









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
针对船舶排放污染物分布监测的地基快速IDOAS技术研究
[胡春桥1, 2  , 罗宇涵
, 罗宇涵1, * , 宋润泽1, 2 , 常振1 , 奚亮1 , 周海金1 , 司福祺1 ]
, 罗宇涵, 宋润泽|
|


作者简介: 胡春桥, 1997年生, 中国科学院安徽光学精密机械研究所硕士研究生 e-mail: cqhu@aiofm.ac.cn
针对我国船舶排放污染物防治的迫切需求, 2021年中国出台了《船舶大气污染物排放监测通用要求》, 对船舶大气污染物排放的监测精度提出了更高的要求。 现阶段, 我国内河中的多数船只都以低端柴油发动机作为主要动力来源, 并在未来的很长一段时间内, 柴油机都将继续作为船舶的主要动力装置使用。 船舶使用的油品通常杂质多、 品质差, 加上柴油发动机大多较为老旧, 老化的柴油发动机工作时会排放大量硫氧化合物、 氮氧化合物等大气污染物, 对大气环境造成严重危害, 因此对于船舶大气污染物排放的监测研究尤为重要。 基于成像差分吸收光谱技术研制了一套地基快速成像差分吸收光谱系统, 能够实现对污染物空间分布的“拍照”式探测。 系统时间分辨率可达秒级, 系统视场角为6°×6°。 选择无云条件下的正午天顶太阳散射光光谱作为参考光谱并使用QDOAS软件对获得的数据进行反演。 根据系统中摄像头采集到的观测区域图像信息, 将污染气体浓度信息与空间信息进行匹配, 能够获得船舶大气污染物的空间二维分布情况。 为验证系统的可靠性, 2022年9月, 在铜陵以发电厂烟羽中的SO2为目标进行了比对验证实验, 并与推扫地基成像差分吸收光谱仪器的结果进行了相关性分析, SO2斜柱浓度的相关性为0.935。 2022年12月, 采用地基快速成像差分吸收光谱系统对长江船舶污染物排放进行了观测, 获取了时间分辨率为5 s的SO2连续空间二维分布信息, 通过与摄像头获取的图像信息匹配, 能够将高浓度排放追溯到具体船只。 该研究为船舶等快速移动污染源的监测提供了有效的实时监测手段, 为船舶排放的治理提供了可靠的数据支撑。
In order to meet the needs of the prevention and control of pollutants emitted from ships in China, China issued the General Requirements for the Monitoring of Air Pollutant Emission from ships in 2021, and monitoring air pollutants from ships has become an urgent task. Currently, most ships in inland rivers in China use low-end diesel engines as the main power plant, and diesel engines will continue to be used as the main power plant for a long time in the future. The oil products used by ships usually have many impurities and poor quality. Coupled with the fact that most diesel engines are relatively old, they will continue to emit air pollutants such as sulfur oxides and nitrogen oxides when sailing and entering and leaving the port, which cause serious harm to human health and atmospheric, ecological environment, so the monitoring and research of pollutants in ship exhaust are particularly important. In this paper, based on the imaging differential absorption spectroscopy technology, a ground-based fast imaging differential absorption spectroscopy systems is developed, which can detect the spatial distribution of pollutants. The time resolution of the system can reach seconds, and the field of view angle of the system is 6°×6°. The data inversion is based on the QDOAS software, and the solar scattering spectrum of the zenith at noon is selected as the reference spectrum to retrieve the inclined column concentration of the polluted gas in the observation area. According to the image information of the observation area captured by the camera in the system, the two-dimensional spatial distribution image of pollutants can be obtained by matching the pollutant concentration information with the spatial information. In order to verify the reliability of the system, a comparative verification experiment aimed at SO2 in the smoke plume of a power plant was carried out in Tongling in September 2022, and the results were compared with the results of the sweep ground-based imaging differential absorption spectrometer. The results show that the correlation of SO2 inclined column concentration is 0.935. In December 2022, the pollutant emission from ships along the Yangtze River was observed by using the ground-based fast imaging differential absorption spectroscopy system, and the continuous spatial two-dimensional distribution information of SO2 with a time resolution of 5 s was obtained. by matching with the image information obtained by the camera, the high concentration emissions can be traced back to specific ships. This study provides an effective real-time monitoring means for ships and other fast-moving pollution sources and provides reliable data support for treating ship emissions.
目前, 我国船只数量众多, 且内河中的多数船只都以低端柴油发动机作为主要的动力来源, 且在未来的很长一段时间内, 柴油机都将作为船舶的主要动力装置。 同时我国内江船舶散货船比例较高, 船舶的平均使用时间较长, 柴油机老化情况比较严重, 柴油品质较差, 其中杂质较多, 导致船舶废气排放污染日益加剧[1]。 近年来, 国内外先后开展了对于船舶大气污染物排放的监测研究。 Kai Krause等使用LP-DOAS仪器对Elbe河主航道中船舶排放的SO2和NO2进行了观测研究, 提出了一种不同痕量气体的船舶排放率的计算方法[2]。 Osorio等利用车载DOAS仪器和SO2紫外相机对港口船舶尾气中的SO2进行了观测, 利用车载DOAS确定排放源位置, 然后利用SO2紫外相机获取更高时空分辨率的精确结果, 从而量化船舶SO2排放[3]。 André Seyler等使用MAX-DOAS仪器对德国Elbe河主航道的船舶排放进行了为期3年的观测研究, 证实了排放控制区在实行更加严格的燃料硫含量限制政策的有效性[4]。 Berg等使用机载DOAS仪器对波罗的海船舶排放烟羽中的SO2和NO2进行了观测, 首次将DOAS方法应用于利用海面太阳散射光来测量船舶气体排放, 并提出使用空中光学测量获得航行船舶气体通量的新方法[5]。 复旦大学王珊珊等使用MAX-DOAS仪器对上海和深圳的中国船舶排放控制区内船舶排放的SO2和NO2进行了测量, 研究了船舶停靠、 内河航行和深水港进出港三种情况船舶的排放情况, 并利用SO2/NO2比值计算了燃油硫含量[6]。 陈命男等使用LP-DOAS技术对黄浦江下游船舶的大气污染物排放情况进行了研究, 提出污染浓度具有“ 假期效应” 的时间变化特征[7]。 相较于汽车及工业排放, 船舶尾气由于位于水面之上排放, 其监测和治理难度较大。 对船舶排放的有效监测能够为船舶排放的治理提供可靠的数据支撑。
成像差分吸收光谱技术(imaging differential optical absorption spectroscopy, IDOAS)是一种被动光源测量技术, 可用于获取大气污染气体的空间浓度分布信息。 IDOAS技术的主要优势在于可以通过推扫的方式获取高分辨率的痕量气体斜柱浓度的空间分布信息。 Falko Lohberger等利用地基IDOAS仪器首次对地面工业排放源排放羽流中的NO2含量进行监测[8]。 Enno Peters等提出一种新型地基IDOAS仪器, 能够在大垂直视场范围内获取观测点全方位角的全景NO2垂直剖面, 并利用该仪器重建了污染物迁移事件期间羽流的轨迹[9]; Bobrowski等使用地基IDOAS仪器对意大利埃特纳火山口SO2羽流进行了观测实验, 证明了IDOAS仪器用于火山过程研究的可能性[10]; Lee等在2006年CARE BEIJING综合观测实验期间使用地基IDOAS仪器观测了北京上空NO2分布, 研究了具有多个分布式排放源的城市地区的NO2浓度的变化情况[11]。 安徽光学精密机械研究所的司福祺、 刘进等基于地基IDOAS开展了一系列对城市分布式点源NO2及工业废气羽流SO2二维分布的观测[12, 13, 14, 15]。 综上所述, 地基IDOAS仪器主要应用于观测静态分布式点源污染排放及大气边界层污染的观测研究, 对于移动速度较快的点源污染排放, 例如船舶尾气排放, 需要发展时间分辨率更高的“ 拍照式” IDOAS, 从而有效捕捉移动源污染。
针对快速移动点源排放的污染物的监测需求, 基于IDOAS技术对船舶污染物排放监测的快速成像方法展开研究, 对测量的基本原理及仪器系统进行介绍。 通过光谱遥测的方法获取观测区域内污染物浓度信息, 利用摄像头获得观测区域空间图像信息, 通过匹配空间信息与污染物浓度信息, 获得船舶大气污染物的空间二维分布情况。 2022年9月和12月分别在铜陵市工业园区和长江某码头对烟囱和内河船舶排放的烟羽进行了测量, 并对获得的实验数据进行了综合分析。
IDOAS技术以仪器观测方向上的大气分子和颗粒散射的太阳光作为光源, 利用痕量气体的特征吸收强度计算被测烟羽中污染气体的浓度。 将获取的气体浓度信息与观测区域的空间图像信息进行匹配, 以获得污染气体的二维空间分布情况。
本工作使用的地基快速IDOAS系统主要由紫外镜头、 光学导入系统、 摄像头、 带温控的成像光谱仪、 计算机及二维旋转云台等构成, 如图1(a)所示。 紫外镜头所捕获的散射太阳辐射, 通过光学导入系统进入成像光谱仪, 进行光谱信息的模数转换, 并将转换后的信息传输至计算机存储。 利用DOAS方法对采集到的每条光谱进行反演处理, 从而获得整个观测区域内沿光传输路径上的污染气体斜柱浓度, 再对反演所得结果与摄像头获得的空间信息进行匹配和优化, 获得污染气体浓度的可视化空间分布图, 如图1(b)所示。
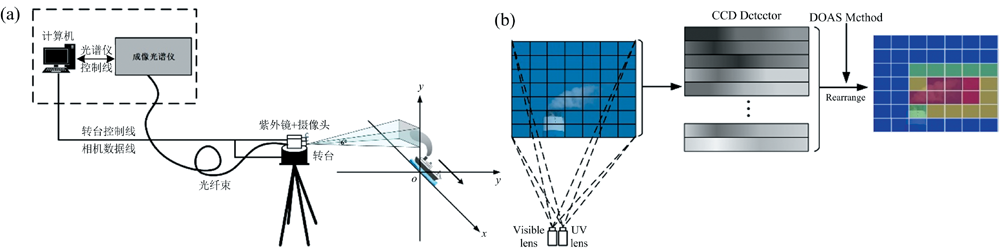 | 图1 地基快速IDOAS系统 (a): 系统测量示意图; (b): 系统成像原理示意图Fig.1 Ground-based fast IDOAS system (a): Schematic diagram of system measurement; (b): Schematic diagram of system imaging principle |
太阳散射光由紫外镜头收集并通过光纤束进入入射狭缝, 入射光经过光栅色散后入射到面阵CCD, 系统光谱仪中使用的面阵CCD来自FLI公司的ML4720, 光谱仪结构见图2。 由面阵CCD对光谱信号进行光电信息转换, 并传给计算机进行记录存储。 面阵CCD为1 024 pixel× 1 024 pixel(单个像元大小为13 μ m× 13 μ m); 系统具体参数如表1所示。
 | 图2 成像光谱仪 (a): 光谱仪结构示意图; (b): 光谱仪光学设计示意图Fig.2 Imaging spectrometer (a): Schematic diagram of spectrometer structure; (b): Schematic diagram of optical design of spectrometer |
| 表1 IDOAS系统参数 Table 1 IDOAS system parameters |
本系统的光学导入系统紫外镜头及多芯光纤束组成。 光纤束由共49根无源石英光纤芯构成, 光纤束前端与紫外镜头耦合, 采用7× 7矩形排布, 光纤束后端与光谱仪耦合, 采用顺序排布; 两端光纤芯束一一对应。 由于多芯光纤束采用上述排布方式, 系统视场角为6° (水平)× 6° (垂直), 单个像元空间分辨率为0.86° × 0.86° 。 此种排布方式使得本仪器能够采用“ 拍照式” 成像方式工作, 能够捕获快速移动点源气体污染物信息, 同时具有高时间分辨率。 结合摄像头记录观测区域的空间图像信息, 可以获得准确的痕量气体二维空间分布信息。
根据观测目标的具体需求, 结合摄像头的画面, 控制高精度云台旋转确保水平视场能够覆盖整个烟羽扩散的区域。 紫外镜头与摄像头均安装于二维旋转云台上, 两镜头光轴相距9.5 cm。 云台通过RS485与计算机进行通信, 摄像头通过网线与计算机通信, 用以获取观测区域空间图像信息。 为了获取观测区域内更加精确的烟羽空间二维分布信息, 需要对两镜头视场进行匹配。 实际观测时, 摄像头的视场为7° × 8° , 紫外镜头视场角为6° × 6° 。 调整摄像头的垂直视场角, 确保摄像头的垂直视场完全包含紫外镜头的垂直视场, 保证摄像头在观测时能够获得紫外镜头视场所对应的完整的空间图像信息。 S为能够确保摄像头视场完全包含紫外镜头视场的最小距离。
因此, 在实际观测时, 仪器架设位置距离污染源最短距离为11 m, 根据实际测量时仪器的架设位置, 对获取的观测区域图像信息进行适当的裁剪, 使得摄像头视场与紫外镜头视场完全匹配。 匹配示意图如图3所示。
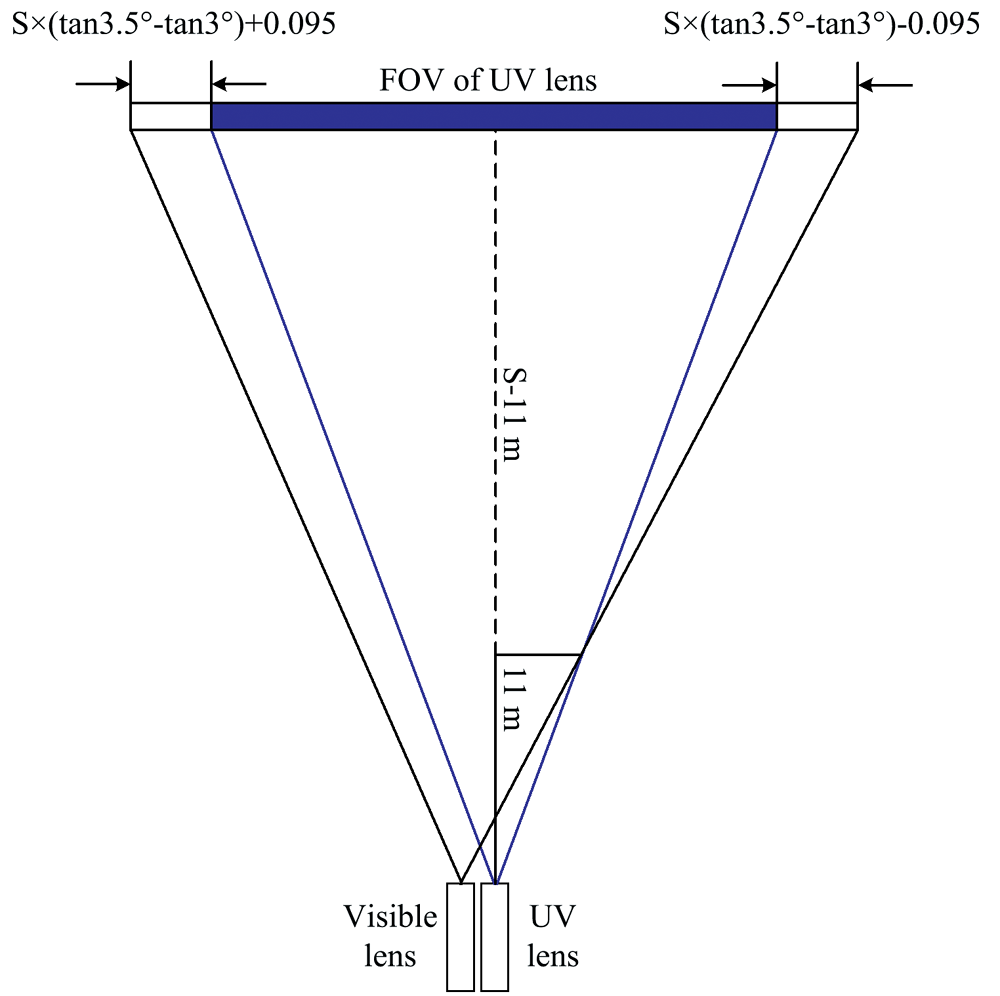 | 图3 紫外、 摄像头视场匹配示意图Fig.3 Schematic diagram of UV and camera field of view matching |
气体浓度反演基于差分吸收光谱技术(DOAS), 其理论基础是朗伯-比尔定律(Lambert-Beer's law), 表达式为
式(2)中, I(λ )为测量光谱, I'0(λ )为参考光谱, σ j为痕量气体的吸收截面;
在对烟羽污染气体浓度结果进行反演的过程中, 选择相对“ 洁净” 区域的正午天顶太阳光散射光谱作为参考谱, 用于扣除反演过程中夫琅禾费结构对反演结果造成的影响。 利用QDOAS软件对获得的光谱数据进行反演, SO2拟合波长区间选择308~320 nm, 参与反演的气体包括SO2、 O3、 O4, 将Ring效应视作一种吸收结构参与反演, 采用五阶多项式进行拟合, 最终获得多组SO2斜柱浓度结果。 图4为光谱拟合示意图, 其中黑色实线为测量光谱图, 红色实线为拟合曲线。 反演得到SO2斜柱浓度为1.413 5× 1017 molecule· cm-2, 反演误差为5.414 9× 1015 molecule· cm-2。
 | 图4 SO2拟合结果 (a): SO2光谱拟合结果; (b): SO2斜柱浓度拟合残差Fig.4 Fitting results of SO2 (a): Fitting results of SO2 spectrum; (b): Fitting residual of SO2 slanted column concentration |
仪器搭建完成后, 为了检测成像差分吸收光谱仪测量结果的准确性, 系统首先进行了标气实验。 样气池为18 cm× 18 cm× 18 cm的透明正方体, 进气口接入流量计以稳定气体流速, 每组样气通气5 min后开始测量。 每次通样气之前, 先通入氮气清洗吸收池中以减少干扰。
选取实验当天正午的天顶太阳散射光光谱作为参考谱。 通过理想气体方程和几何换算后, 可得到气体的体积浓度。 地基光谱仪样气实验测试了2种不同浓度的SO2样气, 光谱仪样气测试结果见表2, 成像结果如图5所示。 结果表明测量值与标准值的相对误差小于10%。
| 表2 样气测试结果 Table 2 Test results of sample gas |
 | 图5 样气实验成像结果Fig.5 Imaging results of sample gas experiments |
2022年9月19日, 使用地基IDOAS系统对铜陵发电厂发电机组烟囱进行了地面观测实验。 下午15:00左右开始观测实验, 实验过程中, 当地风速为5~7 m· s-1。 仪器架设在烟囱西南侧1.4 km处, 以便能够垂直扫描烟羽, 仪器架设如图6所示。 使用两台仪器分别对发电厂烟囱排烟口排放的烟羽的空间二维分布情况进行了测量。 用于对比验证的地基IDOAS仪器通过推扫方式获取观测区域内的光谱信息, 参数见表1所示。 观测时设置推扫步进角度为0.5° , 仪器垂直分辨率为0.625° 。
 | 图6 观测示意图 (a): 观测点位置示意图; (b): 实验现场仪器实物图Fig.6 Observation schematic diagram (a): Schematic diagram of the position of the observation point; (b): The experimental site and instrument |
对两台仪器获得的光谱信息进行反演后, 结合获得的观测区域图像信息, 得到了电厂烟羽排放的二维空间分布情况, 成像比对结果如图7所示。
 | 图7 烟羽排放SO2二维分布成像结果对比 (a): 仪器结果; (b): 验证仪器的结果Fig.7 Comparison of imaging results of plume emission SO2 two-dimensional distribution (a): Instrument results; (b): Results of the instrument used for verification |
根据观测距离, 可计算出成像结果的空间分辨率约为21 m× 21 m。 测量时烟囱排放烟羽量较大, 烟囱口上方烟羽形状清晰, 烟羽中SO2浓度较高。 通过成像结果能够得到清晰的烟羽扩散方向及污染物高值区域。 SO2的斜柱浓度最高值可达1.363 8× 1017 molecule· cm-2。
对两台IDOAS同步观测结果进行了对比分析, 根据视场和空间匹配, 对相同空间位置的结果进行了对比, 在进行网格化处理后, 对结果进行了相关性分析, 相关性系数为0.935(图8, 横坐标为本仪器, 纵坐标为验证仪器), 证明了“ 拍照式” IDOAS获取污染气体空间分布信息的准确性及观测方式的可行性。
 | 图8 两台仪器反演结果相关性分析Fig.8 Correlation analysis of SO2 inversion results of two instruments |
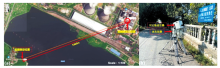
2022年12月14日在铜陵市郊区官场码头(30° 49'64″N, 117° 42'34.4″E)使用地基IDOAS系统对长江江面船舶尾气排放进行了地面观测实验。 观测区域位于铜陵长江大桥南侧3.3 km处长江水域, 仪器架设在长江西岸, 观测方向为正东。 观测点北侧为铜陵港, 码头数量多, 水域船只密度较大。 观测当天天气晴朗无云, 偏西风1~2级, 风速1.5~3.3 m· s-1, 具体观测位置如图9所示。 观测点距航道1约137 m, 距航道2约780 m, 船舶类型主要为散货船。 测量时间为12:00— 14:10, 观测的时间分辨率为5 s。
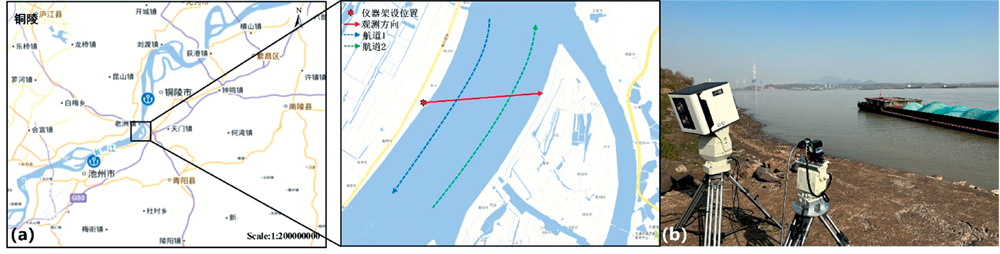 | 图9 观测示意图Fig.9 Observation diagram |
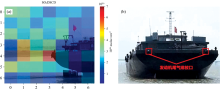
将仪器紫外镜头记录的光谱信息与摄像头采集的图像信息结合后, 可以得到仪器观测区域内船舶排放烟羽中SO2的空间分布信息。 为避免污染物吸收对参考光谱的干扰, 将正午的天顶太阳散射光光谱作为参考光谱对测量数据进行反演。 图10(a)为观测区域内有船经过时船舶尾气中SO2的空间二维分布成像结果, 观测区域内的SO2最高值为6.120 9× 1016 molecule· cm-2, 典型船只的污染物排放位置如图10(b)所示。
 | 图10 船舶尾气二维分布成像结果及尾气排放位置示意图 (a): 有船经过时成像结果; (b): 典型船只发动机尾气排放位置示意Fig.10 Imaging results of two-dimensional distribution of ship tail gas and schematic diagram of tail gas emission position (a): Imaging results when a ship is passing by (b) indication of engine exhaust position of a typical ship |
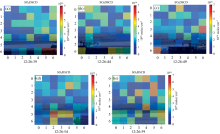
分别选取了在第一及第二航道航行的典型船只, 并结合摄像头采集的相应图像信息, 得到船舶排放尾气中SO2的空间二维分布结果, 分别如图11、 图12及图13所示, 成像的时间分辨率为5 s, 在默认航速(≈ 2.877 8 m· s-1)下, 航道二典型船只经过整个观测区域大约需要30 s, 航道一典型船只经过整个观测区大约需要5 s。 其中图11显示了两艘船只行驶在观测区域中的情况, 位于图11(a)中最右侧的船只在尾气排放位置观测到明显的高值区。 5 s后最右侧船只完全离开观测区域, 12:26:49另一艘典型船只的主发动机尾气排放口进入观测区域, 在随后的10 s内, 随着船只的行驶, 在图11(c)、 (d)中均能够看到船尾排放口位置的空间像元所对应的SO2浓度明显升高, 最高值达到了5.573 2× 1016 molecule· cm-2, 图11(e)中可以观察到, 在船舶离开观测区域后, 区域内的污染物向左上方扩散稀释。 图12中显示的航道二典型船只展现了与图11中相同的尾气污染物空间变化规律, 能够看到船尾排放口位置的空间像元所对应的SO2浓度始终为高值, 过程中的最高值为7.158 4× 1016 molecule· cm-2。 图13中展示的航道一典型船只也展现了相同的浓度变化规律, 船舶排放的SO2浓度最高值为6.226 8× 1016 molecule· cm-2, 并且能够观测到较为清晰的羽流扩散情况。
 | 图11 航道一内两艘船只尾气成像结果 (a): 12:26:39; (b): 12:26:44; (c): 12:26:49; (d): 12:26:54; (e): 12:26:59Fig.11 Tail gas imaging results of two typical ships exhaust in first waterway (a): 12:26:39; (b): 12:26:44; (c): 12:26:49; (d): 12:26:54; (e): 12:26:59 |
 | 图12 航道二内典型船只尾气成像结果 (a): 12:36:04; (b): 12:36:09; (c): 12:36:14; (d): 12:36:20; (e)12:36:25; (f): 12:36:30Fig.12 Tail gas imaging results of typical ship exhaust in the second waterway (a): 12:36:04; (b): 12:36:09; (c): 12:36:14; (d): 12:36:20; (e)12:36:25; (f): 12:36:30 |
 | 图13 航道一内典型船只尾气成像结果 (a): 13:03:27; (b): 13:03:32Fig.13 Tail gas imaging results of typical ship exhaust in first waterway (a): 13:03:27; (b): 13:03:32 |
研究了一种基于地基IDOAS技术的遥测系统及使用该系统观测船舶大气污染物空间分布信息的应用方法, 并介绍了地基IDOAS系统的基本结构和系统参数, 该系统可对烟羽污染物分布情况进行“ 拍照” 式快速成像, 成像结果的时间分辨率为5 s。 使用该仪器对铜陵市发电厂烟囱排放烟羽中SO2空间分布情况及长江船舶尾气中SO2的分布情况进行了观测。 仪器遥测结果具有较高的时间分辨率, 同时将摄像头采集的观测区域图像信息与污染物浓度信息进行匹配, 最终获得准确的污染物浓度在观测区域的二维分布情况。 根据仪器成像结果可以研究观测区域内单个船只在观测区域污染物浓度的连续变化特征; 由于系统中加入摄像头, 使得系统能够有效的捕获单个船舶的尾气排放情况, 从而将采集到高浓度污染排放追溯到具体船只。 本研究为船舶等快速移动污染源的监测提供了有效的实时监测手段。 下一步计划结合AIS(automatic identification system)系统, 计算排放高浓度烟羽的特定船只用油的油品含硫量, 为相关执法部门在船舶排放控制区识别燃油硫含量超标船只提供数据支持。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|