 , 张美薇1 , 王晓晴1 , 曾令涛1 , 崔宇培1 ]
, 孙孝林, 伍丹华|
|


作者简介: 汪 杰, 2001年生, 中山大学地理科学与规划学院硕士研究生 e-mail: wangj955@mail2.sysu.edu.cn
精准、 高效地估测土壤有机质含量并获取其空间分布, 对于农业发展、 生态环境保护和气候变化应对等领域至关重要。 然而, 传统的农田土壤有机质信息获取方法存在诸多局限, 难以满足实际需求, 尤其是在高密度植被覆盖的热带和亚热带地区。 当前, 无人机广泛普及, 并且大量基于植被遥感的土壤信息反演研究已为解决该问题提供了新的思路。 为了验证该思路, 本研究以广东省韶关市一块面积约75公顷的农田为研究对象, 首先获取作物成熟期的无人机植被高光谱影像, 并采集103个土壤样本带回实验室进行高光谱和有机质含量测定, 接着采用连续小波变换对无人机植被和实验室土壤高光谱进行特征提取, 最后结合随机森林算法, 分别对特征提取前后的高光谱数据进行土壤有机质含量反演及制图, 并与普通克里格制图进行比较。 结果表明: (1)无人机植被高光谱与土壤有机质含量具有显著相关性, 但无人机植被高光谱反演土壤有机质含量的准确度略低于土壤高光谱; (2)经过连续小波变换处理后, 无人机植被高光谱反演土壤有机质的准确度优于土壤高光谱, 但仍略低于连续小波变换后的土壤高光谱; (3)无人机植被高光谱反演土壤有机质含量的制图准确度优于传统的普通克里格方法, 且非常精细。 综合无人机植被高光谱在成本、 效率上的显著优势, 本研究认为无人机植被高光谱反演并制图土壤有机质含量的方法可为智慧农业等领域提供大量、 详尽的土壤信息, 具有广阔的应用前景。
, SUN Xiao-lin, WU Dan-huaAccurate estimation of soil organic matter (SOM) content and its spatial distribution is crucial for sustainable agriculture and ecological management.Traditional SOM content measurement methods are insufficient, especially for high-density vegetation areas in tropical and subtropical regions. The widespread use of unmanned aerial vehicles (UAVs) and numerous studies predicting soil information based on vegetation remote sensing data provide a solution to this problem.To evaluate the proposed approach, a 75-hectare agricultural field in Shaoguan City, Guangdong Province, was selected as the study area. UAV hyperspectral imagery of vegetation at crop maturity was first acquired, and 103 soil samples were collected and transported to the laboratory for hyperspectral measurement and SOM content analysis. Subsequently, the continuous wavelet transform (CWT) was applied to extract features from both the UAV vegetation and laboratory soil hyperspectral data. Finally, SOM content estimation and mapping were performed using random forest algorithms on the hyperspectral data before and after feature extraction, with the results compared to those obtained using Ordinary Kriging-based mapping. The results indicate that: (1) There is a significant correlation between UAV vegetation hyperspectral data and SOM content, although the accuracy of SOM content estimation using UAV vegetation hyperspectral data was slightly lower than that using soil hyperspectral data; (2) After CWT, the accuracy of SOMcontent estimation using UAV vegetation hyperspectral data was superior to that of soil hyperspectral data, though still slightly lower than that of soil hyperspectral data after CWT; (3) The mapping accuracy of SOM content inversion using UAV vegetation hyperspectral data was better than that of the traditional Ordinary Kriging method, and was highly refined. Considering the significant advantages of UAV vegetation hyperspectral data in terms of cost and efficiency, this study suggests that the method of SOM contentestimation and mapping using UAV vegetation hyperspectral data is promising for providing abundant and detailed soil information for smart agriculture and other fields.
土壤有机质(soil organic matter, SOM)是土壤功能的主要物质基础, 在农业、 生态、 环境、 水文、 气候变化等方面发挥着重要作用[1]。 例如, 其含量的动态变化是精准农业和施肥管理的关键信息支撑[2]。 因此, 农田尺度上的SOM含量高精度反演与监测一直是土壤领域的研究热点和难点。
传统的SOM含量信息获取方法主要依赖于野外采集样本和实验室理化分析。 该方法准确度很高, 但费时、 费力、 成本高、 效率低。 近二十年里快速发展的土壤高光谱技术在SOM含量的高效估测中表现出了巨大潜能[3, 4]。 然而, 高光谱技术仍需要采集和处理土壤样本, 或原位测定土壤, 仅能获取有限点位上的数据, 难以低成本、 高效率地满足当前及未来精准农业、 智慧农业等对农田尺度上SOM含量高精度空间分布信息的需求[5]。 此外, 众多学者还开展了基于卫星遥感影像反演SOM含量的大量研究[6, 7, 8]。 例如, 王丽萍等[8]利用卫星遥感影像反演SOM含量, 其预测模型的决定系数(coefficient of determination, R2)达到了0.6; Dou等[9]利用多时相卫星遥感影像反演松嫩平原的SOM含量, 建模R2在0.48~0.70之间。 尽管这种方法可以高效、 廉价、 无损、 详尽且周期性地反演SOM含量空间分布信息, 但SOM含量的空间异质性较强而卫星遥感影像的空间分辨率相对较低, 且受天气、 云层的影响较严重。 因此, 这种方法在农田尺度上难以实现动态精细化地监测SOM含量。
近年来, 随着无人机技术的快速发展和广泛应用, 一些学者开始用无人机高光谱反演SOM含量并制图。 其原理和技术方法与卫星遥感反演SOM含量相同, 即直接用土壤光谱反演SOM含量或用植被光谱分析出植被信息后再间接反演SOM含量, 后者如常用于数字土壤制图领域中的遥感波段、 归一化植被指数、 叶面积指数等等[10]。 但无人机高光谱提供了更精细的空间分辨率和光谱分辨率, 同时也具有高效、 廉价、 无损、 详尽等优点, 时效性更强。 因此, 一些研究认为该方法在土壤信息获取方面有很好的应用前景[11]。 例如, 宋奇等[2]在西北湟水流域采集了同时期裸土的原位高光谱、 实验室高光谱和无人机高光谱, 用于SOM含量反演并检验准确度。 他们的结果表明, 无人机高光谱反演的准确度仅比原位高光谱低5.9%, 比实验室高光谱低14.3%。 他们进一步用光谱直接转换法校正无人机高光谱后再反演SOM含量, 准确度提高了15.9%, 达到了实验室高光谱反演SOM含量的准确度。 Jin等[12]、 Hong等[13]对比分析了无人机高光谱、 卫星遥感光谱和实验室高光谱反演SOM含量的准确度, 结果一致地表明无人机高光谱具有独特优势, 在精准农业中具有巨大的应用潜力。
上述研究多是基于裸土期无人机高光谱数据进行SOM含量反演研究。 但在我国热带至亚热带南缘的农田地区, 土壤常年被高密度植被所覆盖, 卫星遥感或无人机难以直接获取土壤光谱信息。 因此, 截至目前, 鲜有研究探讨高密度植被覆盖条件下无人机高光谱反演SOM含量的空间分布及制图等问题。 实际上, 大量基于卫星遥感影像反演SOM含量的研究都认为, 由于土壤理化性质差异直接影响植被的生长状态[14, 15, 16, 17], 因而可间接利用植被信息来反演SOM 含量。 这是因为植物从土壤中获取营养、 水分、 物理支撑等, 其生长状况很大程度上受限于土壤的状况, 是土壤状况的外在表现。 例如, 科研人员早已总结出了一套通过作物生长状况如叶片颜色(即可见光波段)、 开花情况、 果实外观等判断植物及土壤缺素状况的规律。 因此, 大量研究常常使用遥感获取的植被光谱来预测土壤信息, 包括SOM含量, 尤其是在土壤制图中, 遥感信息一直是预测土壤的主要协变量[10]。 例如, 王茵茵等[18]利用卫星遥感影像数据构建植被指数, 将其作为预测因子开展SOM含量的预测研究。 李燕丽等[19]利用卫星遥感影像计算植被指数, 同时引入表征植被覆盖度、 植被净初级生产力等环境因子, 构建SOM含量预测模型。 更有研究表明, 无人机植被多光谱反演农田SOM含量的准确度反而高于裸土期的土壤多光谱[15]。 一些研究认为, 在不同的SOM含量下, 植被生长状态的微小差异可能呈现出了明显的高光谱反射率差异[20]。 因此, 无人机获取的植被高光谱建立的植被属性可作为土壤属性的有效代理, 进而应用于SOM含量反演与空间制图[21], 这可能是我国南方高密度植被覆盖区SOM含量预测与空间分布制图的一种有效途径。 目前, 国内外还少有研究探讨这种途径的准确度及其影响因素。
为此, 本研究以广东省韶关市常年种植作物的典型农田为研究区, 开展无人机植被高光谱反演SOM含量及制图研究。 首先, 在该农田内采集103个土壤样本, 并获取作物成熟期的无人机高光谱影像; 然后, 在实验室对土壤样品进行高光谱和SOM含量测定, 同时用连续小波变换(continuous wavelet transformer, CWT)方法对这些高光谱进行处理; 最后, 用随机森林(random forest, RF)算法构建无人机植被高光谱反演SOM含量的模型并预测制图, 并与实验室高光谱和普通克里格分别进行准确度和制图结果比较, 从而评价无人机植被高光谱在南方高密度植被覆盖区反演SOM含量的可行性, 为农田尺度智慧农业、 土壤质量监测与土壤资源可持续利用等领域提供高效、 廉价的土壤信息获取技术及其科学依据。
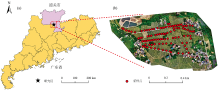
研究区地处广东省韶关市翁源县新江镇上坝村(113° 47'45″— 113° 48'33″E, 24° 28'47″— 24° 28'22″N), 位于低丘的沟谷内, 面积约75公顷, 地势平坦, 海拔116~160 m, 如图1所示。 研究区气候属亚热带季风气候, 年均降水量约1 414 mm, 年均气温约21.3℃。 区域内土地利用类型为耕地, 主要种植甘蔗, 仅在北部和西部边缘的中间位置种植少量玉米、 水稻[如图1(b)北部单独的2个样点所处的田块]。 土壤类型为第四纪砂砾夹砂壤土发育的红壤[22]。
 | 图1 研究区地理位置(a)及无人机遥感影像和采样点(b)Fig.1 The location of the study area (a) and UAV images with sampling points (b) |
1.2.1 土壤样本采集与测定
土壤样本采集时间为2023年6月13日。 样点位置的选择主要依据网格法, 理论样点间距约为20 m, 并根据每个田块的实际情况进行局部调整, 共采集103个采样数据, 如图1(b)所示。 每个样点位置均用手机拍照记录, 以标记位置的坐标, 用于下文无人机高光谱的提取。 在每个样点1 m× 1 m贩围内, 随机采集3~5个0~15 cm深度的土壤样本, 混合均匀后带回实验室进行风干、 研磨、 过筛等一系列处理。 其中, 一部分用于重铬酸钾法测定SOM含量, 另一部分用于实验室高光谱数据测定。
1.2.2 无人机高光谱数据获取
无人机高光谱成像需要良好的天气条件, 但土壤采样时为夏季, 天气变化频繁且多雨水, 对高光谱成像有较大影响。 另一方面, 此时研究区里的农作物处于生长期, 农田施肥多而频繁, 且各田块由于所属的农户不同, 施肥时间和施肥量也有一定差异, 使得研究区里的农作物长势在土壤采样时本身已表现出一定差异。 显然, 这些差异不能有效地反映出SOM含量的空间差异。 因此, 选择作物成熟期且较长时间不施肥后、 天气良好的某天再进行无人机高光谱成像获取, 最终选择了2023年12月7日。 尽管土壤采样与无人机高光谱获取的时间上有间隔, 但SOM含量在土壤中比较稳定, 在没有极大外界因素干扰下, 经过几年之久才会有较显著的变化, 因而这段时间间隔里可认为SOM含量变化很微小。 另一方面, SOM含量能综合反应土壤肥力等状况, 而作物在成熟期的差异也正是土壤肥力等状况的综合结果。 因此, 作物成熟期获取的无人机高光谱是SOM含量的最有效反映。 本研究使用的无人机型号为Matrice 300 RTK, 搭载GaiaSky-mini3-VN高光谱成像仪, 光谱波段范围为400~1 000 nm, 光谱分辨率约为2.7 nm, 共计224个波段。 综合考虑影像空间分辨率、 研究区面积以及光照条件, 最终决定无人机航高为240 m(此高度下, 无人机影像的地面空间分辨率为0.15 m), 飞行时间为10:00至15:00的无云窗口期, 同时设置旁向与航向重叠为60%。
共采集了覆盖整个研究区的342幅高光谱成像影像。 考虑到光谱仪内部元件自身因素, 原始光谱数据在波长范围的两端信噪比通常较低, 因此, 剔除了400~410和990~1 000 nm 两个波段, 剩余214个有效光谱波段数。 随后, 这些高光谱影像用SpecView软件对每幅影像依次进行镜头校正、 反射率校正(光照变化)以及大气校正等预处理操作, 以减小大气及其他外部因素对光谱测量造成的影响, 再用HiRegistrator软件对所有影像进行几何精校正与全波段配准, 最后用AgisoftPhotoScan软件进行高光谱数据的镶嵌, 包括三角测量处理、 密集点云计算、 表面模型生成以及高光谱正射影像的生成。 从这些处理的影像上, 本研究提取出103个采样点位置上的光谱数据。
1.2.3 实验室高光谱数据测定
土壤样本经过风干、 研磨与过筛等处理后, 取一部分平铺于培养皿中, 再置于暗室内, 以两个50 W的卤素灯为光源, 用PSR+3500便携式地物光谱仪测定其高光谱数据。 光源与样本距离保持50 cm, 入射光倾斜角为25° , 并用BaSO4板进行定标。 光谱仪的波长范围为400~2 500 nm, 光谱分辨率为1 nm, 固定光纤垂直于土壤表面, 距离约10 cm。 每个样本随机选取3个点位测定, 取平均值作为最终的土壤样本光谱测量值。 为降低计算复杂度, 并与上述无人机光谱数据的维度进行匹配, 将实验室光谱分辨率重采样至10 nm。
同样地, 考虑原始光谱数据在波长范围的两端信噪比通常较低。 因此, 剔除了实验室高光谱数据中350~400和2 400~2 500 nm 两个光谱区间[23], 剩余的有效光谱波段数为205个。 在剔除这些高噪声光谱带后, 原始光谱带中仍存在部分随机噪声。 为进一步消除这部分噪声, 采用Savitzky-Golay(SG)滤波进行降噪处理[24], 其中多项式系数与窗口大小分别设置为2与11, 以保证光谱频谱的一致性。
高光谱数据具有很高的数据维度, 且相邻波段之间相关性较强, 易出现信息冗余的情况[25, 26]。 因此需要从大量的光谱数据中去除冗余信息, 同时最大限度地保留有用信息。 在众多数据降维方法中, 小波变换是一种较为有效的处理方法, 在诸多领域中有着广泛的应用。 数学原理上, 它是一种线性变换方法, 是将原始信号与经过不同尺度进行缩放和位移的基小波函数进行卷积运算, 从而实现高维数据降维的目的[27, 28]。 小波变换包括离散小波变换与CWT两种类型。 相较于离散小波变换, CWT以连续尺度和连续位移的方式与光谱进行卷积运算, 具有分辨率高、 信息无损等优点, 因而在分解类似高光谱这样的多维数据中具有更广泛的应用[29, 30]。 因此, 采用CWT进行特征波段提取。 CWT公式表示如式(1)
式(1)中, f(t)(t=1, 2, 3, …, 代表信号波段数)表示原始信号; φ * (t)是小波函数φ (t)的复共轭函数; a表示尺度参数, 控制小波函数的尺度; b表示平移参数, 控制小波函数在波段轴上的位置。
由于土壤光谱吸收特征与高斯函数相似, 而植被光谱吸收特征与高斯函数的二阶微分相似, 因此选取墨西哥帽小波(mexican hat wavelet)作为基小波函数[31, 32, 33]。 CWT的主要分解结果— — 小波系数(wavelet coefficients)— — 一般随着尺度的变大, 所蕴含的细节越来越少, 低频细节信号主要在小尺度上。 大量应用CWT的研究中, 尺度一般在7以下。 因此, 本研究也设定7个分解尺度(即2, 22, 23, 24, 25, 26, 27, 下文用尺度1~7表示)[13]。 用python进行CWT运算, 并进一步进行光谱特征的选择, 包括以下3个步骤:
(1)首先, 用MexicanHat小波函数在7个尺度上对光谱反射率进行内积运算, 得到不同尺度上的小波系数;
(2)然后, 计算不同尺度上小波系数与SOM含量的斯皮尔曼相关系数;
(3)最后, 对相关系数的绝对值进行升序排列, 提取出前1%的小波系数特征波段, 作为下文SOM含量预测模型中的预测变量。
分别用无人机植被高光谱和实验室土壤高光谱以及它们的CWT特征波段, 构建多个SOM含量的预测模型, 其预测变量组合包括: (1)无人机植被高光谱全波段; (2)实验室土壤高光谱全波段; (3)无人机植被高光谱CWT特征波段; (4)实验室土壤高光谱CWT特征波段; (5)无人机植被高光谱全波段和实验室土壤高光谱全波段; (6)无人机植被高光谱CWT特征波段和实验室土壤高光谱CWT特征波段。 前4个模型是研究中常用的模型, 后2个模型是为了探究不同光谱组合的有效性。 例如, 宋奇等[2]将原位土壤高光谱、 实验室土壤高光谱与无人机土壤高光谱结合, 用光谱直接转换法对后者进行转换后再反演SOM含量时, 准确度明显提高, 与实验室高光谱反演SOM含量的准确度接近。
在以上6个变量组合的基础上, 用RF建立预测模型。 RF是由Breiman于2001年提出的集成模型算法[34], 由多棵分类与回归树所构成, 其在处理非线性多维数据上具有独特的优势性, 是目前应用最广泛且准确度较高的一种机器学习算法。 该算法在大数据集处理上表现出了优越性能, 例如能有效地避免模型的不稳定性和过拟合现象[35]。 构建RF模型中, 主要的参数包括分类器的数量(即树的数量)、 随机变量的数量, 以及决策树最大深度[35, 36]。 本研究用格网搜索法确定上述模型参数的最优组合。
为了验证模型的准确度, 通过分层抽样法将103个样本划分为训练集与验证集, 前者用于建立模型, 后者用于计算模型得准确度, 包括以下三个评价指标— — 决定系数R2、 均方根误差(root mean square error, RMSE)以及一致性相关系数(concordance correlation coefficient, CCC)
式(2)— 式(4)中, n为样本量; yi与Yi分别为实测值与预测值;
为了评价基于无人机植被高光谱反演SOM含量空间分布的有效性, 在以上训练集与验证集划分的基础上, 用无人机植被高光谱数据的2个模型(即上文中第1、 3个模型)以及普通克里格方法对研究区的SOM含量空间分布进行预测制图。
表1展示了103个土壤样本的SOM含量统计结果。 其均值为22.28 g· kg-1, 最小值为15.81 g· kg-1, 最大值为45.63 g· kg-1。 这些结果表明本研究区内SOM含量整体水平并不高。 McCray等[37]的研究表明, 较高的SOM含量与甘蔗良好生长相关, 而当SOM含量低于11 g· kg-1时, 甘蔗产量显著下降。 表1中本研究区的SOM含量最低为15.81 g· kg-1, 可见本研究区较为适合种植甘蔗。 表中103个土壤样本的SOM含量变异系数为21.86%, 呈现出中等程度的变异。 同时, 这也间接说明本研究区的甘蔗生长很可能也有中等程度的变异。 因此, 本研究区的SOM含量和植被情况适合开展无人机植被高光谱反演SOM含量的可行性研究。 表1中的峰度和偏度结果说明SOM含量的总体分布不符合正态分布, 但本研究采用RF模型, 因而不影响本研究的模型建立与验证。
| 表1 SOM含量统计值 Table 1 Statistical metrics of SOM characteristics |
表1同时还列出了用分层随机抽样法所得到的训练集与验证集上SOM含量的统计结果。 可以看到, 训练集和验证集的各项统计指标与全部样本相比, 并无显著差异。 这说明训练集与验证集对全部样本具有较充分的代表性, 能够有效支撑后续的模型构建与准确度评价。
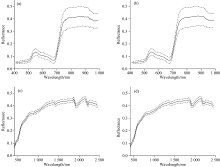
图2展示了103个样点上无人机植被高光谱和实验室土壤高光谱原始数据及其SG滤波后的平均值。 可以看到, 高光谱原始数据在局部波段范围有一定的上下突变, 而SG滤波后光谱曲线基本平滑过渡。 可见, SG滤波有助于光谱消除常见于原始光谱数据中的噪声信号。 因此, 以SG滤波后的光谱进行后续分析和建模及预测制图。 在图2中, 植被高光谱和土壤高光谱反射率值比较接近, 都在0.075至0.5范围内, 但两者的光谱形态截然不同, 分别展现出研究文献里常见的植被和土壤光谱特征[38, 39]。 在图2(b)中, 植被高光谱在400~500 nm的紫、 蓝光等可见光波段反射率较低; 随后在500~600 nm的黄、 绿光等波段出现明显的反射峰, 表现出与叶绿素、 胡萝卜素相关的光谱吸收与反射特征[40]; 接着在600~700 nm蓝光等波段又出现反射率低谷, 然后在700~780 nm范围内呈现出反射率快速升高的过程, 即红边效应[41]; 最后在780~900 nm波段保持平稳且较高的反射率之后, 在900~1 000 nm的近红外波段出现反射率低谷, 表现出与叶肉细胞的特定结构密切相关(如细胞壁与气腔)的光散射特征[42]。 在图2(d)中, 土壤高光谱总体上在450~800 nm的可见光波段呈现迅速上升趋势, 在800~1 800 nm的短波红外波段处于平稳状态, 而在1 800~2 500 nm出现起伏但总体略微下降趋势。 在这一变化过程中, 土壤光谱在局部位置表现出与SOM明显相关的吸收谷和反射峰。 例如, SOM的主要成分为热解性碳、 腐殖质等, 颜色较深, 使得土壤光谱400~700 nm可见光波段范围整体反射率很低; SOM富含O— H与C=H官能团, 使得1 400、 1 900和2 200 nm处出现吸收谷; SOM中腐殖质、 木质素以及蛋白质相关的有机成分使得2 100~2 350 nm处出现吸收谷, 而蕴含的多种有机官能团使得2 400~2 500 nm处出现重叠复合吸收谷[43, 44]。
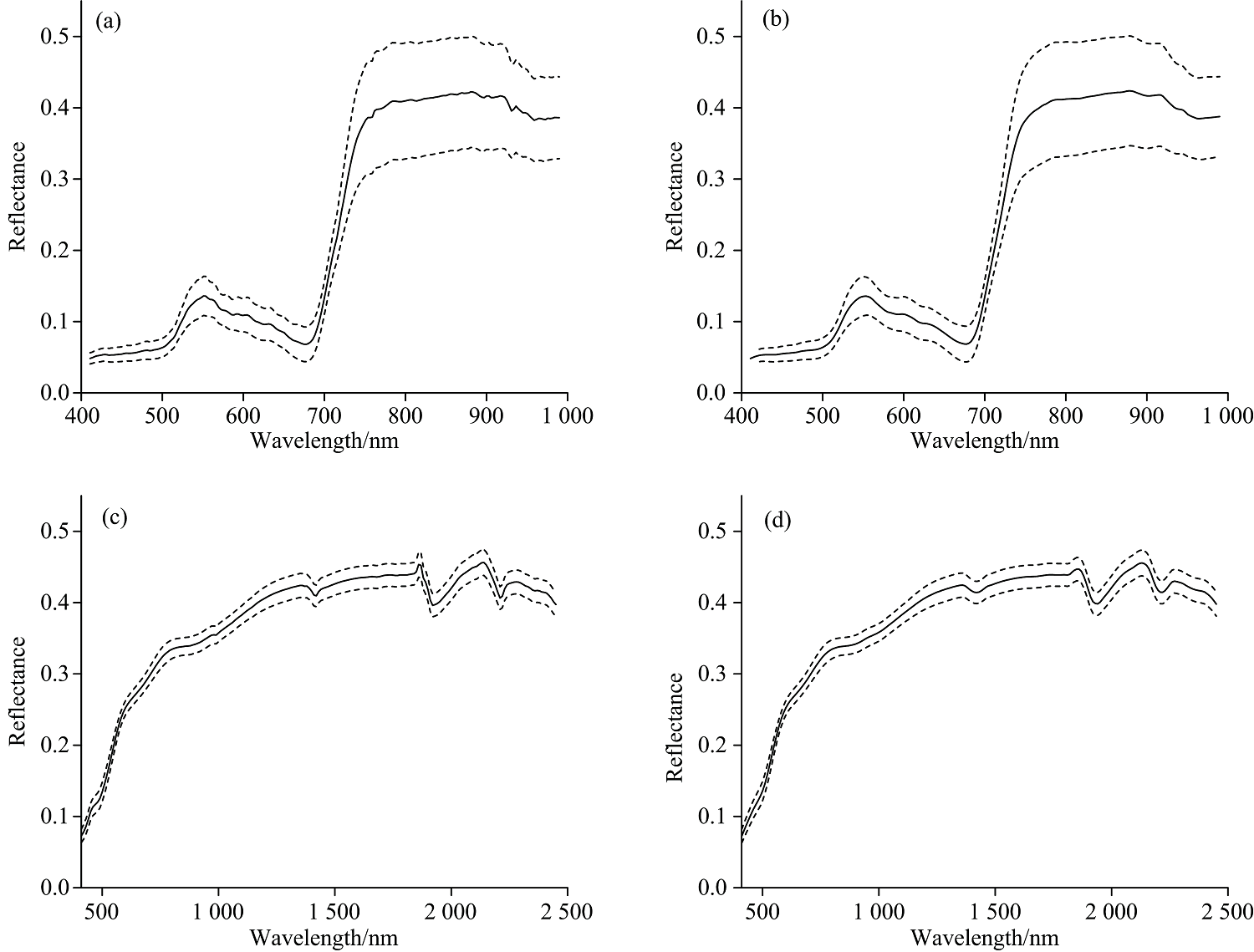 | 图2 采样点原始高光谱及其SG滤波后的均值与标准差 |
图2还展示了103个样点上无人机植被高光谱和实验室土壤高光谱在每个波段上的标准偏差。 可见, 无人机植被高光谱的标准偏差较大, 特别是在800~1 000 nm波段上。 这反映出研究区内作物冠层存在显著差异, 也表明无人机植被高光谱能有效地反映出这种差异, 尽管一部分差异可归因为无人机飞行时段内的光照条件差异、 无人机飞行不稳定性等等。 相反, 图2(d)中, 土壤高光谱的标准偏差很小。 然而, 表1中的结果已说明本研究区的SOM含量存在较明显的空间差异。 一方面, 这可能说明与土壤高光谱相比, 无人机植被高光谱可能因为植物生长而放大了SOM含量的差异, 使得植被高光谱能清楚地反映出SOM含量的空间差异。 然而, 另一方面, 这也可能是因为植被生长时不仅受到SOM的影响, 还受到土壤的很多其他方面以及农田管理方式如施肥、 耕作、 灌排等的影响, 使得植物光谱不仅与SOM含量有关, 还与很多其他因素有关, 包括无人机飞行时段内的光照条件。
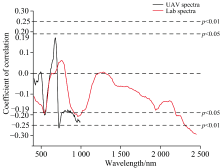
图3展示了经SG滤波处理后的无人机植被高光谱、 实验室土壤高光谱数据与SOM含量之间的相关性。 总体上, 二者与SOM含量的线性相关性较低, 相关性系数介于-0.29到0.16之间。 其中, 在540~554、 712~765和872~990 nm波段区间内, 无人机植被高光谱反射率与SOM含量的相关性在统计学0.05水平上具有显著性, 这些波段数量占总波段数的31.9%。 在极少数的波段(如729和732 nm), 无人机植被高光谱反射率与SOM含量的相关性在统计学0.01水平上显著。 在920~1 010、 2 190~2 400 nm波段范围内, 实验室土壤高光谱与SOM含量的相关性在统计学0.05水平上显著, 此部分波段占总波段数的14.5%。 同样地, 在个别波段上(如2 340~2 400 nm等), 实验室土壤高光谱与SOM含量的相关性在统计学0.01水平上显著。
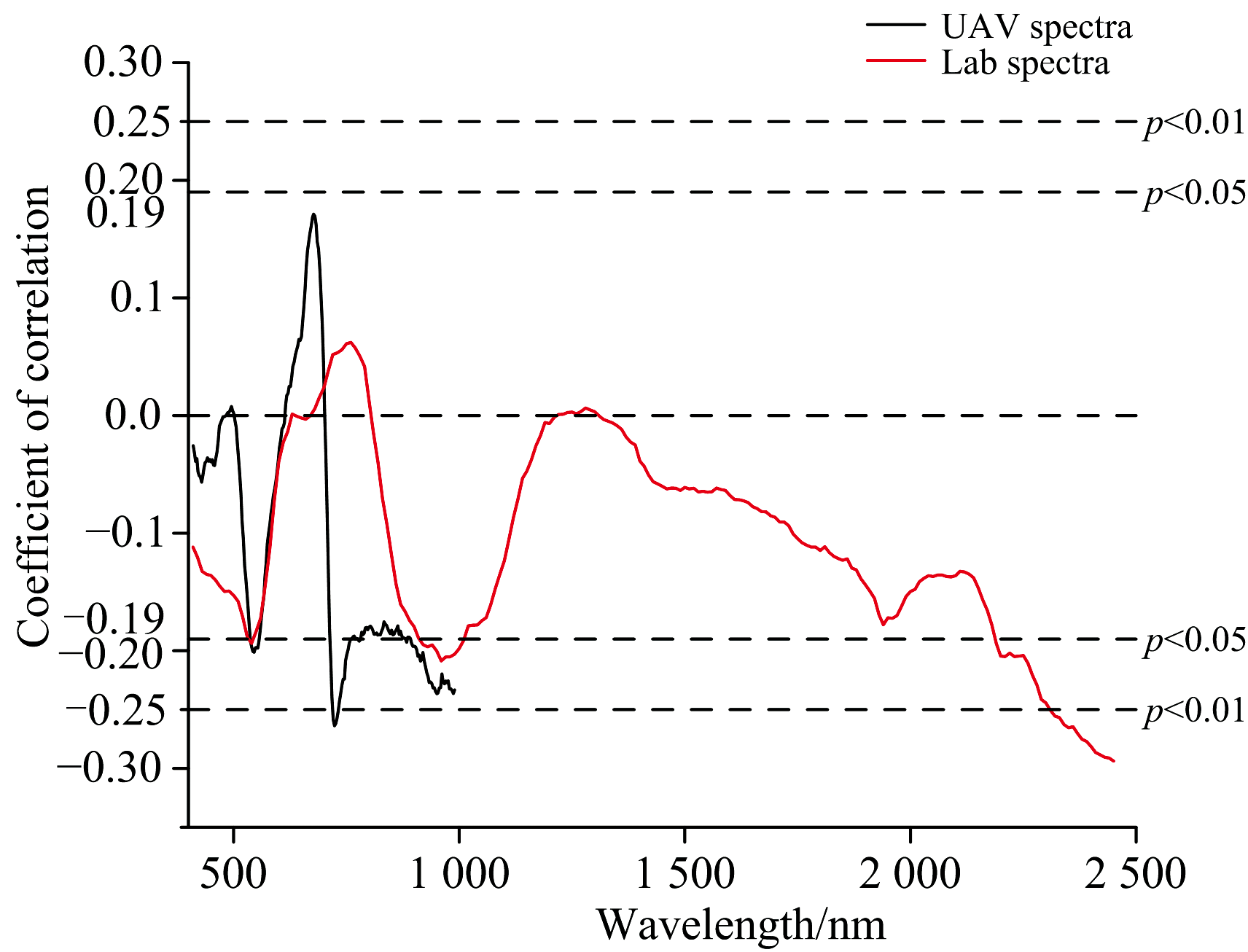 | 图3 无人机植被高光谱和实验室土壤高光谱与SOM含量之间的相关系数 |
夏晨真等[17]利用无人机获取了黑土区玉米拔节期与吐丝期的植被高光谱数据, 并在450~950 nm波段内, 针对这
两个时期的高光谱数据与SOM含量之间的相关性展开了对比分析。 研究结果表明, 这两个时期数据与SOM含量的相关性均处于较低水平, 相关系数仅介于-0.1至0.3之间。 Hong等[13]分析了无人机土壤高光谱数据、 实验室土壤高光谱数据与土壤有机碳之间的相关性, 结果表明在400~1 000 nm 波段, 无人机土壤高光谱与土壤有机碳的相关性系数绝对值介于0.26~0.73之间, 而实验室土壤高光谱与土壤有机碳的相关性绝对值介于0.36~0.78之间。 Jin等[12]对比了实验室土壤高光谱、 卫星高光谱数据和土壤有机碳之间的相关性, 结果表明在400~2 500 nm波段范围内, 实验室土壤高光谱数据与土壤有机碳的相关性绝对值介于0.11~0.67之间, 而卫星高光谱数据与土壤有机碳的相关性绝对值介于0~0.19之间。
可见, 本研究中无人机植被高光谱数据与SOM含量的相关性与上述研究结果相近。 然而, 实验室土壤高光谱数据的相关性却低于上述研究。 原因可能是由于土壤类型的差异, 不同土壤类型的光谱特性存在显著差异[45]。 本研究区的土壤类型主要为红壤, 质地粘重; Hong等[13]研究的土壤类型主要为壤土与粉壤土; Jin等[12]研究的土壤类型主要为寒潮土。 此外, 不同的数据处理方法与样本量和分布的差异也可能是影响相关性结果的因素。
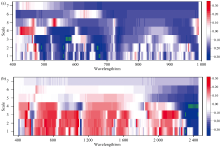
图4展示了无人机植被高光谱数据和实验室土壤高光谱数据经过CWT分解后, 与SOM含量的相关性系数。 在尺度1~4上, 随着尺度增加, CWT分解的无人机植被高光谱与SOM含量的相关性系数处于-0.3以下的波段数量不断增加。 例如, 图4(a)中, 在550 nm波长附近, 与SOM含量相关性增强的波段数量呈逐步上升趋势, 具体表现为该波长附近的蓝色区域自下而上逐渐增多。 尤其是在750~980 nm区间, 与SOM含量相关性较低的波段随着尺度的增大而讯速减少, 在尺度达到5及以上时, 此区间内的绝大部分波段均与SOM含量有显著的相关性。 然而, 在尺度5及以上后, 随着尺度进一步增加, CWT分解的无人机植被高光谱在大部分波段与SOM含量的相关性有所降低, 表现在图4(a)中尺度5及以上的颜色变浅。 同样的, 在尺度1~4, 实验室土壤高光谱[图4(b)]经过CWT分解后, 在许多波段与SOM含量的相关性得到了提升, 而在尺度5及以上后, 大部分波段的光谱反射率与SOM含量相关性逐渐降低。 总体上, CWT多尺度分解在特定尺度上能有效提高无人机植被高光谱以及实验室土壤高光谱与SOM含量之间的相关性。
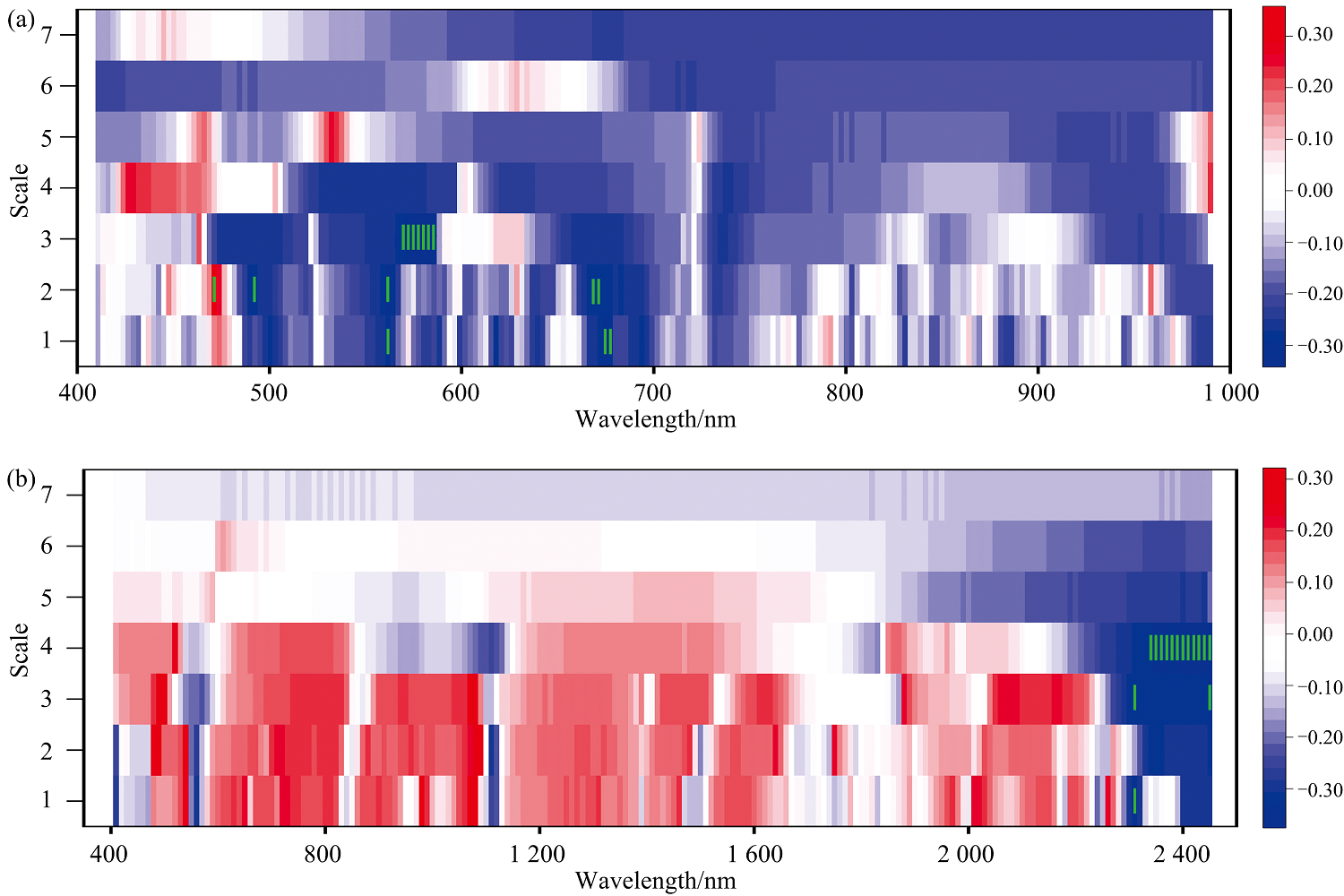 | 图4 无人机植被高光谱(a)和实验室土壤高光谱(b)CWT分解系数与SOM之间的相关系数 |
上述研究结果与已有的研究高度相似。 例如, Hong等[13]用CWT分别对无人机和实验室土壤高光谱进行分解, 结果同样显示, 随着尺度增大, 与SOM含量具有较高相关性的波段数量逐渐增多。 勾宇轩等[46]通过CWT对多种类型的实验室土壤高光谱进行分解处理, 结果表明, 处理后的高光谱数据与SOM含量的相关性明显高于原始高光谱。 龚明冲等[47]的研究结果也表明, 原始高光谱数据经CWT 处理后, 与土壤有机碳含量的相关系数最大绝对值提升了约0.14。 很多应用了CWT的研究认为, 经过CWT处理后, 原始信号中多个不同频率的信号被逐一分解出来。 其中一些波段在部分频率上的分解信号可能特定地表征某些信息, 例如本研究的SOM含量, 因而SOM含量与其相关性比分解前同一波段处的信号要高[47, 48]。 这是因为在分解前, 这些波段的信号还夹杂有其他频率的信号, 表征的是其他方面的信息, 与SOM含量可能不相关。 因此, 这些不同的信息混杂后, 使得不同的相关性互相中和, 导致原始光谱与SOM含量的相关性并不高[49]。 王延仓等[48]总结认为, 有效光谱信息的分解尺度还与光谱分辨率相关, 随着光谱分辨率的降低, 有效信息的分解尺度需逐步升高, 因为宽波段的有效信息可能没有被分解出来, 因此适当加大分解尺度才能有效地挖掘出其中更多的隐含信息。 这可能是图4中无人机植被高光谱特征变量主要集中在尺度1~3而实验室土壤高光谱特征变量主要集中在尺度4的主要原因, 因为无人机植被高光谱的光谱分辨率高于实验室土壤高光谱。
以上讨论中, 某些频率能特定地表征某些信息的波段常被称为特征波段[47, 48, 49, 50]。 基于图4(a)与图4(b)中相关性分析结果, 按照Hong等[13]的方法, 从无人机植被高光谱与实验室土壤高光谱中分别筛选出与SOM含量相关性系数绝对值最大的前1%波段, 即各提取15个波段(两种光谱分别共有204与214个波段, 每个波段有7个尺度的分解系数, 因此它们的1%约为15), 作为SOM含量的特征波段, 用于构建SOM含量的预测模型。 这两组特征波段的分布情况, 如图4中的亮绿色标识所示。 无人机植被高光谱中的特征波段主要集中在470~680 nm之间, 实验室土壤高光谱中的特征波段主要集中在2 310~2 450 nm之间。
图5分别展示了基于无人机植被高光谱、 实验室土壤高光谱全波段和CWT提取后的特征波段所构建的RF模型的准确度评价结果。 首先, 基于无人机植被高光谱的模型准确度要略低于基于实验室土壤高光谱。 以验证集CCC为例, 全波段情况下, 前者比后者低9.1%[图5(a)与(c)相比]; CWT提取特征波段后, 前者比后者分别低11.8%[图5(b)与(d)相比]。 这与Hong[13]等的研究结果一致。 然后, 基于两种高光谱结合的模型的准确度, 均比仅基于无人机植被或实验室土壤高光谱的模型具有较大幅度的提升。 以CCC为例, 全波段情况下, 两种高光谱结合的模型准确度[图5(e)]比仅用无人机植被高光谱[图5(a)]时高23.6%, 比仅用实验室土壤高光谱[图5(c)]时高13.3%; CWT提取特征波段后, 增幅分别为15.0%[图5(f)与(b)相比]与5.0%[图5(f)与(d)相比]。 另外, CWT提取的特征波段也显著提高了模型的准确度。 以CCC为例, 经过CWT提取特征波段后, 基于无人机植被高光谱的模型准确度提高了23.6%[图5(a)与(b)相比]; 基于实验室土壤高光谱数据的模型准确度提高了26.7%[图5(c)与(d)相比]; 基于两种高光谱数据的模型准确度提高了17.6%[图5(e)与(f)相比]。
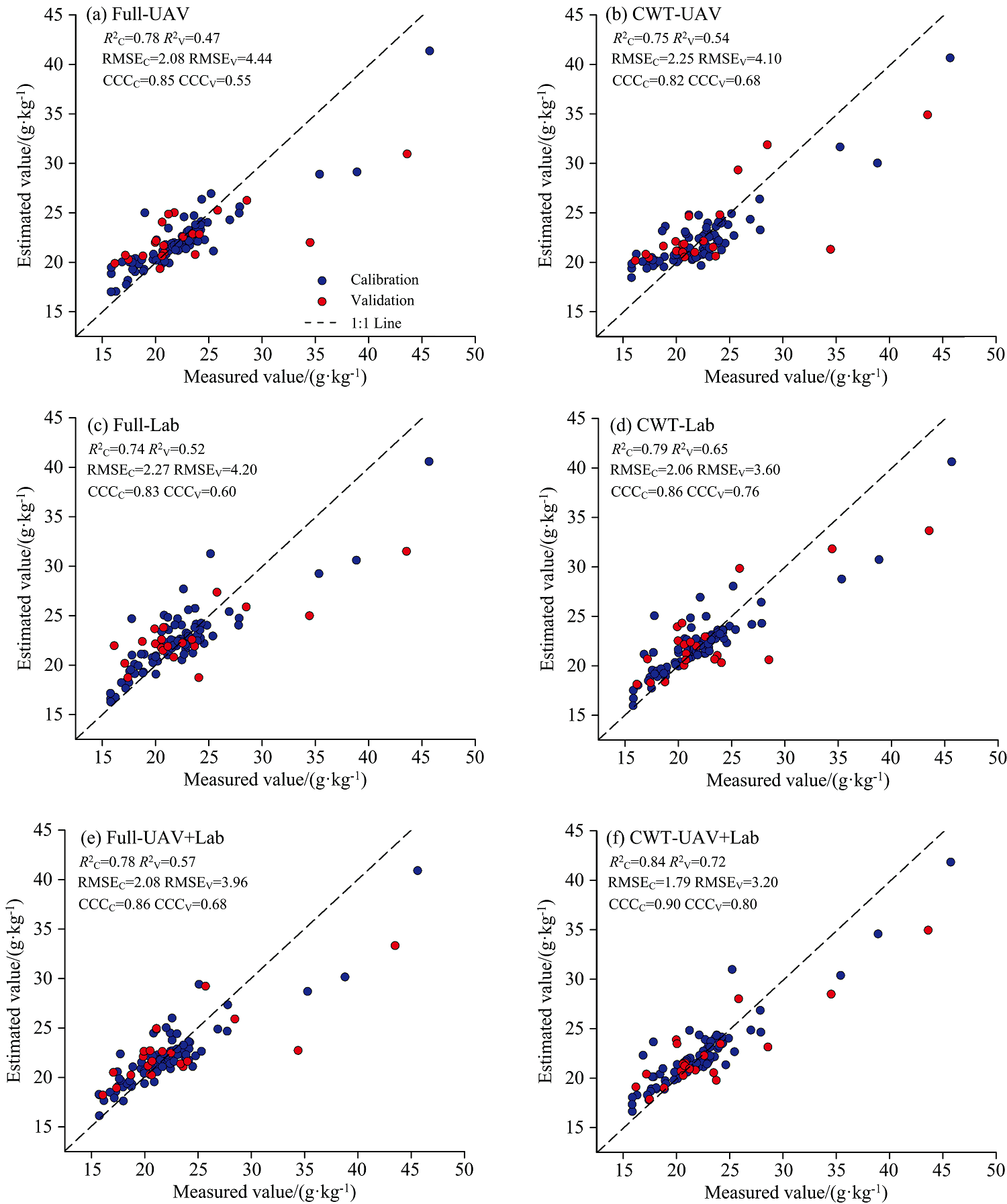 | 图5 模型预测散点图及准确度评价结果Fig.5 The scatter plots of model prediction and accuracy evaluation results |
以上结果表明, 用无人机植被高光谱预测SOM含量具有一定的准确度, 其准确度比基于实验室土壤高光谱的准确度仅仅低约10%。 以CCC为例, 在CWT提取特征波段前后, 其准确度分别低约9.1%[图5(a)与(c)相比]与11.8%[图5(b)与(b)相比]。 值得一提的是, 从无人机植被高光谱数据中, 用CWT提取出与SOM含量相关的特征波段后, 模型准确度超过了用实验室土壤全波段高光谱数据预测SOM含量的准确度[图5(b)与(c)相比]。 无人机植被高光谱预测SOM含量的良好准确性表面上可归因为上述两者之间的统计学显著相关性, 实际上可归因为植被高光谱对植被信息的高维度、 高精度、 全方面反映, 如植物营养状况。 这些植被信息显然是土壤肥力等状况的直接反映, 因为植被的生长状况很大程度上受土壤状况的控制。 在实际的农业科学研究及生产中, 人们早已总结出了一套通过植物叶片颜色(即可见光波段)来判断植物营养状况的规律, 从而针对性地向土壤中施肥, 补充营养元素。 例如, 植物老叶黄化是缺氮的标志, 新叶发黄则可能是缺铁或镁的主要症状。 SOM含量与植物生长有着较强的联系, 较多学者对此已进行了深入的机理分析。 例如Jenny等[50]对叶片氮浓度(LNC)与土壤氮相关指标(主要存储于SOM中)的机理进行了研究, 结果表明, 当LNC充足时, 植物可以更好地合成叶绿素, 而SOM分解过程中会释放氮素, 为植物提供可吸收的氮源, 从而间接地影响LNC, 进而影响叶绿素浓度, 进一步影响叶片对500~600 nm 的绿光波段和680~750 nm的红边波段的吸收与反射[51]。 在图3中, SOM含量与这些波段上的相关性均达到了统计学显著性水平。 与实际生产和生活中的肉眼法判断植物营养和缺素症状相比, 本研究的无人机植被高光谱显然具有诸多优势, 例如波段范围更宽、 更精细、 更灵敏。 因此, 无人机植被高光谱能较为准确地通过植被状况来反映土壤状况, 具有较强的科学性和合理性。
无人机植被高光谱预测SOM含量的良好准确性表明其在未来获取SOM含量空间分布方面有较好的应用前景。 而且, 这种方式还具有传统获取土壤信息方式所不具备的多方面优势, 例如无需土壤采样、 研磨、 过筛、 实验室测定等等一系列费时、 费力的过程。 因此, 在高效、 低成本和可重复性方面具有明显的优势。 这些优势能满足未来智慧农业等领域对大量且频繁获取土壤信息的需求。 此外, 无人机植被高光谱与实验室土壤高光谱相结合, 尤其是两者的特征波段相结合后, 模型准确度显著提高, CCC可达0.80, RMSE仅占验证集中SOM含量平均值的14.0%[图5(f)]。 这一结果说明土壤高光谱协同植被高光谱有望进一步提高SOM含量的预测准确性, 可进一步提高实际应用性。
然而, 这套方法在多个方面还具有一定的局限性, 在应用之前还需进行深入研究来改进。 首先, 无人机植被高光谱获取时难以实现实验室土壤高光谱测定那样可控制的光照条件, 会受到太阳光强弱、 入射角度以及大气条件等空间不均匀性的影响, 同时还有无人机飞行时不稳定性的影响, 给无人机植被高光谱数据带入较多的误差。 例如本研究中无人机飞行时间为10点至15点, 太阳光强弱、 入射角一直在变化中。 然后, 无人机植被高光谱数据中, 还包括有植被冠层间的阴影、 空隙等的影响, 给无人机植被高光谱数据带入较多噪声。 王曦等[15]研究表明, 通过对无人机影像进行滤波处理, 将点位的高光谱数据转换为范围的植被高光谱数据, 能有效去除噪声信息, 并且能达到比基于裸土建立的反演模型更高的准确度。 因此, 未来可应用噪声处理方法对无人机植被高光谱影像进行处理, 从而提高无人机植被高光谱反演土壤信息的质量和准确性。 最后, 本研究为了避免农田管理方式如施肥、 灌溉等空间差异造成的植物光谱差异, 选择在作物生长的成熟期进行植物高光谱测定。 但即使这样, 这种影响很难完全避免。 未来, 还需探讨在其他作物生长期进行应用时, 如何降低或避免非土壤自身因素如施肥、 灌溉等造成的作物光谱差异, 从而更精准地获取土壤信息。
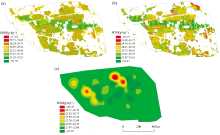
分别用无人机植被高光谱全波段以及经CWT提取的特征波段构建RF模型, 进而预测研究区SOM含量的空间分布图, 如图6(a)与(b)所示。 总体上, 两个模型的预测结果非常相似, SOM含量主要集中在20~30 g· kg-1, 其中东北部以及东南部地区的SOM含量较高, 中间小部分区域SOM含量较低。 两个模型在局部位置上有一定差异, 主要表现在较多的局部位置上SOM含量较高, 例如东北角上。 为了进一步评价无人机植被高光谱在南方高密度植被覆盖区反演SOM含量的可行性, 基于训练集, 用普通克里格方法预测制图了研究区的SOM含量空间分布, 如图6(c)所示。 可见, 普通克里格方法仅能体现出SOM含量的空间分布趋势, 并未体现出图6(a)和(b)中大量的细节信息。 在验证数据集上对普通克里格的预测制图结果进行了准确度评价, 结果显示, R2为0.39, RMSE为4.78 g· kg-1, CCC为0.46。 可见, 这些准确度指标远低于图5中基于无人机植被高光谱全波段和CWT提取的特征波段预测SOM含量的准确度。
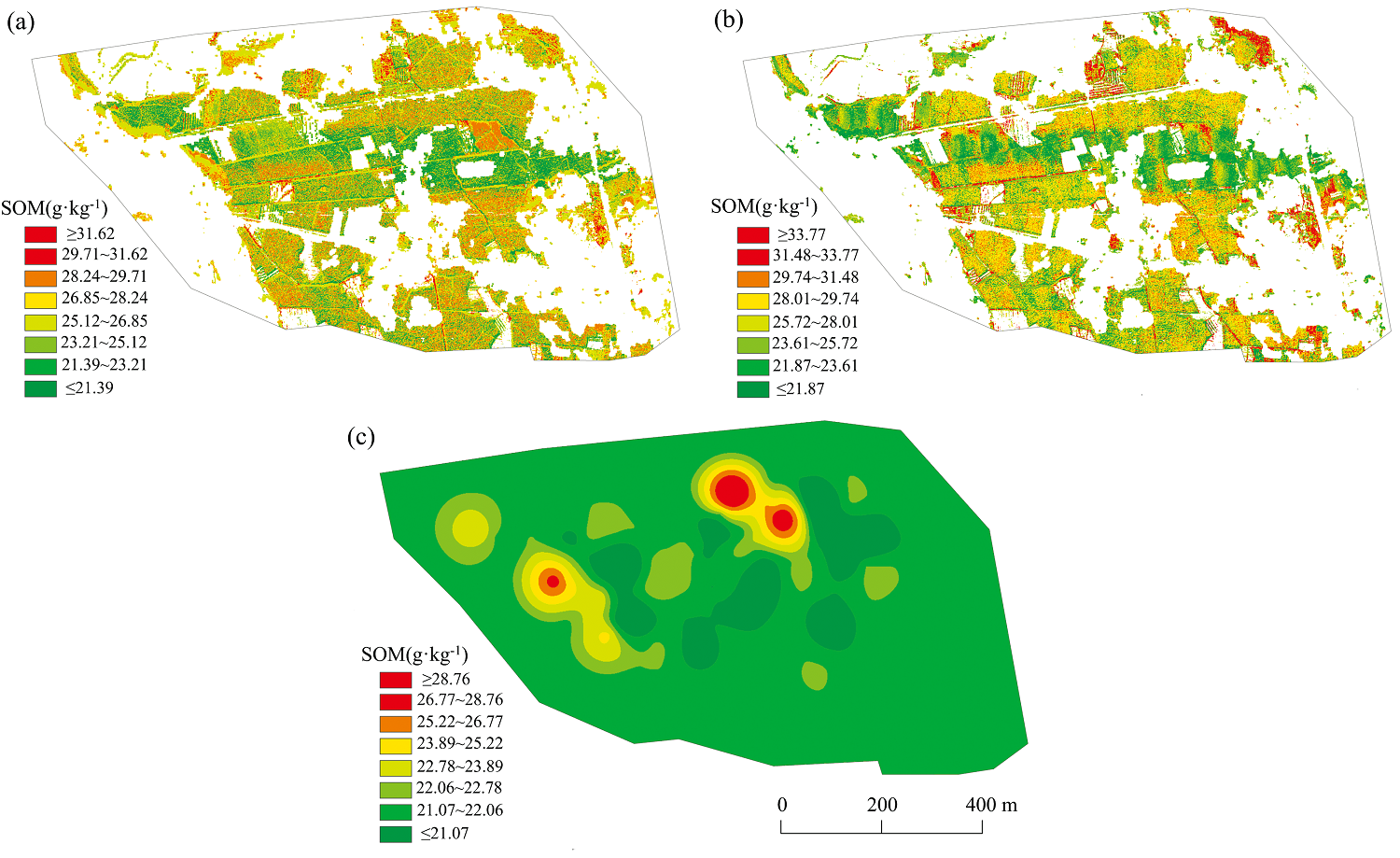 | 图6 基于无人机植被全波段高光谱的RF模型(a)、 CWT特征波段的RF模型(b)及普通克里格(c)预测的SOM含量空间分布 |
由以上对比可知, 与常用于田块尺度土壤属性空间预测制图的普通克里格方法相比, 基于无人机植被高光谱构建的RF模型预测制图SOM含量不仅能更精细地体现出SOM含量的空间分布, 还具有更高的准确度。 首先, 这是因为无人机植被高光谱影像具有0.15 m的精细空间分辨率, 能获取到与SOM含量有关的局部微小差异, 因而能够精细地反映出SOM含量局部详尽的信息。 然后, 无人机植被高光谱数据与SOM含量有着较高的相关性(如上所述), 为预测SOM含量提供了良好的辅助信息支撑。 与之相对应的是, 普通克里格方法仅依赖数据之间的空间结构性模型, 不考虑客观实际存在的、 能表征土壤情况的植被信息。 因此, 本研究认为, 基于无人机植被高光谱构建的RF模型在SOM含量空间预测制图上具有较好的可行性。
同时, 本工作也认为, 在应用该方法进行预测制图时, 还需消除植被高光谱数据中的误差和噪声, 包括上述已讨论的误差和噪声来源(如太阳光入射强弱与角度的空间差异、 植被冠层的阴影和空隙、 飞行的不稳定性及其他非土壤自身因素等)。 这可能是图6(a)和(b)中, SOM含量高值与低值在局部范围内高频混合分布的主要原因之一。 因此, 未来还需要开展植被高光谱数据中的误差和噪声研究, 得到精准的植被高光谱数据, 从而得到更精准的土壤信息。
探讨了在高密度植被覆盖区农田尺度上无人机植被高光谱反演SOM含量及制图方法的可行性。 研究结果表明, 基于无人机植被高光谱数据的预测方法, 其全波段高光谱的预测准确度略低于基于实验室土壤全波段高光谱数据的方法; 然而, 经过CWT提取特征波段后, 其准确度要优于后者。 同时, 当利用无人机植被高光谱与实验室土壤高光谱数据进行协同预测时, 模型的准确度均显著优于单独使用任何一种高光谱数据的预测准确度。 特别是, 当同时使用CWT提取的两种高光谱的特征波段进行SOM含量预测与制图时, 准确度提高幅度较大, 其CCC可达0.80。 此外, 相较于实验室土壤高光谱数据, 基于无人机植被高光谱数据预测SOM含量还具备无损、 高效与廉价等显著优势, 并能精细地揭示农田尺度上SOM含量的空间分布特征, 且制图准确度远高于传统的普通克里格方法。 因此, 在我国南方高密度植被覆盖区, 无人机植被高光谱反演SOM含量及制图方法在一定程度上能为当前蓬勃发展的智慧农业等领域提供大量、 快速、 准确的土壤信息, 具有广阔的应用前景。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
|
| [30] |
|
| [31] |
|
| [32] |
|
| [33] |
|
| [34] |
|
| [35] |
|
| [36] |
|
| [37] |
|
| [38] |
|
| [39] |
|
| [40] |
|
| [41] |
|
| [42] |
|
| [43] |
|
| [44] |
|
| [45] |
|
| [46] |
|
| [47] |
|
| [48] |
|
| [49] |
|
| [50] |
|
| [51] |
|
| [52] |
|
| [53] |
|