






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于透射曲线拟合的高精度激光吸收光谱温度检测方法
[高慧 , 姚树智, 张蒙, 姜萌, 张子昊, 王学锋, 杨勇
, 姚树智, 张蒙, 姜萌, 张子昊, 王学锋, 杨勇* ]
, 姚树智, 张蒙, 姜萌, 张子昊, 王学锋, 杨勇]
|
|


作者简介: 高 慧, 女, 1992年生, 北京航天控制仪器研究所工程师 e-mail: lumos_work@163.com
可调谐激光吸收光谱技术在流场检测领域应用越来越广泛, 然而恶劣的现场应用环境对测试系统的环境适应性、 抗噪声干扰能力提出了更高的要求。 直接吸收光谱技术可以获得吸收峰的全部信息, 对多类测试环境均适用, 如风洞, 发动机喷射流场等, 然而受现场测试环境影响, 获得的测试信号信噪比通常较差, 难以实现高精度检测。 针对这一问题, 对直接吸收光谱技术的数据处理分析算法进行了分析研究, 提出了一种基于透射曲线拟合的高精度温度反演分析方法。 利用水汽在7 185.6和7 444.3 cm-1附近的吸收谱线, 研制了基于直接吸收光谱检测技术的温度检测系统, 开展了573K-1173K温度范围内测试信号的处理分析, 对比分析了基线-吸收线型拟合算法与透射曲线拟合算法的反演结果。 当检测温度为773 K时, 相比基线-吸收线型拟合算法, 透射曲线拟合算法在7 444.3 cm-1波段附近的逐点拟合误差峰峰值可以减小约30%, 7 185.6 cm-1波段附近的逐点拟合误差峰峰值可以减小约16%。 573~1 173 K温度范围内, 透射曲线拟合算法反演温度最大误差为13 K, 相比基线-吸收线型拟合算法减小了23 K。 给测试信号加入不同幅度的随机噪声信号, 两种算法反演温度的标准差均随噪声幅度的增加而增加, 同时温度越高, 温度反演标准差越大。 当噪声的峰峰值分别为20、 60和100 mV时, 不同温度下基线-吸收线型拟合算法温度反演结果的标准差最小值为18 K, 最大值为313 K, 透射曲线拟合算法温度反演结果的标准差最小值为4 K, 最大值为44 K。 实验分析结果表明, 相比基线-吸收线型拟合算法, 透射曲线拟合算法可以修正激光器功率基线拟合误差, 提高透射信号拟合精度, 减小温度反演误差。 对比不同噪声水平下测试信号的温度反演结果表明, 透射曲线拟合算法在噪声干扰下可以实现更高的检测精度, 具有更强的抗噪声干扰能力。
The tunable diode laser absorption spectroscopy technology is widely used in flow field detection. However, the harsh environment of on-site application puts higher requirements on the test system's environmental adaptability and anti-noise interference ability. Direct absorption spectroscopy technology can obtain all the information on the absorption spectrum and is suitable for many types of test environments, such as wind tunnels and engine flow fields. However, due to the influence of a harsh on-site test environment, the signal-to-noise ratio of the obtained signals is usually poor, and it isn't easy to achieve high-precision detection. This article analyzes the data processing and analysis algorithm of direct absorption spectroscopy technology and proposes a high-precision temperature analysis method based on transmission curve fitting for this problem. A temperature detection system based on direct absorption spectroscopy technology was developed using the absorption spectra of water vapor near 7 185.6 and 7 444.3 cm-1. The processing and analysis of test signals in the temperature range of 573~1 173 K were carried out. The analysis results of the baseline-absorption line fitting algorithm(BALF) and the transmission curve fitting(TCF) algorithm were compared. When the detection temperature was 773 K, compared with the BALF algorithm, the peak-to-peak fitting error near 7 444.3 cm-1 of the TCF algorithm can be reduced by about 30%, and the peak-to-peak fitting error near 7 185.6 cm-1 can be reduced by about 16%. In the temperature range of 573~1 173 K, the maximum error of the TCF algorithm for temperature inversion is 13 K, which is reduced by 23 K compared with the BALF algorithm. When random noise signals with different amplitudes were added to the test signals, the standard deviation of test results using these two algorithms increased with noise amplitude. Moreover, the higher the temperature, the greater the standard deviation of test results. When the peak-to-peak noise value was 20, 60, and 100 mV respectively, for different temperatures, the minimum standard deviation of test results using the BALF algorithm was 18 K, and the maximum was 313 K. The minimum standard deviation of test results using the TCF algorithm is 4 K, and the maximum is 44 K. Experimental analysis results show that compared with the BALF algorithm, the TCF algorithm can correct the baseline fitting error of laser power, improve the fitting accuracy of transmission signals, and reduce temperature analysis errors. Comparing the temperature analysis results of test signals under different noise levels shows that the TCF algorithm can achieve higher detection accuracy and precision under noise interference and has stronger anti-noise interference ability.
激光吸收光谱层析成像技术是激光吸收光谱技术与层析成像技术的结合, 可以实现二维或三维空间中气体浓度、 温度等物理量的分布求解, 被广泛应用于流场监测、 燃烧诊断等应用领域[1, 2]。 吸收光谱技术是一种视线测量技术, 测量信号与光束路径上气体浓度、 温度、 压力的路径积分有关。 通过在二维或三维空间中布设多条拓扑检测光路, 利用层析成像技术, 可实现对空间中网格的温度、 气体浓度等未知量的求解[3, 4, 5, 6]。 在实际的工程应用中, 激光吸收光谱层析成像技术测量系统的误差主要来源于两部分, 一部分是光束信号的测量误差, 另一部分是布设光束数量小于网格未知数带来的重建误差。 目前, 大部分的研究关注的都是优化光束布设方案和重建算法[7, 8, 9, 10], 减小重建反演误差, 对光信号测试误差的影响关注较少。 但测试光信号是进行二维重建计算的基础, 因此减小透射光信号的测量分析误差也是提高测量系统检测精度的关键因素之一。
透射光信号的测量误差主要来源于测量系统和恶劣的测试环境, 其中测试环境的噪声干扰是影响测量信号信噪比的重要因素[11]。 目前可调谐激光吸收光谱(tunable diode laser absorption spectroscopy, TDLAS)技术有两个技术分支, 波长调制光谱(wavelength modulation spectrum, WMS)技术和直接吸收光谱(direct absorption spectrum, DAS)技术。 WMS技术通常利用吸收光谱调制解调后的谐波信号反演计算温度, 适用于气体弱吸收检测, 灵敏度高, 但谐波信号幅值直接受激光功率变化的影响[12, 13]。 为解决这一问题, 发展出了WMS-2f/1f技术, 该技术利用一次谐波(1f)信号对二次谐波(2f)信号进行归一化, 可以消除光功率波动的影响[14]。 DAS技术适用于气体强吸收检测, 可以获得吸收光谱的全部信息, 但易受基线拟合误差影响[15, 16, 17, 18]。 对于工程现场应用, WMS技术可以获得更高的检测信噪比, 但该技术一般利用谐波峰值进行温度计算, 无法直接消除因压力变化引起的气体吸收线型变化的影响, 对于带压流场检测, 通常需要增加额外的压力检测补偿手段。 而DAS技术通过对吸收光谱求积分吸光度, 可以有效地消除吸收线型变化的影响, 在大多数应用场景中均适用。 Liu等利用波长在1.4 μ m附近的单只可调谐激光器研制了温度检测系统, 并对平焰炉和超燃冲压发动机模型流场进行了温度测试[19]。 Lee等联合TDALS技术和激光诱导击穿光谱(laser-induced breakdown spectroscopy, LIBS)技术实现了温度一维分布检测[20]。 Gong等利用中红外激光器通过检测SO2实现了对温度的测量, 并对比分析了DAS、 WMS和WMS-2f/1f三种检测技术的检测性能[21]。 目前基于DAS技术的温度测量研究, 数据分析处理通常采用基线-吸收线型拟合(baseline-absorption line fitting, BALF)算法, 在恶劣应用环境下, 噪声干扰严重, DAS技术的检测效果还有待进一步提高。
本文在研究分析基于直接吸收光谱技术的温度测量系统的信号处理分析过程的基础上, 研制了高精度单光路温度检测系统, 搭建了高温测试分析实验平台, 提出了一种透射曲线拟合求解算法, 减小了积分吸光度求解误差, 提高了温度反演求解精度。 同时通过分析不同噪声水平下测试信号的温度计算结果, 验证了透射曲线拟合算法可以有效地提高系统的检测精度和抗噪声干扰能力。
根据TDLAS温度检测原理, 当波长为ν 的光束穿过含有待测组分的空间后, 透射光与入射光功率之间的关系可以用Beer-Larmbert定理表述
式(1)中, ν 为光束频率; It(ν )为透射光功率; I0(ν )为入射光功率; P为待测空间气压; X为待测组分摩尔分数; S(T)为温度T时气体分子的吸收线强; g(ν )为分子吸收线型函数; L为光与待测组分作用光程长度。
g(ν )函数线型与分子气压有关, 是频率归一化的线型函数, 有
S(T)是与温度有关的函数, 可表示为
在待测组分整个吸收线型光频率范围内对入射光频率进行扫描, 并对入射光与透射光比值的对数求积分, 可得
式(4)中, Aν 称为积分吸光度。 当同一组分的两条独立吸收谱线的连续光频率扫过同一待测空间时, 可以分别得到两条吸收谱线的积分吸光度。 计算两条吸收谱线的积分吸光度的比值, 可得
式(5)中, S1(T0)、 S2(T0)分别为对应吸收谱线的线强; E1、 E2分别为对应吸收谱线吸收跃迁的低能级能量; h为普朗克常数; c为光速; k为玻尔兹曼常数。 根据式(5)可得温度与积分吸光度比值的关系如式(6)
根据式(6), 利用两条吸收谱线积分吸光度的比值就可实现温度的反演求解。
当存在环境噪声干扰时, 会直接影响测量信号的信噪比, 进一步影响积分吸光度计算的准确性。 当两条吸收光谱的积分吸光度求解不确定度分别为uA1和uA2时, 根据不确定度传递原理, 对应的温度计算结果不确定度为
$u_{T}=\frac{\frac{1}{A_{v 1}} \frac{h c}{k}\left(E_{2}-E_{1}\right)}{\left(\ln R+\ln \frac{S_{2}\left(T_{0}\right)}{S_{1}\left(T_{0}\right)}+\frac{h c}{k} \frac{\left(E_{2}-E_{1}\right)}{T_{0}}\right)^{2}} \sqrt{\left(\frac{u_{A 2}^{2}}{A_{v 2}^{2}}-u_{v 1}^{2}\right)}$(7)
实际应用中测试系统采集到信号It(ν ), 根据上节的计算公式, 要获得积分吸光度, 必须对It(ν )进行处理计算。 目前普遍采用BALF处理分析方法需要先从It(ν )信号中选择合适的数据点进行拟合得到功率基线解析式, 然后再根据功率基线和测试信号计算得到吸收光谱, 然后对吸收光谱进行拟合获得吸收光谱解析式, 进一步求解得到积分吸光度。 通过分析算法处理过程可以发现, 激光器的功率基线是利用采集信号中没有气体吸收的点拟合得到, 在后续的处理过程中不再改变, 由于采集信号曲线中可以用于基线拟合数据点数有限, 在环境噪声影响较大时, 可能产生较大误差, 影响最终温度检测计算结果。
本文提出了一种基于透射曲线的迭代拟合求解方法, 通过构建采集透射信号的解析表达式, 同时对功率基线解析式和吸收光谱解析式进行优化迭代, 可以有效提高功率基线的拟合精度。 针对每只激光器的透射信号, 通过选择合适的拟合范围, 对单条吸收谱线进行透射曲线拟合。 令透射信号表达式为
式(8)中, it为激光器驱动电流, ν t为激光器输出激光波数, k1、 k2、 k3、 A1、 A2、 A3为待拟合系数。 拟合算法流程图如图1所示。 首先利用没有气体吸收区域对应的电流信号、 透射信号进行多项式拟合, 获得k1、 k2、 k3的初始值; 然后利用透射信号与上一步拟合的多项式曲线计算初始吸收曲线, 根据初始吸收曲线的峰值、 峰值对应的波数及半高全宽获得A1、 A2、 A3的初始值; 再利用系数初始值和迭代拟合算法得到透射曲线的拟合表达式; 最后根据透射曲线拟合表达式及激光器调制输出波数计算获得吸收谱的积分吸光度。
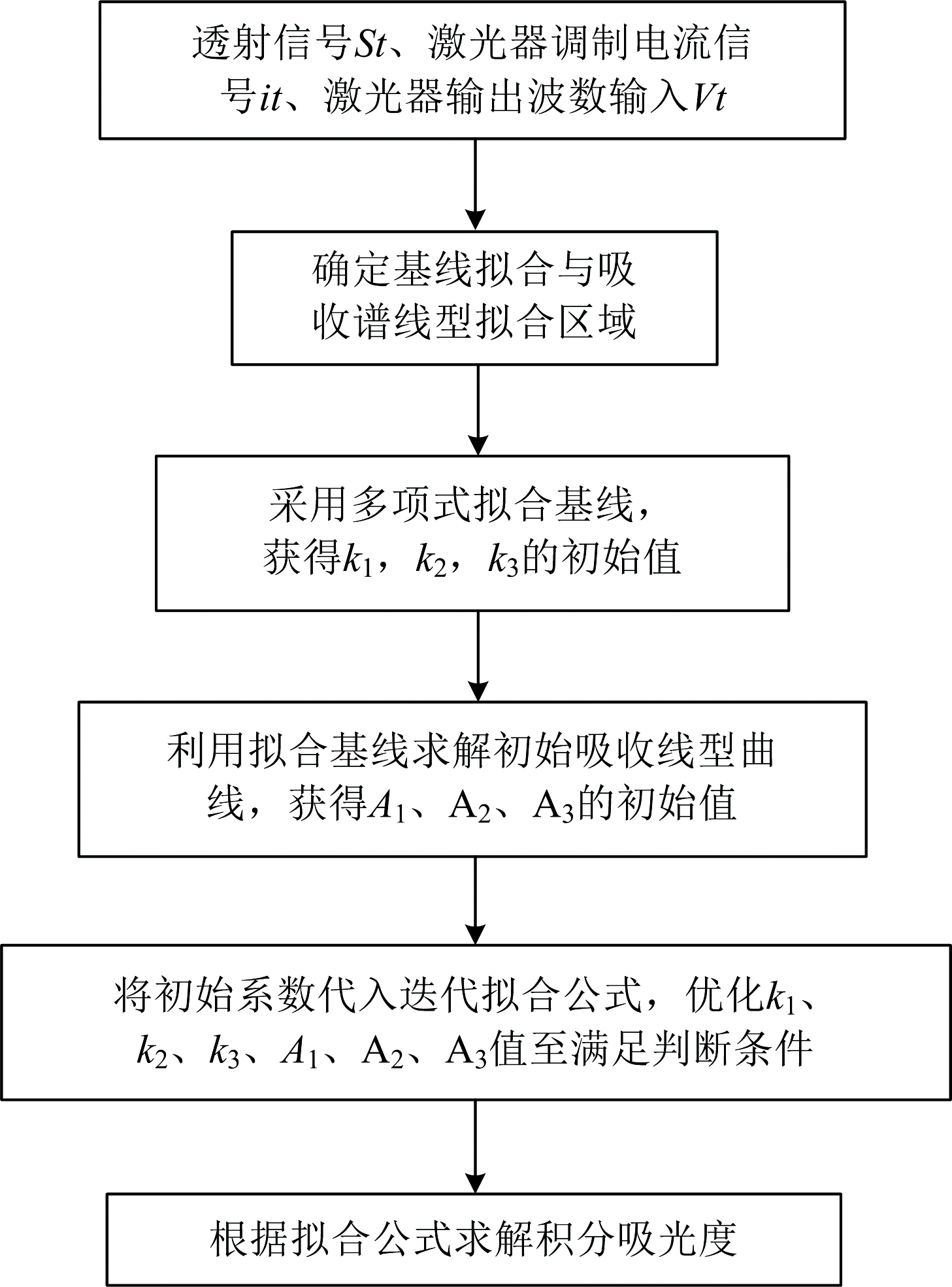 | 图1 透射曲线拟合算法流程图Fig.1 The flow chart of transmission curve fitting algorithm |
根据透射曲线拟合解析式, 可以计算得到积分吸光度为
曲线拟合误差采用误差平方和的平均值来表征
式(10)中, N为一个测试周期内接收到的两个波长探测信号中选择用于拟合的数据点数, Sf为拟合信号, Sm为测试信号。
选取水汽在7 185.6和7 444.3 cm-1附近的两条吸收谱线进行测试, 搭建的TDLAS温度测试系统示意图和实物图如图2所示。 信号发生器模块产生两路锯齿调制信号, 分别控制两个激光驱动控制器, 使两只激光器的输出光波长分时扫过待测组分的两条独立吸收谱线。 两只激光器出射光经合束后通过光纤准直器进入TDLAS中温校准装置, 穿过标校管后被接收端准直器接收。 接收端准直器接收光信号后传输至探测器, 探测模块将光信号转换为电信号, 经过采集电路转换为数字信号, 最后传输至上位机进行处理。
 | 图2 (a)TDLAS测温系统示意图; (b)TDLAS测温系统实物图Fig.2 (a) The schematic diagram of TDLAS temperature measure system; (b) The physical map of TDLAS temperature measure system |
实验中, 锯齿信号的频率设置为1 kHz。 激光器的电流扫描范围分别设置为80~92和60~90 mA。 TDLAS中温校准装置可提供长度20 cm, 温度可控的恒温区, 温度调节范围为373~1 273 K, 恒温区两端分别为两段变温区。 标校管置于TDLAS中温校准装置内, 标校管可分为独立的三段空间, 分别对应中温校准装置两端的变温区和中间的恒温区。 在测试过程中, 通过导管1和2向标校管恒温段注入一定浓度的水汽, 通过导管3和导管4向两端的变温区通入高纯氮气, 消除测试光路上环境中水汽的干扰。 采集电路输入噪声电压峰峰值为1 mV, 电路采集频率设置为500 kHz。
将TDLAS中温校准装置温度分别设置为373、 573、 773、 973和1 173 K, 测试不同温度下的透射信号, 采用透射曲线拟合(transmission curve fitting, TCF)算法对测试数据进行分析。 为分析算法的温度反演效果, 同时采用BALF算法进行对比。 以773 K时的测试结果为例, 两种算法的拟合结果如图3所示。 图3(a)和(b)为BALF算法的基线拟合结果, 图中的蓝色格点为选择用于基线拟合的数据点, 红色曲线为待拟合的测试曲线, 黑色虚线为基线拟合曲线。 从图中可以看出, 水汽在7 185.6和7 444.3 cm-1波长附近均存在干扰吸收峰, 为了提高积分吸光度拟合求解精度, 在选择拟合区域时需避开干扰吸收峰。 图3(c)和(d)为BALF算法的吸收光谱拟合结果, 其中红色曲线为利用测试信号和拟合基线计算后得到的吸收光谱, 蓝色格点为选择用于吸收光谱拟合的数据点, 避开了附近的干扰吸收峰, 黑色虚线为拟合吸收光谱曲线。 图3(e)和(f)为TCF算法的拟合结果, 同样红色曲线为测试透射信号, 蓝色格点为选择用于透射曲线拟合的数据点, 黑色曲线为拟合曲线。 经过分析计算, 两种算法的拟合相关系数均大于99%。
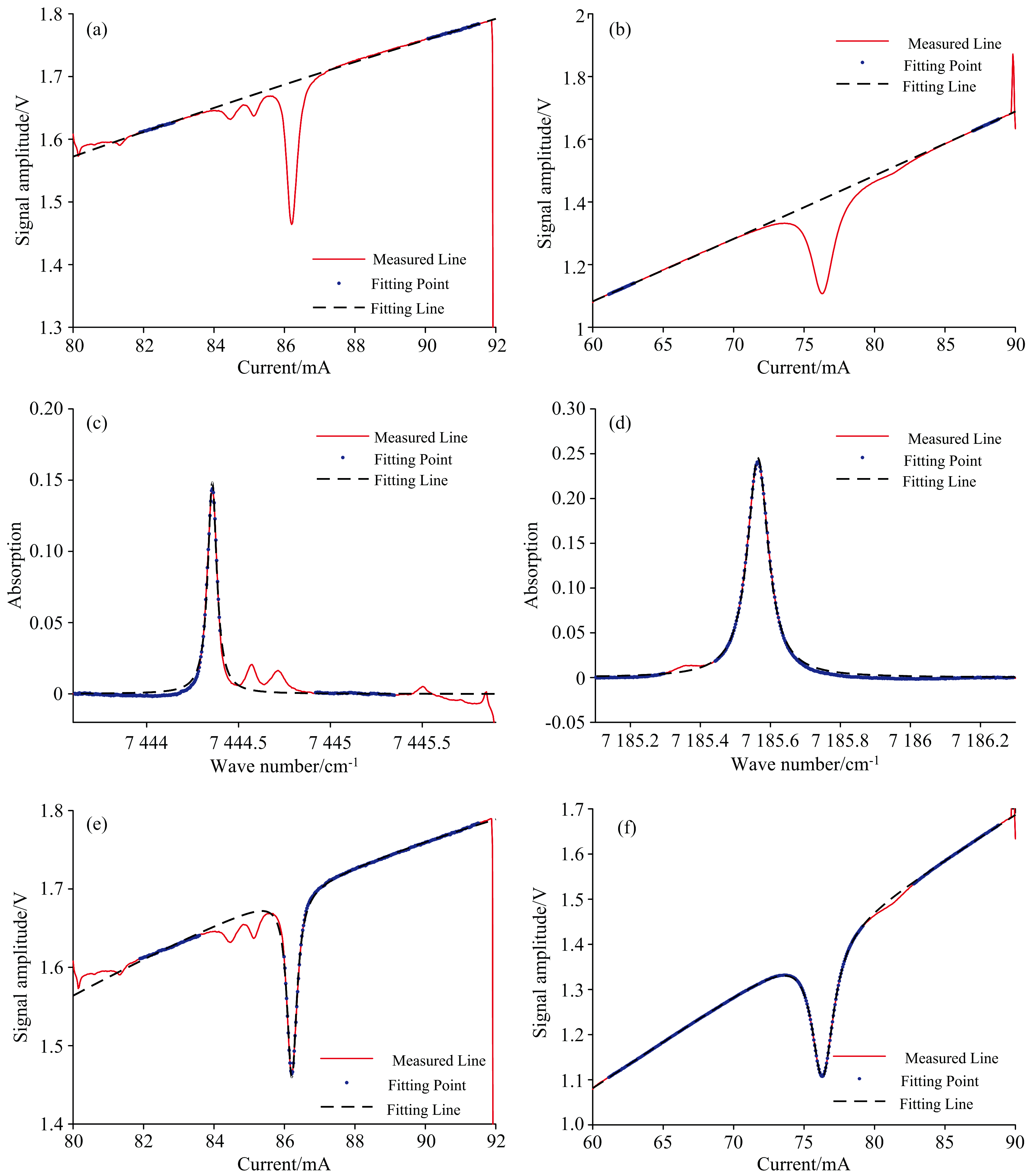 | 图3 (a) 7 444.3 cm-1波数附近BALF算法基线拟合结果; (b) 7 185.6 cm-1波数附近BALF算法基线拟合结果; (c) 7 444.3 cm-1波数附近BALF算法吸收谱拟合结果; (d) 7 185.6 cm-1波数附近BALF算法吸收谱拟合结果; (e) 7 444.3 cm-1波数附近TCF算法透射谱拟合结果; (f) 7 185.6 cm-1波数附近TCF算法透射谱拟合结果Fig.3 (a) The baseline fitting results of BALF algorithm near wavenumber of 7 444.3 cm-1; (b) The baseline fitting results of BALF algorithm near wavenumber of 7 185.6 cm-1; (c) The absorption line fitting results of BALF algorithm near wavenumber of 7 444.3 cm-1; (d) The absorption line fitting results of BALF algorithm near wavenumber of 7 185.6 cm-1; (e) The transmission curve fitting results of TCF algorithm near wavenumber of 7 444.3 cm-1; (f) The transmission curve fitting results of TCF algorithm near wavenumber of 7 185.6 cm-1 |
对拟合曲线与测试曲线进行误差分析, 结果如图4所示。 图4(a)和(b)分别为BALF算法在7 444.3和7 185.6 cm-1吸收谱峰处的逐点拟合误差, 可以看到7 444.3 cm-1吸收峰拟合误差约在-30~20 mV之间, 7 185.6 cm-1吸收峰拟合误差约在-15~15 mV之间。 图4(c)和(d)分别为TCF算法在7 444.3和7 185.6 cm-1吸收谱峰处的逐点拟合误差, 可以看到7 444.3 cm-1吸收峰拟合误差约在-20~15 mV之间, 相比BALF算法, 误差峰峰值减小30%。 7 185.6 cm-1吸收峰拟合误差约在-15~10 mV之间, 相比BALF算法误差峰峰值减小16%。 TCF算法逐点拟合误差明显小于BALF算法逐点拟合误差。 分别对不同温度下的测试数据进行拟合分析, 并按第1节中的误差计算公式计算测试曲线与拟合曲线的误差平方和的平均值, 结果如图4(e)所示。 由图可知, 两种拟合算法的拟合误差均随温度增加而增加, 但不同温度下TCF算法拟合误差始终比BALF算法拟合误差小3~6倍。
 | 图4 (a) 7 444.3 cm-1波长附近不同温度下BALF算法逐点拟合误差; (b) 7 185.6 cm-1波长附近不同温度下BALF算法逐点拟合误差; (c) 7 444.3 cm-1波长附近不同温度下TCF算法逐点拟合误差; (d) 7 185.6 cm-1波长附近不同温度下TCF算法逐点拟合误差; (e) 不同温度下BALF和TCF算法拟合误差平方和的平均值Fig.4 (a) The fitting error curve of BALF algorithm near wavenumber of 7 444.3 cm-1 at different temperatures; (b) The fitting error curve of BALF algorithm near wavenumber of 7 185.6 cm-1 at different temperatures; (c) The fitting error curve of TCF algorithm near wavenumber of 7 444.3 cm-1 at different temperatures; (d) The fitting error curve of TCF algorithm near wavenumber of 7 185.6 cm-1 at different temperatures; (e) The averages of the sum of squares of BALF fitting error and TCF fitting error at different temperatures |
利用拟合曲线计算温度, 结果如图5所示。 图5(a)为不同温度下连续100组测试数据的温度计算结果, 可以看到不同温度下, 两种拟合算法计算得到的温度偏差不同, 773和973 K时, 两种算法的计算得到的温度曲线偏差较小, 573和1 173 K时计算得到的温度曲线偏差较大。 分别对两种拟合算法计算得到的100组温度数据取平均, 与实际测试温度对比, 结果如图5(b)所示。 图中红色曲线为实际设定温度值, 蓝色曲线为TCF算法反演温度值, 不同温度下的误差最大值为13 K, 黑色曲线为BALF算法反演温度值, 不同温度下的误差最大值为36 K。 可以看到, 在573~1 173 K的温度范围内, TCF算法的最大温度误差比BAF算法的最大温度误差小约2.7倍。
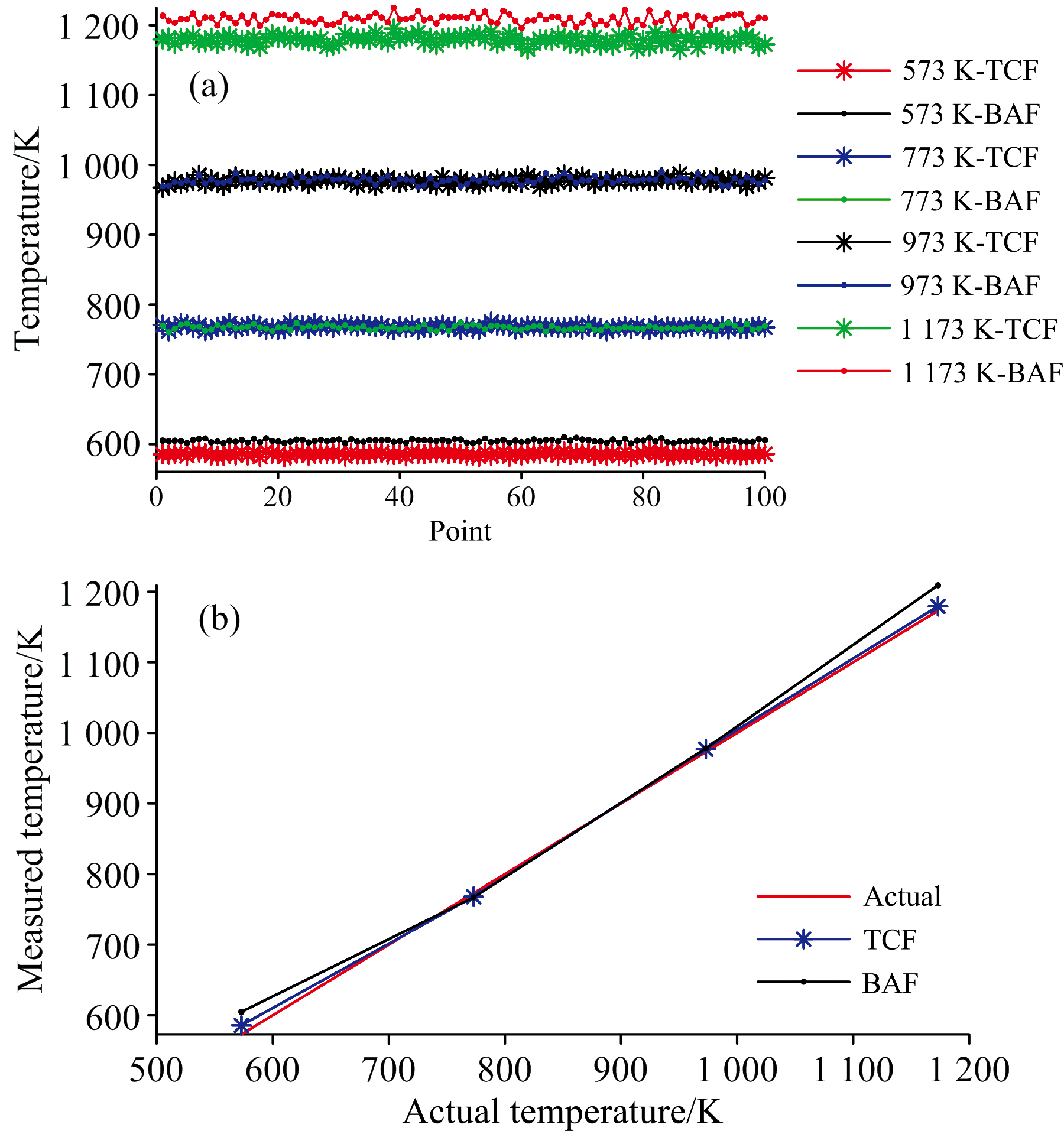 | 图5 (a)两种算法不同温度下连续100组数据的温度计算结果; (b)两种算法反演计算温度与测试温度的对比Fig.5 (a)The temperature analysis results of continuoustest 100 times using two algorithmsat different temperatures; (b) The comparison of analytic temperatures using two algorithms and testing actual temperature |
给测试数据加上不同幅度的噪声信号, 分别利用两种拟合算法计算温度, 结果如图6所示。 图6(a)为给测试信号加上峰峰值为20 mV的噪声信号, 利用两种算法分别计算得到的温度反演结果, 从图中可以看到TCF算法反演得到的温度曲线波动较小, 而BALF算法计算得到的温度曲线波动明显较大。 将噪声信号的峰峰值分别增加到60和100 mV, 分别得到温度计算结果如图6(b)和(c)所示。 从图中可得, 在同样的噪声水平下, TCF算法温度反演计算结果精度更高。 图7(a)是两种算法在不同噪声水平下的温度反演计算结果, 从图中可以直观的看到TCF反演结果受噪声影响更小, 而BALF算法随着噪声的增大温度计算结果误差增加。 当噪声峰峰值为100 mV时, BALF算法温度计算结果的最大误差为107 K, 而TCF算法的最大误差仅为15 K。 图7(b)是两种算法在不同噪声水平下温度计算结果的标准差, 由图可知TCF算法在100 mV噪声水平下的温度检测精度与BALF算法在20 mV噪声水平的温度检测精度相当。 在实验分析设定的不同噪声水平下, BALF算法温度计算结果标准差的最小值约为18 K, 最大值约为313 K, TCF算法温度计算结果标准差的最小值和最大值分别为4和44 K。 分析结果表明, TCF算法具有更强的抗噪声干扰能力, 温度检测精度比BALF算法高约4~8倍。
 | 图6 (a)噪声幅值为20 mV时两种算法的连续反演温度结果; (b)噪声幅值为60 mV时两种算法连续反演温度结果; (c)噪声幅值为100 mV时两种算法连续反演温度结果Fig.6 (a) The temperature analysis results of two algorithms when the level of noise is 20 mV; (b) The temperature analysis results of two algorithms when the level of noise is 60 mV; (c) The temperature analysis results of two algorithms when the level of noise is 100 mV |
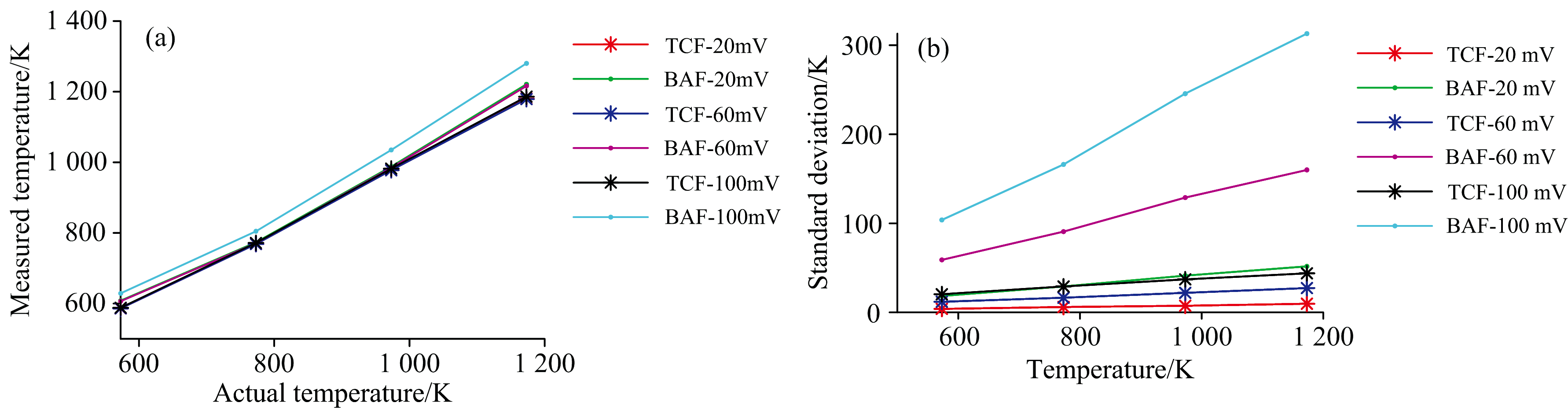 | 图7 (a)不同噪声水平下两种算法温度反演结果的平均值; (b)不同噪声水平下两种算法不同温度反演结果的标准差Fig.7 The temperature analysis results and standard deviation of BALF and TCF algorithms at different levels of noise; (a) The averages of temperature analysis results using two algorithms at different level of noise; (b) The standard deviation of temperature analysis results using two algorithms at different levels of noise |
通过分析TLDAS温度反演算法, 提出了一种基于透射曲线拟合求解的温度检测算法, 搭建了基于TLDAS技术的温度测试分析系统, 对比分析了TCF算法和BALF算法的计算结果。 实验分析结果表明, 对于水汽在7 444.3和7 185.6 cm-1处的吸收谱线, 通过对拟合求解区域的选择可以灵活地避开干扰吸收谱线的影响, 实现对吸收谱线的单峰拟合求解, 进一步实现对温度的准确检测。 本文提出的TCF算法利用迭代拟合求解算法有效地提高了激光器功率基线的拟合精度, 减小了BALF算法基线拟合点数过少导致的基线求解误差, 提高了积分吸光度求解的准确性。 另外通过分析TCF算法在不同噪声水平下的温度反演结果表明, TCF算法相比BALF算法温度计算精度更高, 抗噪声干扰能力更强, 更适用于复杂的现场应用环境。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|