







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
面向目标检测的视觉注意机制波段选择研究
[杨桄1  , 金椿柏
, 金椿柏1 , 任春颖2, * , 刘文婧1 , 陈强1 ]
, 金椿柏, 刘文婧|
|


作者简介: 杨 桄, 1975年生, 空军航空大学教授 e-mail: yg2599@126.com
近年来, 波段选择在高光谱图像降维处理中得到了广泛地应用, 然而常用的数据降维方法并没能将与人类视觉系统相关的信息进行有效利用, 如果将人类与生俱来的视觉注意机制能力应用到高光谱图像中目标的视觉显著性特征的增强或识别, 对于高光谱图像的目标检测研究无疑会产生相当的促进作用。 研究提出引入视觉注意机制理论应用于波段选择研究, 构建面向目标检测应用的视觉注意机制波段选择模型。 通过分析计算波段图幅的目标与背景的可识别程度, 量化所在波段对地物目标与背景的判别能力, 提出了基于目标视觉可识别度的波段选择方法; 利用LC显著性算法进行空间域的视觉显著性目标分析, 计算背景与目标的显著性差异绝对值, 提出基于LC显著目标结构分布的波段选择方法。 将这两种方法结合提出的改进子空间划分方法, 建立面向目标检测的视觉注意机制波段选择模型, 并经高光谱遥感AVIRIS San Diego公开数据集进行目标检测实验验证, 结果表明所提出的基于视觉注意机制的波段选择模型对于目标检测应用具有较好的检测效果, 实现了数据降维和高效的计算处理。
In recent years, band selection has been widely used in hyperspectral image dimensionality reduction processing. However, the commonly used data dimensionality reduction methods have not effectively utilized the information related to the human visual system. The research on target detection of hyperspectral images will undoubtedly have a considerable role in promoting. This paper proposes to apply the theory of visual attention mechanism to the study of band selection and constructs a band selection model of visual attention mechanism for target detection applications. By analyzing and calculating the identifiability of the target and background in the band map and quantifying the discrimination ability of the band to the ground object target and background, a band selection method based on the target visual identifiability is proposed. The LC saliency algorithm is used to analyze the visual saliency targets in the spatial domain, calculate the absolute value of the significance difference between the background and the target, and propose a band selection method based on the structural distribution of LC saliency targets. These two methods are combined with the improved subspace partition method proposed to establish a band selection model of visual attention mechanism for target detection. The model is verified by target detection experiments on hyperspectral remote sensing AVIRIS San Diego public dataset. The results show that the proposed band selection model based on the visual attention mechanism has a good detection effect for target detection applications and realizes data reduction and efficient computing processing.
高光谱成像技术作为一项新兴技术手段, 为地学遥感应用研究和计算机视觉处理算法提供了巨大的机遇, 高光谱成像的优势具体体现在电磁波谱域的高分辨率和宽范围, 能够反映出物体材料的固有特性[1]。 随着遥感的实践应用领域越来越广泛、 研究内容精细程度越来越高, 处理与分析遥感图像的过程中, 对于地物分辨能力呈现出越来越高的需求。
人类视觉注意力有助于我们快速定位图像或场景中最重要的信息[2], 一般认为, 图像中的“ 显著” 区域比图像的其他部分更容易引起注意, 术语显著性描述了图像中视觉上感兴趣的区域, 因此通常用作基于内容的图像索引和检索技术。 显著性检测模型模拟视觉注意机制来解释给定场景, 具有广泛的实用价值[3], 视觉注意建模正是研究人类对给定场景的视觉解释, 即哪些对象或特征会率先引起视觉的注意, 这一概念就与视觉系统中对目标显著性的分析密切相关。 利用显著性检测方法对高光谱图像进行处理, 可以快速获得感兴趣区域。 同时, 利用显著目标的光谱信息为显著目标的检测提供更有用的信息。 近年来, 一些研究人员将显著性模型应用于高光谱图像的目标检测, 取得了良好的效果。 一些研究已经证明, 使用高光谱图像提供的特殊特征可以提高显著性目标检测的准确性, 这些模型大多基于Itti模型的扩展。 Itti等[4]提出了一个通用的视觉注意模型, 计算得到显著性图, 其目的是预测特定场景下的人类注视区块聚集簇。 该模型涉及三个主要特征通道的中心环绕比较和组合, 即颜色、 强度和方向, 是从彩色图像计算显著性图的方法中最有影响力的工作之一。 Le Moan等[5]提出了一种基于显著性的自动识别感兴趣对象的方法, 以增强降维过程中前景和背景之间的分离, 提出将波段分为三组, 每组分别处理, 得到RGB图像。 Cao等[6]提出了一种在高光谱图像中检测目标的方法, 通过扩展Itti的模型来计算高光谱图像中的显著目标。 它使用四种不同的特征得到四个特征图, 然后将它们相加得到一个显著性图, 以获得更稳健的结果。 该方法更适用于高维反射矢量。 文献[7]提出了一种基于区域对比度的视觉显著性区域检测算法。 该方法同时考虑全局对比度和空间相干性, 并且算法简单、 高效, 可以产生全分辨率的显著性图, 检测结果具有更高的精度和更好的召回率, 明显优于现有视觉显著性检测方法。 Kadir等[8]观察到显著性、 尺度选择和图像内容描述之间存在内在联系。 显著性波段可以描述尽可能多的对象, 这也意味着显著性波段中会有尽可能多关于地物目标的信息。 Liang等[9]通过将HSI转换为三色图像, 将Itti模型应用于三色图像, 将研究重点放在三个显著波段的选取, 进而实现高光谱数据与显著目标检测相结合。 Su等[10]提出将具有某些属性的预期带被定义为显著带, 然后显著条带选择问题转化为基于显著性、 尺度和图像描述具有内在联系的思想的尺度选择问题。
基于以上研究理论, 限于高光谱数据信息的冗余与重叠, 全波段数据难以提供有利于目标、 背景分离的度量信息, 使用所有波段进行实验操作不是区分在光谱范围内具有非常相似识别特征的最优方法。 本文立足于不同种类的物体(或同一物体的不同状态)对太阳光谱辐照度有不同的反射特性, 挑选光谱内某些关键波长范围区间足以清楚地区分目标与背景的特殊波段。 选择所有条带中目标与背景响应差异最明显的条带, 使得获取的两个或多个包含不同高光谱特征的光谱波段可以提供等同于甚至优于全波段级别的特征信息。
不同种类的物体(或同一物体的不同状态)对太阳光谱辐照度有不同的反射特性, 即使某两个或多个物体在人眼中呈现的外表形态非常相似, 挑选光谱的某些关键波长范围区间就足以清楚地区分这两个物体。 如果称某个波段是显著的, 即代表着它可以描述一些物体的特征, 具有代表波段表征物体较强的波段响应能力。 选择相邻条带中响应较高的条带, 所获取的两个或多个包含不同高光谱特征的相同光谱波段可以提供等同于甚至优于全波段级别的特征信息。 这是由于信息的冗余与重叠, 全波段数据难以提供最大有利于目标、 背景分离的度量信息, 使用所有波段进行实验操作不是区分在光谱范围内具有非常相似识别特征的最优方法。
利用模仿人眼亮度信息感知能力建立的目标识别度模型, 面向目标与背景的视觉亮度信息感知差异分析, 构建基于目标视觉可识别度的波段选择(band selection based on target visual recognizability, TVR_BS)方法; 选取LC视觉显著性算法进行改进和集成化, 建立面向目标检测的LC显著性算法波段选择模型, 依据其度量波段差异描述子方法将其命名为基于LC显著目标结构分布的波段选择(band selection based on LC significant target structure distribution, LCSTSD_BS)方法, 与大多数现有的基于图像的波段选择技术不同, 前者用于波段幅图中特有目标反射像元灰度值特性, 后者用于波段图像中的目标反射特征表现出的目标分布特征要素, 二者关注光谱波段的目标判别性。 并且利用AVIRIS San Diego公开数据集和野外场地绿色植被类材料的实验数据集进行目标检测实验进行波段选择效果验证。
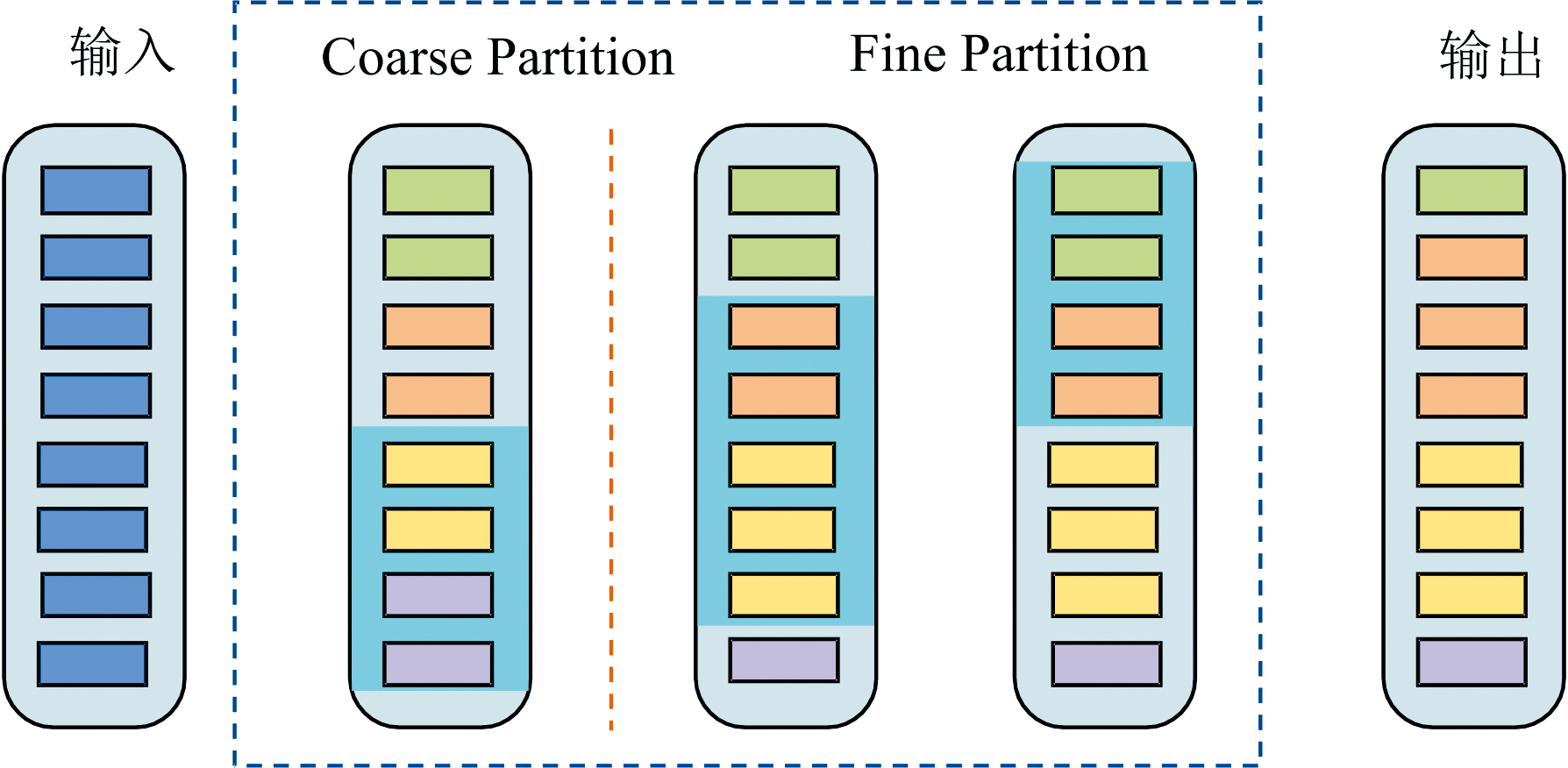
本文为波段选择过程中尽可能避免波段信息重复, 提取光谱数据中所含信息差距大的波段, 提出改进的子空间划分方法, 将数据分成若干区块, 随后在区块内对目标地物显著性程度进行层次分析, 使得到的结果子集具有较低的相似性和较丰富的代表性信息, 具有对于目标检测体现较强显著性的作用。 研究过程框架结构如图1所示。
 | 图1 算法流程示意图Fig.1 Schematic diagram of algorithm flow |
基于连续波段相关性高这一高光谱数据特性, 在适当区间内, 连续的波段可被划分为同一空间子集, 这种先聚类再分组的方法被称为子空间划分。 本文所使用的子空间划分方法的主要特点是利用基于波段相关性聚类划分成多个空间块的方法和目标视觉显著性波段优先级排序的优点, 选择相关性较低、 目标识别判别信息较多的波段子集。 因此, 为了将有序的高光谱波段划分为几个内部相关性较低的子空间块, 本节受自适应子空间划分波段选择方法(adaptive subspace partition band selection, ASPBS)启发, 利用相邻波段相关性变化确定准确的空间子集的有效边界。 下面首先简要介绍自适应子空间划分, 然后提出本研究解决子空间划分有效边界的方法细节。
1.1.1 自适应子空间划分
传统的自适应子空间划分方法[11], 第一步粗子空间划分(coarse partition), 为了更快地完成波段聚类, 根据所选波段的数量, 将高光谱图像立方体按相等的宽度划分为有限的子立方体。 每个子立方的条带数目等于总的波段数除以所选波段数。 第二步细子空间化分(fine partition), 将每个空间波段的像素矩阵被拉伸为一维向量, 然后利用欧几里得距离构造任意两个波段之间的相似矩阵, 通过最大化类间距离与类内距离的比率来获得最终的聚类结果。
其中, 由于光谱数据中相对位置距离远的两个子空间之间的相关性小, 考虑两个相邻子立方体之间的关系即可。 选择最大距离作为衡量两个类间关系的标准。 设定一个分割点以相同的方式, 不断迭代更新初始点, 以获得最终的分割点。 这种划分方法可以使获得的子立方体之间的相关性较低, 从而可以有效地避免选择冗余频带。
1.1.2 相关性子空间划分
传统的自适应子空间算法使用波段间欧几里得距离评价波段关系, 本研究采用波段间的相关性作为评价指标, 并将相关性进行可视化处理, 使其划分过程更加形象。 研究同样采取两次划分, 即粗子空间— 细子空间划分的方式。
第一步, 粗子空间划分, 为了率先确定波段之间的相关性分布情况, 采用波段相关性可视化进行粗子空间数量的确定, 波段间的相关系数计算如式(1)所示。
式(1)中, fi为第i个波段的像素值,
利用得到的相关系数矩阵进行可视化得到相关系数热力图, 将全部波段进行视觉粗划分得到粗子空间数目和子空间分布边界区间, 选取一个起始点。
第二步, 细子空间划分, 依据波段间的全局相关系数曲线图, 将波段进行变化检测阈值选取并不断迭代, 可以得到众多空间相关系数变化率最大的统计区间。 经曲线求导变化率, 不断带入新值、 累加, 并搜索累加得到的最大值。 将此数值设定为分割点位, 即为最终波段子空间分割位点。 据分割位点将波段相关系数矩阵图像进行二值化处理, 即可自动确定高光谱数据确定的精确细子空间边界, 最后得到划分好的子空间划分结果。
本研究所使用的相关性子空间划分方法, 主要特点是利用基于波段相关性聚类划分成多个空间块的方法和目标视觉显著性波段优先级排序的优点, 有助于选择相关性较低、 对目标判别信息较多的波段子集。
使用图像亮度信息法揭示不同类别地物在同幅波段图像的反射差异特性, 计算所分析波段对不同地物判别分离能力, 即地物可识别度[12]。 本节利用此原理, 在高光谱图像目标检测中进行应用研究, 将前者对不同种类地物的判别与分析, 运用至目标与背景的判别与鉴定。
运用图像亮度信息法所选择的波段的背景亮度均值IB越小, 同时该波段的灰度图像标准差σ i越大, 视觉效果就较好。 经式(3)计算, 可以得到不同地物在各个波段的可识别度值Dt。
式(3)中, 第i波段标准差σ i计算方法如式(4), 标准差值越大代表该波段中的目标与背景的差异越大。
本方法是将地物分析转向为目标与背景分析, 以达到提取并强化目标与背景的光谱特性差异的目的。 通过设计模仿人眼视觉模型描述对象在图像中的突出程度, 将含有待检测目标的波段图幅, 经视觉可识别度模型算法计算待检测目标所在波段图幅的目标与背景的可识别程度, 以量化所在波段对地物目标与背景的判别能力, 再结合提出的改进自适应子空间划分方法, 利用以上方法在子空间内实施并得到关于目标判别能力的波段优先级序列, 可将该波段选择方法定义为基于目标视觉可识别度的波段选择(band selection based on target visual recognizability, TVR_BS)方法。
显著性检测的关键思想是中心环绕比较, 也就是说, 如果一个像素或一组像素与其邻域存在某种差异, 那么它就是显著的。 因此, 为了实现这种检测, 需要在图像的空间维度中定义这些“ 中心” 和“ 周围” , 但也需要一种有效的方法来比较它们。 根据多种目标显著性算法的研究对比, 在选取局部对比度(local contrast, LC)[13]算法用于显著性分析并全幅提取视觉显著性目标的应用中, 通过逐像素地计算与灰度图像内其他所有像素在反射值上的距离之和作为该像素的显著值, 如式(5)中SalS(Ik)表示像素Ik的显著值。 据此提取符合视觉接受处理信号特点的单个波段内相对显著目标的像素集合S, 称之为显著性图。
式(5)中, Ii的值在[0, 255]的范围内, ‖ · ‖ 表示颜色值之间的距离度量。 等式扩展为式(6)形式,
式(6)中, N是图像中的像素总数。 鉴于输入图像, 每个像素的颜色值是已知的。 令Ik=am, 得到如式(7)
式(7)中, fn是图像中像素值an的频率。 这频率以直方图的形式表示。 由于n∈ [0, 255], 颜色距离度‖ am-an‖ 也限定在[0, 255]的范围。 由于这是一个固定的范围, 所以距离映射D可以在显著性图计算。 在此映射中, 元素D(m, n)=‖ ax-ay‖ 是X和Y之间的色差。 给定直方图f(· )和色彩距离图D(· , · ), 一个像素Ik的显著性值计算如式(8)
计算所有图像像素的显著性值, 只有颜色{ai, i=0, …, 255}的显著性值, 符合直方图中目标与背景的分布, 才是生成最终显著性映射所必需的, 保留显著性像素的集合即显著性图Sk。
在面向目标检测的波段选择应用, 所选择波段对目标应具备明显的反射特征值, 为了更加全面地利用包含目标地物信息的图像, 本文提出利用图像间的结构相似度(structural similarity, SSIM), 同待检测目标的地面真值进行逐波段近似性计算, 如式(9)。 计算所得到的目标显著图和地面真值参照在每个位置上的差异, 在该位置上从两张图中各取一个区域的像素。 在具体的计算方面, SSIM可以更敏锐地描述两个图像之间的局部结构差异, 由亮度、 对比度、 结构三个维度组成, 亮度对应于均值, 对比度对应于方差或标准差, 结构对应于余弦相似度。
输入两张图像分别为显著性图Sk和地面真值图G, 其中C1和C2是防止分母过小的常量, 而
波段的显著性定义如式(10), 描述了第i个波段图像中的目标t与背景b的像素显著性对比度, 将波段依据目标的显著性提出度量波段显著性的值OSi进行排序, 随后在各子空间中由大到小降序选择波段, 在各子空间中选择波段图幅中目标与背景差异最为明显波段组成结果子集。
在子空间划分步骤中, 利用前文提到的改进自适应子空间划分方法, 在各子空间中利用上述过程计算波段优先级序列, 可将该波段选择方法定义为基于LC显著目标结构分布的波段选择(band selection based on LC significant target structure distribution, LCSTSD_BS)方法。
在该方法中, LC算法提供对光谱图像波段内的像素局部分析, 生成对应光谱波段的目标显著图, 光谱波段的视觉显著图提供了在可视化相关应用中有价值的信息, 此类信息满足了视觉注意的应用范围, 不仅实现了描述哪些目标对象是显著的, 还可以由波段优先级序列表示特定的、 具有判别价值的波长范围区间, 进而提取目标突出的优势波段, 实现增强对目标的检测能力和数据降维, 从而大大提高检测效率和缩短计算时间。
高光谱目标检测通常可以根据待检测目标、 提供已知目标知识的先验目标和具有已知目标光谱特征的后验目标进行分类, 传统的探测器是基于目标和背景光谱的统计信息构建的, 通过细化目标光谱使检测器具有鲁棒性来解决这个问题。
研究选取含有单一背景以及待检测目标为飞机的AVIRIS San Diego数据集进行目标检测实验来验证本文提出的基于视觉注意机制的波段选择方法模型。 实验选用五种高光谱目标检测算法, 分别是自适应相干估计器(adaptive coherence estimator, ACE), 将目标检测视为假设检验问题; 约束能量最小化方法(constrained energy minimization, CEM)和混合调谐目标约束干扰最小化滤波器(mixture tuned target-constrained interference-minimized filter, MTTCIMF), 对目标或背景施加约束, 并构建有限脉冲响应滤波器, 以最小化滤波器的输出能量; 正交子空间投影(orthogonal subspace projection, OSP), 基于子空间的方法抑制背景光谱, 突出目标光谱, 并支持干扰源设计的特征; 光谱角度映射器(spectral angle mapper, SAM), 原理在于测量测试像素的光谱和目标的先验光谱特征之间的“ 距离” 。
实验将通过波段选择方法得到的波段子集经目标检测器识别处理得到的结果, 选取ROC(receiver operating characteristic)曲线和AUC(area under curve)值对其进行精度评价。 本研究通过对不同目标检测算法的应用及选择的波段子集与全波段的结果评价对比, 验证本文所提出的波段选择方法的有效性。
本实验使用的AVIRIS San Diego数据是在美国加利福尼亚州圣地亚哥机场区域采集, AVIRIS(airborne visible infra-red imaging spectrometer)传感器是第一个全光谱范围成像光谱仪, 致力于地球远程测量[14], 其光谱分辨率为10 nm, 光谱覆盖范围为350~2 500 nm, 在去除低信噪比和水汽吸收带后, 共使用189个波段进行实验。 选择两个大小分别97× 59像素和49× 70像素的区域作为测试图像, 并将其分别命名为San Diego1场景图和San Diego2场景图, 前者是机场的一部分。 目标是3架飞机, 背景是建筑物和跑道, 后者是10架小型飞机, 背景是跑道和停机坪。 San Diego1场景和San Diego2场景的真彩色图像和地面真值图分别显示在图2和图3中, 在该数据集中, 飞机被视为要检测的目标。
 | 图2 自适应子空间划分方法Fig.2 Adaptive subspace partition method |
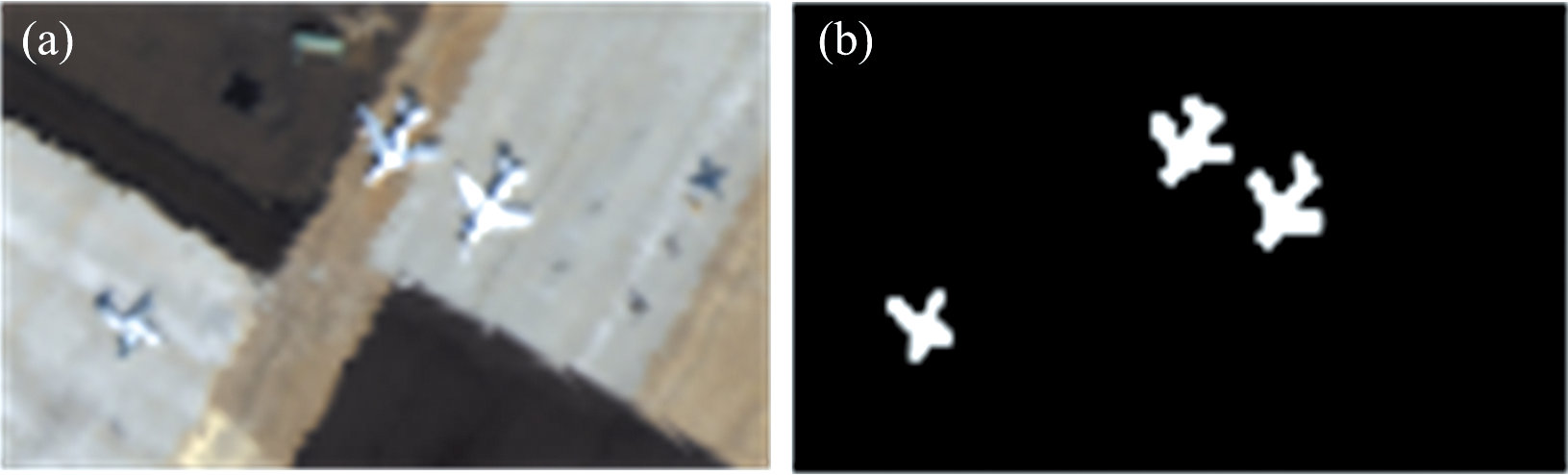 | 图3 San Diego1场景(a)真彩色图(b)目标的地面真值图Fig.3 (a) Ture color image of San Diego1 area; (b) Ground-truth map of the targets |
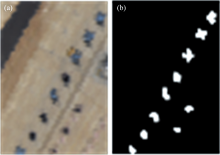
 | 图4 San Diego2场景(a)真彩色图(b)目标的地面真值图Fig.4 (a) Ture color image of San Diego2 area; (b) Ground-truth map of the targets |
2.2.1 波段子空间划分结果
将这两种高光谱图像数据集, 经本文1.1.2所提到的相关性子空间划分方法处理, 第一步计算全波段相关系数并进行可视化处理得到波段相关系数热力图, 以用于波段聚类粗划分, 如图5所示。
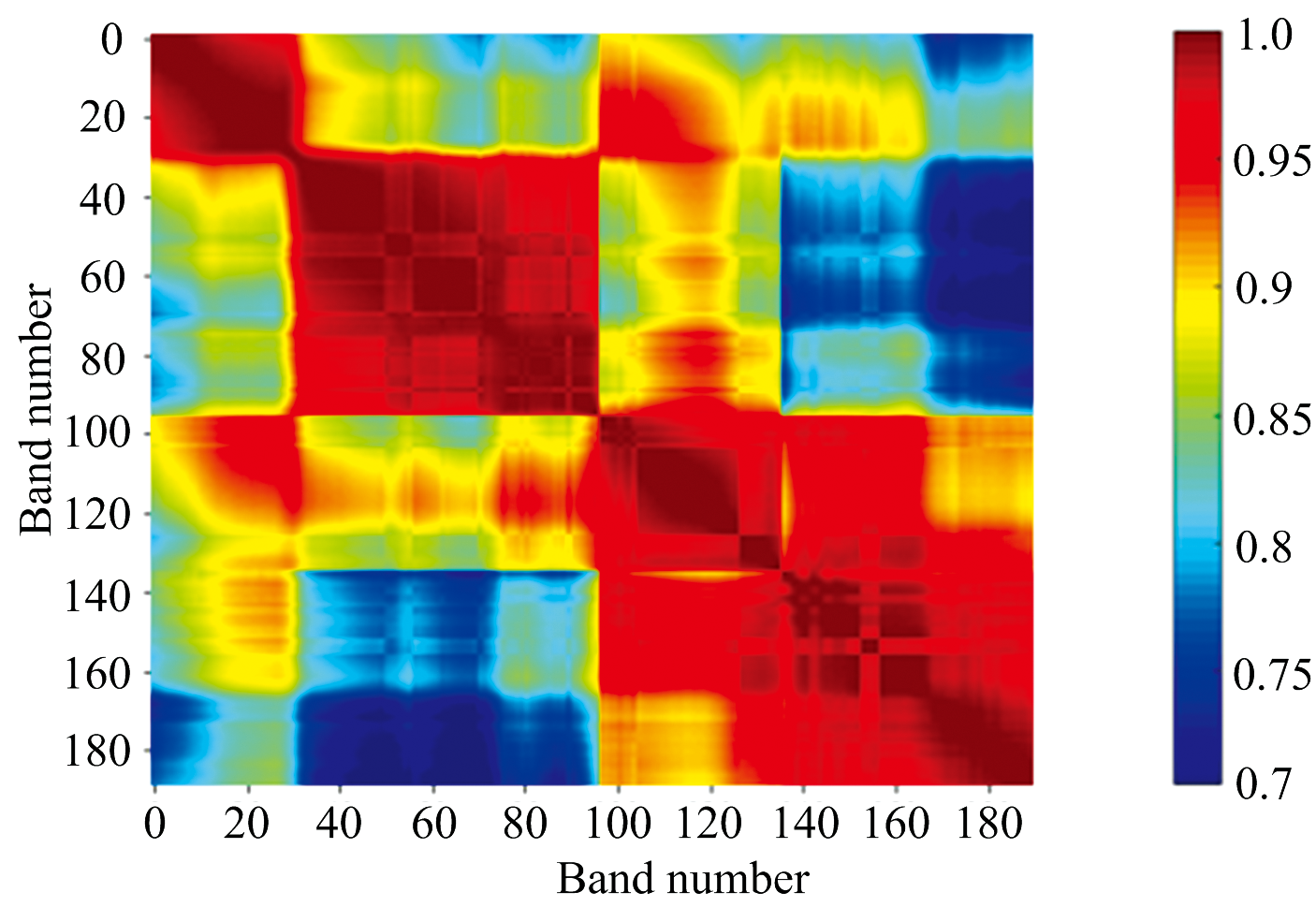 | 图5 高光谱数据波段相关系数热力图Fig.5 Hyperspectral data band correlation coefficient heat map |
接着, 提取粗划分边界前后10个单独波段间相关系数, 利用相关系数变化曲线求导, 并进行累加求和分析, 来确定波段子空间精确分割点位, 单个波段相关系数变化曲线如图6所示。
 | 图6 高光谱数据单波段相关系数变化曲线Fig.6 Single-band correlation coefficient curve of hyperspectral data |
将实验所使用的高光谱数据经以上过程计算得到划分好的波段子空间如表1所示, 两种数据均被分成了五个子空间。
| 表1 波段子空间划分结果 Table 1 Division results of wave segment subspace |
2.2.2 波段选择结果
经波段选择得到的各子空间取等量数目的波段, 首先在划分好的5个子空间中, 各取一条显著性波段得到表2所示的波段选择结果集合, 以验证波段选择算法的有效性。
| 表2 San Diego数据的波段选择结果 Table 2 Band selection results of San Diego data |
经过子空间内单一波段的算法验证后, 即可将波段选择结果进行扩充, 按照各空间提取数量从总数5波段成倍增加至10波段, 15波段, 20波段, 25波段, 将不同数目的波段集合进行目标检测, 将其结果精度与全波段下的目标检测结果进行对比, 使得将算法的有效性更具说服力地表现。
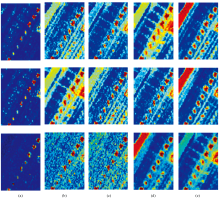
将上面提到的四种含有5个波段的组合分别应用到5种目标检测算法中, San Diego1场景和San Diego2场景得到目标检测结果分别如图7和图8所示, 在两组结果图中的第一行结果图为基于TVR_BS方法得到, 第二行结果图为基于LCSTSD_BS方法得到, 第三行为基于全波段应用得到的目标检测结果图, 从左至右每一列分别是由(a)ACE, (b)CEM, (c)MTTCIMF, (d)OSP和(e)SAM算法得到。
 | 图7 San Diego1场景目标检测结果图Fig.7 Target detection results in San Diego 1 scene |
 | 图8 San Diego2场景目标检测结果图Fig.8 Target detection results in San Diego 2 scene |
针对图8的检测结果可以发现, CEM、 MTTCIMF和OSP算法的检测结果, 在人眼的主观目视观察仍能保持较高的准确度, 优于全波段应用的检测结果, 其中基于TVR_BS方法的结果子集在MTTCIMF目标检出数量最全面, 明显优于全波段结果, 所提出的两种方法在SAM算法上检测目标率较高, 但存在建筑物错误识别成目标的现象, 而在ACE的错误识别像元较少, 但是目标检出数量同样较少。
接着, 将目标检测结果进行精度评价, 得到如图9所示的ROC曲线图, 其中的(a)和(b)分别是基于TVR_BS方法得到的5波段组合在San Diego1场景和San Diego2场景的目标检测结果评价; (c)和(d)是基于LCSTSD_BS方法得到的5波段组合在San Diego1场景和San Diego2场景的目标检测结果评价; (e)和(f)是基于全部波段在San Diego1场景和San Diego2场景的目标检测结果评价。
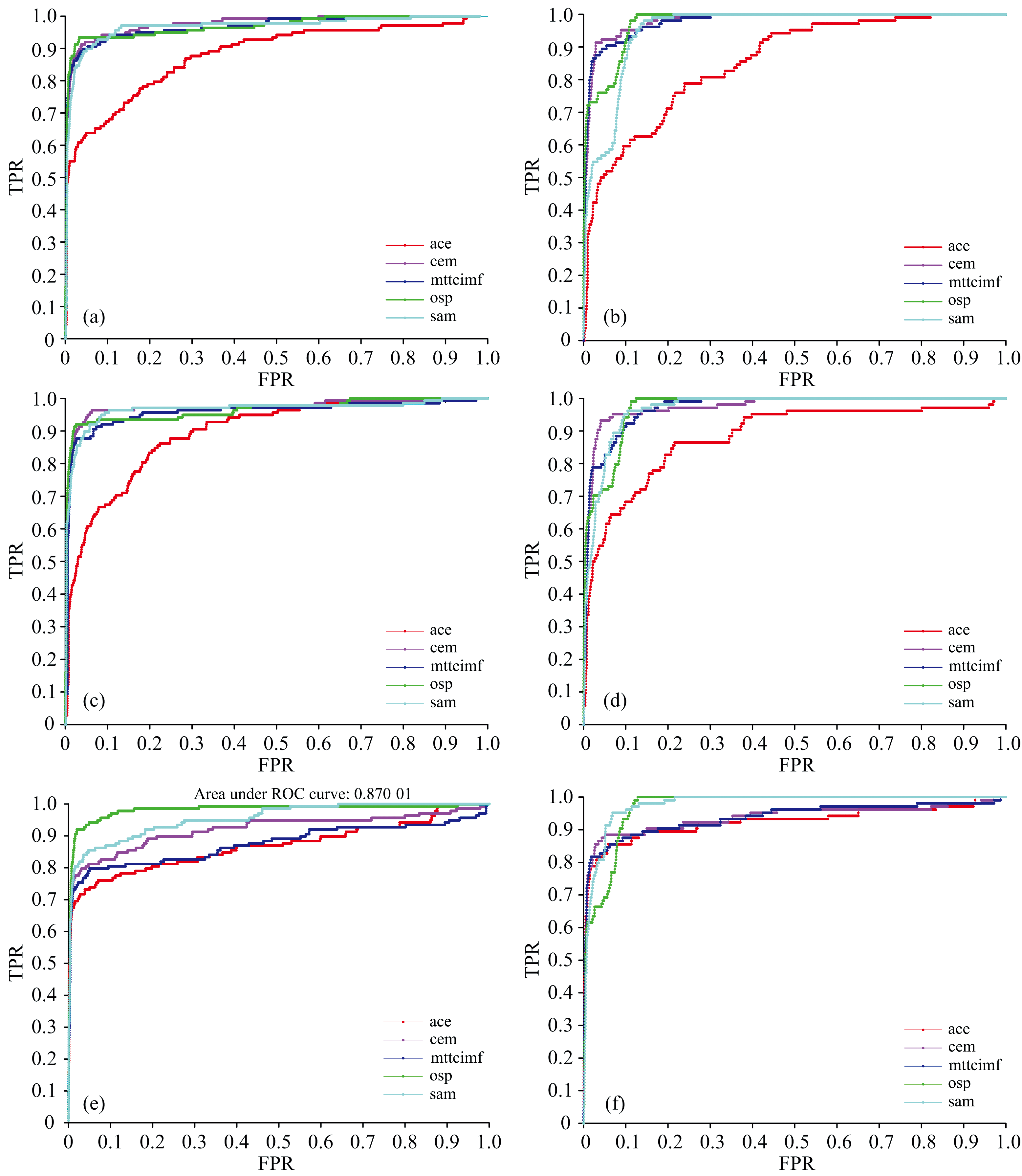 | 图9 San Diego数据目标检测结果ROC曲线图Fig.9 ROC curve of target detection results of San Diego data |
为便于直观了解波段选择算法对目标检测提升的作用程度, 将数目成倍增长后的波段选择组合进行目标检测实验, 进而对结果进行评价与分析, 得到数据丰富的目标检测结果AUC评价指标如图10所示, 其中(a)、 (b)是基于TVR_BS方法得到的波段组合与全波段分别在San Diego1场景和San Diego2场景的检测结果评价AUC值; (c)、 (d)是基于LCSTSD_BS方法得到的波段组合与全波段分别在San Diego1场景和San Diego2场景的检测结果评价AUC值。
 | 图10 San Diego数据不同算法波段组合的目标检测结果AUC值Fig.10 Target detection results (AUC value) of different algorithm band combinations of San Diego data |
通过目标检测结果AUC值普遍高于0.90可以发现, 本文提出的两种基于视觉显著性的算法TVR_BS与LCSTSD_BS在五种目标检测算法中均取得了较好的目标检测效果, 验证了视觉显著性应用于面向目标检测的波段选择方法中的应用, 具有较好的可行性。 其中, 相对于全波段结果来说, 在不同数目波段的比较中, 较少的波段对于目标检测的应用体现了较优异的效果。
本文面向高光谱目标检测实践应用, 引入针对目标进行视觉注意机制处理模型揭示光谱特异性波段从而完成波段的选择。 研究并提出了基于目标视觉可识别度的波段选择(TVR_BS)方法和基于LC显著目标结构分布的波段选择(LCSTSD_BS)方法, 将这两种波段选择方法与改进自适应子空间划分方法结合建立基于视觉注意机制的波段选择模型框架。 并将所提出的算法模型利用单类飞机目标检测场景高光谱数据集进行波段效果验证。 目标检测实验结果表明, 该波段选择模型所检测出的目标结果精度较高, 能够较好地应用于面向目标检测应用的高光谱数据降维处理, 具有较高数据降维能力和实际应用前景, 为快速高效地解译高光谱遥感场景提供了理论方法与应用支持。 未来可将该模型应用于研究任意维度、 任意波长范围的高光谱数据, 将可视化范围内描述对象的显著性, 覆盖在全光谱波长范围内。 使用一系列目标反射特征来提取并输出光谱数据中富含目标特征信息的特异性波段, 可进一步用于包括但不限于目标检测、 图像配准和分割等各种应用。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|