






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
敦煌戈壁地表反射率光谱的旋翼无人机测量及定标评估
[张勇1, 2, 3  , 徐寒列
, 徐寒列1, 2 , 张立军1, 2 , 李元1, 2 , 孙凌1, 2 , 覃丹宇1, 2 , 戎志国1, 2 , 胡秀清1, 2 , 陆其峰4 , 卢乃锰1, 2 ]
, 徐寒列|
|


作者简介: 张 勇, 1977年生, 中国气象局中国遥感卫星辐射测量和定标重点开放实验室研究员 e-mail: zhangyong@cma.gov.cn
利用敦煌中国遥感卫星辐射校正场的星地同步观测试验, 实现对我国在轨气象、 海洋、 陆地资源、 环境减灾、 测绘地震、 高分、 军事等系列卫星光学成像载荷太阳反射波段的绝对辐射定标, 是目前的重要手段之一。 然而, 中国遥感卫星辐射校正场传统的地表反射率光谱星地同步测量方法是基于汽车跑场观测, 不仅耗费较大的人力物力、 容易造成场地破坏, 而且获取的测量数据缺乏区域代表性。 鉴于此, 自2016年起, 在敦煌星地同步观测试验中以旋翼无人机低空同步测量为主, 跑场测量为辅, 完成从航线设计、 航高选择、 仪器参数配置、 采样策略、 航空数据处理的全链路摸底测试。 多次飞行试验表明, 采用多旋翼无人机低空飞行来代替汽车跑场同步测量, 不仅提高了地表反射特性测量的空间一致性和代表性, 还提高了地表反射率光谱的测量效率, 也对宝贵的中国遥感卫星辐射校正场敦煌戈壁场区地表进行了有效保护, 极大的节约了人力物力成本。 通过传统跑场测量和航飞测量的地表反射率光谱数据对比分析, 发现多次测量数据的均值一致性较好, 并且航飞测量的数据标准差更小。 利用TERRA MODIS的同步观测来对无人机测量数据开展辐射定标评估, 结果表明航飞数据的相对偏差均在5%以内, 可以代替跑场数据完成定标, 精度满足要求。 随着无人机性能的进一步优化和提高, 在不久的将来必将得到更加广泛和深入的应用, 在外场定标试验领域也将发挥更大更重要的作用。
, XU Han-lieThe satellite-ground synchronous observation experiment at China Radiometric Calibration Sites (CRCS) Dunhuang is one of the primary methods for achieving absolute radiometric calibration of China's meteorology, oceanography, land resource, environmental disaster monitoring, and military series satellite optical imaging payloads solar reflection bands. However, the traditional method of surface reflectance spectral satellite-ground synchronous measurement at CRCS Dunhuang Site is based on vehicle observation, which not only consumes significant resources and can damage the site but results in measurement data lacking regional representativeness. To address this issue, the 2016 satellite-ground synchronous observation experiment at CRCS Dunhuang primarily utilized rotor drones for low-altitude synchronous measurements supplemented by vehicle observations. The experiment covered all process aspects, including route design, altitude selection, instrument parameter configuration, sampling strategy, and aviation data processing. Multiple flight tests have shown that using rotor drones for low-altitude measurements, instead of vehicle-based measurements, improves the spatial consistency and representativeness of ground reflectance characteristics. Using drone-based measurements also increases the efficiency of assessing ground reflectance. It effectively protects the precious Gobi surface of CRCS Dunhuang, resulting in significant savings of resources. Comparisons of surface reflectance data obtained through aerial and vehicle-based measurements indicate that the mean values of multiple surface reflectance measurements are relatively close, However, the standard deviation of the aerial measurements is smaller. Evaluating the radiometric calibration of reflectance data obtained by drones using synchronous measurements from the Terra MODIS sensor indicates that the relative deviation of the drone data is within 5%. Drone-based measurements can replace vehicle-based field measurements for calibration purposes, and the accuracy meets requirements. With further optimization and improvement in drone performance, drones are anticipated to have more extensive and intensive applications in satellite-ground synchronous calibration testing, playing a more significant and important role in the future.
在轨遥感器的绝对辐射定标是遥感器辐射特性变化监测的主要手段, 也是遥感定量化应用的基本需求。 利用中国遥感卫星辐射校正场的星地同步观测试验, 实现对我国在轨气象、 海洋、 陆地资源、 环境减灾、 测绘地震、 高分、 军事等系列卫星光学成像载荷太阳反射波段的绝对辐射定标, 是目前的重要手段之一。 获取卫星过顶辐射校正场时高精度且具有代表性的地表反射率光谱同步观测数据是该方法的核心环节[1]。
场地定标是指在地面上选取均匀区域作为辐射定标场, 当卫星过境时, 通过地面或飞机上同步测量, 实现在轨卫星遥感器的辐射定标。 场地定标方法包括反射率基法、 辐亮度法和辐照度基法[2]。 反射率基法辐射定标是在卫星传感器过境时, 在辐射校正场同步进行场地反射率光谱测量、 大气消光测量、 常规气象观测, 并用GNSS设备记录测量过程中的位置信息。 对以上观测数据进行处理, 获得场地反射率光谱、 水汽含量、 气溶胶光学厚度等辐射定标过程中需要的参数。 将所得参数输入相应的辐射传输模型, 计算得到卫星传感器入瞳处各光谱波段的表观辐亮度或表观反射率, 其中针对不同传感器还需要对光谱响应函数进行卷积处理。 同时, 还需对同一时刻卫星图像进行处理, 根据定位信息提取并计算测量场地的平均计数值。 最后将计算得到的表观辐亮度或表观反射率与卫星传感器图像平均计数值进行拟合, 得到卫星各波段的在轨场地绝对辐射定标系数[3, 4]。
我国自20世纪90年代启动“ 中国遥感卫星辐射校正场” 项目的科研和建设工作, 开启了我国遥感卫星定量化技术系统性攻关。 由八部委联合兴建并至今维持运行的中国遥感卫星辐射校正场是我国依靠自主技术力量建立, 旨在为国产多系列遥感卫星提供辐射定标基础技术支撑的大型基础设施, 对确保遥感卫星定量化应用具有重要作用。 中国遥感卫星辐射校正技术系统以辐射校正场为基础, 围绕国产遥感卫星发展和定量化应用需求, 在辐射校正技术指标体系、 辐射校正理论与方法、 辐射标准与辐射测量技术、 辐射校正观测与系统集成技术等方面开展研究, 提出了完整的遥感卫星辐射校正技术指标体系, 建立了由敦煌戈壁、 青海湖水体、 普洱雨林组成的全球第一个多尺度、 全谱段辐射校正场。 经过二十多年的运行, 中国遥感卫星辐射校正系统针对我国各系列遥感卫星在轨辐射校正需求, 开展了50多次大规模在轨遥感卫星辐射校正试验, 完成了30多颗国产卫星和10余颗国外卫星的辐射校正观测。 中国遥感卫星辐射校正系统极大地推动了我国遥感卫星定量化应用水平的提高, 确保了遥感卫星效益的发挥, 使我国在这一领域进入国际先进行列。
无人机遥感技术主要应用于各种突发性灾害监测和环境动态监测。 无人机遥感(UAVRS)技术作为航空遥感手段, 具有续航时间较长、 影像实时传输、 高危地区探测、 成本低、 高分辨率、 机动灵活等优点, 是卫星遥感与有人机航空遥感的有力补充, 在国内外已得到广泛应用[5, 6]。 近年来, 无人机遥感技术已经发展成熟, 特别是旋翼无人机, 已经逐步在多个部门得到应用, 呈现蓬勃发展的态势[7]。 利用无人机测量系统对敦煌辐射校正场进行地表方向特性测量, 并开展对Landsat-8/OLR第1~6波段的卫星观测表观辐亮度值与模型计算值相对偏差均小于5%, 标准差小于2%[8]。 Wierzbicki等[9]将BRDF模型应用于航拍影像的辐射校正中, 用以消除低海拔影像处理中的大气及照明的几何的影响, 正射影像对间的RMSE可保持在10%以下。 Pan等[10]研发了UAV的BRDF测量系统, 并利用该系统测量了敦煌定标场区的BRDF, 应用于CBERS-04 WFI定标数据的订正, 极大的提高了定标精度, 特别是在大观测角度的情况下。 陶炳成等[11]在此基础上改进了BRDF测量装置、 观测方案和流程, 并利用无人机和云台组合, 搭载光谱仪和跟拍相机, 基于Ross-Li模型推算了敦煌定标场区BRDF模型参数, 并与MODIS的MCD43C1和MOD/MYD09产品进行了对比分析, 各波段相对偏差在5%以内。
为了有效保护场地、 提高地表反射特性测量的空间一致性和代表性、 节约人力物力成本等, 在中国遥感卫星辐射校正场敦煌场区星地同步试验中研发了无人机地表反射率光谱低空测量技术, 并用以代替传统的汽车跑场测量。
中国遥感卫星辐射校正场(China radiometric calibration sites, CRCS)敦煌场区位于甘肃省敦煌市以西距市区约35 km的戈壁上, 向南70~80 km东西走向的阿尔金山脉是党河的发源地, 其地理坐标为: N40° 00'—40° 20', E94° 00'—94° 30', 东西长约60 km, 南北宽约40 km。 该场地位于党河冲积扇上, 从场地边界向南10 km即为鸣沙山和党河水库。 其中均匀区域大小为40 km× 30 km, 均匀区的中心地理位置为N40° 05'27.75″, E94° 23'39″, 该场地北高南低, 北面海拔高度为1 250 m, 南面海拔高度为1 105 m[12]。 冲积扇表面主要由砾石、 沙子和尘土组成, 如图1所示。 该场地的地表为灰色, 这主要是由于对应不同岩石成份的亮、 暗物质相混合造成的。 由于该地区的蒸发量大, 长时间受此影响, 地表呈胶结层或块状胶结层结构, 胶结层的厚度约2~5 cm。 地表被砾石覆盖, 从而有助于防止风携带戈壁沙漠土壤的输运。 在胶结层下面, 沙子的含量占有很大的比例[13]。
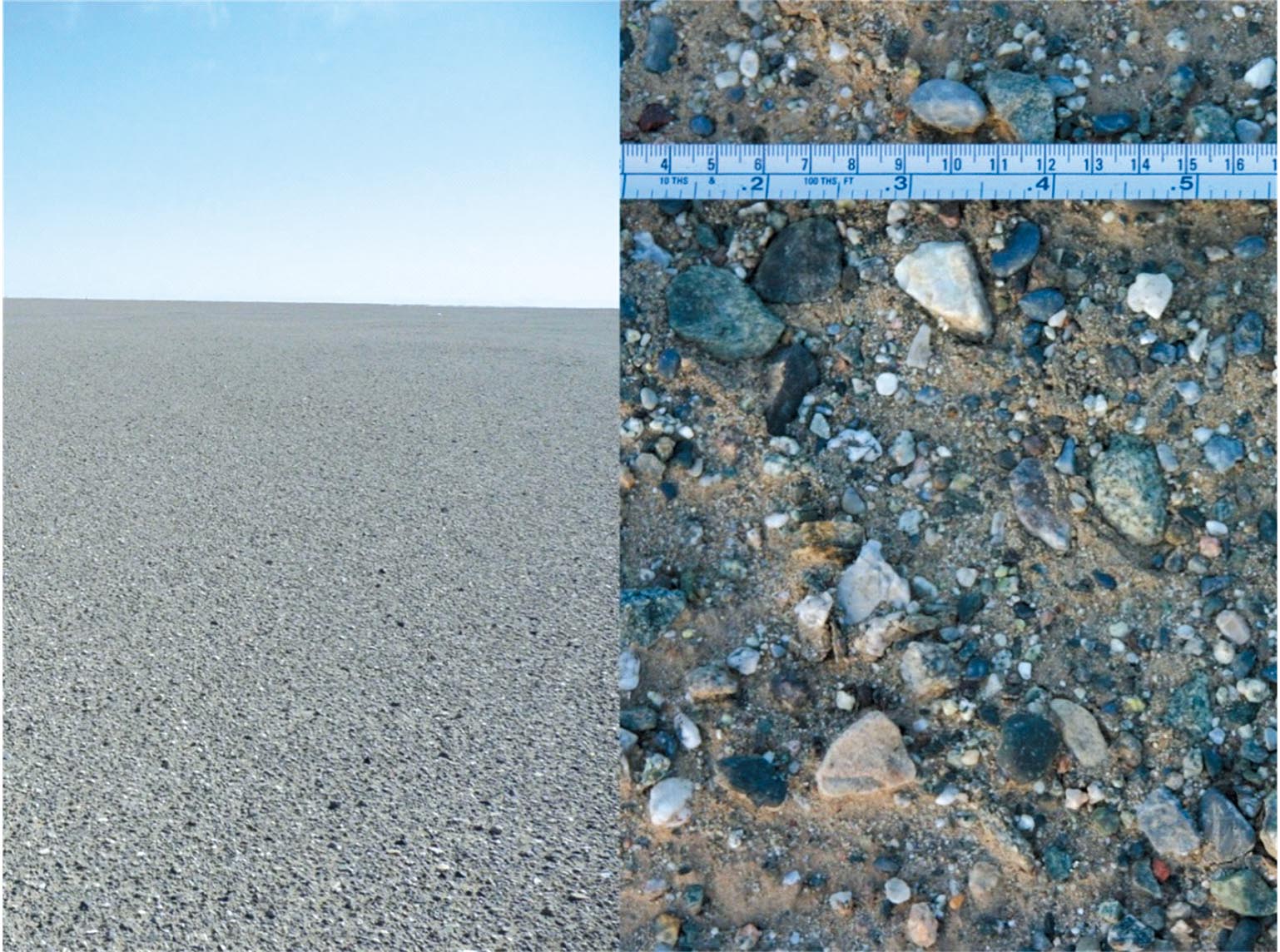 | 图1 敦煌场地的地表状况Fig.1 The surface condition of the CRCS Dunhuang site |
敦煌辐射校正场用于地表反射率光谱星地同步测量区域面积为10 km× 10 km。 传统的地表反射率光谱测量方法基于汽车跑场观测(图2中红色方块为传统汽车跑场的11个采样点, 红色虚线为跑场线路); 这种方法不仅耗费较大的人力物力、 容易造成场地表面破坏; 而且由于人为操作光纤头进行测量, 且距离地物目标1.5 m以内, 易造成测量目标缺乏区域代表性; 并且完成场地全部同步点观测需要2 h左右, 测量期间的太阳天顶角变化会引入额外的误差; 加之车辆在戈壁滩上长时间高速行驶, 对人员和仪器设备造成危险和损害。
为进一步提高太阳反射波段场地定标精度, 实现最大程度的场地保护, 随着无人机技术发展与成本下降, 利用旋翼无人机精准GPS定位和光谱云台增稳性设计, 通过搭载高光谱分辨率光谱仪开展星-机-地同步观测的航空辐射定标试验方案应运而生。
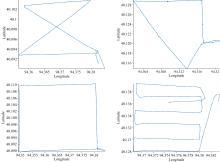
2016年在国家卫星气象中心牵头的中国遥感卫星辐射校正场——敦煌戈壁场区的星地同步观测试验中首次引入旋翼无人机开展大面积低空反射率光谱测量, 采用参考板同时测量法和顺序测量法, 针对地表反射率光谱的观测需求而设计了不同的航线。 为了分析航飞测量和悬停测量以及不同航高和地面视场对测量结果的影响, 使无人机在30~300 m不同高度进行悬停测量。 为了获取尽量多的试验数据, 以及测试无人机性能, 在有卫星过境和天气条件符合试验要求时进行星机地同步飞行, 同时也进行传统汽车跑场同步测量; 无卫星过境或天气不佳的情况下, 则进行无人机调试和飞行摸底试验。 共完成了16个架次的无人机飞行, 其中同步观测飞行9架次(飞行轨迹如图2中蓝色点线所示), 传统汽车跑场同步8次, 为无人机同步观测积累了大量的实际经验和第一手飞行对比数据, 分别针对FY-3B/C、 FY-2E/G、 TERRA、 AQUA、 SNPP、 METOP-A等卫星开展了星-机-地同步观测。
 | 图2 敦煌辐射校正场地表反射率采集区域Fig.2 CRCS Dunhuang site surface reflectance collection area |
无人机选择的是北方天途航空技术发展有限公司生产的TTA八旋翼无人机, 其主要特点采用碳纤维及航空铝材料、 材质轻强; 整机可折叠、 方便运输、 快拆结构; 易操作、 维护简单; 安全性高、 配备降落伞可自动开伞、 紧急情况可一键返航、 自动悬停, 抗风能力七级以上; 友好的黑匣子功能, 飞行数据自动记录; 飞行器可按预设航线自主完成飞行任务; 可在地面站软件实时监测当前电流值和电池消耗量, 电量报警提示等。 主要指标如表1所示。
| 表1 TTA八旋翼无人机主要技术指标 Table 1 Main specifications of TTA eight-rotor drone |
根据无人机载重指标的要求, 选择SVC公司的SVC HR1024i光谱仪作为航测光谱仪。 SVC HR1024i光谱仪的主要指标见表2。
| 表2 SVC HR1024i光谱仪的主要性能指标 Table 2 Main specifications of SVC HR1024i spectrometer |
由中国科学院安徽光学精密机械研究所研制的标准参考板使用聚四氟乙烯压制而成, 几何尺寸为400 mm× 400 mm, 反射率99%。
由于是首次使用无人机代替跑场进行观测, 为了准确掌握无人机的性能和续航能力, 试验中首先利用无人机配重飞行模式对无人机的续航能力和稳定性等进行了全面测试; 在此基础上, 针对地面反射率光谱观测需求, 设计了不同飞行航线, 包括“ 8” 字型、 三角形、 四边形和扫描航线等多种形式, 开展飞行测量, 如图3所示。 与此同时, 为了分析走航测量、 不同航高和地面视场对测量结果造成的影响, 还采用悬停观测的模式, 分别使无人机在30、 50、 80、 100、 150、 200、 250和300 m的不同高度悬停, 利用光谱仪对地面进行观测, 不同高度SVC光谱仪对应地面采样区直径如表3所示; 在标准板和目标的测量方式上, 同时试验了飞行前后分别测量参考板和一台仪器飞行测量另一台仪器凝视参考板两种模式。
 | 图3 GPS飞行航线图Fig.3 GPS recorded flight path |
| 表3 不同飞行高度对应地面分辨率 Table 3 Ground resolutions at different flight altitudes |
实际星地同步飞行测量日期为2016年9月9日—12日, 4天共9架次。 航飞位置分别位于地面同步跑场的1号点附近、 2号点附近、 6—7号点之间, 如图2所示。 测量方案分为: 悬停测量(1次)、 飞行测量(2次)、 飞行+悬停测量(6次)。 航飞测量具体参数见表4。
| 表4 无人机SVC飞行架次信息列表 Table 4 Flight information list of UAV SVC measurements |
在飞机起飞前和降落后, 地面各测量3次标准参考板, 飞行过程仅进行目标观测, 每隔10s测量一次数据, SVC记录为辐亮度和以第一次参考板数据计算得到的地表反射比。 假设飞行过程(30 min内)参考板辐亮度为线性变化。 图4为无人机搭载SVC的地表反射率测量的修正方案。
 | 图4 无人机搭载SVC地表反射率处理流程Fig.4 Processing flow of measured surface reflectance by UAV equipped with SVC |
根据测量的标准参考板光谱辐亮度及其自身方向反射比因子计算反射辐亮度。
式(1)中, Ri(θ s, φ s, 0° , λ )为波长λ 处, 太阳入射方向(θ s, φ s), 出射方向为0° 的标准参考板反射辐亮度; Rs(θ s, φ s, 0° , λ )为从天顶方向观测的波长λ 处辐亮度; BRFs(θ s, φ s, 0° , λ )为标准参考板在太阳入射方向(θ s, φ s), 出射方向为0° 的方向反射比因子。
由于每个架次的飞行测量时间不大于30 min, 因此, 可以假设飞行过程中太阳天顶角的变化是线性的。 根据经过BRF修正的起飞前和降落后的参考板辐亮度, 对同一个架次中每个飞行测量时刻进行参考板辐亮度内插, 从而得到修正后的地表反射比结果。 图5—图8分别为修正前和修正后的飞行测量地表反射率。
 | 图5 2016年9月9日第二次飞行无人机搭载SVC的地表反射比结果 (a): 原始结果; (b): 修正后结果; (c): 平均反射率; (d): 标准差; 红色为原始值, 蓝色为修正后的值Fig.5 The surface reflectance measured by the second flight of UAVs equipped with SVC on September 9, 2016 (a): The original values; (b): The corrected values; (c): The average reflectance; (d): The standard deviation; Red is the original value, and blue is the corrected value |
 | 图6 2016年9月10日第一次飞行无人机搭载SVC的地表反射比结果 (a): 原始结果; (b): 修正后结果; (c): 平均反射率, 红色为原始值, 蓝色为修正后的值; (d): 标准差, 红色为原始值, 蓝色为修正后的值Fig.6 The surface reflectance results of the first flight of UAVs equipped with SVC on September 10, 2016 (a): The original result; (b): The corrected result; (c): The average reflectance; (d): The standard deviation; (c) and (d), red is the original value, and blue is the corrected value |
 | 图7 2016年9月11日第三次飞行无人机搭载SVC的地表反射比结果 (a): 原始结果; (b): 修正后结果; (c): 平均反射率, 红色为原始值, 蓝色为修正后的值; (d): 标准差, 红色为原始值, 蓝色为修正后的值Fig.7 The surface reflectance results of the third flight of UAVs equipped with SVC on September 11, 2016 (a): The original result; (b): The corrected result; (c): The average reflectance; (d): The standard deviation; (c) and (d), red is the original value, and blue is the corrected value |
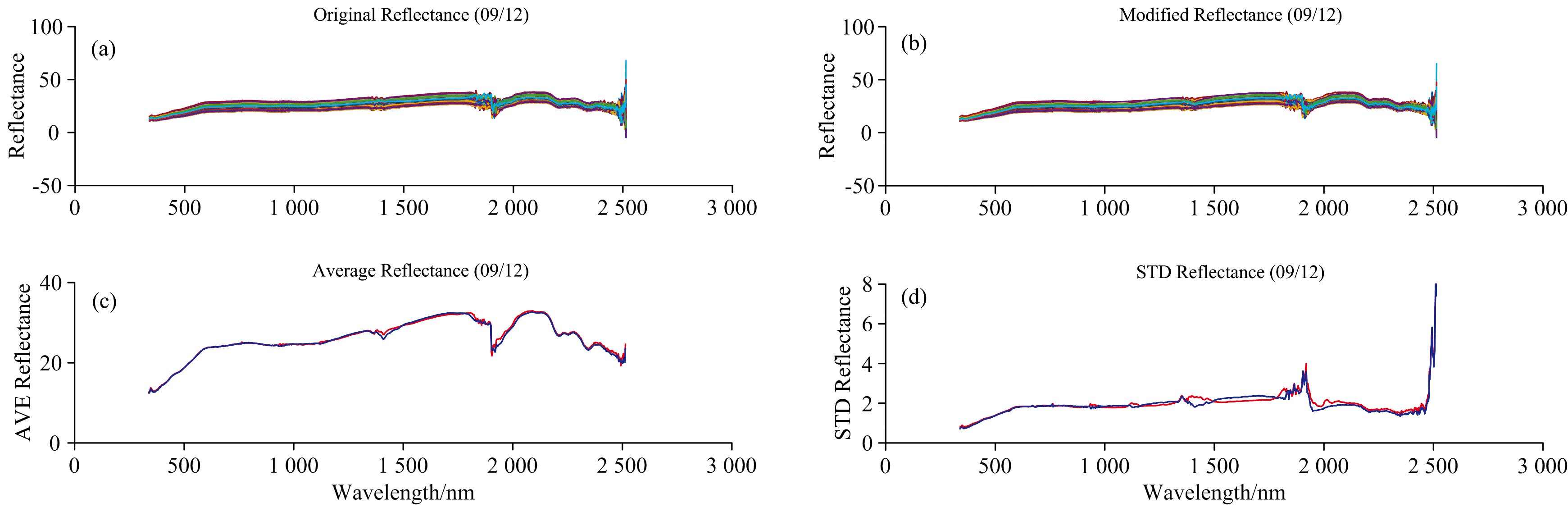 | 图8 2016年9月12日第一次飞行无人机搭载SVC的地表反射比结果 (a): 原始结果; (b): 修正后结果; (c): 平均反射率, 红色为原始值, 蓝色为修正后的值; (d): 标准差, 红色为原始值, 蓝色为修正后的值Fig.8 The surface reflectance results of the first flight of UAVs equipped with SVC on September 12, 2016 (a): The original result; (b): The corrected result; (c): The average reflectance; (d): The standard deviation; (c) and (d), red is the original value, and blue is the corrected value |
通过对比修正前和修正后的地表反射率的均值和标准差[图5—图8的(c)和(d)]之间的变化可以发现, 对于上午的测量结果[图6(c)和图8(c)], 修正后反射比平均值降低, 下午的测量结果[图5(c)和图7(c)], 修正后反射比平均值升高。 这主要是因为早上太阳天顶角逐渐减小, 原始观测是利用起飞前的参考板观测计算反射率, 计算结果势必随着天顶角的减小而增大, 利用降落后的参考板观测线性内插修正后会订正由于天顶角变化引入的误差; 而对于下午观测, 太阳天顶角逐渐增大, 会引起相反的误差规律, 也正说明修正的结果是符合物理意义的。 此外通过图5—图8的对比可以发现, 悬停测量的地表反射比变化非常小[图5(a)], 飞行过程中的测量会引入较大的不确定性[图6(a)], 而飞行+悬停测量既可以获得较为一致的测量结果, 又可以获取较大区域的观测数据[图7(a)和图8(a)]。 第三, 通过图5—图8的(d)可以看出, 经过BRF修正的观测数据相较于原始数据STD均有所降低, 说明修正后的观测数据具有更好的一致性。
在敦煌辐射校正场开展无人机地表反射率的低空测量, 其主要目的是代替传统的人工汽车跑场测量模式, 从而可以有效的保护场地, 大幅节约人力物力, 有效降低外场试验地表反射率测量的工作强度, 保证人员和仪器设备安全。 因此, 必须对无人机SVC与跑场ASD观测结果进行对比分析。
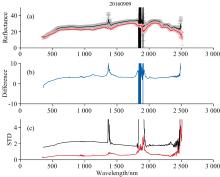
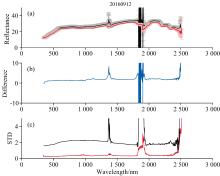
根据卫星同步时间, 对无人机低空测量架次和跑场测量进行匹配分析, 共获取了4次无人机SVC与跑场ASD的同步观测时空匹配对, 对这四次观测进行比对分析, 如图9—图12所示(其中子图(a)和子图(c)中黑体线条代表ASD跑场观测, 红色线条代表无人机SVC观测, 子图(b)为无人机SVC与跑场ASD的反射率均值之差; (1 380± 20)和(1 870± 40) nm为水汽的两个强吸收带)。
 | 图9 2016年9月9日无人机SVC与跑场ASD观测结果比对 (a): 测量获得的地表反射率; (b): 无人机SVC与跑场ASD的反射率均值的差值; (c): 多次测量的标准差Fig.9 Surface reflectance comparisons between SVC and ASD measurements on Sep. 9th, 2016 (a): The surface reflectances measured by ASD (black) and SVC (red); (b): Difference in mean reflectances measured by ASD and SVC; (c): The standard deviation (STD) of ASD (black) and SVC (red) |
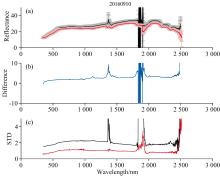
 | 图10 2016年9月10日无人机SVC与跑场ASD观测结果比对 (a): 测量获得的地表反射率; (b): 无人机SVC与跑场ASD的反射率均值的差值; (c): 多次测量的标准差Fig.10 Surface reflectance comparisons between SVC and ASD measurements on Sep. 10th, 2016 (a): The surface reflectance measured by ASD (black) and SVC (red); (b): Difference in mean reflectances measured by ASD and SVC; (c): The standard deviation (STD) of ASD (black) and SVC (red) |
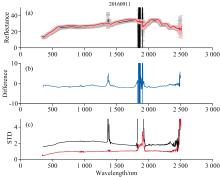
 | 图11 2016年9月11日无人机SVC与跑场ASD观测结果比对 (a): 测量获得的地表反射率; (b): 无人机SVC与跑场ASD的反射率均值的差值; (c): 多次测量的标准差Fig.11 Surface reflectance comparisons between SVC and ASD measurements on Sep. 11th, 2016 (a): The surface reflectance measured by ASD (black) and SVC (red); (b): Difference in mean reflectances measured by ASD and SVC; (c): The standard deviation (STD) of ASD (black) and SVC (red) |
 | 图12 2016年9月12日无人机SVC与跑场ASD观测结果比对 (a): 测量获得的地表反射率; (b): 无人机SVC与跑场ASD的反射率均值的差值; (c): 多次测量的标准差Fig.12 Surface reflectance comparisons between SVC and ASD measurements on Sep. 12th, 2016 (a): The surface reflectance measured by ASD (black) and SVC (red); (b): Difference in mean reflectances measured by ASD and SVC; (c): The standard deviation (STD) of ASD (black) and SVC (red) |
从图中可以看出4次同步观测无人机SVC与跑场ASD均值均具有很好的一致性(如图9—图12的(b)所示), 偏差绝对值在400~2 500 nm谱段内(除水汽强吸收带外)均显著小于5%。 但是, 无人机SVC多次测量的标准差明显小于ASD地面跑场观测的标准差(如图9—图12的(c)所示)。 因此, 无人机SVC观测的结果可以代替汽车跑场ASD观测的结果, 进行遥感器在轨场地辐射定标, 并且无人机SVC多次测量结果具有更好的稳定性和代表性。
利用TERRA MODIS的同步测量来对无人机测量数据开展辐射定标评估。 本次试验与TERRA MODIS有2次星地同步观测。 以MODIS为辐射基准, 利用同步数据计算MODIS各波段的大气顶辐亮度, 并与MODIS实际观测值进行比较, 用以评估定标正演模拟的精度。
从NASA获取了同步日版本6的MODIS 1级(MOD1KM)和定位(MOD03)产品。 表5列出了同步日的辅助参数信息。
| 表5 2016年Terra MODIS场地同步参数信息 Table 5 Terra MODIS field synchronization experimentation parameters in 2016 |
由于MODIS波段11—16在敦煌场存在饱和现象, 波段18、 19和26受水汽吸收影响严重, 因此, 计算分析只针对前10个和第17波段(中心波长分别为645、 858、 469、 555、 1 240、 1 640、 2 130、 412、 443、 490和905 nm)进行。
表6为MODIS正演大气层顶辐亮度与卫星观测值的相对偏差信息。
| 表6 2016年Terra MODIS正演大气顶辐亮度与卫星观测值的相对偏差 Table 6 The relative deviations between simulated and observed TOA reflectance of Terra MODIS channels in 2016 |
式(2)中, Dif(%)为相对偏差, RadEst为正演大气顶辐亮度, RadMea为卫星观测值。 可以看出, 对于Terra MODIS前10个和17波段, 除了短波红外波段5和7的辐射值太低, 场地定标随机性较大外, 其他波段敦煌场地的正演模拟辐射与观测辐射的平均相对偏差均在5%以内, 可以满足场地绝对辐射定标的要求。
通过基于旋翼无人机的敦煌地表反射率低空测量, 并对测量结果与传统汽车跑场测量进行对比可以看出, 采用多旋翼无人机同步测量, 不仅提高了地表反射特性测量的空间一致性和代表性, 也对宝贵的中国遥感卫星辐射校正场敦煌场区地表进行了有效地保护; 既提高了地表反射特性测量的效率, 又极大的节约了人力物力成本; 通过传统跑场测量和航飞测量的地表反射率数据对比分析, 数据的一致性较好, 并且航飞多次测量的地表反射率数据标准差更小, 航飞数据可以代替跑场数据完成定标。 另外, 低空无人机航飞测量还具有飞行航线设置灵活, 飞行测量采样率高等优势。 通过对TERRA MODIS前10个和17波段的同步测量来对无人机测量数据开展辐射定标评估, 结果表明除了短波红外波段5和7的辐射值太低, 场地定标随机性较大外, 其他波段敦煌场地的正演模拟辐射与观测辐射的平均相对偏差均在5%以内, 可以满足场地绝对辐射定标的要求。
2016年的敦煌辐射校正场星地同步观测试验以旋翼无人机航空同步观测为主, 跑场测量为辅, 完成从航线设计、 航高选择、 仪器参数配置、 采样策略、 航空数据处理的全链路摸底测试, 是辐射校正场首次采用多旋翼无人机低空飞行来代替传统汽车跑场同步测量的全新尝试, 为场地辐射定标试验做好了技术储备。 通过本次试验, 为利用无人机开展敦煌地表反射率低空测量积累宝贵的经验: (1)无人机云台是关系数据有效性的关键设备, 其稳定性和灵敏度直接影响光谱数据的采集精度; (2)增加云台姿态参数(经纬度、 高度、 速度、 俯仰等)实时记录和存储功能; (3)地表像元的尺度效应还有待进一步分析, 航线设计、 航高选择、 反射率白板观测策略等方面还有待进一步优化; (4)悬停测量不会受到飞机加速、 减速和转弯过程机身倾斜而需要进行云台调整的影响, 因此测量的反射率光谱更加稳定; (5)航线设计避免转弯次数过多、 避免大角度的转弯, 航线中增加设置悬停点等。 在近几年的敦煌场星地同步观测试验中地表反射率光谱测量逐步转变为无人机航空测量方式。 随着无人机性能和动力电池的进一步优化和提高, 在不久的将来必将得到更加广泛和深入的应用, 在外场定标试验领域也将发挥更大更重要的作用。
致谢: 此次野外试验由中国遥感卫星辐射校正场管理办公室组织, 国家卫星气象中心牵头, 中国科学院安徽光学精密机械研究所、 敦煌市气象局等多家卫星遥感科研和应用单位共同参与完成, 陈林、 徐娜、 王玲、 闵敏、 李新、 巴秀天等参与了相关工作, 在此一并表示衷心的感谢!
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|