



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
感应读出延时线阳极光子计数探测器研究
[张蕊利1  , 刘永安
, 刘永安1 , 张亚龙1, 2 , 杨向辉1 , 刘哲1 , 苏桐1 , 赵宝升1 , 盛立志1, * ]
, 刘永安]
|
|


作者简介: 张蕊利, 1984年生, 中国科学院西安光学精密机械研究所助理研究员 e-mail: zhangruili@opt.ac.cn
针对空间天文、 生物荧光、 光谱测量等领域对高灵敏、 大面阵探测器的应用需求, 研制出基于感应读出方式的延迟线阳极光子计数成像探测器。 该探测器由微通道板、 延时线阳极以及读出电路组成, 其中延时线阳极的性能直接影响探测器的成像质量。 作为一种电荷感应读出延时线阳极, 该阳极利用信号到达的时间差解码入射光子的位置, 可获得高的探测灵敏度和大的成像面积, 同时简化了工艺难度并提升了可靠性。 设计了感应读出延时线阳极, 理论分析了探测器不同设计参数及材料对感应电荷量的影响, 提出了解决异层电极间感应电荷量难以平衡的方法。 据此研制出了收集面积为40 mm×40 mm的位敏阳极。 测试结果表明该阳极信号传输衰减小于10%, 极间串扰小于3%。 利用该阳极进行了光子计数成像实验, 获得了优于150 μm的空间分辨率, 为研制可应用于天文紫外光谱测量的大面阵、 高灵敏探测器提供了理论依据及实验指导。
, LIU Yong-an
In this paper, we developed a photo-counting imaging detector based on the delay-line anode with induction readout, which has the advantages of high sensitivity and large detective area features. This novel detector is expected to be used in space astronomy, bioluminescence and spectral measurement applications. This detector consists of a microchannel plate (MCP) , position-sensitive anode and readout. Among these key parameters, the performance of position-sensitive anode decides the performances of detectors to a large extent. As a charge induction readout delay line anode, the delay line anode decodes the position information of the incident photon by measuring the time delay between two ends of a propagation line. The detector with the anode can obtain high detection sensitivity and a large imaging area. Image charge pickup anode is placed outside the sealed vacuum tube, which not only simplifies the process difficulty of anode production but also improves the detector's reliability. Firstly, An inductive readout delay line anode was designed. We analyzed the influence of different thicknesses and mediums material of the detector on the induction charge of the position-sensitive anode. Then, a method is used to tackle the induction charge of different layers unbalance issue. After that, we designed and fabricated a 40 mm×40 mm position-sensitive anode. The experiment results indicate that the transmission attenuation of the anode output is less than 10%, and the inter-pole crosstalk is less than 3%. Finally, we implemented aphoton-counting imaging experimental system based on this anode. This experimental system provides better than 150um spatial resolution and can promote the theoretical and practical development of large-area array and highly sensitive detector for space astronomical UV spectrum measurement.
基于微通道板(microchannel plate, MCP)和位敏阳极的光子计数成像探测器具有高探测灵敏度、 大成像面积和高时空分辨能力, 在空间天文、 生物荧光、 光谱测量等领域获得广泛的应用[1, 2, 3, 4]。 例如, NASA的GOLD任务于2018年搭载在通信卫星上, 采用了ϕ 40 mm圆形位敏阳极探测器, 用于紫外地球观测光谱[5]。 2016年, NASA提出LUVOIR(大型紫外光学红外望远镜)计划, 旨在探测和描绘附近恒星周围的宜居系外行星, 对探测器的阵列尺寸要求达到200 mm× 200 mm[6]。 随着科学研究的深入, 各领域对观测数据全面性和准确性的要求不断提升, 对大视场、 大口径望远镜和光谱测量仪器的需求尤为迫切, 进而对探测器的探测面积提出了更高要求。
位敏阳极是探测器的关键组成部分, 作用是对入射光子进行解码。 常用的位敏阳极有电阻阳极(resistive anode, RA)[7]、 楔条形阳极(wedge and strip anode, WSA)[8]、 游标阳极(vernier anode)[9]、 延时线阳极(delay line anode, DL)[10]和交叉条阳极(cross-strip anode, XS)[11]等。 RA阳极、 WSA阳极和Vernier阳极制作工艺和读出电路较为容易, 但受限于阳极结构影响, 其收集面积不能太大(< 100 mm), 计数率不是特别高(最大计数率为~105 Hz)。 交叉条阳极探测器每个阳极条对应一路电子学, 所需的电子学数目异常庞大, 必须使用专用的ASIC电子学系统与其匹配; 延时线阳极通过对到达信号时间差的精确测量解码入射光子的位置信息, 与阳极的有效面积无关, 非常适合大面阵探测器的需求, 且采用脉冲时间测量方式, 避免了电荷分配网络RC时间常数的限制, 最高计数率可达到~1 MHz, 同时满足高计数率的要求。
根据收集电荷方式的不同, 位敏阳极探测器分为电荷直接读出和电荷感应读出两种类型。 相比于电荷直接读出, 感应式阳极探测器中位敏阳极位于真空腔室外部, 将真空器件内的高压部分和外部电路完全隔离, 很大程度减小了真空器件的体积, 极大简化了探测器的工艺制备难度, 提高了探测器的可靠性与灵活性。
本文面向未来空间天文应用中的大面阵、 高灵敏探测需求, 研制出一种新型感应读出延时线位敏阳极探测器。 该阳极通过电荷感应读出方式实现二维方向上延迟线对电荷的收集, 利用电荷信号在延迟线上的传输时间差来解码光子位置, 避免了电荷扩散引起空间分辨下降和边缘图像畸变, 同时兼顾高的空间分辨率和大的成像面积。 最后, 在实验室环境下搭建光子计数成像探测器系统, 对研制的感应延迟线阳极探测器进行了性能测试, 得到了光子计数图像并对该系统的分辨率进行了实验验证。
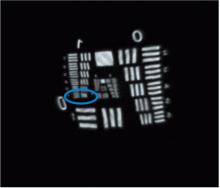
图1是感应式光子计数成像系统原理图和实物图, 探测器位于真空腔体内部, 主要由光电阴极、 微通道板、 半导体薄膜、 位置灵敏阳极构成, 探测器电子学和高压电源位于真空腔体外部。 具体工作过程为: 光子入射光阴极转换成光电子, 光电子经 MCP(双MCP结构、 Z字形MCP结构)倍增后输出电荷云团, 在加速场作用下到达半导体薄膜。 由于半导体薄膜呈高阻状态, 电荷云团在半导体薄膜上扩散, 并在基底背面的延时线阳极上感应出电荷信号, 电荷信号沿延迟线向两端传输并分别进入读出电子学, 经位置解码和数据处理获得电荷云团的质心位置。
 | 图1 探测器系统原理和系统照片 (a): 感应读出光子计数成像系统原理图; (b): 感应读出光子计数成像系统照片Fig.1 Detector system principle and system photos (a): The schematic of the inductive readout photon counting imaging system; (b): Photo of the inductive readout photon counting imaging system |
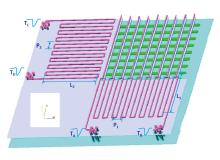
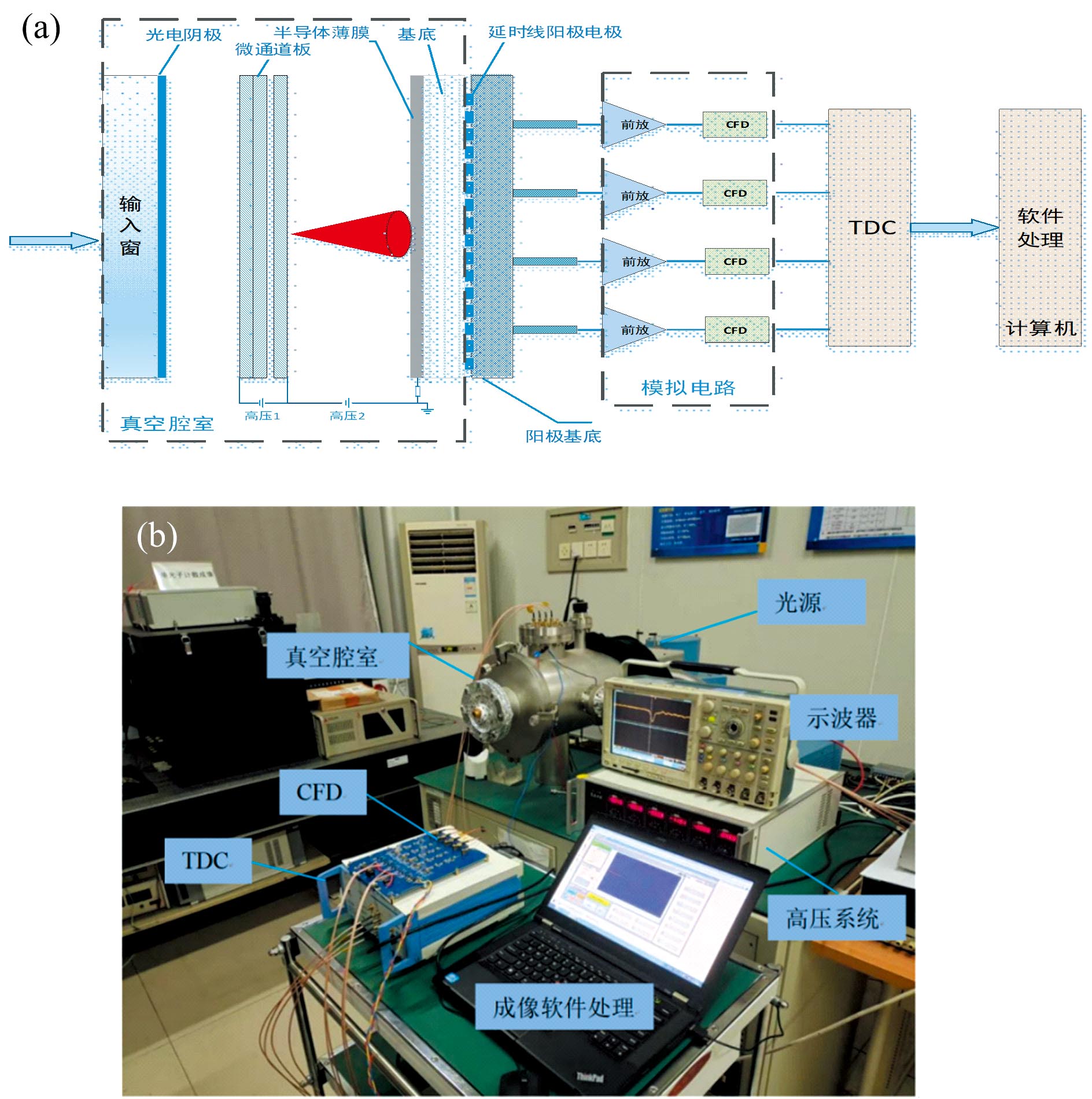
感应读出方式延时线阳极与传统的延时线阳极[12, 13]相比, 采用商业印刷电路板加工制作, 制作周期短且造价低。 在结构上将感应单元和延时单元物理隔离, 有效降低了两维方向感应信号之间的串扰, 结构如图2所示。 感应单元由两列相互垂直交叉的金属电极条阵列构成, 通过感应方式收集MCP出射的电子云团。 收集到的电荷信号经X和Y方向的蛇形线延时单元相互叠加, 分别向两边传输。 因信号在延时线上的传输速度是固定的, 信号到达延时线两边的时间差与入射位置呈线性关系, 因此通过时间差就可反演得到入射光子空间位置信息。
 | 图2 感应读出延时线阳极示意图Fig.2 Schematic diagram of anode for induction readout delay line |
假设信号在金属电极条中的传输速度为v0, 沿X方向蛇形延迟线中传播的速度为v1, X方向延时线周期长度为P1。 沿Y方向蛇形延迟线中传播的速度为v2, Y方向延时线周期长度为P2, 根据理想传输线理论得出
位敏阳极基底相对介电常数为ε r, 则感应信号在X方向上的等效传输速度为
其中k为修正系数, 同理可得到感应信号在Y方向上等效传输速度。 从而得出电子云团质心坐标位置
从式(3)中可以看出, 入射光子的位置信息与信号在阳极上的传输速度和信号到达时间有关, 与阳极的面积无关。 为保证空间分辨率不受阳极电极尺寸的影响, 电荷云团需覆盖位敏阳极上多个电极[14]。 采用CST软件仿真得出感应读出探测器中电荷云尺寸为0.387 mm, 得出在X方向同层电极的设计周期P1为1.22 mm, 在Y方向异层电极设计周期P2为1.28 mm。
图2所示的阳极结构中位敏阳极的收集电极位于不同平面, 感应深度的差异会引起感应电荷量的不同, 从而影响探测器的性能, 严重时可导致后端电子学接收不到感应信号。 因此由感应深度导致的各电极间感应电荷量的均衡问题需重点考虑。
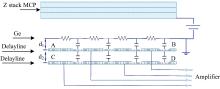
假设半导体薄膜和异层电极间电压稳定不变, 位敏阳极异层电极之间感应电荷量的变化通过电容变化来评估。 其等效电路如图3所示。
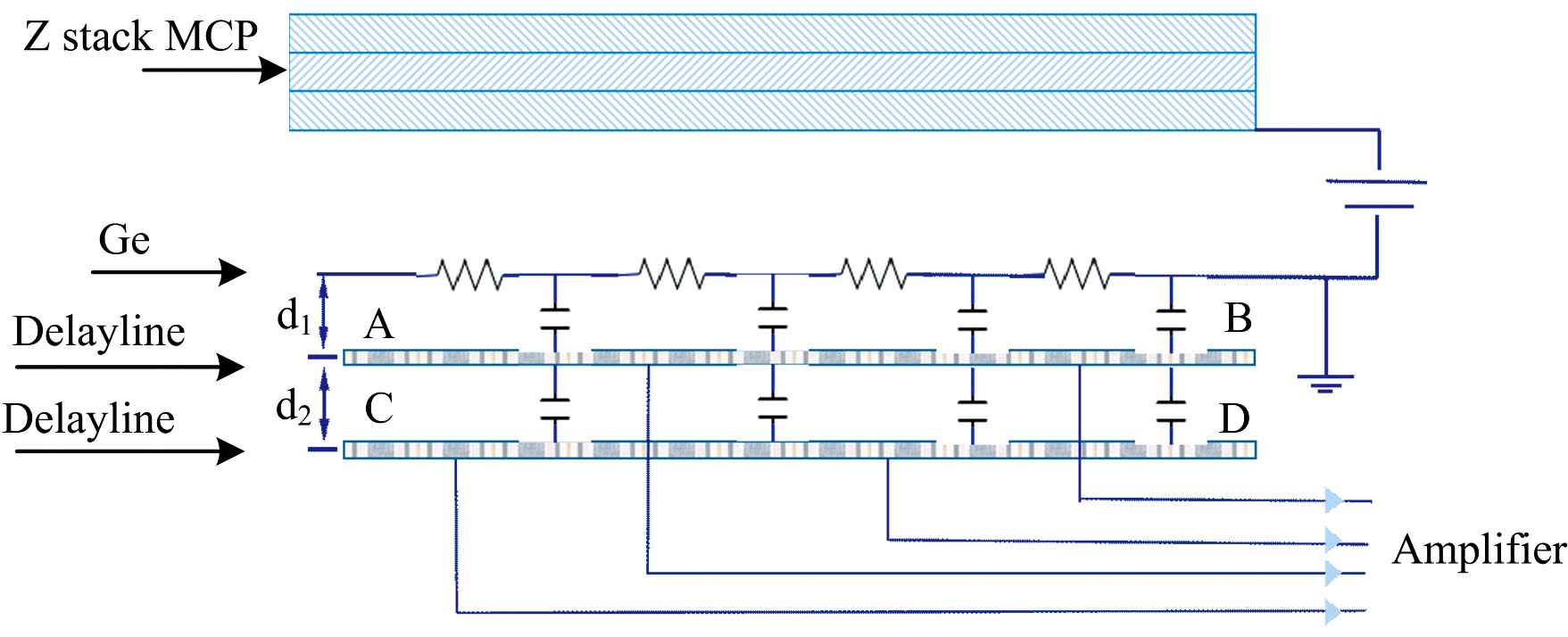 | 图3 感应电荷读出等效图Fig.3 Equivalent diagram of inductive charge readout |
A、 B为近贴陶瓷基底电极, C、 D为远离陶瓷基底电极, 陶瓷基底厚度为d1, 位敏阳极基底厚度为d2, 陶瓷基底相对介电常数为ε ab, 位敏阳极基底介电常数为ε cd, 陶瓷基底上薄膜厚度为μ m级别, 相对于位敏阳极基底厚度可以忽略。 假设半导体薄膜上感应到的电荷均匀分布且异层电极面积均为S, 则收集电极AB、 收集电极CD和半导体薄膜之间构成的电容为Cab、 Ccd, 因此可以等效计算出电极间感应厚度分别为
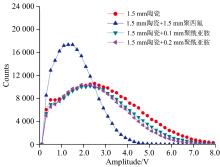
式(5)中, ε 0为真空介电常数, 感应深度和电极的材料以及电极的电容大小密切相关。 实验中将近贴陶瓷基底和远贴陶瓷基底更换为不同组合介质材料, 通过测量异层感应结构中电极间电荷量大小的方法来衡量不同介质材料对感应深度的影响。 在探测器中各电极施加电压为-300和-2 800 V的情况下, 耦合两个异层电极构成镜像电荷读出结构, 收集阳极感应到的电荷信号通过读出电子学系统处理后进入计算机。 将测试得到的数据进行处理, 将收集阳极感应信号的脉冲高度分布(pulse height distribution, PHD)作为感应电荷量大小, 从而得到不同介质材料和厚度条件时感应电荷量变化, 如图4所示。 在陶瓷基底基础上增加较薄的介质材料如聚酰亚胺时, 感应电荷量变化较小。
 | 图4 不同材料组合下脉冲高度分布图Fig.4 Pulse height distribution plot with different material combinations |
当电极材料、 基底材料确定后, 电极电容越大, 感应深度越小, 感应电荷量越多。 感应深度受制备工艺影响, 通过调整感应深度、 电极CD面积、 电极AB面积相结合的方式, 实现位敏阳极两个异层电极感应电荷量的平衡。 设计中通过增加收集电极CD的线宽来加大收集电极电容, 弥补感应深度带来的感应电荷量下降。 考虑到异层电极电荷量平衡和阻抗匹配等因素, 用阻抗匹配软件计算出阳极面板AB收集电极线宽为0.18 mm, CD收集电极线宽为0.24 mm。 对应的阳极输出信号如图5所示, AB电极和CD电极输出脉冲幅度接近, 其幅度比约为0.9, 表明两异层收集电极感应电荷量平衡良好。
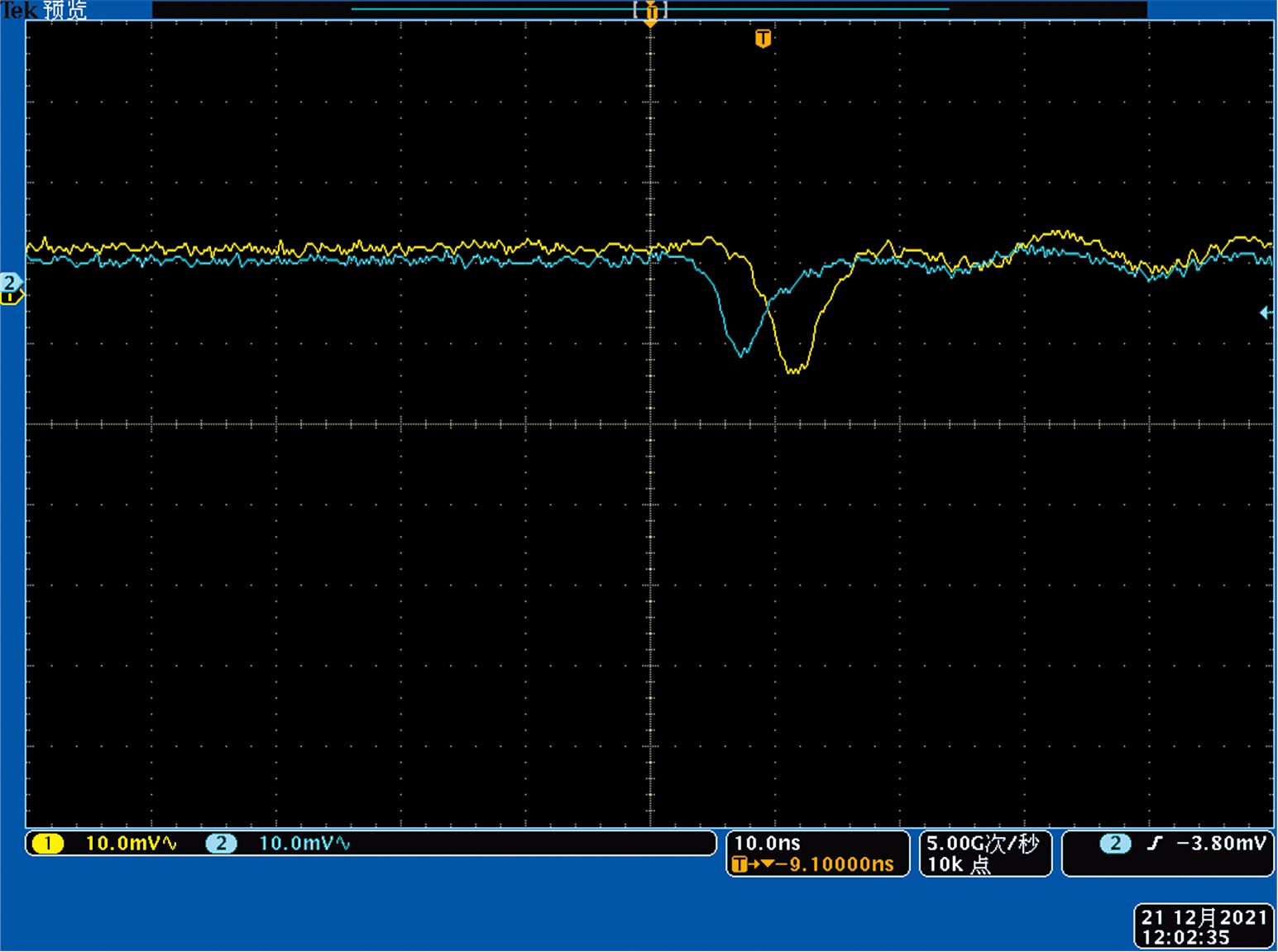 | 图5 阳极中两延时线输出脉冲Fig.5 Two delay line output pulses of XDL anode |
感应电荷在延时线上的传输延时时间是解码入射光子位置信息的重要参数。 如果延时单元传输衰减太大, 会导致输出信号幅度过小, 使系统信噪比降低, 从而影响探测器的成像性能。 为了匹配电子学信号处理范围, 阳极输出的信号幅度不能太小, 需有效控制阳极信号的传输衰减。 综合考虑到损耗因子、 介电常数、 研制成本以及周期等因素, 阳极设计中选用损耗低的TU872材料, 在满足特性阻抗的前提下, 加大布线宽度并减少铜箔的粗糙度以减小信号的损耗[15, 16]。 根据实验室真空腔室现有夹具尺寸和MCP尺寸, 制作的阳极实物照片如图6所示, 阳极面板电极收集区域尺寸为40 mm× 40 mm。
 | 图6 感应读出延时线阳极实物照片 (a): 阳极感应收集面; (b): 阳极信号输出面Fig.6 Photo of inductive readout delay line anode (a): The inductive charge collection surface of the delay line anode; (b): The signal output surface of the delay line anode |
图6所示制作出的延时线阳极, 沿X方向延时线电极电阻为5.135 Ω , 沿Y方向延时线电极电阻为5.193 Ω 。 在1 kHz时, 分别测量了两个方向收集电极对地的电容分别为0.503和0.486 nF, 与理论设计吻合。
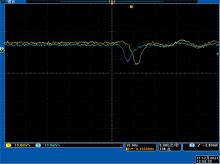
阳极接收到感应电荷并分别沿延时线向两端传输。 阳极的延时单元信号传输衰减过大, 会降低探测器的成像性能。 阳极信号的传输衰减通过延时线的输出信号和输入信号之比来定义。 实验通过函数信号发生器产生标准方波信号, 将该信号分为两路, 其中一路信号直接输入示波器, 另一路信号输入延时线阳极中延迟线的一端, 信号经延迟线传输同时进入示波器, 得到信号经过延时线阳极延迟前后的时间差别。 图7为测试得到阳极两个方向上延时线的衰减波形, 从波形上可以看出, 上层感应信号和下层感应信号的衰减小于10%。
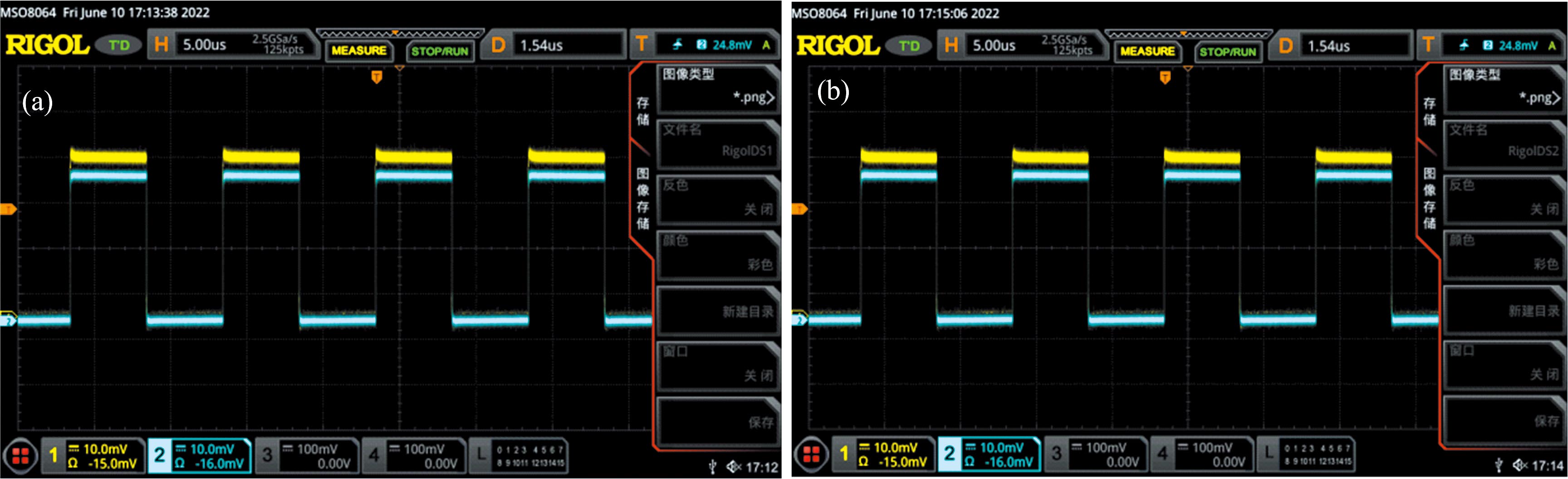 | 图7 信号传输衰减测试结果 (a): 上层感应信号衰减(蓝色); (b): 下层感应信号衰减(蓝色)Fig.7 Signal transmission attenuation test of XDL anodes (a): Attenuation of the delay line anode top layer singal (blue); (b): Attenuation of the delay line anode bottom layer singal (blue) |
实验采用标准方波信号分别驱动图3中电极AB(1通道)、 电极CD(2通道), 分别测试电极AB、 电极CD的输出信号, 结果如图8所示, 结果表明串扰小于3%。
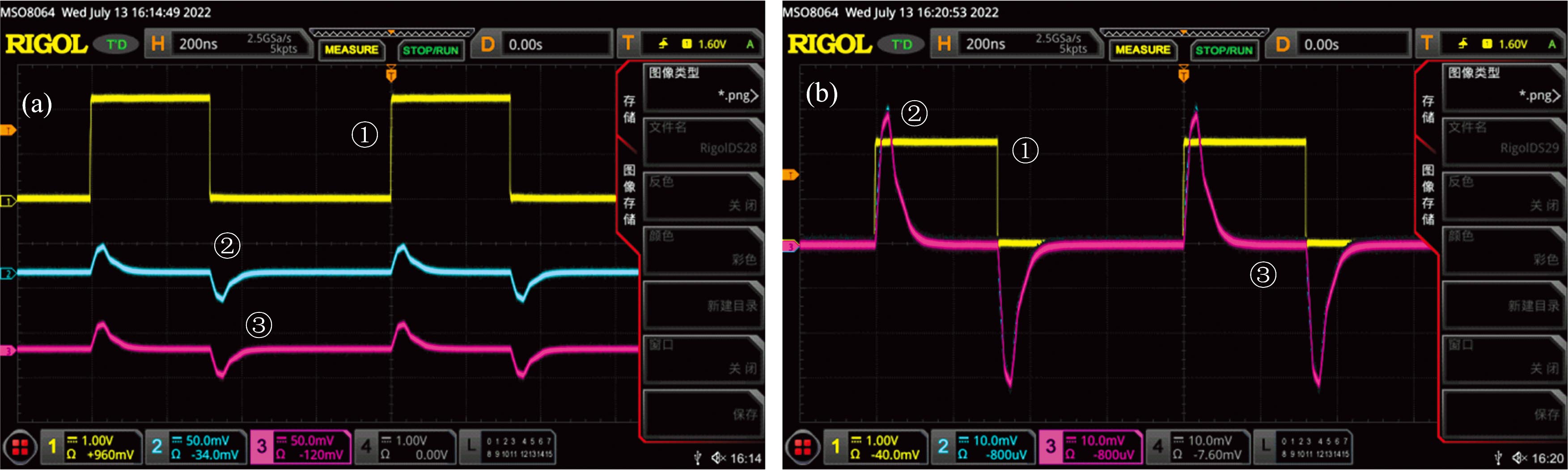 | 图8 延时线阳极串扰测试 ①: 上层延迟线输入信号(黄色), ②: 下层延迟线一端输出信号(蓝色), ③: 下层延迟线上另一端输出串扰信号(红色)Fig.8 Crosstalk performance test of XDL anode ①: The top-layer input signal of the delay line anode (yellow); ②: The output of the bottom end of the delay line anode (blue); ③: The output of the other end of the bottom layer (red) |
阳极两个感应层之间的地平面, 除了给上层感应信号提供回流路径, 同时也将上层感应信号和下层感应信号隔离开, 减少了两个感应层信号之间的串扰。 X、 Y方向延时单元的微带传输线分别位于感应单元的侧面, 尽量避开信号传输延时的串扰, 使感应读出延时线阳极的串扰最低。
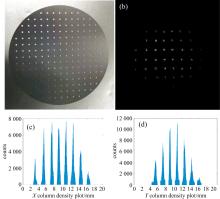
采用小孔阵列对探测器成像进行线性度测试。 图9(a)为试验中所用的小孔阵列掩模板, 其厚度为0.08 mm、 小孔直径为0.5 mm、 孔间距为2 mm。 测试中, 小孔板紧贴MCP入射面, 在系统真空度优于1× 10-5 Pa, MCP两端电压为-2 800 V, MCP 出射面和半导体薄膜(Ge膜)之间电压为-300 V的条件下, 读出电子学采集2 min得到的成像结果如图9(b)所示。 图9(c)和(d)分别为图9(b)沿X轴和Y轴的柱状图。 由试验结果可知, 除边缘位置发生稍许畸变外, 探测器成像线性度良好, 沿X和Y方向非线性度< 5%。
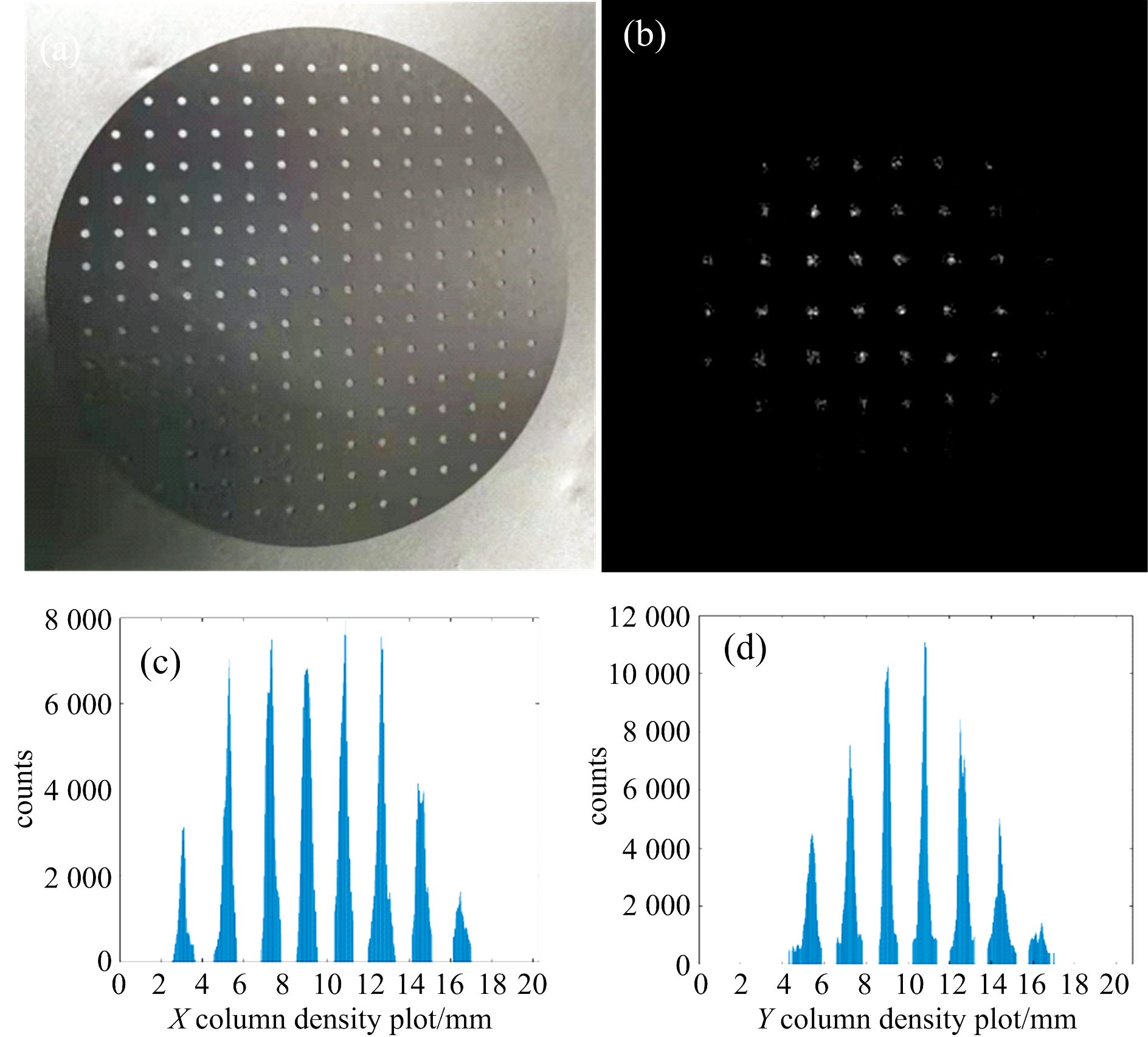 | 图9 小孔阵列模板成像结果 (a): 小孔掩模板实物; (b): 小孔模板的灰度图像; (c): 沿X轴柱状密度图; (d): 沿Y轴柱状密度图Fig.9 Imaging results of pinhole mask (a): Photo of the pinhole mask; (b): Grayscale image of the pinhole mask; (c): Column density plot along the X-axis; (d): Column density plot along the Y-axis |
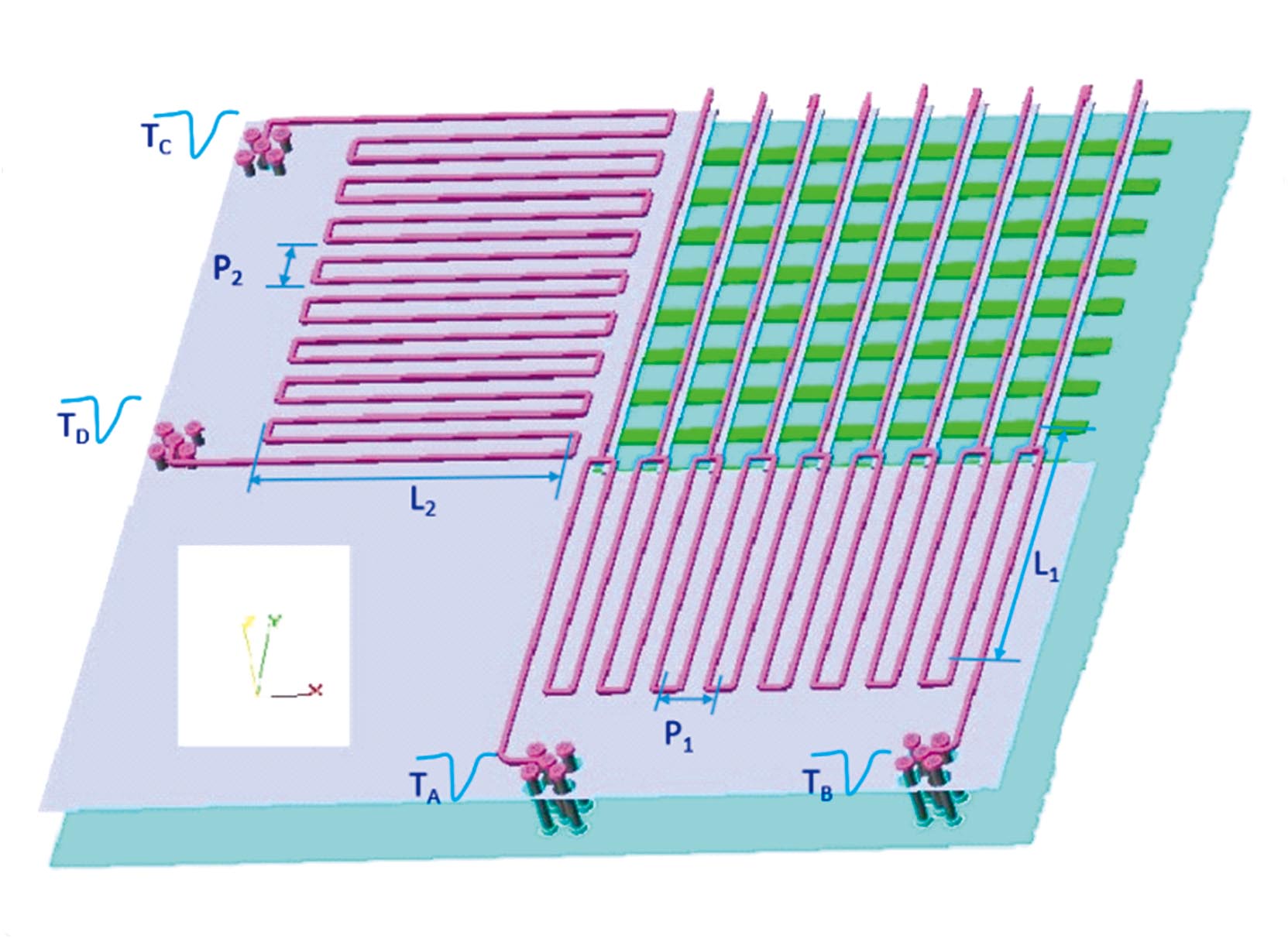
采用USAF1951鉴别率板测试系统的空间分辨率, MCP两端电压为2 800 V, MCP出射面和半导体薄膜(Ge膜)之间电压为-300 V, 探测器读出电子学采集10 min得到的成像结果如图10所示。
 | 图10 探测器空间分辨率测试结果Fig.10 Spatial resolution performance test results of the detector |
判断探测器空间分辨率的依据为成像调制度M。 调制度M指探测器空间分辨率模板图像中, 某一组分辨率图形中相邻两条明暗相间条纹中亮度最大条纹与亮度最小条纹间灰度差与灰度和的比值[17], 计算如式(6)
式(6)中, Imax为最大灰度值, Imin为最小灰度值, 调制度M值介于0和1之间。 调制度M数值越大, 表示图像条纹的反差越大, 代表该图像越容易分辨。 对于均匀灰度图像, 则最大亮度和最小亮度相等, 调制度M为0。 由于人眼的分辨能力有限, 一般选取M为0.03作为目视分辨率极限。
按照式(6)对图10中第1组第6单元条纹进行图像处理, 得到横向和纵向两个方向的调制度M分别为0.12和0.1。 实验表明: 探测器能够区分第一组第6行条纹, 空间分辨率优于150 μ m。
系统分析了感应式延迟线阳极探测器不同厚度、 不同介质材料对蛇形延迟线位敏阳极感应电荷量的影响, 并解决异层电极间感应电荷量平衡的方法。 基于此, 研制出收集面积为40 mm× 40 mm的位敏阳极, 为未来扩展至更大成像尺寸的探测器研制提供了技术路线和工艺基础, 并搭建了实验系统对性能参数进行测试。 结果表明: 阳极信号传输衰减小于10%, 极间串扰小于3%, 空间分辨率优于150 μ m。 下一步, 将采用介电常数更高的Rogers材料进行优化设计, 提高探测器空间分辨率性能, 推动大面阵高灵敏位敏阳极探测器在空间天文探测领域的应用。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|