
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于辐射传输模型探究机载高光谱激光雷达的植被垂直生化组分探测能力
[郝一硕1, 2  , 牛沂芳
, 牛沂芳1, * , 王力1 , 毕恺艺1 ]
, 牛沂芳, 王力|
|


作者简介: 郝一硕, 2001年生,中国科学院空天信息创新研究院博士研究生 e-mail: haoyishuo23@mails.ucas.ac.cn
自然环境下的植被群落, 由于各种群之间以及种群与环境间的竞争与选择, 常呈现出一定的垂直结构, 对于同一植株的不同生长阶段, 在垂直方向也有着不同的生理生化参数。 对这种三维立体分布特征进行探测, 能够进行生态环境立体化定量评价, 对森林碳储量估算和生物多样性保护等具有重要意义。 传统的被动光学遥感以及激光雷达在植被生化参数垂直探测方面有较大的局限性, 而高光谱激光雷达(Hyperspectral LiDAR, HSL)这一新型探测仪器的出现为探测植被生理生化参数垂直分布提供了新的手段。 但由于受到硬件方面的限制, HSL在机载平台下对森林复杂立体场景的适用性尚未得到充分研究。 故首先基于HSL原型样机在实验室开展小尺度的室内测量, 以火炬花植株为目标, 验证其对空间信息和光谱信息的一体化提取能力; 随后进一步使用三维辐射传输模型构建具有垂直异质性特征的森林场景, 模拟机载HSL设备实现森林的高光谱三维点云提取, 结合植被指数和随机森林模型对场景中三种不同植被冠层的叶绿素浓度和类胡萝卜素浓度进行反演。 结果表明: 室内实验证实了HSL回波信息可以有效区分植株不同高度处光谱曲线的差异, 火炬花上部红色叶片和下部绿色叶片的归一化植被指数分别小于和大于0.5; 基于三维辐射传输模型成功构建了虚拟森林场景的机载HSL高光谱三维点云, 在得到的24组植被指数中, 有17组指数表现出良好的探测精度(平均绝对百分比误差MAPE<13%); 植被叶绿素反演模型 R2达到0.93, 上层、 中层和下层的平均绝对误差MAE分别为6.26、 3.40和2.81; 类胡萝卜素反演模型 R2为0.91, 上层、 中层和下层的MAE分别为1.59、 2.58和0.39。 该研究显示出HSL设备是一种立体化提取植被光谱信息的有效手段, 在探测森林等复杂植被场景的生化组分垂直分布方面具有巨大的应用潜力。
In natural environments, vegetation communities often demonstrate vertical structure due to competition and natural selection among plant groups and between populations and their environment. Different growth stages of the same plant also exhibit various structural and biochemical parameters in the vertical dimension. Detecting these three-dimensional spatial distribution features enables quantitative assessment of ecological environments in three dimensions, crucial for estimating forest carbon reserves and biodiversity conservation. Traditional passive hyperspectral remote sensing and lidar techniques face significant limitations in vertical vegetation profiling. However, the emergence of Hyperspectral LiDAR (HSL), a new type of sensing instrument, offers a fresh approach to studying the vertical distribution of physiological and biochemical parameters in vegetation. Yet, due to hardware constraints, the suitability of HSL under unmanned aerial platforms for complex three-dimensional forest scenes remains insufficiently explored. This paper begins with laboratory experiments using a prototype HSL to conduct small-scale indoor measurements with torch flower plants as the target to verify its integrated capability in extracting spatial and spectral information. Subsequently, the three-dimensional radiative transfer model LESS was used to simulate forest scenes with vertical heterogeneity. The model simulated airborne HSL devices for extracting hyperspectral three-dimensional point clouds of forests. Vegetation indices and a random forest model are utilized to invert chlorophyll and carotenoid concentrations in forest canopy layers. The results show that in indoor experiments, the HSL echo information effectively discriminates the spectral differences at different heights of plant structures. The NDVI values in the upper red leaf area and lower green leaf area of torch flowers are respectively less than and greater than 0.5. The LESS model successfully constructed high-resolution hyperspectral three-dimensional point clouds of forest scenes. Out of 24 groups of vegetation indices, 17 groups exhibit good detection accuracy (MAPE<13%). The chlorophyll concentration inversion model demonstrates an R2 of 0.93 with MAE values of 6.26, 3.40, and 2.81 for the upper, middle, and lower layers, respectively. The carotenoid concentration inversion model shows an R2 of 0.91 with MAE values of 1.59, 2.58, and 0.39 for the upper, middle, and lower layers, respectively. This study indicates that HSL is an effective device for extracting vegetation spectral information in three dimensions and possesses immense potential for investigating the vertical distribution of biochemical components in complex vegetation scenes such as forests when deployed on aerial platforms.
森林是地球生物圈的重要组成部分, 同时也是陆地生态系统最主要的碳汇之一, 在缓解全球气候变化、 涵养水源、 保持生物多样性等方面发挥着不可或缺的作用[1, 2]。 森林植被群落中的植物个体由于受到阳光、 养分和水分等因素的影响, 在垂直方向上会发生自然竞争, 从而表现出一定的分层结构, 一般可根据高度划分为乔木层、 灌木层和草本层[3, 4]。 垂直结构是森林植被群落的基本特点, 也是衡量森林生态系统稳定性的一个重要指标[5]。 对于同一植株的不同生长阶段, 在垂直方向也有着不同的结构和生化组分。 因此, 为了准确掌握森林植被的生长状况, 不能忽略生化参数在垂直方向上的异质性。
然而, 野外林业调查十分费时费力, 且难以进行大范围的研究。 近几十年来, 遥感技术的发展为解决这一问题提供了新的思路和方法[6]。 传统的植被遥感通常采用被动式探测技术, 获取目标的反射光谱信息, 通过构建植被指数等方法来表征地表植被状态。 随着传感器光谱通道的增多, 该方法得到了持续快速的发展, 并已广泛应用于生态研究[7]。 但在实际的生态系统中, 植被常常呈现出垂直分层的立体结构, 被动遥感得到的光谱反射率, 实际上由多层植被枝叶和土壤背景等叠加而成。 此外还受到太阳几何、 冠层结构等因素影响, 从而产生较大的不确定性。 多角度遥感可以在一定程度上获取植被垂直结构, 但在关键位置数据获取方面有一定困难[8]。 激光雷达作为一种新兴的主动式探测技术, 可以精准高效地对目标三维空间结构进行测量, 已经在林学和生态学等领域取得了根本性的进展[9], 但受限于单波段探测的机制, 难以获取目标的光谱信息。 为了结合主被动遥感探测手段各自的优势, 有学者提出将两种传感器进行数据后处理融合[10, 11, 12], 但点云数据与影像数据理论上无法实现完全匹配, 难以进行实际应用。
近些年来, 国内外多个机构开展了高光谱激光雷达(hyperspectral LiDAR HSL)这一新型遥感设备的研制和应用工作[13]。 通过使用超连续谱激光光源替代原有的单色激光器, 并将回波信号送入分光装置进行分光, 从而得到各个波段的后向散射强度, 实现空间位置和光谱信息的一体化探测。 Hakala等[14]通过云松探究了HSL反演针叶叶绿素含量的能力; Junttila等[15]证实了HSL对森林干旱的监测潜力; Du等[16]利用植被指数探究了HSL对叶片尺度氮含量的反演能力; 高帅等和Bi等[17, 18]探究了HSL在植被生化组分三维分布方面的探测能力。 但目前现有的HSL系统大都处于原理样机阶段, 相关研究也以实验室近距离探测为主, 其在室外复杂场景下对植被冠层尺度的探测能力尚不明晰。 为了解决硬件方面的限制, 使用三维辐射传输模型进行模拟实验是一种可行的方法[19]。
在植被遥感领域, 先后出现过多种描述太阳与冠层相互作用的模型, 如一维辐射传输模型将植被冠层简化为简单的水平结构、 几何光学模型将树冠抽象为固定形状的几何体等[20]。 而三维辐射传输模型使用三角面片或浑浊体元来构造复杂的三维场景并基于光线追踪算法模拟辐射的传输过程, 具有更高的精度和可靠性, 如DART(discrete anisotropic radiative transfer)模型、 LESS(large-scale remote sensing data and image simulation framework)模型等[21]。 已有许多学者使用该类模型进行植被的模拟分析和LiDAR遥感研究, 如曾毓燕等使用DART模型分析了植被指数与桉树叶绿素含量的关系[22]; Zhao等利用LESS模型评估了机载HSL监测森林病虫害的潜力[19]。
本研究首先使用HSL原型样机进行实验室实测, 验证该仪器对空间信息和光谱信息的一体化获取能力, 然后利用LESS模型, 构建具有分层结构的植被群落场景, 模拟机载HSL设备进行多种植被指数的探测, 并通过随机森林模型反演不同垂直高度处的植被冠层叶绿素和类胡萝卜素浓度, 旨在探索HSL在室外复杂场景中提取植被冠层生化组分的潜力。
1.1.1 HSL仪器数据采集
使用本课题组研制的32波段高光谱全波形激光雷达样机, 探测范围为409~914 nm。 该设备由主控机、 超连续谱脉冲激光器、 二维扫描转台、 信号发射与接收装置、 多通道全波形探测单元等部分组成。 光源发出的宽谱激光经准直器汇聚后发散角小于3 mrad, 之后沿望远镜光轴发射出去, 与此同时有少量光线经微分透镜进入示波器作为发射信号触发电平采集。 目标的后向散射信号进入消色差折射式望远镜, 经光栅分光装置划分为32个波段, 并投射到相应的线阵探测器上。 高速示波器对信号进行实时采样生成数字化波形, 最后输出到主控机完成存储。
选取的观测目标为百合科多年生草本植物火炬花, 并在相同距离放置99%标准反射板作为参照物。 高光谱激光雷达通过扫描云台控制激光脚点在X和Y方向的移动, 步进水平和竖直分辨率分别为0.026°和0.013°。 在每个激光脚点处进行32个通道的测量。 由于采集系统示波器最多允许四通道数据同步, 我们选择将多通道的信号分批次进行输出, 以实现32个波段的采集。 扫描控制流程如图1所示。 将回波信号经过数据清洗、 噪声去除、 波段分割、 波形分解等流程处理, 即可得到目标的高光谱三维点云[x, y, z, R(λ)]。 通过观测与目标等距离放置的99%标准反射板, 可以进一步计算出目标点云的光谱反射率。 由于观测时激光束与目标表面一般会有一个夹角, 导致观测值比真实值偏低, 还需要根据雷达方程进行入射角效应的校正。
 | 图1 HSL扫描控制流程Fig.1 Hyperspectral LiDAR scanning control flowchart |
1.1.2 数据校正
激光雷达向目标发射激光束并接收目标的后向散射, 当把目标近似看作朗伯体时, 系统接收到的回波信号功率可用雷达方程描述[23]
式(1)中, Pr是接收到的回波信号功率(W), Pt是激光发射功率(W), D为接收器孔径(m), ρ是目标表面反射率, θ是激光束与目标表面法向量的夹角, R是仪器与目标间的距离(m), η sys和η atm分别是系统损耗和大气损耗。
高光谱激光雷达的辐射传输过程同样适用该方程, 可以看出, 回波功率除与目标本身特性有关外, 还受入射角、 距离、 大气和传感器因素影响。 在本实验中, 每个波段的反射率是目标回波强度与99%标准反射板在与目标相同距离处的回波强度之比, 此过程可一定程度上消除距离、 大气和传感器因素的影响。 此外, 计算入射角的余弦值并除去, 以对角度效应进行改善。 当入射角超过一定阈值时, 可能会发生过校正, 故将角度阈值设置为60°进行入射角校正。
1.2.1 垂直异质性森林场景构建
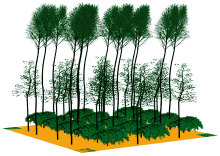
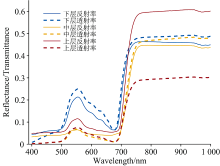
LESS是基于光线追踪的三维辐射传输模型, 可以模拟光线在真实结构下的散射和吸收等过程, 并输出相应的遥感数据。 为了探究机载HSL对森林植被的探测能力, 首先使用LESS模型创建了尺寸为20 m×20 m的正方形样地, 在样地内构建具有三维垂直结构的森林场景如图2所示, 上层、 中层和下层植被分别为白杨树(Populus alba L.)、 槭树(Acer pseudoplatanus L.)、 葡萄藤(Vitis vinifera L.)。 场景中的植被三维模型来自辐射传输模型对比计划(radiation transfer model intercomparison, RAMI4)从欧洲和南非地区采集的真实植被模型(http://rami-benchmark.jrc.ec.europa.eu/), 光谱和生化组分信息来自ANGERS公开数据集[24], 各部分的反射与透射光谱曲线如图3所示。
 | 图2 使用LESS模型创建的森林三维场景Fig.2 Three-dimensional forest scene created by LESS |
 | 图3 虚拟森林场景植物原始光谱Fig.3 Original spectra of plants in the virtual forest scene |
ANGERS数据集是由Jacquemoud, Bidel, Franç ois, Pavan等在法国昂热市采集的叶片光谱属性数据; 他们采集了43种不同植物, 样本数为276, 包括光谱分辨率1 nm光谱范围为400~2 450 nm的叶片反射率和透射率, 以及叶绿素a、 叶绿素b、 类胡萝卜素、 花青素、 叶片等效含水量、 比叶重等多种参数。 本实验选用ANGERS公开数据集的部分光谱曲线对森林场景上、 中、 下层植被冠层的光谱属性进行赋值, 其余数据则作为训练样本用于构建随机森林模型反演植被叶绿素浓度和类胡萝卜素浓度垂直分布。
1.2.2 模拟机载HSL测量
LESS模型已经通过RAMI在线模型检查器(RAMI online model checker, ROMC)[25]的验证, 并表现出了良好的精度和可靠性。 模拟过程使用了LESS模型的机载激光雷达(ALS)模式, 波段设置为与室内试验的HSL仪器相同的32波段, 将得到的回波数据进行高斯分解生成高光谱三维点云, 通过进一步数值计算可以得到植被指数点云。 在场景创建和数据模拟过程中输入到LESS模型的各项参数见表1。
| 表1 LESS模型场景及仪器参数 Table 1 Scene and instrument parameters in LESS |
1.2.3 随机森林模型反演
随机森林(random forest, RF)模型是一种最具代表性的基于Bagging的集成学习方法, 将多个决策树集成在一起并通过投票或取平均值给出最终预测结果, 能有效提升模型的泛化能力, 在各种分类和回归问题中都得到了广泛的应用[26]。 选取8种植被指数(表2)作为随机森林模型的参数, 分别反演森林场景中不同高度植被冠层的叶绿素浓度和类胡萝卜素浓度。
| 表2 八种与色素相关的植被指数 Table 2 Eight vegetation indices related to pigments |
1.2.4 精度评价
为了评估随机森林模型的精度与可靠性, 通过五折交叉验证方式来测试模型性能, 每次将样本随机分为训练(80%)和测试(20%)数据集, 如此重复五次, 直到所有数据均被测试, 并使用决定系数(coefficient of determination, R2)和均方根误差(root mean square error, RMSE)作为评价指标, R2越高说明模型适用性越强, RMSE越小说明模型精度越高。
为了评估机载HSL对不同高度植被冠层的探测效果, 使用平均绝对百分比误差(mean absolute percentage error, MAPE)作为植被指数探测精度的评价指标; 使用平均绝对误差(mean absolute error, MAE)和R2作为生化组分反演结果的评价指标。
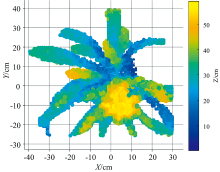
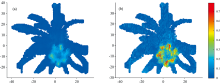
将收集到的回波信号进行处理, 可视化得到高光谱三维点云, 观察点云的高程分布, 从图4可以看出HSL设备可以准确分辨目标结构的垂直高度。 利用激光雷达方程对回波信号进行矫正的结果如图5所示。 可以看出, 由于火炬花上部叶片的叶倾角较大, 导致回波信号比真实值偏弱, 而校正之后则与下部叶片的分层现象更为明显。
 | 图4 火炬花结构垂直分布Fig.4 Vertical distribution of torch flower structure |
 | 图5 反射率校正后的火炬花结构垂直分布(以637 nm为例) (a): 校正前; (b): 校正后Fig.5 Verital distribution of torch flower structure after reflectance correction (at 637 nm) (a): Before correction; (b): After correction |
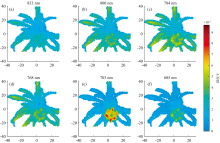
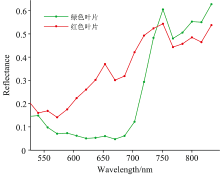
图6展示了其中6个波段的回波强度信息, 可以看出, 红色叶片和绿色叶片的光谱反射特征有着明显差异。 两种叶片的典型光谱曲线如图7所示, 由于绿色叶片中含有更多的叶绿素, 所以反射率在红边波段呈现出了典型的陡峭变化, 而在红色光波段, 红色叶片反射率明显高于绿色叶片, 由此可见HSL设备能敏感地探测出植物生化参数的变化。 通过对点云的光谱反射率进行运算, 可以得到目标的归一化植被指数(normalized difference vegetation index, NDVI)三维点云如图8所示, 对其垂直分布进行统计可以看出, 火炬花上部红色叶片区域(50~60 cm)有96%的点NDVI<0.5, 下部绿色叶片区域(0~50 cm)有95%的点NDVI>0.5。 在目标5~20 cm处有少量离散点出现, 可能是由于激光点落在叶片边缘部位产生边缘效应所导致。
 | 图6 点云反射强度Fig.6 Point cloud reflection intensity |
 | 图7 两种叶片的光谱曲线Fig.7 Spectral curves of two types of leaves |
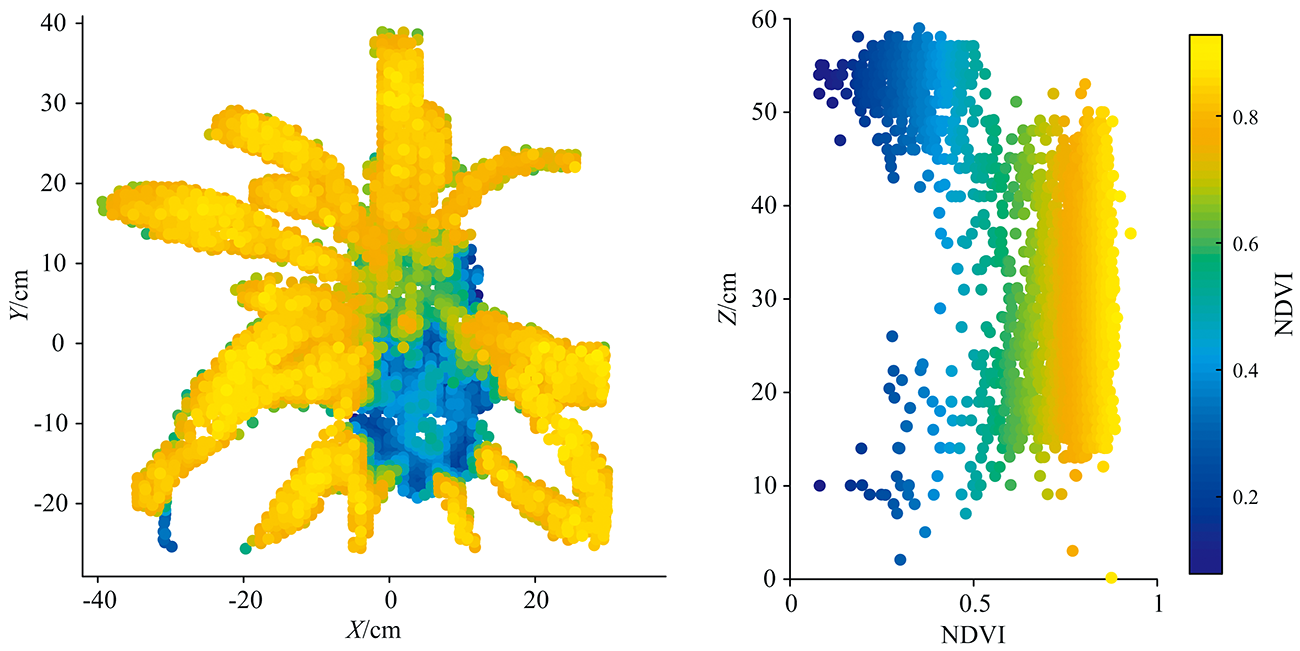 | 图8 火炬花NDVI垂直分布Fig.8 Vertical distribution of NDVI for torch flowers |
2.2.1 机载HSL三维点云
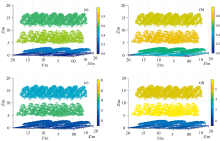
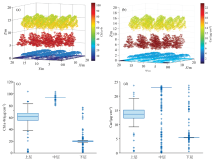
LESS模型模拟数据经高斯分解可以得到全部32波段的三维点云, 使用python3.7对数据进行波段分割, 并通过Cloud Compare v2.12软件对各波段点云进行精细配准。 为了更加清晰的反应出分层植被的生化组分信息, 选取了8种与植被色素含量有较高相关性的植被指数(表2), 并将场景按垂直高度划分为三个层次, 大于10 m的部分为上层, 3~10 m为中层、 0.2~3 m为下层。 图9展示了其中4种植被指数的三维点云, 可以清晰地看到, 场景中不同结构的植被指数有着明显差异, 都呈现出了中间层最高、 上层略低, 下层最低的特征, 这与原始数据中三种植物的叶绿素浓度高低表现一致。
 | 图9 LESS模拟的植被指数三维点云 (a): RENDVI; (b): SIPI; (c): CIrededge; (d): CIgreenFig.9 3D point cloud of vegetation index simulated by LESS (a): RENDVI; (b): SIPI; (c): CIrededge; (d): CIgreen |
对三个垂直高度层的8种植被指数进行计算, 得到24组结果如表3所示, 其中真实值由输入到LESS模型的原始光谱计算得到, 模拟值为该高度层植被指数点云的平均值。 使用MAPE来衡量探测准确度, 并划分为优秀(MAPE<3%)、 较好(3<MAPE<13%)和较差(MAPE>13%)三个等级。 结果显示NDVI、 RENDVI、 SIPI在各个高度都取得了优秀的探测效果, PRI在上、 下两层效果优秀、 CIred edge和CIgreen则在中、 上两层效果优秀, 而CAI和MCARI整体效果均较差。 可以看出随着高度降低, 由于受到边缘效应等因素的影响, 探测效果优秀的植被指数数量有所下降(上层6种、 中层5种、 下层4种)。
| 表3 各层植被指数真实值、 模拟点云均值、 MAPE Table 3 Real values, simulated point cloud mean values, and MAPE of vegetation index at each vertical level |
边缘效应的产生是由于HSL设备发射的激光具有一定的发散角, 脉冲在到达目标时并非一个点, 而是具有一定面积的激光足迹, 如果落在目标边缘部位就会导致有一部分脉冲能量穿过目标到达背景, 从而导致回波信号产生衰减或将目标和背景的信息混合[27], 如何解决这一问题仍需从硬件或算法层面进行进一步研究。
2.2.2 森林垂直生化组分反演
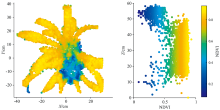
叶绿素和类胡萝卜素是植物吸收光能的重要色素, 与植被的光合作用能力、 发育阶段、 氮素胁迫等状况密切相关[36]。 在创建LESS虚拟场景时使用了ANGERS公开数据集的部分数据作为场景的输入光谱(图3), 现将其余数据作为训练样本用于构建随机森林模型, 使用8种植被指数作为自变量, 分别反演植被的叶绿素浓度和类胡萝卜素浓度。 五折交叉验证的结果如图10所示, 反演叶绿素的模型R2=0.94、 RMSE=5.25 μg·cm-2; 反演类胡萝卜素的模型R2=0.87、 RMSE=1.78 μg·cm-2。
 | 图10 RF模型交叉验证结果Fig.10 Cross-validation results of the RF model |
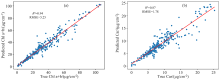
图11(a)、 (b)是将RF模型应用于LESS模拟点云所得到的生化组分三维点云, 图11(c)、 (d)显示了不同高度层的生化组分反演结果。 表4中的真实值为ANGERS数据集中的实测数据, 反演值为点云反演结果的平均值, 结果显示, 上层、 中层和下层植被的叶绿素浓度MAE分别为6.26、 3.40和2.81 μg·cm-2, 总体R2=0.93; 上层、 中层和下层植被的类胡萝卜素浓度MAE分别为1.59、 2.58和0.39 μg·cm-2, 总体R2=0.91。 由三维辐射传输模型的模拟结果可以看出, 机载HSL设备对于森林植被生化组分的垂直提取表现出巨大的潜力。 由于高光谱点云同时包含了空间位置信息和丰富的光谱信息, 可以通过垂直高度轻松剔除土壤背景的影响, 也可以从点云中进一步划分出植被群落的不同结构, 为精细化森林监测提供了新的手段。
 | 图11 分层生化组分反演结果 (a), (c): 叶绿素浓度反演结果; (b), (d): 类胡萝卜素浓度反演结果Fig.11 Layered biochemical component inversion results (a), (c): Chlorophyll concentration inversion results; (b), (d): Carotenoid concentration inversion results |
| 表4 分层生化组分反演结果 Table 4 Inversion results of layered biochemical components |
使用HSL原型样机对火炬花植株进行实验室实测, 证实了该设备对植株结构和光谱信息的一体化提取能力, 并基于三维辐射传输模型LESS创建了具有分层结构的虚拟森林场景, 模拟验证了机载HSL对森林立体场景植被垂直生化组分的探测能力, 得出以下结论:
(1)实测结果显示, HSL设备能够在实验室环境下有效实现对植被空间结构信息和光谱信息的一体化探测。 火炬花不同垂直高度处的光谱特征具有明显差异, 其上部红色叶片区域(50~60 cm)有96%的点NDVI<0.5, 下部绿色叶片区域(0~50 cm) 有95%的点NDVI>0.5。
(2)LESS模型模拟结果显示, 机载HSL设备能够对森林中不同高度植被的光谱信息进行立体化探测, 在模拟的三个高度层共24组植被指数中, 有17组达到了较好或优秀水平(MAPE<13%), NDVI、 RENDVI、 SIPI在各个高度都取得了优秀的探测效果(MAPE<3%)。 但值得注意的是, 由于受到边缘效应等因素的影响, 随着高度降低, 探测效果优秀的植被指数数量有所下降(上层6种、 中层5种、 下层4种), 如何解决这一问题仍需后续从硬件和算法层面深入研究。
(3)构建随机森林模型对不同高度层的植被叶绿素浓度和类胡萝卜素浓度进行反演, 五折交叉验证的结果显示, 反演叶绿素的模型R2=0.94、 RMSE=5.25 μg·cm-2; 反演类胡萝卜素的模型R2=0.87、 RMSE=1.78 μg·cm-2。 将模型应用于LESS点云, 反演叶绿素浓度的R2=0.93, 上层、 中层和下层的MAE分别为6.26、 3.40和2.81 μg·cm-2; 反演类胡萝卜素浓度的R2=0.91, 上层、 中层和下层的MAE分别为1.59、 2.58和0.39 μg·cm-2。 结果显示HSL设备在探测森林植被生化组分垂直分布方面表现出了巨大的潜力。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
|
| [30] |
|
| [31] |
|
| [32] |
|
| [33] |
|
| [34] |
|
| [35] |
|
| [36] |
|