

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于无人机多光谱植被指数的生菜全氮含量预测
[连炳瑞1, 2  , 李雅豪
, 李雅豪1, 3 , 张静2 , 李长青4 , 杨小冬5, * , 王激清2 , 邹国元1 , Thompson Rodney6 , 杨俊刚1, * ]
, 李雅豪, 王激清]
|
|


作者简介: 连炳瑞, 1998年生, 北京市农林科学院植物营养与资源环境研究所硕士研究生 e-mail: 1751284049@qq.com
我国露地蔬菜种植规模庞大, 生产方式高度集约化, 但过量施肥等导致的水氮利用效率低下的问题较为严重。 为实现露地蔬菜规模化种植中精准施肥、 高效生产的目标, 以露地生菜为研究对象, 设无氮(N0)、 低氮(N1)、 高氮(N2)三个处理, 通过无人机搭载多光谱相机, 建立3种多光谱植被指数(NDVI、 RVI和SAVI)与生菜叶绿素、 生物量、 吸氮量、 全氮含量数据集, 并构建单生育期和多生育期氮素诊断模型。 结果表明: (1)在莲座期和结球期, 生菜各处理NDVI、 RVI和SAVI值表现出随施氮量的增加而增大, 但在收获期, N1处理达到最大值。 (2)在生菜结球期, NDVI与生菜的产量、 吸氮量、 叶绿素均存在显著相关性, 其中生菜全氮含量与叶绿素在 p≤0.01水平下显著相关, 相关系数( R)为0.51; 综合生菜多生育期, NDVI值与生菜的产量、 叶绿素、 吸氮量和全氮含量均在 p≤0.001水平下达到极显著相关, 相关系数分别为0.85、 0.82、 0.81和0.71。 (3)通过相应数据集拟合出指数、 线性、 对数和幂函数4种模型关系, 建立生菜多生育期植株全氮最佳预测模型: 全氮=16.52ln(NDVI)+73.514; 应用生菜全氮估层模型反演基地生产田块, 其平均相对误差为3.22%、 RMSE=0.556 6、 NRMSE=0.010 8, 说明模型估算效果均较好, 通过无人机多光谱遥感对蔬菜氮素诊断具有一定的可行性。
, LI Ya-hao, WANG Ji-qing
China has a huge and intensive open-field vegetable production system. However, serious issues such as low water and nitrogen use efficiencies, as well as excessive fertilizer application, limit the sustainability of the system. To improve the efficiency of production and enhance accurate fertilization in large-scale vegetable cultivation systems, this study was conducted with open-field lettuce. Three treatments of no nitrogen (N0), low nitrogen (N1) and high nitrogen (N2) were established. An unmanned aerial vehicle (UAV) equipped with a multi-spectral camera was used to establish correlations between three multi-spectral vegetation indices (NDVI, RVI, and SAVI) and lettuce chlorophyll content, biomass, crop nitrogen uptake, and total nitrogen content. Models to predict total nitrogen content for single growth stage and multiple growth stages were developed. The results showed that: (1) during rosette and heading stages, NDVI, RVI and SAVI values increased with the amount of applied nitrogen, but that during harvest stage, maximum values occurred with the N1 treatment; (2) NDVI showed a significant correlation with lettuce yield, nitrogen uptake and chlorophyll content during heading stage; and the total nitrogen content of lettuce was significantly correlated with chlorophyll content at p<0.01 level, with a correlation coefficient ( R) of 0.51. When considering multiple growth stages together, NDVI values showed a significant correlation with lettuce yield, chlorophyll content, nitrogen uptake, and total nitrogen content at p<0.001 level, with correlation coefficients of 0.85, 0.82, 0.81, and 0.71, respectively. (3) Relationships of exponential, linear, logarithmic and power functions were fitted to the corresponding datasets, and the best prediction model of total nitrogen content for lettuce (N%=16.52ln(NDVI)+73.514) was established in the multiple growth stages. Using the lettuce total nitrogen content prediction model to obtain modeled values of total nitrogen content for the area of a commercial production field on the same farm, the average relative error was 3.2%, RMSE=0.556 6, NRMSE=0.010 8, showing accurate estimation of total nitrogen content. The results show that the model had good accuracy and that it is feasible to diagnose vegetable nitrogen content using unmanned aerial vehicle multi-spectral remote sensing.
露地蔬菜种植是我国蔬菜生产的重要方式。 到2021年, 露地蔬菜的播种面积为1 813万hm2, 产量为5.63亿t, 分别占我国蔬菜总产量的78.4%和总播种面积的68.2%[1]。 在露地蔬菜的种植中, 生菜是相对较小的品种, 随着鲜切菜和快餐业的持续发展, 生菜在蔬菜中的比重不断增加, 种植面积逐渐扩大, 其主产区集中在高原冷凉地区和特大城市周边区域, 呈集约化和规模化发展趋势[2, 3]。 然而在规模化种植中, 大尺度的水氮技术应用不足, 导致氮肥施用不当, 环境污染问题较为严重[4]。 因此, 在农场尺度上高效监测作物的氮素营养信息, 提高其氮肥利用效率, 为生菜规模化种植提供技术服务具有重要意义。
传统基于田块的诊断技术需要进行人工采样和实验室分析, 存在耗时长、 反馈延迟、 流程复杂等问题[5], 特别是在大规模生产中, 覆盖面积大、 取样点多, 工作量较大, 难以及时高效地为生产提供技术支持。 遥感技术是一种新的作物诊断方法和工具, 它能够实时、 动态地监测特定区域内作物的营养状况, 可以很好地满足生产需求[6]。 无人机遥感技术利用无人机搭载多光谱相机, 借助相应软件对遥感图像进行解析, 实现对作物生长过程的实时监测, 具备受天气影响小、 无损、 快速获取田间作物生长实时图像的优势[7, 8]。 迄今为止, 国内外学者已应用无人机和光谱成像技术对作物的生物量、 叶绿素含量、 营养状况、 叶面积指数、 灌溉量等进行了广泛的研究。 如: 陈浩等[9]通过无人机多光谱影像和田间实测数据, 建立了玉米冠层叶绿素含量遥感监测模型, 揭示了无人机多光谱遥感在夏玉米叶绿素含量实时监测方面的潜力; Corbari等[10]将冠层覆盖率和叶面积指数的无人机遥感数据与AquaCrop模型结合, 优化了意大利不同地区番茄和玉米田的用水效率, 为大面积灌溉技术提供了指导; Ren等[11]则通过不同角度的光谱影像研究生菜叶片的健康指标, 发现一种适用于无人机的低成本获取作物植被指数的方法, 为今后精准检测作物生长提供了理论和数据支持。
虽然在光谱遥感与作物特性之间的研究方面已取得许多成果, 但主要集中在玉米、 水稻、 大豆、 小麦等主要粮食作物, 对叶类蔬菜尤其是生长在高原冷凉地区的露地生菜的研究相对较少。 因此, 采用无人机搭载多光谱相机的遥感系统, 探究生菜在莲座期、 结球期、 收获期以及整个生育期内的多光谱植被指数积累情况, 构建多光谱植被指数与生菜氮素含量的数据集, 探讨两者之间的关系, 初步构建生菜氮素营养模型并进行验证, 为生菜无损快速氮素营养诊断提供数据参考, 以期更好的服务蔬菜规模化生产、 精准化管理。
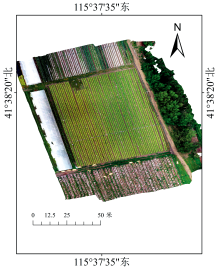
试验地点位于河北省张家口市沽源县北京市裕农公司蔬菜基地(东经115° 37'35″, 北纬41° 38'20″), 海拔1 420 m, 为高原冷凉地区。 农场占地面积90 hm2, 常年开展生菜规模化种植, 试验区面积3 000 m2(图1)。 土壤质地为草原栗钙土, 0~20 cm土壤基础理化性质为: 有机质18.3 g· kg-1、 碱解氮80.0 mg· kg-1、 有效磷31.3 mg· kg-1、 速效钾162 mg· kg-1、 pH值8.51。 试验于2021年6月5日种植, 7月28日收获, 全生育期53 d, 生育期内无明显病虫草害。 生长季平均气温18.0 ℃、 总降雨量为196 mm, 移栽后日均气温和降雨量见图2。
 | 图1 试验区地理位置Fig.1 Location of the experiment site |
 | 图2 移栽后平均气温和降水量Fig.2 Average air temperature and precipitation after transplanting |
供试作物: 结球生菜(品名: 射手101)。
供试肥料: UAN(尿素硝铵溶液, 含N 32%, 鲁西化工)、 APP(聚磷酸铵, 含N 11%, P2O5 37%, 瓮福集团)、 钾液(含K2O 30%, 北京市缓控释肥料工程技术研究中心); 过磷酸钙(含P2O5 18.0%)、 硫酸钾(含K2O 52%)、 磷酸二氢钾(含P2O5 54%、 K2O 32%)、 复合肥(15-15-15)、 有机肥(1.8-1.3-1.7)均为市售。
设置3个氮水平处理, 分别为: N0(不施氮肥处理)、 N1(低氮处理)、 N2(高氮处理)。 其中N0处理基肥为常规化肥过磷酸钙和硫酸钾, 追肥施用磷酸二氢钾、 钾液; N1、 N2处理基肥采用复合肥、 有机肥, 追肥施用: UAN、 APP和钾液。 各处理磷钾肥用量相同。 每个处理3次重复, 小区面积为160 m2(8 m× 20 m), 共1 440 m2。 每个小区在不同生育期多点采样, 数据用于构建模型和模型验证。 模型反演应用区为基地常规管理, 在结球期多点采样, 用于评价模型预测效果。
生菜定植前用机器撒施基肥、 整地作垄, 生育期内共追肥三次, 分别在移栽后的第10、 20和30 d(移栽后第10 d为提苗肥: 只施占追肥总量15%的氮肥; 移栽后第20 d: 施占追肥总量50%的氮肥、 70%的磷肥和50%的钾肥; 移栽后第30 d: 施占追肥总量35%的氮肥、 30%的磷肥和50%的钾肥)均以水溶肥膜下滴灌进行。 种植密度为6.7万株· hm-2。 各处理用肥量与施用时间见表1。
| 表1 不同处理的施肥量及追肥次数(kg· hm-2) Table 1 The amount and times of applied fertilizers for different treatments |
1.4.1 植株样品的采集与测定
在生菜的莲座期(移栽后31 d)、 结球期(移栽后42 d)、 收获期(移栽后53 d)测定生物量, 每个小区随机选取有代表性的5棵生菜, 采用称重法获取生菜的鲜重产量; 使用SPAD-502 plus叶绿素仪测定生菜叶片的SPAD值; 同时将样品带回实验室使用烘箱105 ℃杀青30 min, 在70 ℃条件下烘干至恒重, 计算地上部生物量; 粉碎后采用H2SO4-H2O2消煮处理, 凯氏定氮法测定植株全氮含量; 并计算其植株地上部吸氮量, 如式(1)[12]
植株地上部吸氮量(N kg· hm-2)=植株全氮含量(N%)× 植株生物量(kg· hm-2) (1)
1.4.2 无人机多光谱图像的获取与处理
在植株样品采集的同期进行, 以大疆精灵4代无人机作为平台, 搭载Survry3多光谱相机(1 200万像素=4 000× 3 000像素)在生菜莲座期、 结球期、 收获期, 选择光线较强的10:00— 14:00进行多光谱图像获取(如遇到阴、 雨天, 则适当往后延迟一天)。 使用DJGO pro软件进行无人机飞行航线规划, 设置无人机飞行高度为30 m, 飞行速度为5.6 m· s-1, 航向重叠率为75%, 旁向重叠率为75%; 多光谱相机快门时间和曝光率设置为自动调节模式, 并设置连拍, 时间间隔为1 s, 最终获取生菜试验田RGN色彩照片。 飞行前后使用漫反射标准板对多光谱相机进行校准并记录。
将多光谱图片导入电脑, 先使用AgisoftMetashp Professional软件对图像进行拼接处理; 完成后再使用ENVI 5.3软件对拼接的图片进行处理; 最后使用ArcMap 10.8软件处理; 即获取生菜各时期植被指数数据; 多生育期植被指数为各生育期指数的平均值。 植被指数计算公式如式(2)— 式(4)[13]
$归一化植被指数\left( \text{NDVI} \right)=\frac{{{R}_{\text{Nir}}}\ \ \ -\ \ \ {{R}_{\text{Red}}}}{\ \ \ \ \ {{R}_{\text{Nir}}}\ \ \ +\ \ \ {{R}_{\text{Red}}}\ \ \ \ \ }$(2)
$比值植被指数\left( \text{RVI} \right)=\frac{{{R}_{\text{Nir}}}}{\ \ \ \ {{R}_{\text{Red}}}\ \ \ \ }$(3)
$土壤调节植被指数\left( \text{SAVI} \right)=\left( 1+L \right)\frac{{{R}_{\text{Nir}}}\ \ -\ \ {{R}_{\text{Red}}}}{\ \ \ \ \ \ {{R}_{\text{Nir}}}\ \ +\ \ {{R}_{\text{Red}}}\ \ +L\ \ \ \ \ \ }$(4)
式(2)— 式(4)中, RNir、 RRed分别表示近红外、 红光波段光谱反射率。 式中L=0.5。
采用SPSS软件的ANOVA程序进行不同处理间的显著性分析(p< 0.05), 用Origin软件和Microsoft Excel制作图表。 多光谱照片使用AgisoftMetashp Professional软件进行拼接处理, 拼接图像采用ENVI 和ArcMap软件处理获取数据。 农学指标、 多光谱植被指数的相关关系采用皮尔逊相关分析, 用相关系数(R)表示相关程度。 植被指数与田间实测值采用线性、 幂函数、 指数函数、 对数函数回归分析; 用决定系数(R2)、 均方根误差(RMSE)和归一化均方根误差(NRMSE)综合评价和检验模型。 选取与全氮相关最好预测模型应用于试验区生菜进行无人机多光谱反演应用, 比较无人机多光谱模型与田间实测值的相对误差均方根误差(RMSE)和归一化均方根误差(NRMSE)检验模型反演应用效果。 决定系数(R2)表示回归方程与实测值的拟合程度, R2值越接近于1, 效果越好[14]; 均方根误差(RMSE)用来衡量实测值与模拟值的偏差, 值越小拟合效果越好[15]; 归一化均方根误差(NRMSE)小于10%模拟效果非常好, 10%~20%效果较好, 20%~30%效果一般, > 30%效果较差[16]。
不同氮水平处理下, 生菜各项指标均存在显著差异(表2)。 在整个生育期中, 不施氮肥的N0处理的产量、 叶绿素SPAD值、 吸氮量和植株全氮均表现最低。 与N1和N2处理相比, N0处理分别降低了1.07%~42.2%、 5.68%~15.0%、 0.37%~37.0%和2.54%~13.6%, 可见不施氮肥对生菜产生了明显影响。 在莲座期, N2处理的产量和吸氮量显著高于N1、 N0处理, 而植株全氮和叶绿素与N1处理无明显差异。 在结球期, 各处理在产量、 吸氮量和植株全氮之间无明显差异, 在叶绿素含量上N2处理较N1、 N0处理分别提高了17.6%和9.38%。 在收获期, N1处理和N2处理在产量、 吸氮量和植株全氮之间无明显差异, 但N1处理叶绿素较N2处理提高了12.5%。 全生育期内叶绿素对氮肥的响应表现明显, SPAD值随着氮肥施用量的增加而增加, 到收获期增加趋势变缓。 两个施肥处理收获期产量未达到显著差异, N2处理大量增施氮肥增产不明显。
| 表2 不同生育期生菜产量、 SPAD值、 吸氮量和植株全氮含量的变化 Table 2 The yield, SPAD, nitrogen uptake and total N content of lettuce at different growth stages |
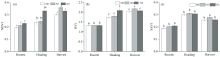
不同施肥水平导致不同处理间的生菜长势具有差异, 进而造成其对光的吸收和反射也存在显著性差异。 如图3所示, 不同处理的莲座期、 结球期和收获期生菜的归一化植被指数(NDVI)、 比值植被指数(RVI)、 土壤调节植被指数(SAVI)存在显著差异。 在莲座期和结球期, 生菜各处理NDVI值、 RVI值随施氮量的增加而增大, 即: N2> N1> N0; 但在收获期略有不同, N1处理值最大。 不同指数表现也存在不同, 除结球期N0和N1之间差异不显著外, 各处理的NDVI值均为显著差异, 且规律较为明显; 而SAVI在三个时期均有2个处理差异不显著, 说明其对不同处理差异的表征敏感性较低。 当NDVI值大于0时, 表示区域有植被覆盖, 并随覆盖度逐渐增大[17], Mohsen[18]的研究表明, 随氮浓度增加NDVI值呈线性增大趋势。 这与本试验中NDVI在莲座、 结球期的变化一致, 但在收获期, 高氮处理的NDVI呈现下降趋势, 显示出非线性变化。
 | 图3 不同生育期NDVI(a)、 RVI(b)和SAVI(c)Fig.3 The values of NDVI (a), RVI (b) and SAVI (c) of lettuce at different growth stages |
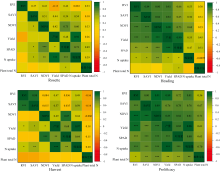
将生菜氮素信息和无人机搭载多光谱相机获取植被指数建立数据集, 比较NDVI、 RVI、 SAVI与生菜田间实测的产量、 叶绿素、 吸氮量和植株全氮含量的显著水平和相关系数(R)。 结果表明(图4), 在生菜的莲座期、 结球期、 收获期, 单一时期的NDVI、 RVI、 SAVI与植株全氮均未达到显著水平, 而多生育期NDVI、 RVI、 SAVI分别在p≤ 0.001、 p≤ 0.05、 p≤ 0.01与植株全氮显著相关, R值分别为0.71、 0.56、 0.67。 可以看出, NDVI与田间实测数据相关性较高。 因此选用NDVI对产量、 叶绿素、 吸氮量和植株全氮含量进行进一步分析。
 | 图4 不同生育期植被指数与生菜氮素关键信息的相关性分析(n=18) 注: * 、 * * 和* * * 分别表示在0.01< p≤ 0.05、 0.001< p≤ 0.01和p≤ 0.001水平下相关Fig.4 Correlation analysis between vegetation indexes and key information of nitrogen in lettuce at different growth stages (n=18) Note: * , * * and * * * indicate correlations at 0.01< p≤ 0.05, 0.001< p≤ 0.01, and p≤ 0.001, respectively |
在莲座期、 结球期和收获期, NDVI与生菜叶绿素均存在极显著相关(图4), R值分别为0.75、 0.73、 0.87, 而生菜全氮含量与叶绿素在莲座期和结球期达到了显著相关, 其中以结球期的R值最高(0.51); 在结球期, NDVI与生菜的产量、 吸氮量、 叶绿素均在显著相关性, 其中与吸氮量在p≤ 0.001水平下极显著相关, R值为0.90; 生菜全氮含量与NDVI未达到显著性水平, R值仅为0.23。 在生菜多生育期, NDVI值与生菜的产量、 叶绿素、 吸氮量和全氮含量均在p≤ 0.001水平下达到极显著相关, R值分别为0.85、 0.82、 0.81和0.71。 因此在结球期通过NDVI值与叶绿素、 叶绿素与全氮之间的关系建立生菜氮素预测模型; 而在多生育期, 则选用NDVI与全氮含量的关系建立生菜氮素预测模型。
不同生育期中NDVI与生菜的全氮含量、 产量、 吸氮量以及叶绿素之间的相关性表现出不同特点。 在莲座期和收获期, 其全氮含量与叶绿素、 吸氮量、 产量和NDVI之间的相关性均较低。 这可能由于生菜莲座期叶片较小、 土壤裸露较多, 植株覆盖度较低导致, 这与纪荣婷的观点一致[19]。 而在收获期, 中心结球部分保持绿叶, 但外部叶片出现黄化现象, 会对无人机多光谱检测产生影响[20]。 因此, 在这两个时期, 无人机获取的多光谱NDVI值与田间实测值之间的相关性较低。
田婷等[21]的研究表明, NDVI可以较准确地估测植株的生长情况, 但株高过高或过低均会影响NDVI的准确度。 此外, 牛庆林等[22]的研究指出, 结合多个时期监测和建模可以有效地提高冬小麦SPAD值的准确性。 生菜的生长是一个动态过程, 仅仅对单个生育期进行分析不足以解释其整体变化趋势。 相比之下, 多个生育期的综合计算可以更全面地说明生长信息与植被指数之间的关系, 并解释整个生育阶段植被指数的动态变化趋势。
通过比较相应数据拟合出指数、 线性、 对数和幂函数4种模型关系(表3), 发现在结球期, NDVI与叶绿素拟合的线性回归模型最佳, 具有最大决定系数和相对较小的均方根误差(R2=0.521 3, RMSE=1.933 1); 而叶绿素与全氮拟合的对数模型最佳, 决定系数最大, 均方根误差最小(R2=0.767 5, RMSE=2.090 2)。 因此, 在结球期通过拟合方程(5)代入到拟合方程(6), 从而建立出全氮与NDVI的预测模型(7)
| 表3 基于NDVI和叶绿素的生菜预测模型 Table 3 The prediction models for lettuce based on NDVI and SPAD |
在多生育期NDVI与全氮拟合的4种模型关系中, 对数模型拟合效果最好, 具有最大决定系数和最小的均方根误差(R2=0.733 6, RMSE=2.237 0)。 因此通过对数函数建立全氮回归预测模型(8):
结球期通过NDVI与叶绿素的线性回归以及叶绿素与全氮的对数回归建立生菜氮素预测模型, 在多生育期直接通过NDVI与全氮的对数回归建立生菜氮素预测模型。 结球期作为生菜生长最快、 吸收养分最多的时期, 是生菜氮素吸收的关键时期[23], 估测效果也最佳。 康雄等[24]发现对植被长期监测, 更有助于提高其准确性。 尽管使用单一关键时期的估测模型可以获得较好的监测效果, 但在全生育期内还应考虑对多个生育期的信息进行监测, 可以更全面地反映生菜的氮素营养状况。 因此, 应综合考虑单一关键时期和多个生育期的信息, 可以选择使用结球期和多生育期累积模型, 从而使预测结果更具科学性。
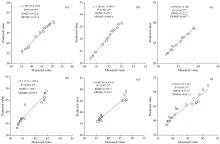
利用预测模型(7)和模型(8)计算结球期和多生育期生菜全氮预测值, 预测值和实测值验证结果见图5。 结球期预测模型对N0、 N1、 N2处理的预测值与实测值的拟合, 均达到p< 0.01极显著水平, R2分别为0.978 8、 0.987 4、 0.985 3, RMSE分别为0.835 8、 0.229 1、 0.422 2。 而在多生育期模型对N0、 N1、 N2处理的预测值与实测值拟合也达到极显著水平, R2分别为0.947 3、 0.924 5、 0.924 5, RMSE分别为1.496 1、 0.726 7、 0.374 2。 单生育期(结球期)和多生育期的NRMSE均小于10%。 综上, 全氮预测值验证预测模型决定系数R2均较高(> 0.9), 说明模型预测效果较好, 可以精确预测生菜全氮含量。
 | 图5 生菜全氮预测模型预测值与实测值验证 (a), (b), (c): 生菜结球期N0、 N1、 N2处理; (d), (e), (f): 多生育期N0、 N1、 N2处理Fig.5 Relationship between modeling predicted values and measured values of total N for lettuce (a), (b), (c): N0, N1 and N2 in the heading stage of lettuce; (d), (e), (f): N0, N1 and N2 in the multiple growth stages |
利用生菜氮素诊断模型[模型(8)], 以基地常规管理区[图6(a)]的数据进行模型反演评价。 对生菜结球期无人机测的多光谱图像进行预处理后, 获得生菜NDVI专题图[图6(b)], 并用生菜多生育期氮素预测模型(全氮=16.52ln(NDVI)+73.514)计算并生成生菜全氮含量估算专题图[图6(c)]。 经过随机调查模型反演区18个点位生菜植株全氮含量, 对全氮预测模型进行结果检验。 在18个点的调查中发现, 生菜全氮含量预测最大相对误差为13.0%, 最小相对误差为0.35%, 平均相对误差为3.22%; 而RMSE=0.556 6, NRMSE=0.010 8, 预测达到了较高的精度。
 | 图6 无人机多光谱反演生菜全氮含量 (a): 反演区位置; (b): NDVI反演; (c): 生菜全氮反演与实测值位点Fig.6 Retrieval of total N content in lettuce by UAV multi-spectral method (a): The location of inversion area; (b): NDVI inversion; (c): The sites of total nitrogen inversion and measured value of lettuce |
通过无人机多光谱信息与生菜氮素进行一系列研究, 旨在利用无人机快速监测的优势为农场或基地规模化种植提供技术服务。 尽管无人机遥感在监测精度方面表现出较高水平, 在农场尺度上可以快速且准确地完成作物诊断, 但在监测面积方面与其他遥感技术相比仍存在一定局限。 因此, 在更大尺度上(如县域、 相似气候区等), 进行监测和预测时需要将无人机遥感与其他技术(如卫星遥感或作物生长模型)相结合, 以提升监测精准度和监测范围[25, 26]。 同时, 天气因素对生菜的生长具有显著影响, 其生长和发育在很大程度上受环境条件的影响[27]。 因此, 在应用无人机遥感数据进行综合分析时, 还应结合作物栽培地区的气象数据, 以减少气候因素(如降雨和温度等)引起的差异, 这对于将预测模型应用于规模化种植提供技术服务具有重要意义。
通过无人机拍摄多光谱植被指数与生菜田间实测产量、 叶绿素SPAD值、 吸氮量、 全氮含量建立数据集进行分析发现, 在结球期, NDVI和叶绿素以及叶绿素和全氮含量之间存在显著的相关性, 以NDVI— 叶绿素— 全氮拟合后的对数模型效果最佳。 而在多生育期, NDVI与生菜产量、 叶绿素、 吸氮量和全氮含量均达到极显著相关, 相关系数分别为0.85、 0.82、 0.81和0.71, 全氮与的NDVI对数模型拟合效果最好。 应用生菜多生育期全氮估测模型反演基地生产田块全氮, 其平均相对误差为3.22%, RMSE=0.556 6, NRMSE=0.010 8, 表明通过无人机多光谱预测模型对全氮含量进行反演估测, 预测效果较好。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
|