
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
ZY1-02D AHSI影像归一化阴影植被指数NSVI的波段选择及其构建
[许章华1, 2, 3, 4  , 陈玲燕
, 陈玲燕1, 4, 5 , 项颂阳1, 4, 5 , 邓西鹏6 , 李一帆1, 2 , 俞辉1, 4, 5 , 贺安琪1, 2 , 李增禄3, 7 , 郭孝玉3 ]
, 陈玲燕|
|


作者简介: 许章华, 1985年生,福州大学地理与生态环境研究院、环境与与安全工程学院教授 e-mail: fafuxzh@163.com
高光谱影像具有连续的地物光谱信息, 在阴影检测方面具有巨大的潜力, 而波段冗余度高需进行波段优选。 归一化阴影植被指数(NSVI)能够扩大光谱差异, 在高光谱影像中应用NSVI将更有效地识别阴影。 资源一号02D卫星是我国首颗自主研发并成功运行的高光谱业务卫星, 数据信噪比大、 覆盖能力强, 对该高光谱影像进行准确的阴影检测具有重要意义。 以ZY1-02DAHSI影像为试验数据, 提取并分析明亮区植被、 阴影区植被及水体的光谱反射率; 结合竞争自适应重加权采样(CARS)和连续投影算法(SPA)筛选能够有效区分典型地物的主要波段, 综合考虑算法的特性进一步选出特征波段构建NSVI; 通过步长法确定最佳阈值对影像进行分类, 从像元值分布情况、 分类精度和光谱增强效果等对比出构建NSVI的最佳波段, 并结合不同的阴影指数、 波段和影像进行综合评价, 验证该方法的意义及普适性。 结果表明: 波段32和波段73是构建NSVI的最佳波段, 分别对应红光波段和近红外波段; 不同波段构建的NSVI分类精度均高于90%, 由最佳波段构建的NSVI分类精度为94.33%, Kappa系数为0.832 8, 分类效果最优; NSVI能够增强典型地物间的光谱差异并缓解归一化植被指数的“易饱和”现象, 在该影像中因水体累积产生的小波峰有助于提取水体; 在ZY1-02DAHSI影像中NSVI的分类效果优于归一化阴影指数和阴影指数, 于另一景影像的分类精度也达到93.55%, Kappa系数为0.816 7。 由算法筛选出的波段具有一定的代表性, 最佳波段构建的NSVI在ZY1-02D AHSI影像中具有较好的阴影检测能力, 对高光谱影像阴影检测及构建植被指数具有一定的借鉴和参考意义。
, CHEN Ling-yanHyperspectral images have continuous spectral information of features and have great potential for shadow detection, but high band redundancy requires band preference. Normalized Shaded Vegetation Index (NSVI) can expand the spectral difference, and the application of NSVI in hyperspectral images will identify shadows more effectively. ZY1-02D satellite is the first hyperspectral operational satellite independently developed and successfully operated in China, with a large data signal-to-noise ratio and strong coverage capability, and it is important to perform accurate shadow detection on this hyperspectral image. In this paper, ZY1-02D AHSI images were used as experimental data to extract and analyze the spectral reflectance of vegetation in bright areas, vegetation in shaded areas and water bodies, and Combining Competitive Adaptive Reweighted Sampling (CARS) and Successive Projection Algorithm (SPA) to filter the main wavebands that can effectively distinguish typical features, the characteristics of the algorithms are considered to select the characteristic wavebands further to construct NSVI. The optimal threshold value is determined by the step method to classify the images, and the best band for constructing NSVI is compared in terms of image element value distribution, classification accuracy and spectral enhancement effect. A comprehensive evaluation is made by combining different shadow indices, bands and images to verify the significance and universality of the method in this paper. The results show that band 32 and band 73 are the best bands for NSVI construction, corresponding to the Red band and NIR band, respectively; the classification accuracy of NSVI constructed by different bands is generally higher than 90%, and the classification accuracy of NSVI constructed by the best band is 94.33% with a Kappa coefficient of 0.832 8, which is the best classification effect; NSVI can enhance the spectral difference between typical features and alleviate the “easy saturation” phenomenon of Normalized Difference Vegetation Index, and the small peaks generated by the accumulation of water bodies in this image is helpful to extract water bodies; The classification of NSVI in ZY1-02D AHSI image is better than Normalized Different Umbra Index and Shadow Index, and the classification accuracy in another scene image also reaches 93.55% with a kappa coefficient of 0.816 7; Therefore, the wavebands filtered by the algorithm are representative, and the NSVI constructed by the best waveband has better shadow detection ability in ZY1-02D AHSI images, which has a certain reference and significance for hyperspectral image shadow detection and construction of vegetation index.
阴影是遥感影像的基本特征之一, 是由于倾斜的光照和地物遮挡而在图像上形成的较暗区域, 有本影和落影之分, 本影是物体未被太阳照射的阴暗区域, 落影是物体经太阳照射产生的影子。 阴影的光谱反射率值较低, 信息含量少且难以分辨, 易对地物分类和影像匹配造成一定的干扰, 制约着遥感影像各方面的应用。 阴影检测有助于恢复地物原始信息, 提高遥感影像的质量, 在精准农业和城市建设等领域有重要作用[1]。 如何更好地识别阴影及提高分类精度成为本领域的研究热点之一。
目前, 国内外处理阴影的方法主要分为基于模型和属性两大类。 基于模型的阴影检测方法一般需要太阳方位角、 高度角和传感器观测角度等先验知识, 这类先验参数获取不易, 模型需要较为复杂的计算, 因此该方法在遥感图像阴影检测领域的广泛应用具有一定的局限性[2]。 学界更常用的是通过阴影本身的纹理、 亮度和光谱等属性之间的变化差异来检测阴影。 Mostafa等[3]在WorldView-2遥感卫星图像上构建了饱和强度阴影检测指数以区分阴影和深色物体; Ye等[4]利用建筑物纹理检测城市卫星影像阴影; Shi等[5]提出了对数归一化混合属性阴影指数用于高分辨率影像的阴影检测; 许章华等[6]构建了阴影植被指数(shaded vegetation index, SVI)并进一步深化为归一化阴影植被指数(normalized shaded vegetation index, NSVI), 该指数可扩大地物光谱差异, 能够有效区分阴影区植被和水体。 Badgley等[7]估算总初级生产力方法的表达式与SVI一致, 同时NSVI目前已被用于消除多光谱影像中苹果树冠层的阴影[8], 由此也进一步反映许章华等所构建SVI和NSVI的实用性。
有报道阴影检测方面取得了一定的成果, 但多以多光谱影像为数据源。 随着遥感影像光谱分辨率的快速提升, 地物的精细识别越来越依赖高光谱信息, 高光谱影像阴影识别日益得到关注。 Zhang等[9]提出一种基于非线性光谱解混的机载高光谱图像阴影检测与恢复的新框架; 肖斌等[10]在珠海一号高光谱影像中利用BP神经网络分类方法结合归一化植被指数(normalized difference vegetation index, NDVI)、 归一化水体指数(normalized difference water index, NDWI)和数字高程模型(digital elevation model, DEM)有效区分出水体和阴影。 由于高光谱影像包含大量波段、 冗余度高, 在构建指数时存在波段难以选择的问题, 除了选取常用波长外, 较为有效的方式是通过波段优选算法筛选特征波段。 孔钰如等[11]在无人机高光谱影像上运用连续投影算法(successive projection algorithm, SPA)、 最佳指数法(optimum index factor, OIF)和逐波段组合法(E)选择植被指数的特征波段, 由此构建的指数比常规波长构建的指数在估算叶面积指数方面精度更高; 有研究结合最佳指数法和偏最小二乘法选取含有Cu2+信息的特征波段构建指数监测铜污染, 证明该方法比其他指数的监测效果更优越。 上述均采用多种波段优选算法进行实验, 而胡新宇等[12]运用SPA对PROBA/CHRIS影像进行波段筛选构建NSVI, 虽证明了NSVI在该高光谱影像的适用性, 但该影像波段数相对较少且波段优选算法较单一, 代表性有所不足。
综上所述, 尽管高光谱影像已得到广泛应用, 波段优选算法也逐渐用于高光谱影像植被指数构建, 但在高光谱影像构建NSVI的研究仍不够深入。 ZY1-02D高光谱数据可提供丰富的光谱信息, 其信噪比较高、 幅宽较大, 目前主要用于地物分类和估测[13, 14, 15], 阴影检测的应用研究尚鲜见直接报道。 NSVI能有效识别山地丘陵的阴影区植被, 为进一步探究NSVI在高光谱影像上的应用价值, 尝试在ZY1-02D AHSI影像上结合两种波段优选算法选取特征波段构建NSVI, 并分析其在阴影检测方面的效果。
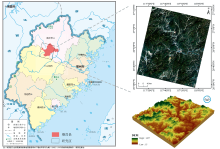
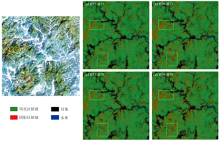
“ 资源一号” 02D(ZY1-02D)卫星是于2019年9月12日成功入轨的首颗民用高光谱业务卫星, 搭载可见近红外相机和高光谱相机, 空间分辨率为2.5 m/10 m, 细分为166个光谱通道(http://sasclouds.com)。 本研究采用的试验影像为2021年2月18日覆盖福建省顺昌县的AHSI影像, 中心经度117.75° E, 中心纬度26.83° N, 云量0。 该地多山地丘陵, 适合研究NSVI。 试验影像经辐射定标、 大气校正等预处理。 所采用的行政区划数据来源于自然资源部标准地图底图(http://bzdt.ch.mnr.gov.cn/index.html), DEM数据来源于地理空间数据云(http://www.gscloud.cn)。 试验影像及其区位和地形如图1所示, 其中, 试验影像由B29(637 nm)、 B19(551 nm)和B10(473 nm)合成。
 | 图1 试验影像(RGB: B29, B19, B10)及其区位和地形Fig.1 Test image (RGB: B29, B19, B10)and its location and terrain |
1.2.1 技术路线
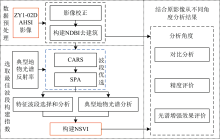
本研究的技术路线如图2所示, 包括3个主要步骤, 其中红色方框表示主要研究对象, 蓝色方框表示主要方法。 因建筑物反射率较为复杂, 采用归一化建筑指数(normalized difference water index, NDBI)对预处理后的ZY1-02D AHSI影像进行掩模处理, 消除建筑物的干扰; 随后, 利用波段优选算法筛选对三种典型地物敏感的波段, 经综合分析选取最佳波段构建NSVI; 最后, 结合遥感影像进行精度评价、 对比分析和光谱增强效果评价, 全面评估NSVI的价值。
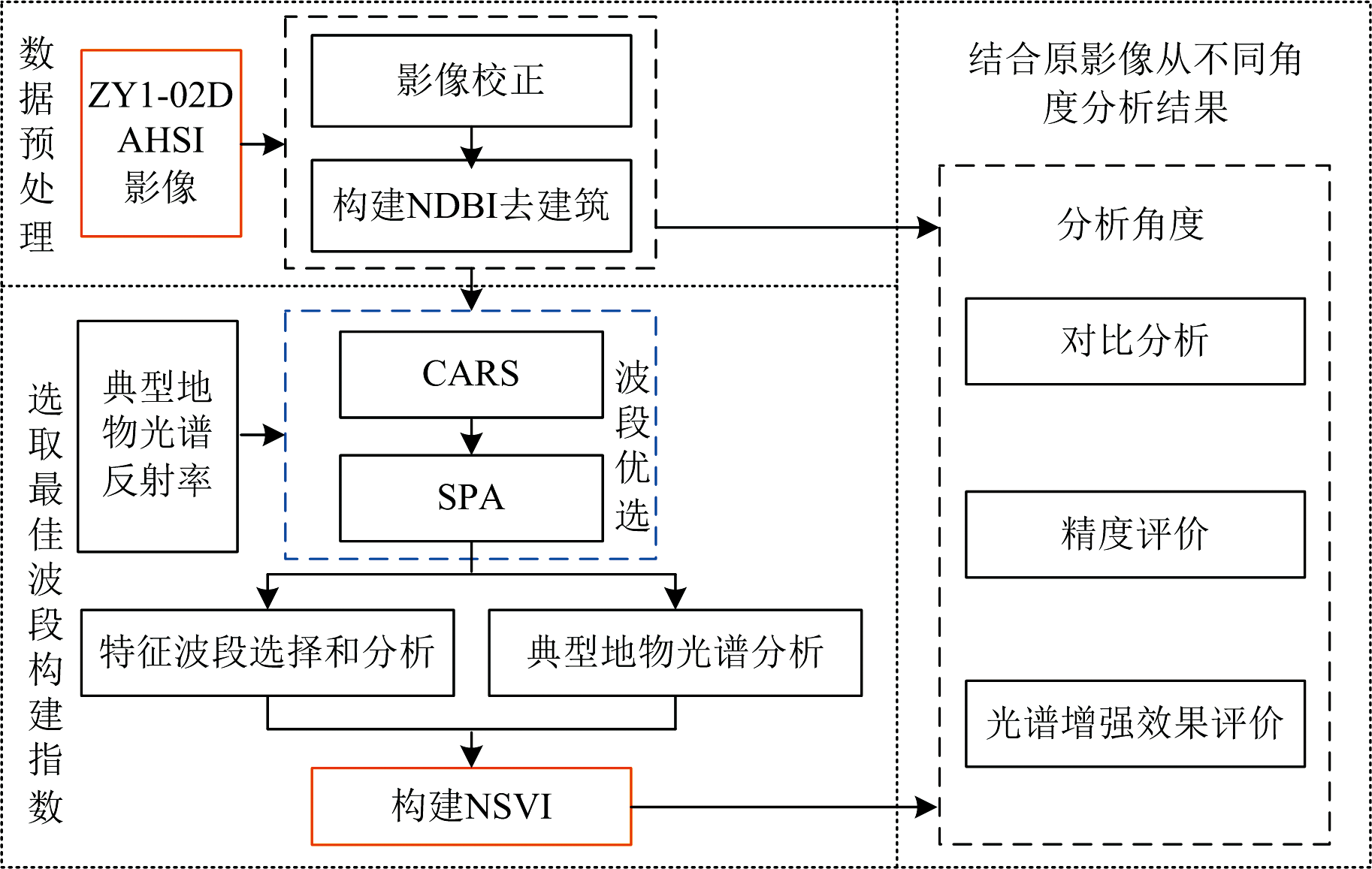 | 图2 技术路线Fig.2 Technical scheme |
1.2.2 波段选择方法
高光谱影像的光谱间隔较小, 波段量大、 冗余度高, 为减少光谱间的相关性, 通过波段优选算法降低光谱数据的维度。 竞争自适应重加权采样(competitive adaptive reweighted sampling, CARS)由Li于2009年提出, 是一种从大量光谱数据中选择关键波长最优组合的方法, 利用偏最小二乘(partial least squares, PLS)模型, 结合简单有效的“ 适者生存” 原理, 保留回归系数绝对值权重较大的波长。 该算法的步骤为: (1)通过蒙特卡洛采样随机抽取80%的样本点作为建模集和20%的样本点作为预测集; (2)利用指数衰减函数去除回归系数绝对值权重wi相对较小的变量; (3)通过自适应重加权采样重新组合新的变量集; (4)建立PLS模型, 计算交叉验证均方根误差(root-mean-squares error of cross-vali, RMSECV), 选择RMSECV最小值所对应的变量子集。 主要如式(1)
式(1)中: wi为第i个变量的回归系数绝对值权重; |bi|为第i个变量的回归系数绝对值; p为采样的变量数。
$\mathrm{RMSECV}=\sqrt{\frac{\sum_{i=1}^{n}\left(c_{i}-\hat{c}_{i}\right)^{2}}{n}}$(2)
式(2)中: ci为实际值;
连续投影算法(SPA)由Bregman于1965年提出, 是一种通过前向循环最小化矢量空间共线性的特征变量选择方法, 利用向量的投影分析, 选取冗余度最低和共线性最小的特征波段, 减少了建模所需变量个数, 提高建模效率。 该算法步骤如下:
(1)第一次迭代即n=1时, 任选一列光谱向量, 记为起始向量, 为所选变量的位置;
(2)在K个变量中, 集合S定义为
分别计算剩余列向量在当前所选向量的投影
(3)提取最大投影值的序号
将最大投影作为下一次投影的起始向量;
(4)将提取的所有波长集合进行建模预测分析, 均方根误差(root-mean-squares error, RMSE)最小的集合即为最优选择。
通过单一算法选取的波段变量之间仍然存在共线性。 为了更加有效地筛选出尽可能少的特征变量, 将两种方法结合使用, 通过CARS算法剔除信息量少的波段, 初步选取对地物敏感的波段, 再将敏感波段输入SPA进一步降维, 得到主要波段。
1.2.3 NSVI构建
阴影是导致遥感图像中“ 同物异谱” 和“ 异物同谱” 现象的重要原因, 通过建立归一化阴影植被指数NSVI能够有效检测阴影区植被。 明亮区植被、 阴影区植被和水体在近红外波段的反射率存在明显差异, NDVI对植被变化反应灵敏, 因此将NDVI与近红外波段相乘即可增强地物间的光谱差异, 提出SVI, 其表达式为
式(6)中: NIR为近红外波段反射率; R为红光波段反射率。 为保持与NDVI尺度一致, 对SVI进行归一化处理形成NSVI, 其表达式为
式(7)中: SVImax为SVI的最大值; SVImin为SVI的最小值。
以ZY1-02D AHSI高光谱影像为试验数据, 分析明亮区植被、 阴影区植被和水体等三种典型地物的光谱特征, 尝试构建该高光谱影像的NSVI并检验其应用效果。
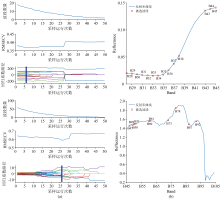
NSVI指数构建需要红光和近红外波段, 为避免其他波段的影响, 利用CARS算法与SPA相结合的方法分别对红光波段和近红外波段进行特征波段选择。 随着CARS算法迭代次数的增加, 与地物无关的波段被剔除, RMSECV呈现下降趋势, 在算法迭代至某一次时, 因重要波段被剔除, 信息丢失导致RMSECV迅速增长, 故最终选取RMSECV最低时的波段组合作为敏感波段。 在红光波段, CARS算法迭代至第6次时RMSECV最低为0.368 9, 筛选出14个波段, 波段数量占红光波段的77.78%; 在近红外波段, CARS算法迭代至第26次时RMSECV最低为0.589 1, 筛选出10个波段, 波段数量占近红外波段的16.95%[图3(a, b)]。 将被筛选出的敏感波段通过SPA进行二次降维, 得出主要波段。 随着波段数的增加, RMSE在急剧下降后趋于稳定, 在红光波段, 最佳波段数为3, 波段数量占红光波段的16.67%; 在近红外波段, 最佳波段数为4, 波段数量占近红外波段的6.78%[图4(a, b)]。 可以看出, 经过两种算法的叠加使用, 能够更加有效地选取特征波段。 由于SPA易选取边缘处的波段, 为减少误差舍弃第28、 49和92波段, 最终选取第32、 36、 73和78波段作为特征波段(表1), 对边缘波段的实验在讨论部分进行。
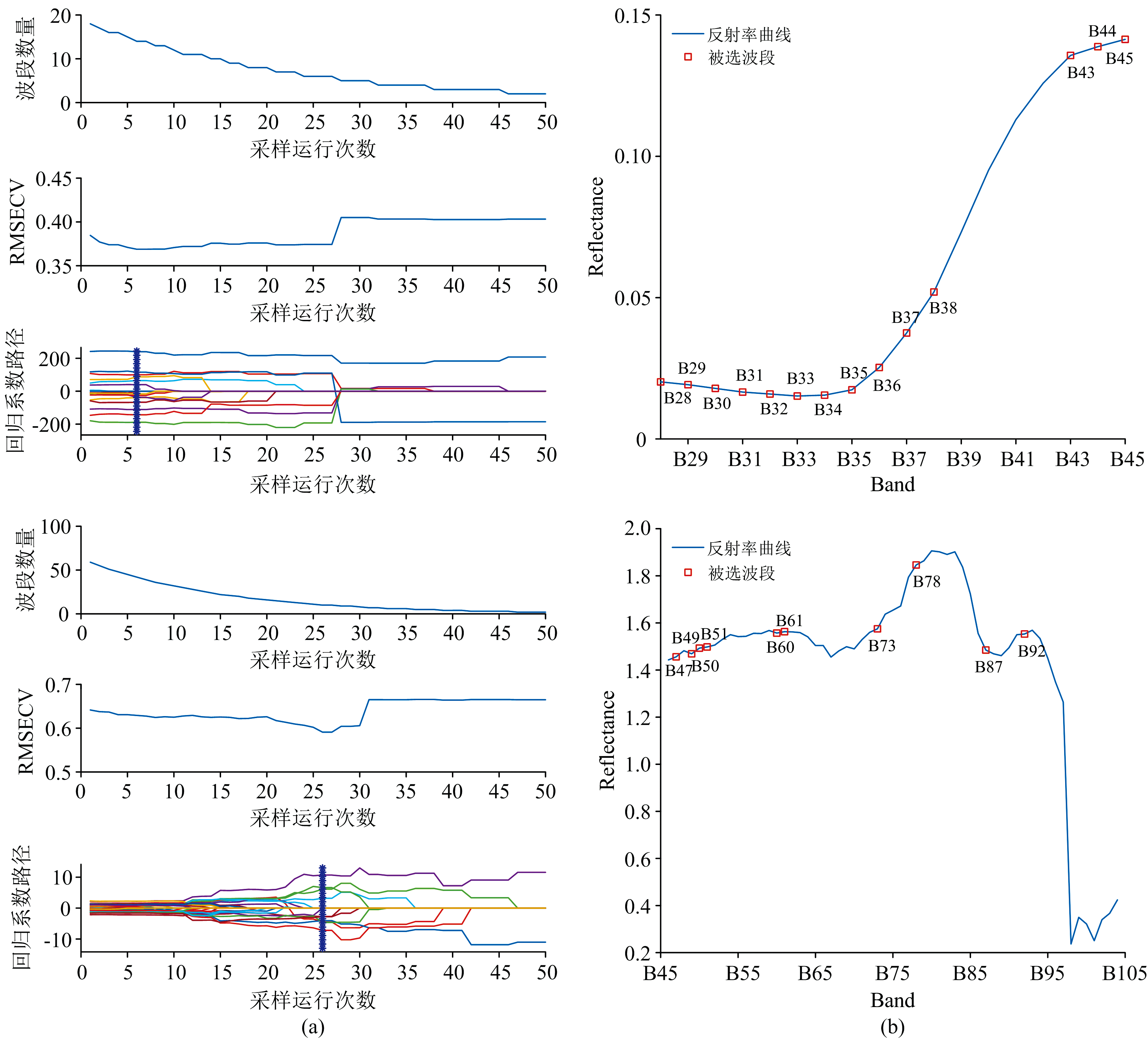 | 图3 基于CARS算法的波段筛选过程和结果 (a): 波段筛选过程; (b): 波段筛选结果Fig.3 Band screening process and result based on CARS algorithm (a): Band screening process; (b): Band screening result |
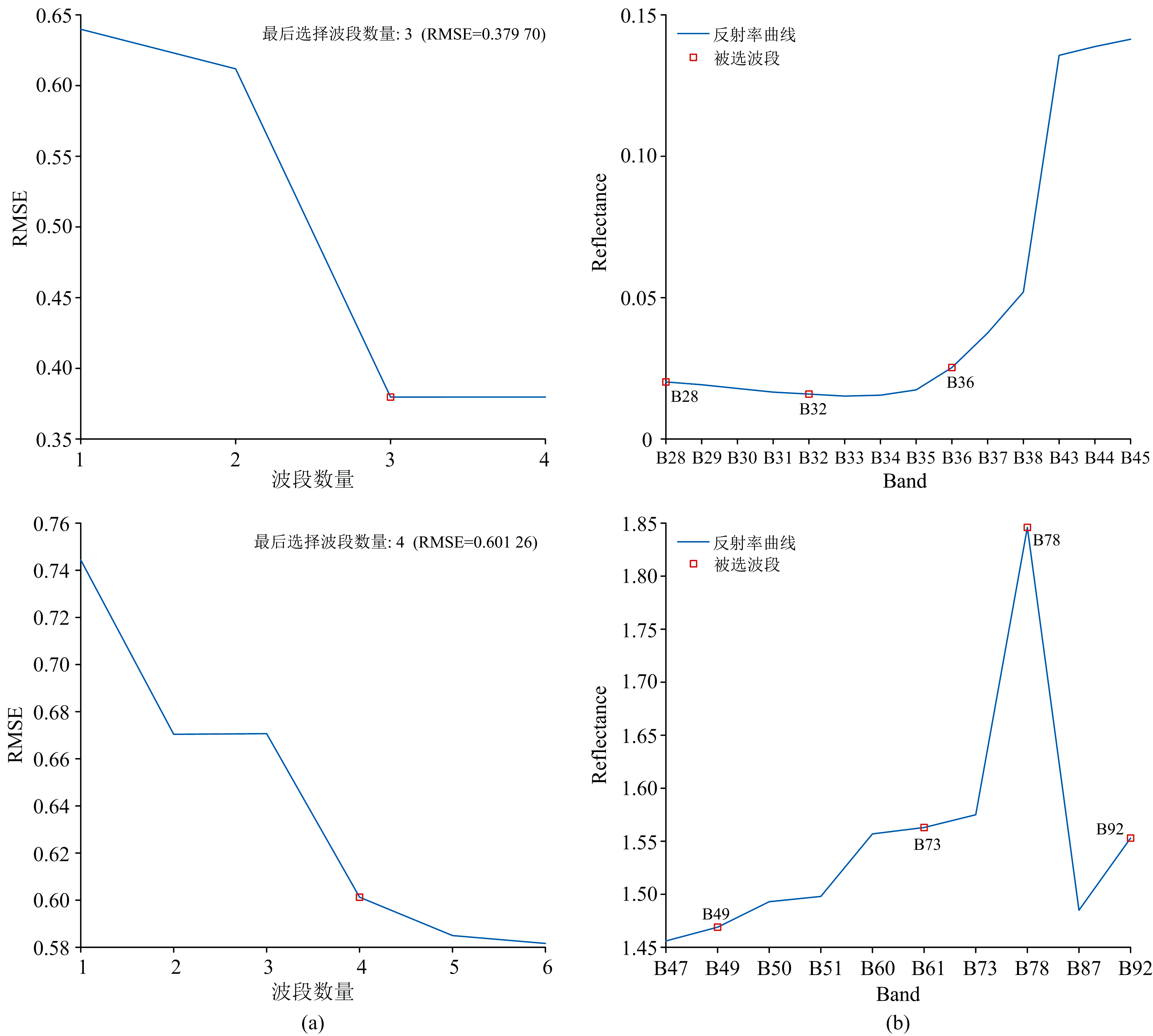 | 图4 基于SPA的波段筛选过程和结果 (a): 波段数量与RMSE变化; (b): 波段筛选结果Fig.4 Band screening process and result based on SPA (a): Changes in number of bands and RMSE; (b): Band screening result |
| 表1 波段筛选综合结果 Table 1 Band screening composite results |
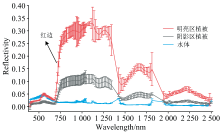
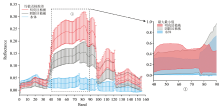
为分析所采用的高光谱影像地物光谱反射率, 统计300个样本点(明亮区植被、 阴影区植被和水体各100样本点)各波段反射率的平均值。 明亮区植被的光谱曲线与绿色植被的理论光谱曲线相近, 反射率在可见光至近红外波段急剧上升, 形成“ 红边” 区域, 上述选取的特征波段即位于“ 红边” 前后的波谷和波峰; 阴影区植被的光谱曲线整体趋势同明亮区植被, 但其反射率均值普遍低于明亮区植被, 且各波峰和波谷间的差距相对明亮区植被较小; 水体的反射率主要受水质情况的影响, 但其总体是呈先上升后下降的趋势, 在绿光波段有一个小高峰而后逐渐下降趋于平缓, 红光波段之前的反射率值高于植被区域(图5)。 通过构建NDVI并计算三种地物样本点的平均值, 除了B36与B73组合, 其余的组合植被均为正值, 水体均为负值, 阴影区植被NDVI值则接近于明亮区植被(表2)。 对比植被和水体的光谱曲线特征, ZY1-02D AHSI影像与其他影像相似, 因此构建该高光谱影像的NSVI具有可行性。
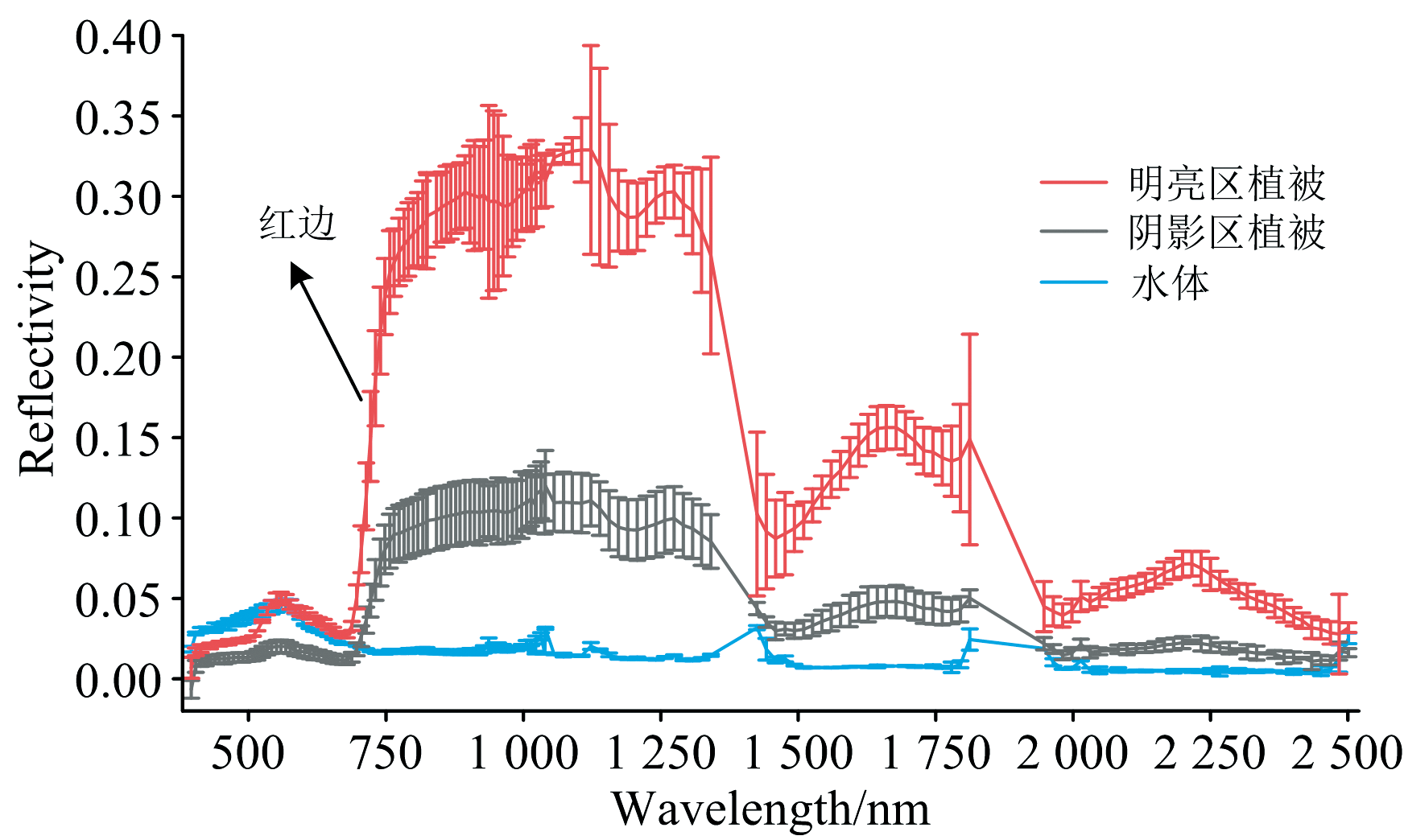 | 图5 明亮区植被、 阴影区植被和水体反射率曲线Fig.5 Reflectivity curves of bright vegetationarea, shaded vegetationarea and water body |
| 表2 三种地物的不同波段组合NDVI平均值与标准差 Table 2 Mean value and standard deviation of NDVI with different bands combinations for three features |
2.3.1 NSVI与NDVI对比分析
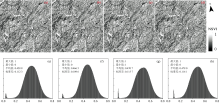
试验影像位于山区, 但影像上存有少量建筑。 由于建筑反射率的特殊性, 且本文未将建筑作为研究对象, 故通过NDBI将其掩模处理。 在NDVI基础上进一步构建NSVI, 并分别绘制主要区间的直方图[图6(a— h)和图7(a— h)]。 由图可知, NDVI分布左偏(平均值在众数的左侧), 在植被覆盖度高的区域出现“ 易饱和” 现象, 而NSVI更符合正态分布规律。 NSVI左边有一处水体像元堆积产生的小波峰, 而右边的大波峰是植被像元堆积而成, 由此可以初步判断构建该高光谱影像的NSVI能够有效区分水体和植被。
 | 图6 各波段组合NDVI及其直方图 (a): B32— B73 NDVI; (b): B36— B73 NDVI; (c): B32— B78 NDVI; (d): B36— B78 NDVI; (e): B32— B73直方图; (f): B36— B73直方图; (g): B32— B78直方图; (h): B36— B78直方图Fig.6 NDVI and its histogram for each band combination (a): B32— B73 NDVI; (b): B36— B73 NDVI; (c): B32— B78 NDVI; (d): B36— B78 NDVI; (e): B32— B73 histogram; (f): B36— B73 histogram; (g): B32— B78 histogram; (h): B36— B78 histogram |
 | 图7 各波段组合NSVI及其直方图 (a): B32— B73 NSVI; (b): B36— B73 NSVI; (c): B32— B78 NSVI; (d): B36— B78 NSVI; (e): B32— B73直方图; (f): B36— B73直方图; (g): B32— B78直方图; (h): B36— B78直方图Fig.7 NSVI and its histogram for each band combination (a): B32— B73 NSVI; (b): B36— B73 NSVI; (c): B32— B78 NSVI; (d): B36— B78 NSVI; (e): B32— B73 histogram; (f): B36— B73 histogram; (g): B32— B78 histogram; (h): B36— B78 histogram |
2.3.2 分类精度评价
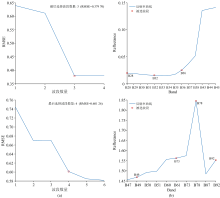
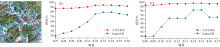
阈值法是图像分类比较常用的一种方法[3], 但其结果受操作者选值的主观性影响较大, 易出现误差。 为了更加科学合理地分类, 基于步长法以0.01的步长计算不同阈值下的分类精度, 筛选出最佳阈值, 在实际应用中可根据需求对阈值进行调整。 分别选择水体与植被的阈值、 明亮区植被与阴影区植被的阈值, 随机生成300个点对不同阈值下的分类结果予以精度评估。 从图8能够看出分类总精度和Kappa系数都呈先增长后下降的趋势, 由此可以确定最佳阈值。
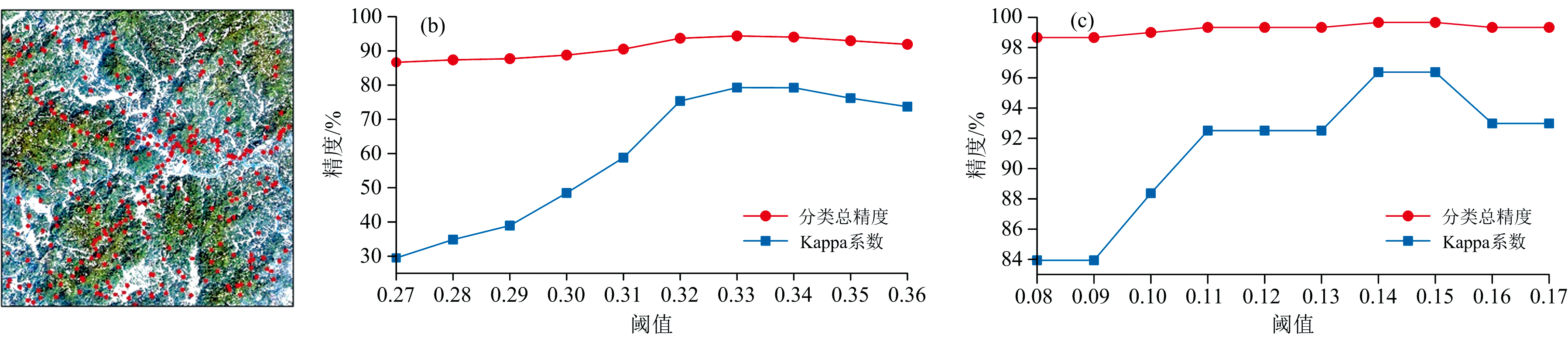 | 图8 不同阈值分类精度对比 (a): 验证点分布; (b): 明亮区植被与阴影区植被总体分类精度; (c): 水体与阴影区植被总体分类精度Fig.8 Comparison of classification accuracy of different thresholds (a): Distribution of validation points; (b): Overall accuracy of bright vegetation area and shaded vegetation area (c): Overall accuracy of water body and shaded vegetation area |
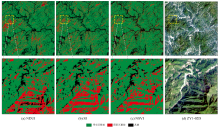
由所确定的明亮区植被、 阴影区植被及水体分类最佳阈值(表3), 对四种波段组合的NSVI进行分类, 提取明亮区植被、 阴影区植被及水体[图9(a— d)]。 表4显示, B32与B73组合比其他三种波段组合构建的NSVI更能体现真实地物情况, 其地物分类总精度和Kappa系数均是最高的, 分类总精度为94.33%, Kappa系数为0.832 8, 表明基于该波段组合构建的NSVI影像分类效果最佳。 水体和植被的区分度最高, 明亮区植被的分类效果比阴影区植被的分类效果好。 水体的高区分度证实了上述对NSVI小波峰的描述, 近红外波段与NDVI相乘不仅能增强正态性, 还能扩大水体和植被的差异。 由此可见, NSVI适用于区分各种在近红外波段有差异的地物, 其广泛的应用潜力值得进一步研究。
| 表3 明亮区植被、 阴影区植被及水体最佳分类阈值 Table 3 Best classification threshold of bright vegetation area, shaded vegetation area and water body |
 | 图9 不同波段组合NSVI分类结果(a, b, c, d)Fig.9 Classification results of NSVI in different band combinations (a, b, c, d) |
| 表4 不同波段组合NSVI地物分类精度 Table 4 Feature classification accuracy of NSVI in different band combinations |
2.3.3 光谱差异增强效果评价
为分析三种地物的光谱差异, 根据上述B32与B73组合的分类结果, 利用掩模技术获取三种地物各自的原始影像, 统计其反射率情况(图10)。 通过分类精度可知, 地物被错分的情况为少数, 对整体影响较小, 图10为地物反射率接近真实情况。 明亮区植被、 阴影区植被和水体的反射率均值在大部分区域有明显差异, 因此这三种地物具有可分性, 阴影区植被也能被有效识别。 若考虑标准差以及最大最小值, 则会发现三种地物间存在的光谱重叠现象, “ 同物异谱” 和“ 异物同谱” 现象普遍存在。 然而, 通过NSVI对典型地物进行分类的精度达到了94.33%, 由此可知NSVI能够增强典型地物间的光谱差异, 有效解译ZY1-02D AHSI影像中原始光谱混淆的像元, 提高光谱混淆像元的可分性, 进一步证明了基于该高光谱影像所构建的NSVI具备良好的阴影检测能力。
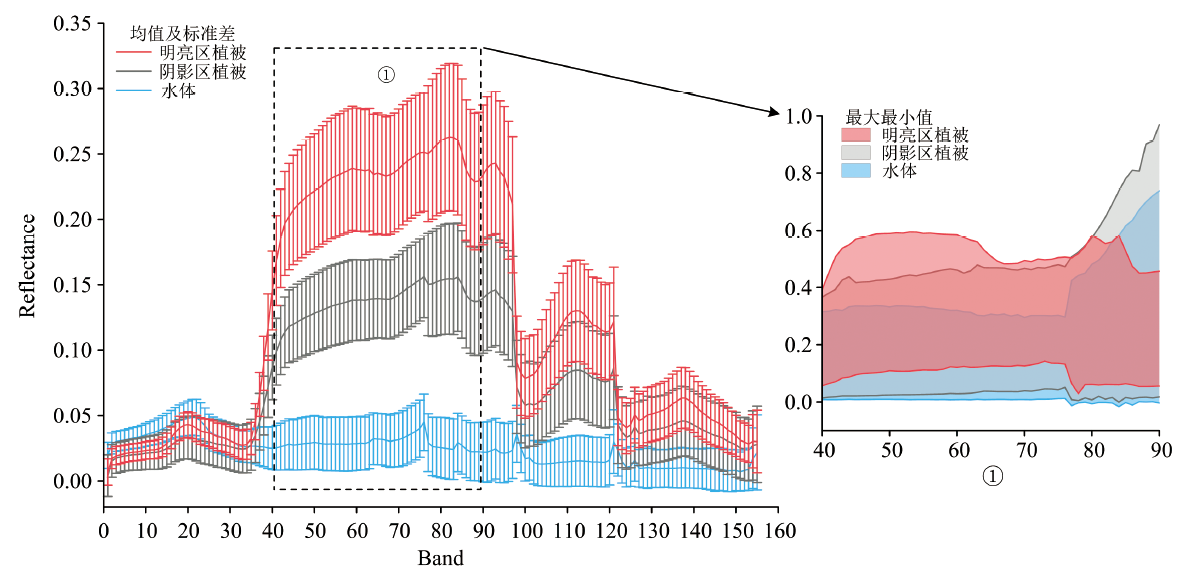 | 图10 三种地物波段反射率均值、 标准差和最大最小值Fig.10 Mean value, standard deviation, maximum and minimum value of band reflectivity in three features |
2.4.1 阴影指数对比分析
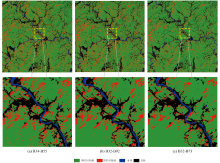
为验证归一化阴影植被指数NSVI的阴影检测效果, 选取归一化阴影指数(normalized different umbra index, NDUI)和阴影指数(shadow index, SI)对上述研究区进行阴影检测(见表5)。 NDUI和SI具有阴影区亮度值低、 饱和度高和色调值大等特性, 能够增强阴影信息, 从而实现阴影区的有效提取。 由于遥感影像中水体的饱和度和强度与阴影区相近, 为更好地对比三种指数在阴影区植被上的检测能力, 利用归一化差异水体指数(modified NDWI, MNDWI)将水体掩模处理(波段由本文波段优选算法选取)。 通过步长法选择最佳阈值区分明亮区植被和阴影区植被[图11(a— d)], 使用之前的验证点对其进行精度评估(表6)。 影像中阴影区植被检测能力由高到低分别为: NSVI> SI> NDUI。 NSVI具有较好的阴影区植被检测能力, 其原因可能在于明亮区植被与阴影区植被在近红外波段的差异较大, 而NSVI扩大了这种差异。
| 表5 明亮区植被和阴影区植被最佳分类阈值 Table 5 Best classification threshold of bright vegetation area and shaded vegetation area |
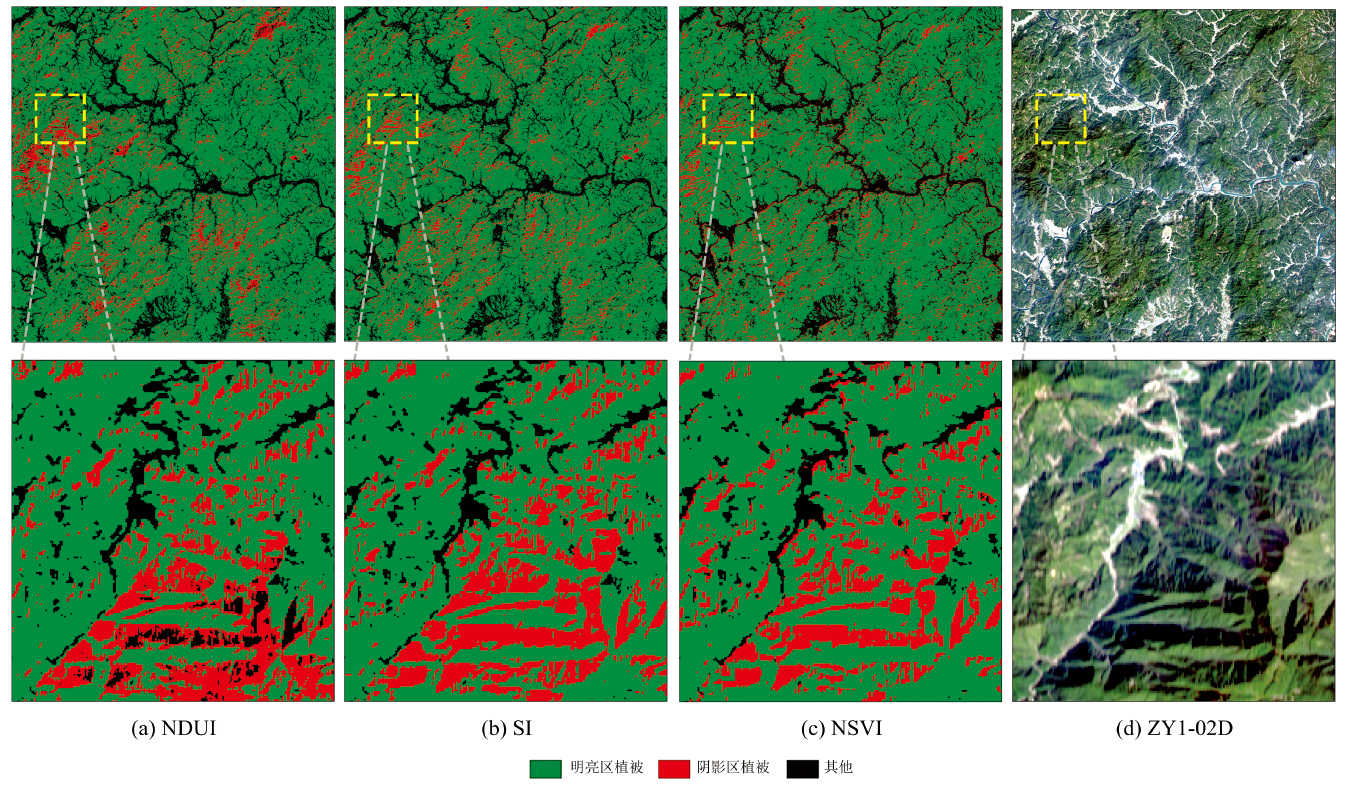 | 图11 阴影区植被检测结果Fig.11 Shaded vegetation area detection results |
| 表6 三种指数地物分类精度 Table 6 Feature classification accuracy of three indices |
2.4.2 特征波段验证分析
(1)为验证波段选择方法的有效性, 将B34与B55组合、 B32与B92组合分别构建NSVI, 前者为随机选取的波段, 后者为SPA选取的边缘波段。 通过步长法选取阈值后对地物进行分类[图12(a, b, c)], 根据之前的验证点评价分类结果的精度(表8)。 B32与B73组合的NSVI分类精度(94.33%)最高, 可见本文采取的波段选择方法能够筛选出在这三种地物中差异较大的波段, 扩大NSVI在三种地物中的不同, 提升影像分类效果。 B34与B55和B32与B92组合的NSVI分类精度虽低于B32与B73组合, 但均大于90%, 进一步证明NSVI的阴影检测能力。
| 表7 明亮区植被、 阴影区植被及水体最佳分类阈值 Table 7 Best classification threshold of bright vegetation area, shaded vegetation area and water body |
| 表8 B34— B55和B32— B92 NSVI地物分类精度 Table 8 Feature classification accuracy of NSVI with B34— B55 and B32— B92 |
 | 图12 B34— B55 (a)、 B32— B92 (b)和B32— B73 (c) NSVI地物分类结果Fig.12 Feature classification results of NSVI with B34— B55 (a), B32— B92 (b) and B32— B73 (c) |
(2)所选取的最佳波段B32和B73波长分别为662和1 014 nm。 目前学者们构建指数时常用的红光波段波长在680 nm附近, 近红外波段波长在800 nm附近[16, 17, 18]。 本研究选取的主要波段也包含这两个波长, 但近红外波段的最佳波段对应波长与常用波长稍有差异。 为对比这两个波长在区分明亮区植被、 阴影区植被和水体的效果, 选取主要波段中的B49(808 nm)和B32构建NSVI, 同时B49也是上述提到的边缘波段。 通过步长法选取B32与B49组合NSVI的最佳分类阈值(明亮区植被: NSVI> 0.23, 阴影区植被: 0.08< NSVI≤ 0.23, 水体: NSVI≤ 0.08), 利用掩模提取三种地物。 统计地物NSVI均值发现(表9), B32与B73组合的NSVI在明亮区植被和阴影区植被的差值(0.1971)及阴影区植被和水体的差值(0.228 1)均比B32与B49组合的大, 可见B32与B73组合的NSVI分类效果比B32与B49组合的更好。
| 表9 三种地物的B32— B73和B32— B49 NSVI平均值 Table 9 Average value of NDVI with B32— B73 and B32— B49 for three features |
2.4.3 不同影像试验分析
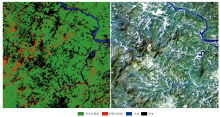
为证明本方法在不同区域、 光照和亮度条件下均可提供有效的阴影检测性能, 选取2021年3月25日涉及福建省南平市与三明市的ZY1-02D影像, 裁剪部分作为试验影像。 通过上述筛选出的最佳波段组合构建NSVI, 以同样的判断标准进行分类精度评价。 需要进一步说明的是, 遥感影像(见图13)的明暗本身是一个渐变连续的过程, 在影像中将植被划分为明亮区和阴影区则是一种主观的二值分割。 在此判定过程中, 要特别注意在一个完整实验中统一所有样本的明暗判定标准; 在此前提下, 不同操作者的明暗判定并不会对分类精度产生显著影响。 该影像分类阈值为明亮区植被: NSVI> 0.39, 阴影区植被: 0.15< NSVI≤ 0.39, 水体: NSVI≤ 0.15。 结果显示(见表10), 分类总精度为93.55%, Kappa系数为0.816 7, 分类效果较好。 由此进一步证实, 由ZY1-02D高光谱影像B32与B73组合构建的NSVI具有较强的阴影检测能力。
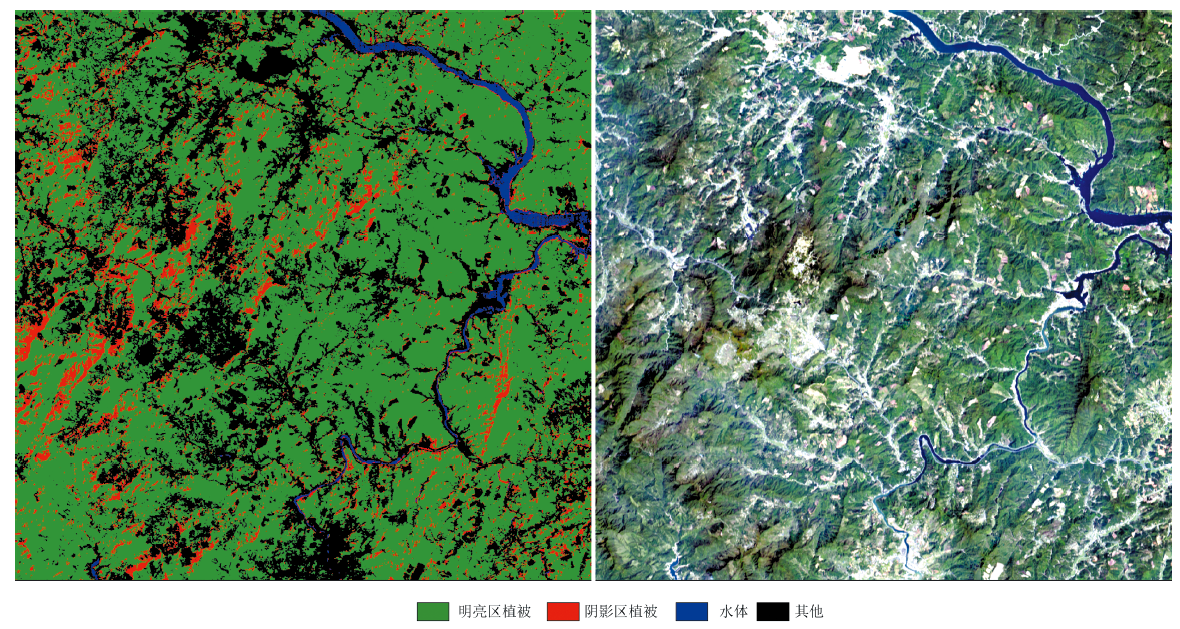 | 图13 地物分类结果Fig.13 Feature classification results |
| 表10 地物分类精度 Table 10 Feature classification accuracy |
分析了ZY1-02D AHSI影像的光谱特性, 通过CARS和SPA筛选出归一化阴影植被指数NSVI的特征波段, 构建NSVI并研究其阴影检测能力, 主要结论如下:
(1)试验影像与多光谱影像相似, 明亮区植被和阴影区植被的光谱曲线特征和绿色植被的理论光谱相似, 水体在670 nm之前的反射率高于植被总体呈下降趋势, 基于该影像构建的NSVI较NDVI正态性更显著, 且具有水体小波峰, 有利于区分水体与植被。
(2)各波段组合构建的NSVI分类总精度均超过90%, 能有效区分明亮区植被、 阴影区植被及水体。 其中, B32与B73组合构建的NSVI影像分类总精度为94.33%, Kappa系数为0.832 8, 分类效果最优。
(3)明亮区植被、 阴影区植被和水体的光谱均值存在差异, 但地物间依然含有光谱重叠现象。 NSVI增强了典型地物间的光谱差异, 能够提高ZY1-02D影像中光谱混淆像元的可分性。
(4)NSVI在ZY1-02D AHSI影像中的阴影检测能力不弱于NDUI和SI, 于另一景影像也具有较好的阴影检测能力, 分类总精度为93.55%, Kappa系数为0.816 7。
在前人的研究中NSVI适用于山地丘陵处, 能更好地克服NDVI在高植被区易饱和的问题, 因此本文仅在植被茂密的山区进行了论证, 为进一步探索NSVI的适用情景和变化规律, 在后续研究中我们将尝试在大量不同的情景构建NSVI, 如地形、 植被覆盖度等因素的差异, 阐明各情景应用情况以及阈值变化, 并深入剖析NSVI在ZY1-02D卫星影像上提取水体的效果, 提高NSVI的应用价值。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|