{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
结合注意力机制的恒星视向速度计算方法
[石泽华1  , 康志伟
, 康志伟1, * , 刘劲2 ]
, 康志伟, 刘劲|
|


作者简介: 石泽华, 1998年生,湖南大学信息科学与工程学院硕士研究生 e-mail: 1115806513@qq.com
视向速度法是一种根据目标恒星的视向速度变化来推断系外行星是否存在的有效方法, 它对系外行星探测有重要作用。 由于恒星活动、 观测光谱与模板光谱的差异以及其他因素导致的光谱噪声, 采用交叉相关算法计算恒星的视向速度会存在一定误差。 提出了一种结合注意力机制的恒星视向速度计算方法, 该方法对恒星光谱数据进行处理以去除光谱中的噪声, 根据恒星视向速度变化的周期性计算恒星的视向速度。 首先, 采用高斯过程回归算法建立光谱模型, 减少噪声的影响, 得到更加准确的光谱数据。 子集近似法被应用到光谱建模的过程中以减少计算量。 然后, 结合注意力机制的思想, 为光谱中的吸收线赋予不同的权重, 计算不同光谱间的视向速度差。 最后, 根据各视向速度差之间的关系, 计算出恒星的视向速度。 本文通过仿真实验分析了信噪比和恒星光谱数量对视向速度计算误差的影响。 实验结果表明, 相较于交叉相关算法, 当信噪比较低时, 结合注意力机制的恒星视向速度计算方法能有效减小视向速度的计算误差, 通过增加恒星光谱数量能在一定程度上提高视向速度的计算准确度。 对HD85512的光谱数据进行了分析。 与其他算法相比, 本文提出的算法减小了视向速度的计算误差, 较大地提高了计算精度。
The radial velocity method is quite effective in discovering and characterizing exoplanets based on the radial velocity change of the target stellar. It plays an important role in the detection of exoplanets. Owing to stellar activities, the differences between spectra and template, and the noise in spectra for other reasons, radial velocities calculated by the cross-correlation function algorithm may have some errors. This paper proposes a method of measuring stellar radial velocities, and an attention mechanism is integrated. Observed spectra are processed to remove noise from the spectra, and radial velocity is calculated based on the periodicity of stellar radial velocity. First, Gaussian Process Regression is used to establish spectral models, which helps reduce the influence of noise and get more precise spectra. A subset of data is used to reduce the computation cost. Then, based on the idea of attention mechanism, different weight is assigned for the absorption lines to figure out differential radial velocities between spectra. Finally, radial velocities of stellar are obtained using the relationship of differential radial velocities. This paper analyzes the effect of the signal-to-noise ratio and the number of spectra on the mean error of radial velocities. The experimental results show that compared to the cross-correlation function algorithm, the stellar radial velocity calculation method combined with the attention mechanism can effectively reduce the error of radial velocities when the signal-to-noise ratio is low. Increasing the number of spectra helps improve the accuracy of radial velocities to some degree. Finally, The spectra of HD85512 are analyzed. Compared with other algorithms, the algorithm proposed in this paper reduces the error of radial velocities and greatly improves the accuracy.
视向速度法是系外行星探测领域中的重要方法, 由于恒星与行星之间的相互作用, 恒星的视向速度(radial velocity, RV)会发生变化, 根据恒星RV的变化情况, 可以探测系外行星。 在Mayor和Queloz利用视向速度法[1]发现了第一颗环绕类似太阳的恒星运动的系外行星之后, 许多系外行星被以相同方式发现。 系外行星探测的目标包括两方面: 发现更多的低质量系外行星; 分析新发现系外行星的参数[2]。 为了实现上述目标, 需要计算准确的RV。
被广泛应用的恒星RV计算方法为交叉相关算法(cross-correlation function, CCF)[3]: 将速度作为参数, 多次移动模板光谱, 计算移动后的模板光谱与观测光谱之间的交叉相关系数, 根据多个交叉相关系数中的极值确定恒星的RV[4]。 一般情况下, 采用CCF可以得到较为准确的RV, 但对于信噪比较低的恒星光谱, 该方法的计算精度就显得不足, 主要原因为: (1) 难以得到一个完美的模板光谱[5]。 模板光谱的获取有两种方式: 一是基于元素吸收线、 恒星类型以及其他先验知识合成模板光谱; 二是将高信噪比的观测光谱作为模板光谱。 对于活跃的恒星, 通过这两种方式得到的模板光谱与真实光谱存在差异, 会导致RV较大的计算误差。 (2) 恒星活动导致的光谱变化会使得CCF计算得到的RV误差增大[6]。 在寻找低质量的系外行星时, 系外行星引起的RV变化量较小, 恒星活动产生的误差信号较大。 不同类型的恒星活动导致的误差信号持续时间不同, 误差信号甚至会表现出周期性, 这些都影响着对RV时间序列的分析。 (3) CCF算法没有利用观测光谱之间的相似性。 实际上, 在不同时间对目标恒星进行多次观测可以获得多个存在一定相似性的恒星光谱, 利用这种光谱的相似性有利于获得更加准确的RV。
考虑到CCF的上述缺点, 研究人员设计了许多方案用于从恒星光谱中提取RV。 2012年, Anglada-Escudé 等[7]设计了模板增强视向速度再分析应用程序(template-enhanced radial velocity re-analysis application, TERRA), 该方案先将高信噪比的光谱作为模板, 计算各个光谱的RV, 然后将所有光谱对齐叠加从而获得更好的模板光谱, 再次计算RV获得最终结果。 2017年, 衣振萍等[8]通过选取光谱中受噪声污染较小的部分计算恒星的RV, 提高了RV的计算准确度。 2021年, Sedaghat等[9]利用机器学习算法对大量光谱数据进行处理, 从而得到恒星的RV。 2022年, Lienhard等[10]采用最小二乘反卷积算法计算了恒星的RV。 现有的RV计算方法仍存在一些问题: 一方面, 大多数的RV计算方法依赖于模板光谱, 这会导致最终的RV存在一定误差; 另一方面, 噪声会对观测光谱产生一定影响, 一些RV计算方法并没有对光谱中的噪声进行有效处理, 这会影响最终结果的准确性。 Zhao等[11]分别利用多种不同算法针对相同的光谱数据计算了RV, 并比较了这些算法的运行时间, 以及利用这些算法所获取的RV的均方根值(root mean square, rms), 计算结果表明, 并没有哪一种算法针对所有的样本数据取得最准确的结果。
为了计算得到更加准确的RV, 本文提出了一种数据驱动的RV计算方法, 该方案仅利用观测光谱即可计算目标恒星的RV。 采用高斯过程回归(Gaussian process regression, GPR)算法实现光谱建模, 从而得到更加准确的光谱数据。 将子集近似法运用到光谱建模的过程中, 在一定程度上降低光谱建模的计算量。 在不依赖模板光谱的前提下, 将注意力机制的思想运用到恒星RV的计算过程中, 从而充分提取恒星光谱中的RV信息。 根据恒星RV变化的周期性, 计算得到恒星的RV, 提高了最终结果的准确度。
假设有S条光谱, 每一条光谱有T段, 将第i条光谱的第t段的波长、 流量值以及流量值的噪声方差表示为λ i(t)、 fi(t)和
步骤1: 采用GPR算法建立各段光谱模型;
步骤2: 根据光谱在各个波长处流量值的均值, 提取光谱中的吸收线, 根据吸收线的相对深度将每一段光谱分割为多个部分光谱;
步骤3: 基于注意力机制的思想, 计算各个部分光谱相对于原始光谱的权重;
步骤4: 结合光谱模型和权重信息, 计算各条光谱之间的Δ RV;
步骤5: 计算各条光谱的RV。
GPR是采用高斯过程先验对数据进行回归分析的一种机器学习方法, 采用GPR处理天文数据已取得诸多成果: Rajpaul等[12]运用GPR对RV时间序列进行了分析; Pass等[13]运用GPR估计系外行星的有效温度。 采用GPR对恒星光谱进行处理, 利用各个流量值之间的相关性, 计算各个流量值的均值和方差, 减小流量值的误差, 从而得到更加准确的光谱数据。
由于噪声的影响, 任意一段光谱的每个流量值被视为一个随机变量, 观测光谱表示为多个随机变量的联合分布
式(1)中, λ 表示波长, f代表光谱在λ 处的流量值, N表示高斯分布, μ (λ )代表均值函数, K(λ , λ )为协方差矩阵, 矩阵中的元素代表各个流量值之间的协方差。 给定一个波长λ * , 光谱在λ * 处的流量值为f* , 它与现有观测数据f的联合分布为
基于式(2), 以及光谱的流量值f, 可以计算f* 的均值和方差
采用GPR处理光谱数据时, 为了便于计算, 均值函数的值被设定为0, 协方差矩阵中的元素通过核函数计算得到, 常用的核函数有指数核函数、 周期核函数和Maté rn核函数等。 对于恒星光谱数据, 选择Maté rn核函数计算协方差矩阵中的元素值, 核函数如式(5)所示
式(5)中, $\tau=\sqrt{5\left(\lambda-\lambda^{\prime}\right)^{2}}$, ρ 与h为超参数。 每一条恒星光谱的RV各不相同, 每一条光谱中的各段受到的污染也各不相同, 为了更加准确地建立各段光谱的模型, 核函数中的ρ 与h并没有确定, 对每段光谱需要求解对应的值。 Williams等[14]采用似然函数最大化的方式求解核函数中的超参数, 本文使用相同的方法针对每一段光谱计算得到最佳的ρ 与h, 对数似然函数如式(6)所示
式(6)中, M为每段光谱中的样本点个数。 由于观测光谱数据存在噪声, 在计算协方差矩阵时需要考虑这一因素, 此时的协方差矩阵为
式(7)中, diag(σ 2)表示对角矩阵, 对角线元素为各个流量值的噪声方差。
随着天文观测技术的不断发展, 天文台获得了大量的恒星光谱数据, 对大量数据进行处理是GPR所面临的挑战。 针对这一问题, 需要对GPR算法进行一定的优化, 优化方案主要包括子集近似法、 稀疏内核法和低秩近似法[15]。 子集近似法的实现原理是从全体的训练数据中抽取若干样本构成数据子集, 采用数据子集代替全体数据进行训练, 从而降低算法的计算复杂度[16]。 当原始数据样本足够多时, 采用子集近似法对GPR进行优化可以在保证一定准确度的前提下降低GPR的计算复杂度。 但是采用该方案对GPR进行优化无法获得准确的方差。 稀疏内核法指的是当|λ i-λ j|超过某一阈值时, 将k(λ i, λ j)设定为0, 通过这种方式降低计算复杂度。 采用稀疏内核的方式降低GPR的计算复杂度会导致最后得到的协方差矩阵为半正定矩阵, 影响GPR算法的后续流程。 低秩近似法指的是将原始的协方差矩阵转换为低秩矩阵的乘积
从原始数据中选取m个样本点, 利用核函数计算得到Kmm, 然后利用全体数据和被抽样的数据子集计算Knm, 根据式(8)计算
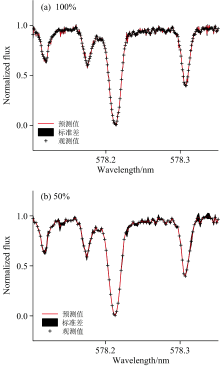
为了降低采用GPR处理光谱数据的计算复杂度, 同时确保计算得到的各个流量值的方差为正值, 本文采用子集近似法对光谱建模过程进行优化。 图1对比了采用随机抽取的50%样本数据实现光谱建模和利用全部数据实现光谱建模的效果。 从图1中可以看出: 二者的预测值相似, 使用部分样本点进行光谱建模在一定程度上增加了各个流量值的标准差, 但这种变化基本可以忽略不计, 对后续的RV计算影响较小。
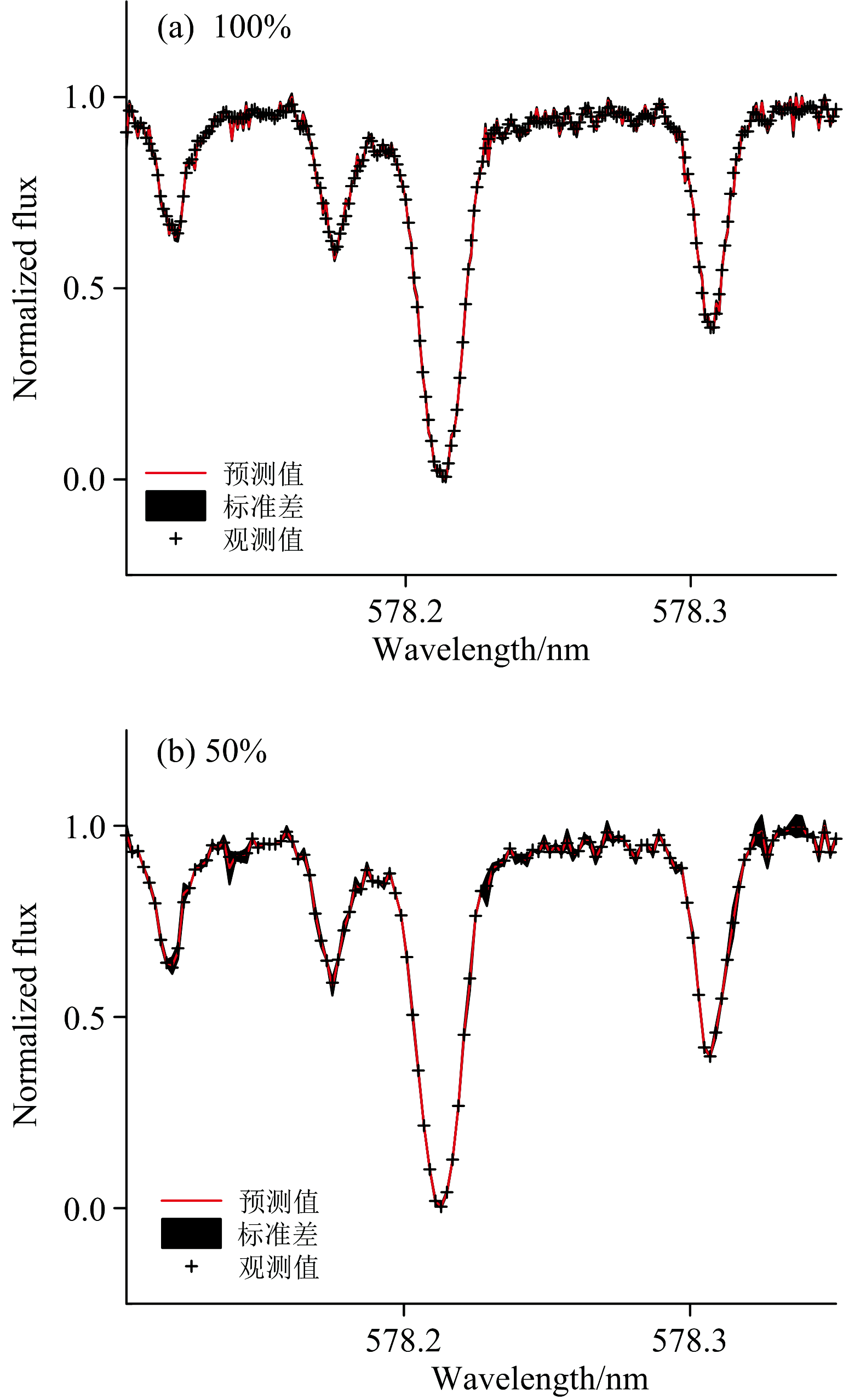 | 图1 采用部分数据实现光谱建模Fig.1 Establish model of spectrum using partial data |
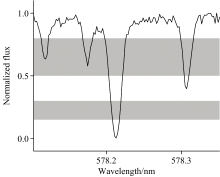
注意力机制是机器学习中一个热门概念, 它指的是针对输入数据中的不同部分, 赋予不同的权重, 从而得到更加准确的输出结果。 为了充分提取恒星光谱中所蕴含的RV信息, 注意力机制的思想被运用到本文的RV计算方法中: 一个观测光谱被看作多个部分光谱的叠加, 不同部分光谱的吸收线的相对深度处于不同的范围, 利用相似性函数计算不同部分光谱和原始观测光谱的相似性, 为不同的部分光谱分配权重。 在采用GPR算法处理光谱数据后, 根据各个流量值的均值提取恒星光谱中的吸收线。 选取相对深度大于0.2的吸收线, 将相对深度处于不同范围的吸收线分配至不同部分的光谱中。 图2展示了一个光谱分割的例子: 提取光谱中的吸收线, 将顶点处于同一区域的吸收线分割至同一个部分光谱中。
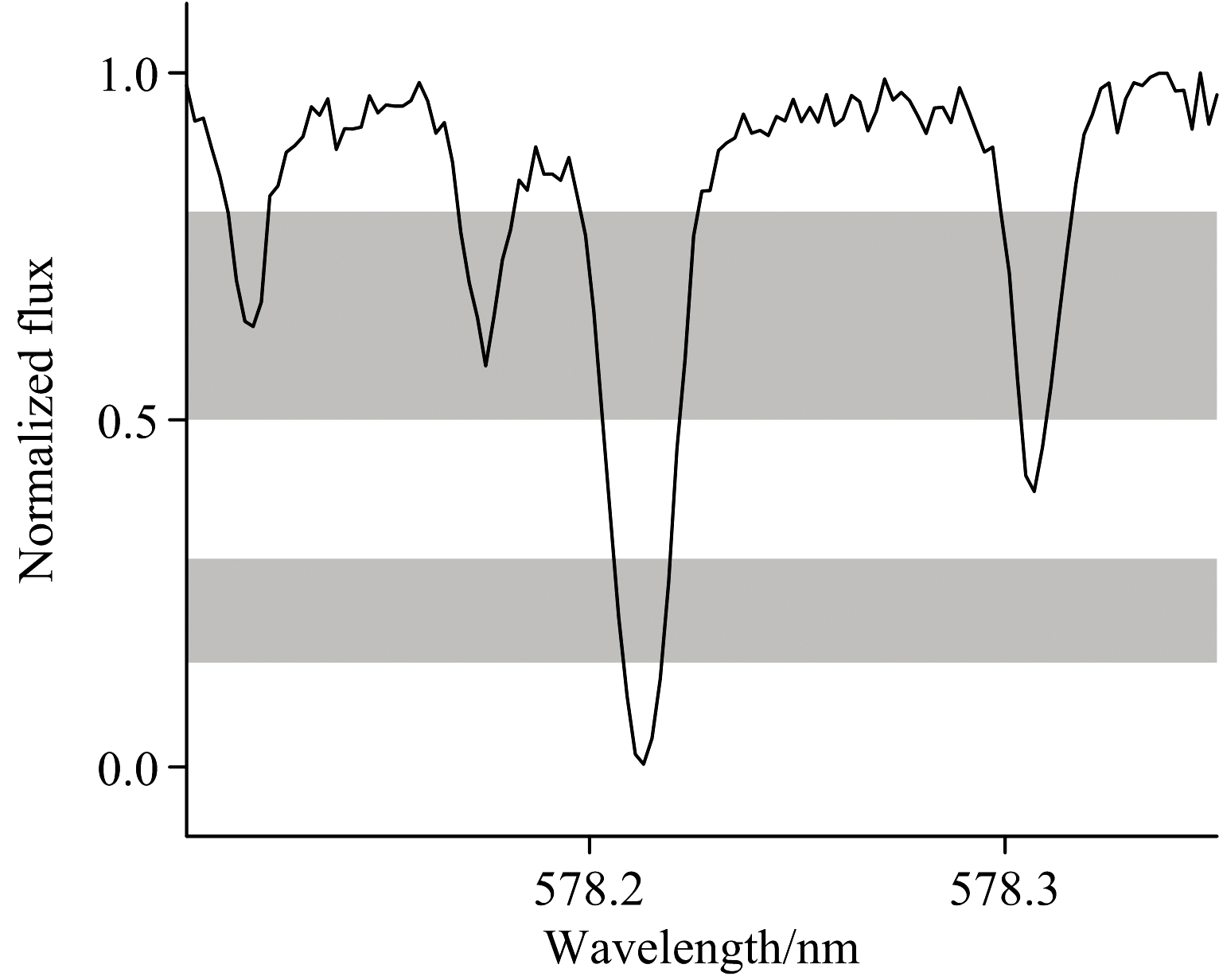 | 图2 吸收线提取示意图Fig.2 Diagram of extracting absorption lines |
下一步是计算不同部分光谱的权重。 各个部分光谱所包含的吸收线数量各不相同, 在计算权重时需要考虑吸收线的数量和吸收线的相对深度。 根据流量值的均值完成对观测光谱的分割后, 计算每一条部分光谱的权重
式(9)中, z为每条部分光谱中吸收线相对深度的最小值, n为每条部分光谱中吸收线的数量。
采用视向速度法寻找系外行星, 会依据RV的变化情况, 结合其他信息判断是否存在系外行星。 本文通过求解恒星在不同时刻的Δ RV计算恒星的RV。
在上一部分中, 提取出每一段光谱中相对深度大于0.2的吸收线, 根据相对深度的不同, 利用提取出的吸收线构造了P个部分光谱。 选取分别从第i条光谱和第j条光谱的第t段中提取出的两个部分光谱, 它们所包含的吸收线的相对深度处于同一范围内, 对第j条光谱的第t段中第p个部分光谱的波长
$\lambda_{j(t)}^{p}(v)=\lambda_{j(t)}^{p} \sqrt{\frac{1+v / c}{1-v / c}}$(10)
式(10)中, c为光速, v为速度。 采用最大似然估计算法计算两个部分光谱之间的视向速度差Δ R
式(11)中,
按照上述步骤对所有光谱数据进行处理, 从而得到从任意两条光谱的相同段中提取出的第p个部分光谱之间的视向速度差Δ R
每个部分光谱相对于各自的光谱具有不同的权重, 视向速度差涉及到不同光谱之间的计算, 接下来计算不同光谱对在相同波长段之间的视向速度差Δ RVij(t), 以及它们各自的方差σ (Δ RVij(t))2
$\sigma\left(\Delta R V_{i j(t)}\right)^{2}=\sum_{p=1}^{P}\left[\frac{w_{i(t)}^{p}+w_{j(t)}^{p}}{\sum_{q=1}^{P}\left(w_{i(t)}^{q}+w_{j(t)}^{q}\right)}\right]^{2} \sigma\left(\Delta R V_{i j(t)}^{p}\right)^{2}$(13)
每条观测光谱由多段光谱组成, 为进一步提高Δ RV的准确性, 需要对这些结果进行处理。 在利用同一对观测光谱的不同波长段数据求得多个Δ RV及其方差后, 基于方差进行加权求和
$\sigma\left(\Delta R V_{i j}\right)^{2}=\frac{1}{\sum_{t=1}^{T} \sigma\left(\Delta R V_{i j(t)}\right)^{-2}}$(15)
即可得到每对光谱间的Δ RV。 最后, 利用所求的Δ RV计算恒星在不同时刻的RV及其方差, 如式(16)和式(17)所示
$\sigma\left(R V_{i}\right)^{2}=\frac{1}{S^{2}} \sum_{j=1}^{S} \sigma\left(\Delta R V_{i j}\right)^{2}$(17)
按照上述步骤对所有恒星光谱进行处理, 即可计算恒星在不同时刻的RV。
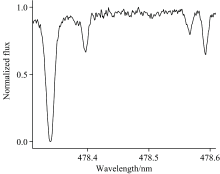
从欧洲南方天文台获取同一目标的多条光谱, 将观测光谱对齐叠加得到模板光谱, 对模板光谱的轮廓进行一定的修改得到一条模拟光谱。 假设RV的变化周期为20 d, 振幅为15 m· s-1, 对模拟光谱进行多普勒频移, 得到1 000条光谱, 根据信噪比为多普勒频移后的光谱添加噪声, 得到最终的观测数据。 图3是令RV为0 m· s-1生成的一条模拟光谱中的一部分。
 | 图3 部分模拟光谱示意图Fig.3 Part of simulated spectrum |
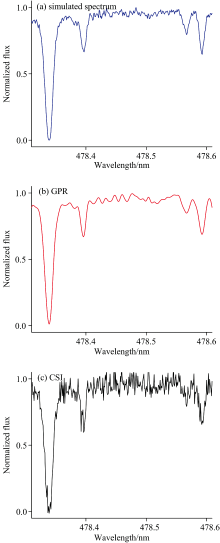
在得到观测样本后, 对比了采用GPR算法与三次样条插值(cubic spline interpolation, CSI)算法实现光谱连续化的结果, 如图4所示。
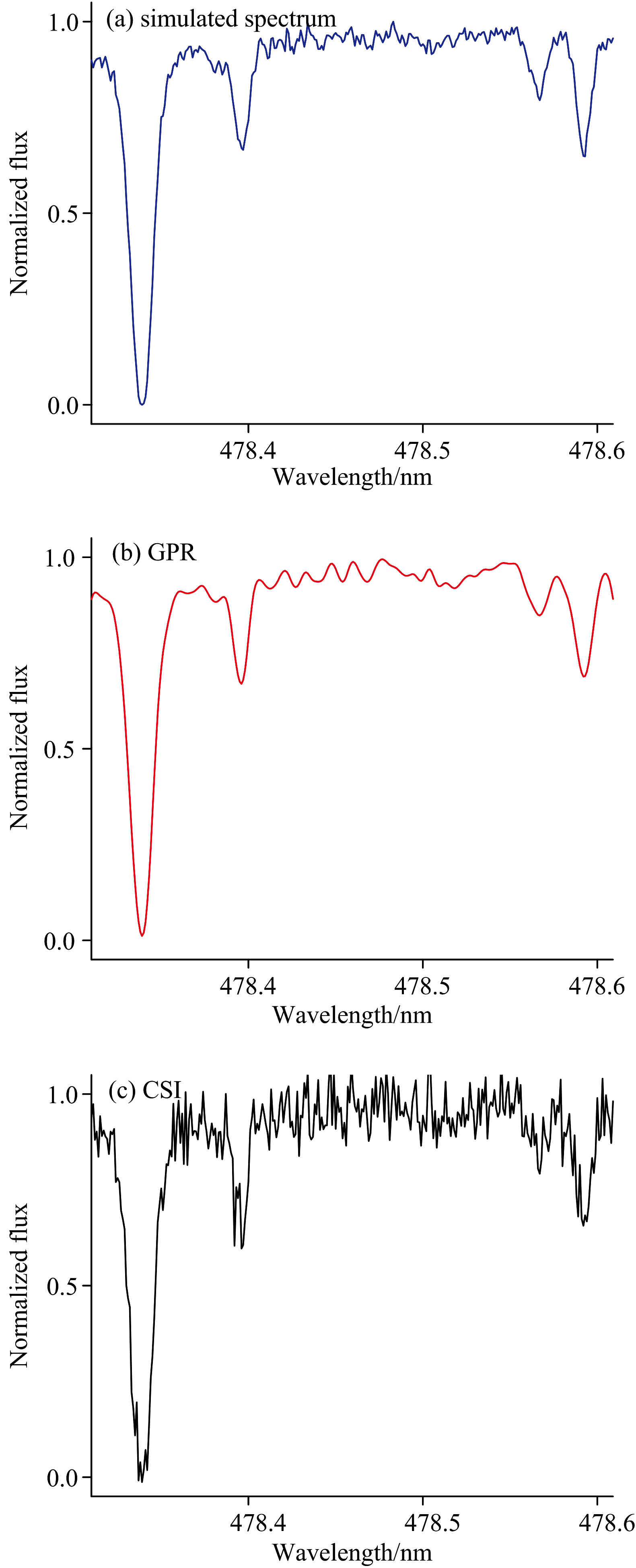 | 图4 连续化光谱示意图Fig.4 Diagram of continued spectra using different methods |
从图4中可以看出, 采用GPR算法处理后的观测光谱数据的流量值的均值函数相较于直接利用CSI算法处理的光谱数据, 前者的处理结果能够更加准确地反映光谱的变化情况, 与没有噪声的模拟光谱更加相似。
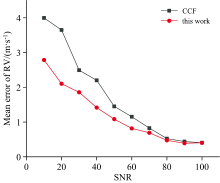
图5比较了在不同信噪比的情况下, 分别采用CCF和本文所提出的RV计算方法针对所有观测样本计算得到的RV的平均误差。 从图5中可以发现, 当模板光谱与恒星光谱不是完全匹配时, 数据驱动算法充分体现其优越性, 在信噪比较低的情况下, 采用本文算法计算的RV的平均误差明显低于采用CCF计算的RV的平均误差。 随着信噪比的增加, 两种算法的平均误差均会下降。 当信噪比大于70时, 两种算法均可达到较高准确度, 此时它们的误差基本一致。 本文所提出的RV计算方法能够充分提取相对深度较大的吸收线中的RV信息, 而且不会受到模板光谱和观测样本是否一致的约束, 当信噪比较低时可以实现较高的计算准确度。
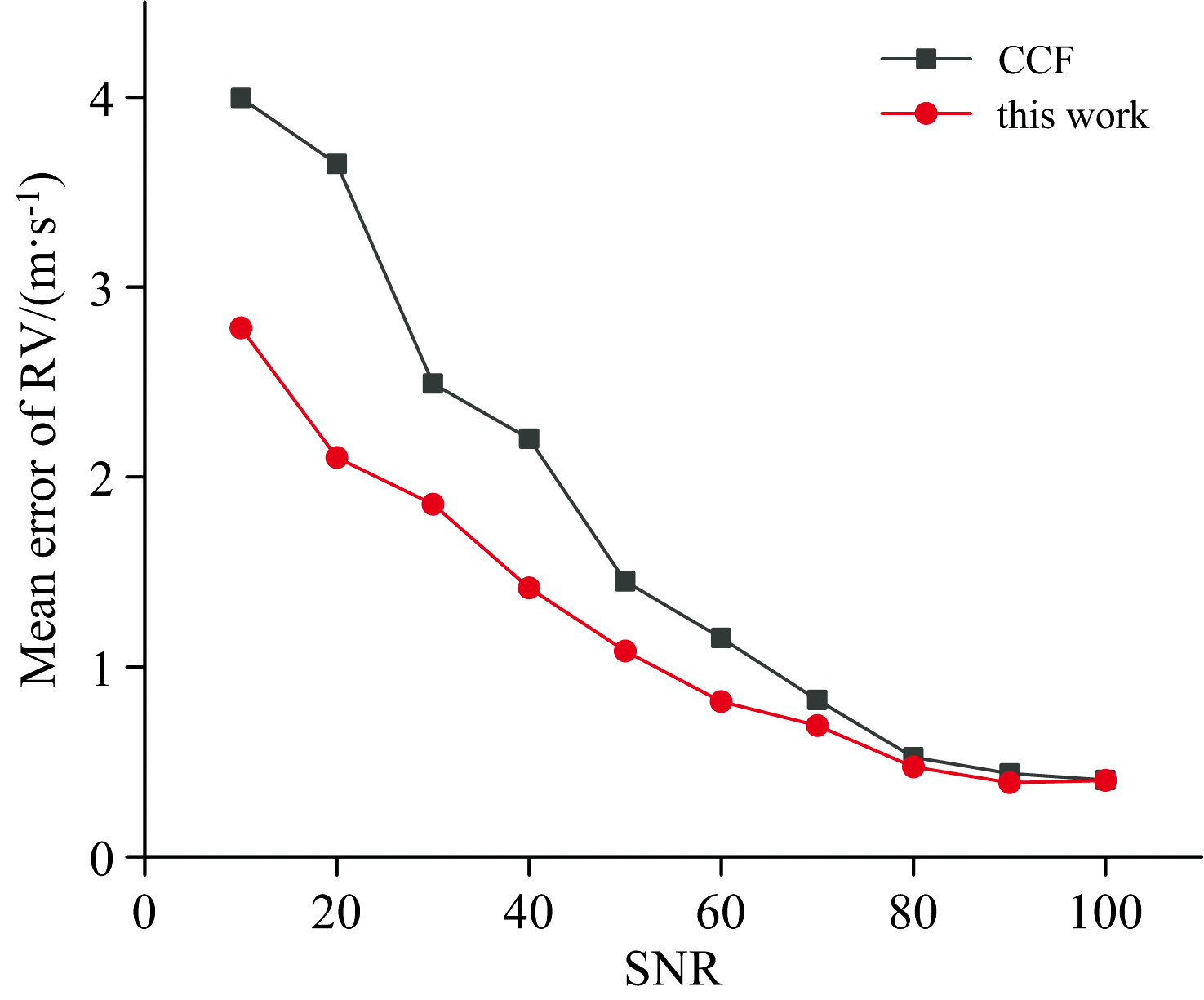 | 图5 不同信噪比下RV的平均误差Fig.5 Mean error of RV at different SNR |
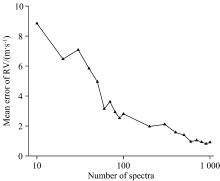
采用本文所提出的RV计算方法提取RV还需要考虑观测光谱数量与RV计算误差之间的关系。 图6给出了在信噪比为50的条件下, RV平均误差与观测光谱数量之间的关系。 可以发现, 随着光谱数量的增加, RV的平均误差逐渐减小, 当观测样本数量达到600时, 继续增加观测光谱数量无法减少平均误差, 此时的误差达到稳定状态。
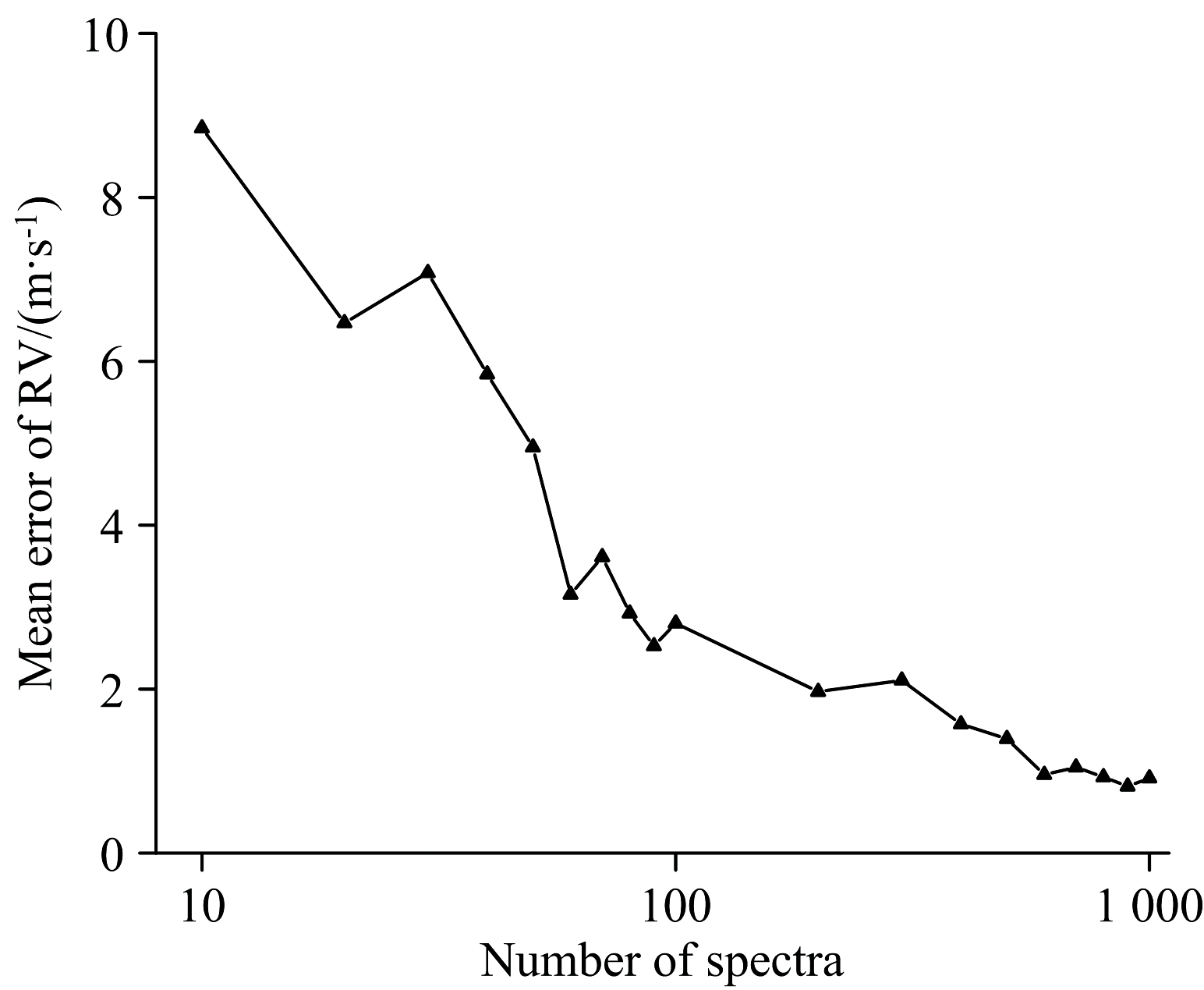 | 图6 不同光谱数量的RV误差Fig.6 Mean error of RV at different number of spectra |
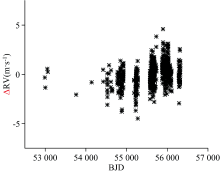
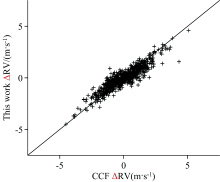
HD85512是HARPS-GTO项目的一个观测目标, 它的光谱类型是K5V, 根据目前的研究, HD85512的周围仅有一颗行星围绕, RV的振幅变化很低, 是一个十分简单的行星系统[18]。 从欧洲南方天文台获取了700条HD85512的观测光谱, 采用本文提出的算法计算RV, 结果如图7所示。 将计算结果与采用CCF计算得到的RV进行比较 (为了方便比较, 采用CCF计算得到RV后, 所有的RV减去均值, 使采用CCF计算的RV与采用本文的算法所取得的结果处于相同的范围内), 如图8所示。 图8中的纵轴代表采用本文算法计算得到的RV, 横轴表示采用CCF计算得到的RV, 这些点基本分布在y=x这条直线附近。
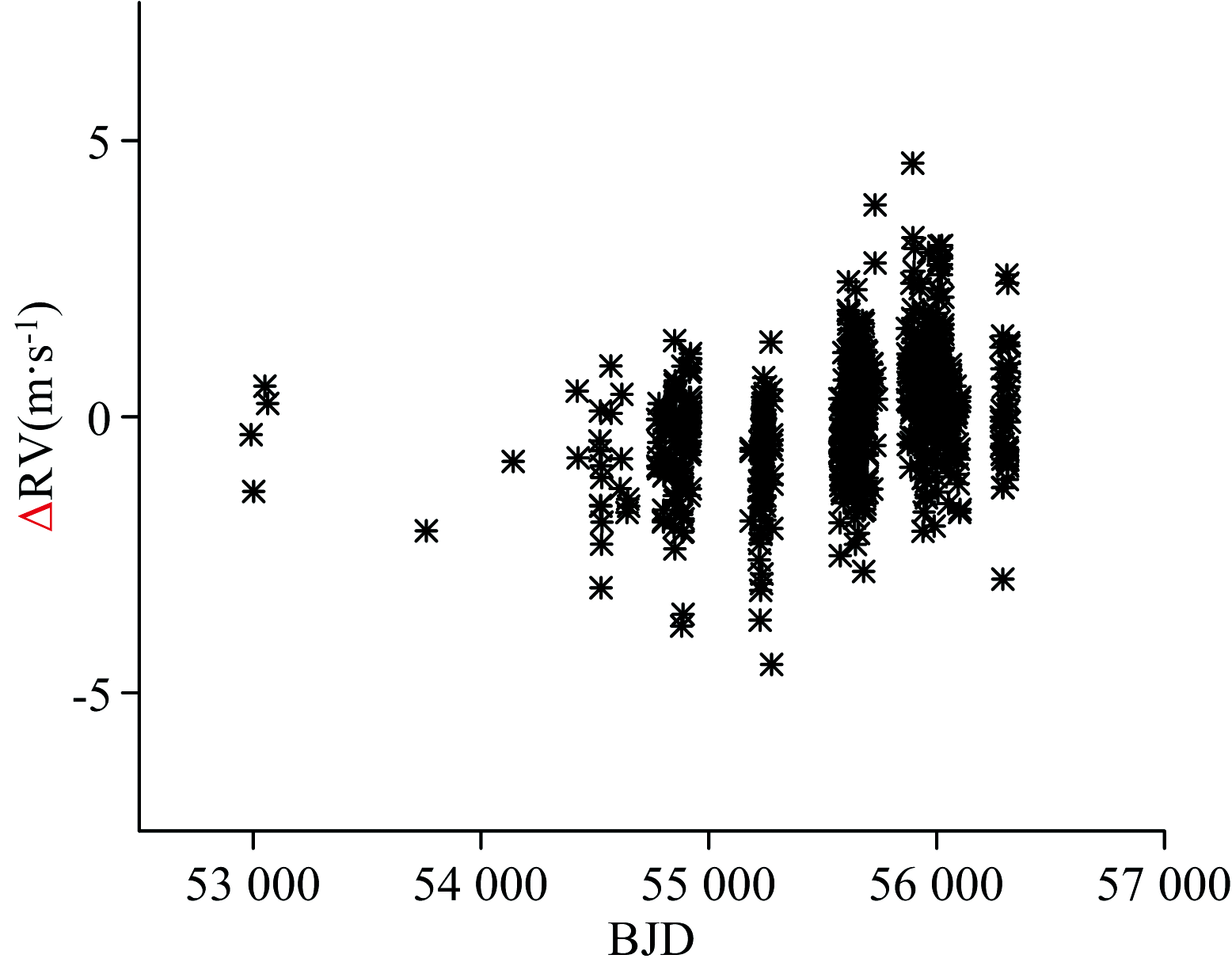 | 图7 采用本文算法计算的RVFig.7 RV of this work |
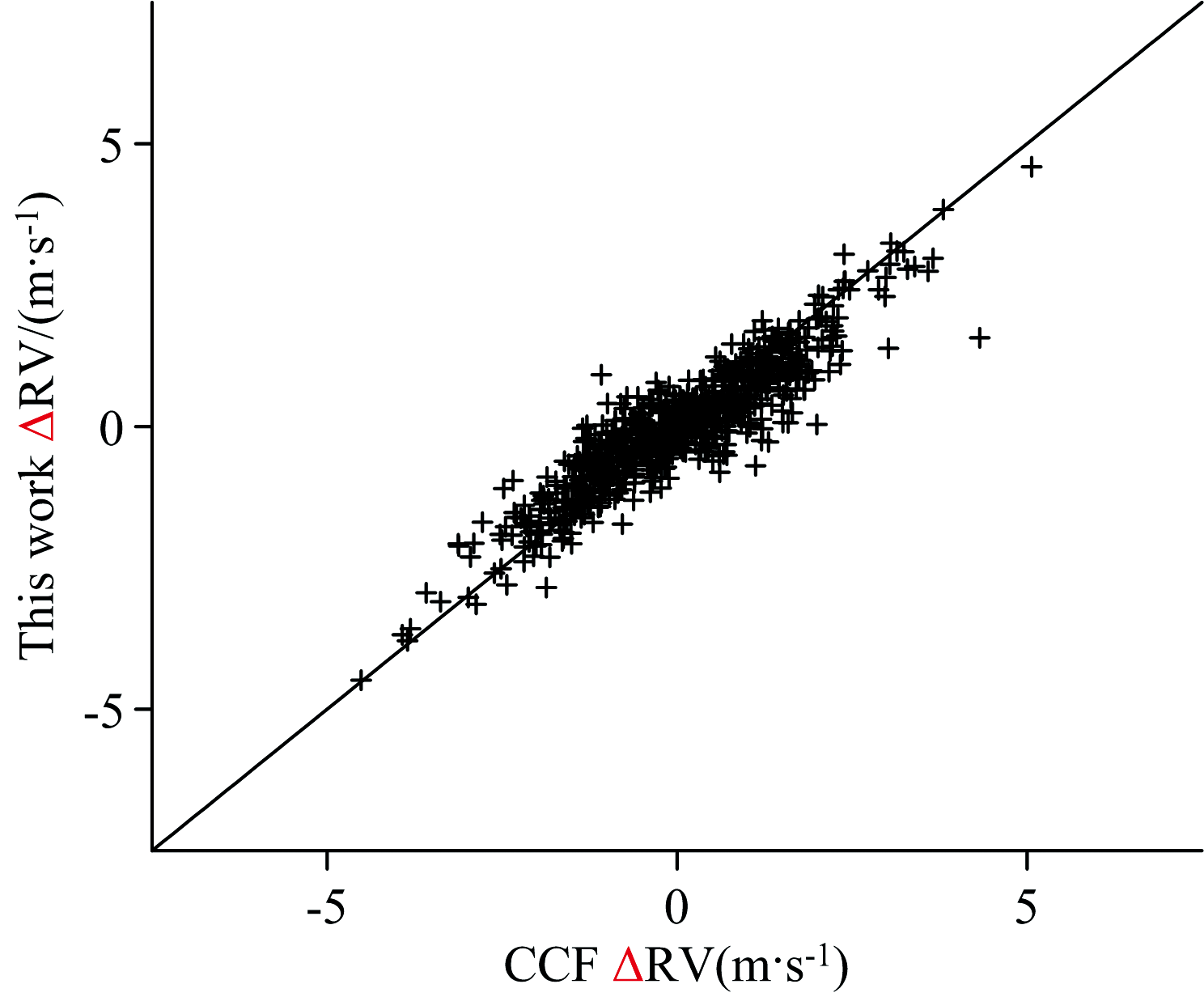 | 图8 采用CCF与本文算法计算RV的对比Fig.8 Comparison of RV between CCF and this work |
表1比较了采用不同算法计算得到的RV的rms。 从表1中可以看到, 采用CCF和TERRA计算得到的RV的rms基本一致, 而采用本文的算法计算得到的RV的rms相较于其他算法有一定的下降, 这意味着采用本文的算法从光谱中提取RV可以得到更加准确的结果。
| 表1 采用不同算法获取的RV的rms |
基于GPR和注意力机制的思想实现了一种数据驱动的RV计算方法。 采用GPR对光谱数据进行处理, 可以得到更加准确的流量值, 子集近似法的应用在一定程度上降低了光谱建模的计算复杂度, 同时不会过多地损失精度, 这有利于快速处理大量的光谱数据。 将注意力机制的思想引入到RV计算方法中从而充分提取恒星光谱数据中的RV信息, 提高了RV的计算准确度。 实验结果表明, 该算法减少了光谱建模的计算量, 减小了RV的计算误差, 提高了系外行星探测的工作效率。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|