
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于电子顺磁共振谱的残磁测量应用及进展
[张全哲1  , 邹升
, 邹升1 , 张红1, 2, * ]
, 邹升]
|
|


作者简介: 张全哲, 1999年生,北京航空航天大学仪器科学与光电工程学院硕士研究生 e-mail: zhangquanzhe@buaa.edu.cn
电子顺磁共振类似于核磁共振, 是一种基于电子磁矩在外磁场中的顺磁性及塞曼分裂的方法, 该方法与物质中未成对电子和外磁场相联系, 通过获取和分析物质的电子顺磁共振谱, 能够得到物质的结构信息或环境的磁场信息, 因此其常被用来分析物质结构、 探测磁场等。 极弱磁场通常指nT或以下量级的磁场, 目前一些科学研究的进行常常要求在极弱磁环境下进行, 例如基础物理研究、 心脑磁探测等, 因此稳定可靠的磁屏蔽常被用来创建所需的极弱磁环境。 磁屏蔽包括被动磁屏蔽和主动磁补偿, 被动磁屏蔽指利用磁屏蔽室屏蔽外界磁场, 其内部往往有一定量的残余磁场, 因此为方便进一步主动磁补偿, 探测屏蔽后的残余磁场是有必要的。 目前屏蔽室内残余磁场的测量手段主要分为商用化磁强计测量和装置原位测量, 商用化磁强计测量方法简单, 但精度低、 噪声大, 且不利于小型化, 利用装置原位测量能够减少噪声, 是目前主要的研究方法。 由于碱金属原子最外层含有一个未成对电子, 其成为电子顺磁共振实验的理想样品。 而随着激光和光泵技术的发展, 利用法拉第旋光效应作为光学手段探测气体原子的电子顺磁共振谱已经成为了可能。 通过测量碱金属原子气体的电子顺磁共振谱进行残余磁场的原位测量效果好、 精度高, 具有极大的应用前景。 通常基于电子顺磁共振的残磁测量系统包括残磁环境和样品模块、 光学探头模块、 信号调制模块、 环境监测模块以及信号收集与处理模块, 核心是光学探头模块, 决定了磁场测量的灵敏度。 简要描述了电子顺磁共振技术的原理, 以光泵磁力计为主介绍了基于该技术的典型磁力计和目前的发展, 重点概述了基于电子顺磁共振谱的残磁测量系统、 各个组成模块以及相关技术近年来的发展现状。
Electron paramagnetic resonance, which is similar to nuclear magnetic resonance, is a method based on the paramagnetism and Zeeman splitting of electron magnetic moments in an external magnetic field. It is associated with unpaired electrons inside matter and external magnetic fields. Extremely weak magnetic fields are generally defined as those on the order of nT or less. Currently, scientific research is often conducted in extremely weak magnetic environments, such as basic physics research, biomagnetism of the heart and brain, etc. Therefore, stable and reliable magnetic shielding is often used to create the required environment. Magnetic shielding includes passive magnetic shielding and active magnetic compensation. Passive magnetic shielding refers to using a magnetic shielding chamber to shield the external magnetic field, which often has a certain amount of residual magnetic field inside. To facilitate further active magnetic compensation, it is necessary to detect the residual magnetic field inside shielding. At present, the means of measuring the residual magnetic field in the shielding room are mainly divided into commercial magnetometer measurement and in-situ measurement. The commercial magnetometer measurement method is simple, with low accuracy and high noise, and it is not conducive to miniaturization. With low noise, in-situ measurements are the main method of study now. Since the outermost layer of the alkali metal atom contains an unpaired electron, it becomes an ideal sample for electron paramagnetic resonance experiments. With the development of laser and optical pumping, it has been realized to probe the electron paramagnetic resonance spectrum of alkali metal atoms by Faraday rotation. The in-situ measurement of residual magnetic fields by related electron paramagnetic resonance spectrum of alkali metal vapor is profitable and precise and has great promise for application. Usually, the electron paramagnetic resonance-based residual magnetometry system includes the residual magnetic environment and sample module, the optical probe module, the signal modulation module, the environmental monitoring module, and the data acquisition and procession module, with the core being the optical probe module, which determines the sensitivity of the magnetic field measurement. This paper briefly describes the principle of the electron paramagnetic resonance technique, introduces typical magnetometers based on this technique and current developments with a focus on optically-pumped magnetometers, and outlines the residual magnetometry system based on electron paramagnetic resonance spectroscopy, each component module and the current development of related technologies in recent years.
电子顺磁共振(electron paramagnetic resonance, EPR), 由苏联学者Zavoisky在喀山国立大学首次发现, 很快发展为研究具有未成对电子物质的方法。 电子顺磁共振是磁共振的一种, 利用了电子的共振和顺磁性, 由于原子中每个电子对的两个电子自旋态总是相反, 因而仅具有未成对电子的原子才能显示共振特性。 EPR信号的来源是电子对能量的吸收或释放, 当物质处于外磁场中, 由于塞曼效应产生能级分裂, 而分裂后的两条相邻能极间距Δ E=gμ BB, 若将该物质暴露在一定频率的微波中, 当满足微波能量与裂距对应能量相等, 即hν =gμ BB时, 自由电子将通过吸收或释放能量的方式在两能级间移动, 宏观上产生一个吸收值, 进而转换得到光谱。 随着EPR及相关技术的发展, 根据EPR基本公式hν =gμ BB, 已经形成了基于EPR的电子顺磁共振谱仪和原子磁力仪, 电子顺磁共振谱仪是固定加载在样品上的微波频率、 改变磁场大小寻找共振点, 得到共振谱线, 从而获取样品的g因子信息, 主要用于分析材料组成和性质; 而原子磁力仪则通过在样品中加载已知频率的电磁波观察样品的吸收情况, 从而探测磁场的幅值[1]。
磁场是人们生活中普遍存在的一种能量场, 磁场测量在各个领域都有极大的价值, 例如军事上的反潜和导航、 医学上的心脑磁、 地理上的地震预警、 化学上的物质组成分析等。 随着技术的进步, 磁强计的发展让极弱磁场的探测成为可能, 从过去的磁通门磁强计、 磁电阻传感器到超导量子干涉仪、 原子磁强计, 磁场测量的范围已经从mT到fT, 甚至向aT量级发展。 由于地磁场在地表的强度约0.05~0.06 mT[1], 在一些磁测量实验中, 需要探测的磁场强度往往远低于地磁场, 因此在进行此类实验时需要将地磁场以及人为产生的干扰磁场做屏蔽处理。 磁屏蔽通常利用多层磁屏蔽桶屏蔽外磁场, 使桶内磁场在一个较低的水平, 此时仍然存在一定量级的磁场(~nT), 称为残余磁场, 而针对一些特殊和精密的科学研究及测量, 残余磁场的存在对最终测量结果产生较大的噪声。 对残余磁场的测量一方面能够得到磁屏蔽室内的磁场矢量大小和方向, 便于通过磁补偿进一步做消磁处理, 逼近“ 零磁环境” , 从而更有利于探测微弱信号, 例如人体的心脑磁信号; 另一方面能够直接衡量磁屏蔽室的优劣, 根据不同的应用选择不同的屏蔽层数, 从而在生产中减少成本; 因此, 研究残磁测量具有重要的意义。 残磁测量对于磁测量是一个精密的范畴, 对于目前广泛应用的磁传感器来说, 不仅体积较大, 而且会引入新的噪声, 而残磁环境下极低的磁噪声都会对精密测量产生干扰。 目前针对屏蔽环境下的残余微弱磁场, 采用原子或电子自旋传感的测量方法得到了广泛的研究, 其中, 利用EPR的残磁测量方法以其精度较高、 装置简单、 便于集成等优点具有广阔的研究前景。
电子顺磁共振原理和技术自发现以来经不断研究, 出现了众多磁力计。 在电子顺磁共振中, 根据相邻能级上粒子的玻尔兹曼分布, 与微波或射频共振联系的能级差很小, 则能级间分布的粒子数之差很小, 因而探测到的共振信号很弱。 对于凝聚态物质, 样品的浓度较大, 可以获得很好的磁共振信号, 而对于气态物质, 则磁共振信号微弱、 难以探测。 自20世纪Kastler提出了光抽运技术, Bitter提出了光检测磁共振技术后, 磁共振信号的探测难度大大降低, 这不仅提高了EPR测量的精度, 更大大扩展了其应用场景。
在光抽运发展之前, 电子顺磁共振依靠强磁场极化工作物质, 在光抽运得到应用之后, 出现了以磁共振为探测手段的各类磁力计, 如双共振原子磁力计、 Mx磁力计、 Mz磁力计、 电子顺磁共振磁力计等。
 | 图1 典型EPR原理框图Fig.1 Typical functional block diagram of EPR |
光泵磁强计[2], 是利用光抽运和检测技术, 根据磁共振探测磁场的一种磁强计, 在实际实验中根据检测共振信号的方式的不同又分为Mz型磁强计和Mx型磁强计。
Mz型检测了与磁矩纵向分量相关的信号, 得到的是磁共振的吸收曲线, 测量准确, 探头体积较小。 Schultze等通过螺旋方向相反的高功率圆偏振泵浦光分别照射两个相同的气室测得磁场, 在地磁场下的磁场分辨率低于10 fT· Hz-1/2 [3]。 Oelsner等利用MEMS技术研制了一种LSD-Mz模式的便携式光泵磁力计, 测量的白噪声极限仅为140 fT· Hz-1/2 [4]。
Mx型检测了与磁矩横向分量相关的信号, 得到的是自由感应衰减信号, 响应速度快, 但精度更低。 Bison等利用锁相的Mx模式激光光泵磁强计在屏蔽室内探测了心磁信号, 并绘制了信号的二维图[5]。 Groeger等利用一个高灵敏度的Mx磁力计在寻找中子永久电偶极矩实验中控制和稳定波动的磁场及梯度, 得到的噪声等效磁通密度仅为15 fT[6]。 文献[7]提出了一种双光束探测的Mx型磁力计, 无需引入额外的磁场, 实现了0.02 nT的绝对测量精度。 Ranjbaran等利用方波代替正弦波振荡磁场, 通过探测磁共振的高次谐波提高测量的灵敏度, 实验证明占空比为10%方波的第五次谐波的检测磁场将磁强计的灵敏度提高了4.5倍[8]。 Soheilian等将Mx磁力计测量磁场梯度用于磁性物体的追踪定位, 测速的精度达到40 μ m· s-1, 将有可能用于评估血液流速[9]。 文献[10]通过以数字方式构建锁相环, 无需模拟移相器, 实现了快速变化的磁场中共振信号的数字化测量。 Grujic等提出了一种利用一束弱强度的探测激光记录原子极化的自旋进动信号的方法, 摆脱了振荡磁场, 避免了反馈驱动的系统误差, 实验得到的灵敏度约为200 fT· Hz-1/2 [11]。
近年来, 不断有人在发展Mx、 Mz型磁力计的同时将二者的特点结合并研制新型的光泵磁力计。 Vershovskii等在一个装置中同时集成了Mx、 Mz两个磁力计, 实现了Mx的快速响应和Mz的慢速矫正[12]。 同时, 小型化和微型化也成为了光泵磁力计的发展方向之一。 Alem等利用微加工制作光泵磁力计, 并将25个微加工磁力计组成多通道成像系统, 利用光纤耦合到一个控制单元中, 具有24 fT· Hz-1/2的平均灵敏度[13]。
针对利用EPR进行磁场测量, 北京航空航天大学的团队具有良好的研究基础。 北航Zhang等针对原子磁力计装置中线圈非正交性问题, 在y轴施加直流磁场, 通过求解BLOCH方程拟合出Byx与By的比值, 测得鞍形线圈x轴、 y轴之间的非正交角和波动范围[14]。 同年, 由于自旋极化的碱金属原子可以通过自旋交换光泵使3He气体超极化, 该团队分析和提取超极化3He在外部磁场中的拉莫尔进动变化, 得到了这个磁场的大小, 并校准了三维线圈常数[15]。 同时, 根据原子数密度对原子磁强计灵敏度的巨大影响, 他们通过测量外加直流磁场中的磁共振线宽实时估计出原子数密度[16]。 2019年, 该团队使用全光学原子磁力计, 利用EPR磁场传感技术, 通过分析不同磁场矢量下自旋极化K原子的EPR光谱, 建立了三维线圈常数和非正交角的测量模型, 证明了该方法校准线圈常数和非正交角的有效性[17]。 三年后, 他们在传感系统的基础上开展了基于EPR的残磁测量研究, 以钾原子气室作为敏感元件, 在5层磁屏蔽室内, 通过调制横向交流磁场的频率和纵向磁场的强度, 独立探测了残余磁场的三轴分量[18], 测量的精度30 pT。 该小组在残余磁场测量方面有很好的研究积累, 成功获批国家自然科学基金一项“ 屏蔽环境下残余磁场三轴分量原位高精度测量与补偿方法研究” 。
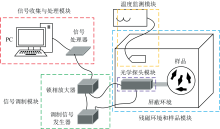
目前基于EPR技术发展的电子顺磁共振谱仪较为成熟, 谱仪通过对样品施加一定频率的微波, 扫描磁场观察吸收谱从而推断样品的组成和性质, 一般的谱仪由电磁场、 谐振腔等组成。 EPR磁场传感系统与电子顺磁共振谱仪系统类似, 可以将其分为五个模块: 残磁环境和样品模块、 光学探头模块、 信号调制模块、 环境监测模块、 信号收集与处理模块。 其中系统的核心部分为光学探头模块, 该模块很大程度上决定了系统测磁的灵敏度。
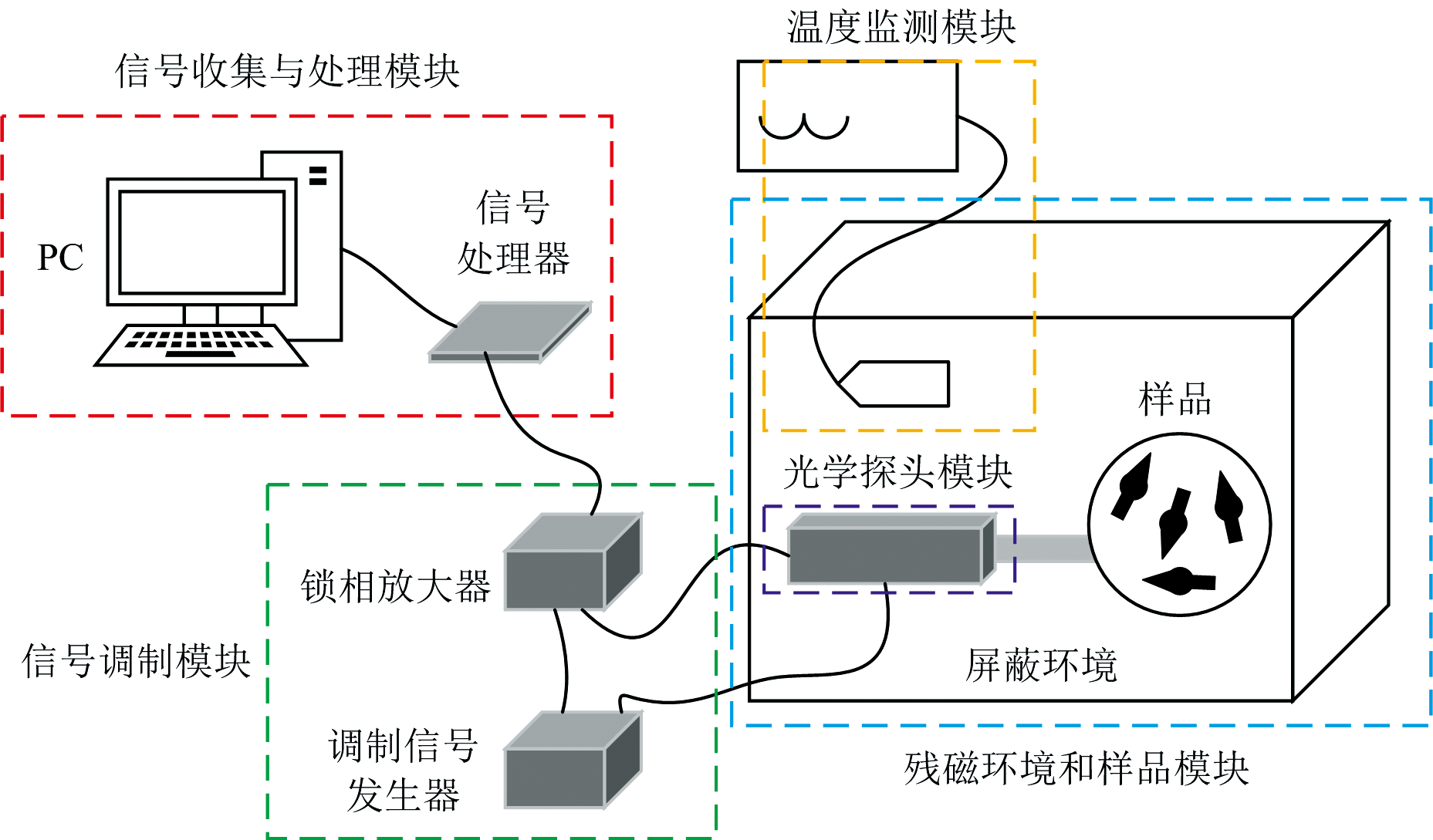 | 图2 磁场传感系统组成Fig.2 Components of magnetic sensing system |
系统测磁的基本过程是由光抽运气室原子, 使其产生一个宏观指向, 此时气室内原子不再吸收抽运光而变得透明, 之后在一旁加上一个射频磁场, 当射频磁场的频率与能级匹配时, 磁共振发生, 一部分原子从高能态回落到低能态, 回落后的原子得以重新吸收泵浦光, 透过气室的光强降低, 直至出现一个极小值点, 通过追踪该点得出磁场内原子的拉莫尔进动频率, 进而得出磁场强度。 磁场传感的核心是得到自旋原子的拉莫尔频率。
2.2.1 残磁环境和样品模块
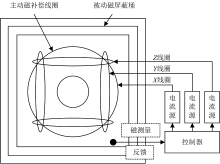
残磁环境是指经磁屏蔽后样品和探头所在的环境, 磁屏蔽主要包括有源主动磁补偿和无源被动磁屏蔽[19]。 有源磁补偿是控制三维线圈, 产生与测得磁场强度相同、 方向相反的磁场矢量, 从而对消内部磁场, 创造近零磁空间。 无源被动磁屏蔽是采用特殊材料引导磁感线, 实现磁屏蔽。 由于磁感线在传播中更易于穿过导磁材料, 因而在被动磁屏蔽的设计中通常使用高导磁率的软磁材料, 如坡莫合金, 利用该类材料制作的磁屏蔽桶可以最大程度上影响磁感线的传导, 从而使桶内的磁场尽可能小, 实际设计中通常采用多层材料逐层屏蔽, 效果较好的屏蔽桶内部剩磁一般在nT量级。 1970年美国MIT的Cohen团队设计了一种三层的步入式磁屏蔽室, 内部中心达到了pT量级的残磁水平, 并通过SQUID实现了人体心脑磁的测量[20]。 1982年Kelha等设计了一个由三个同心的立方体屏蔽罩组成的立方体磁屏蔽室, 内部的剩磁小于5 nT[21]。 2008年Sasada等利用一个循环电流和作为后轭的薄磁板设计了一个磁屏蔽装置, 既能引导磁通不进入目标区域, 又能产生对磁通的排斥力, 实现了5 nT以内的磁屏蔽[22]。 超导磁屏蔽也是一个极有应用前景的技术, 近年来逐渐发展起来。 Masuzawa等通过研究镍铁系合金在室温和低温下的磁特性, 将其作为磁屏蔽材料用于核反应堆主线段的超导空腔[23]。 国内清华大学的Gu等使用两个封闭的高温超导线圈完成了开放式磁屏蔽的实验, 有效隔绝了由电力系统产生的动态噪声, 并将屏蔽后的磁场波动控制在10 nT以内[24]。
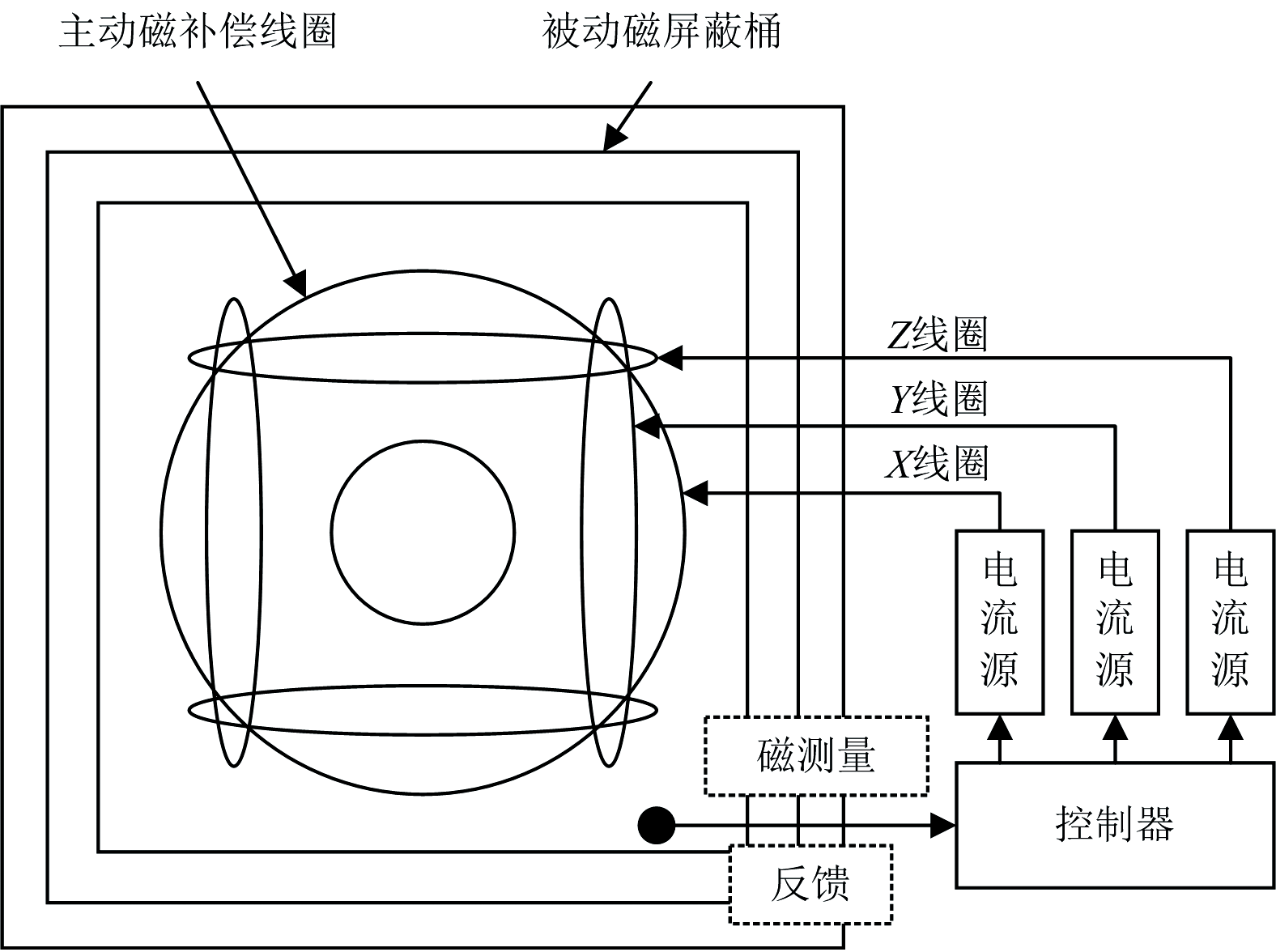 | 图3 磁屏蔽装置Fig.3 Magnetic shielding device |
样品是指用于产生共振信号的物质, 由于最外层只有一个电子, 能够产生较强的顺磁共振信号, 在EPR中经常采用碱金属原子(钾、 铷等)作为样品。 不同的样品会对测磁系统产生不同的影响, 在一定程度上影响了测磁的灵敏度、 绝对精度等。 应用最广的碱金属原子是钾、 铷、 铯, 基于钾原子的磁力计是灵敏度最高的, 其次是铷和铯, 然而由于铯、 铷、 钾的熔点依次提高, 为了实现高灵敏度, 需要的温度也依次提高, 因此在需要高灵敏度时常采用钾原子, 而需要低温测量时常采用铯原子。 Scholts等利用Cs原子气室, 在LN模式下通过抑制自旋交换弛豫使射出噪声限制的灵敏度提高, 在9.3 mm3的体积下实现了42 fT· Hz-1/2的灵敏度[25]。 由于在所有碱性原子中, 钾原子表现出最好的独立分隔的磁共振线, 因而其测量磁场的分辨率可以做到很高, 窄线宽的钾原子Mx模式光泵磁力计被广泛应用[26]。
碱金属原子样品一般可分为单质和混合物。 文献[27]中利用自然丰度的Rb(同时含有87Rb和85Rb两种同位素), 通过双射频法提高了测量灵敏度。 随着混合光泵技术的发展, 两种碱金属蒸气的混合抽运方式提高了测量灵敏度, Ito等利用K-Rb混合气体在10 Hz左右实现了100 fT· Hz-1/2的灵敏度, 在心磁图中得到了较好的效果[28]。 单质同位素作为碱金属原子源价格较为昂贵, 文献[29]中使用高纯度的87Rb设计了具有Mx-Mz双模式的原子磁力计, 并实现了微型化。
2.2.2 光学探头模块
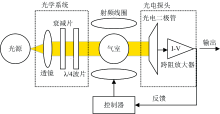
光学探头模块是整个系统的核心, 由光源、 光学系统(准直、 起偏)、 气室、 射频线圈、 加热线圈、 光电探头等组成。 随着微纳加工工艺的成熟, 光学探头逐渐向集成化和微型化方向发展。
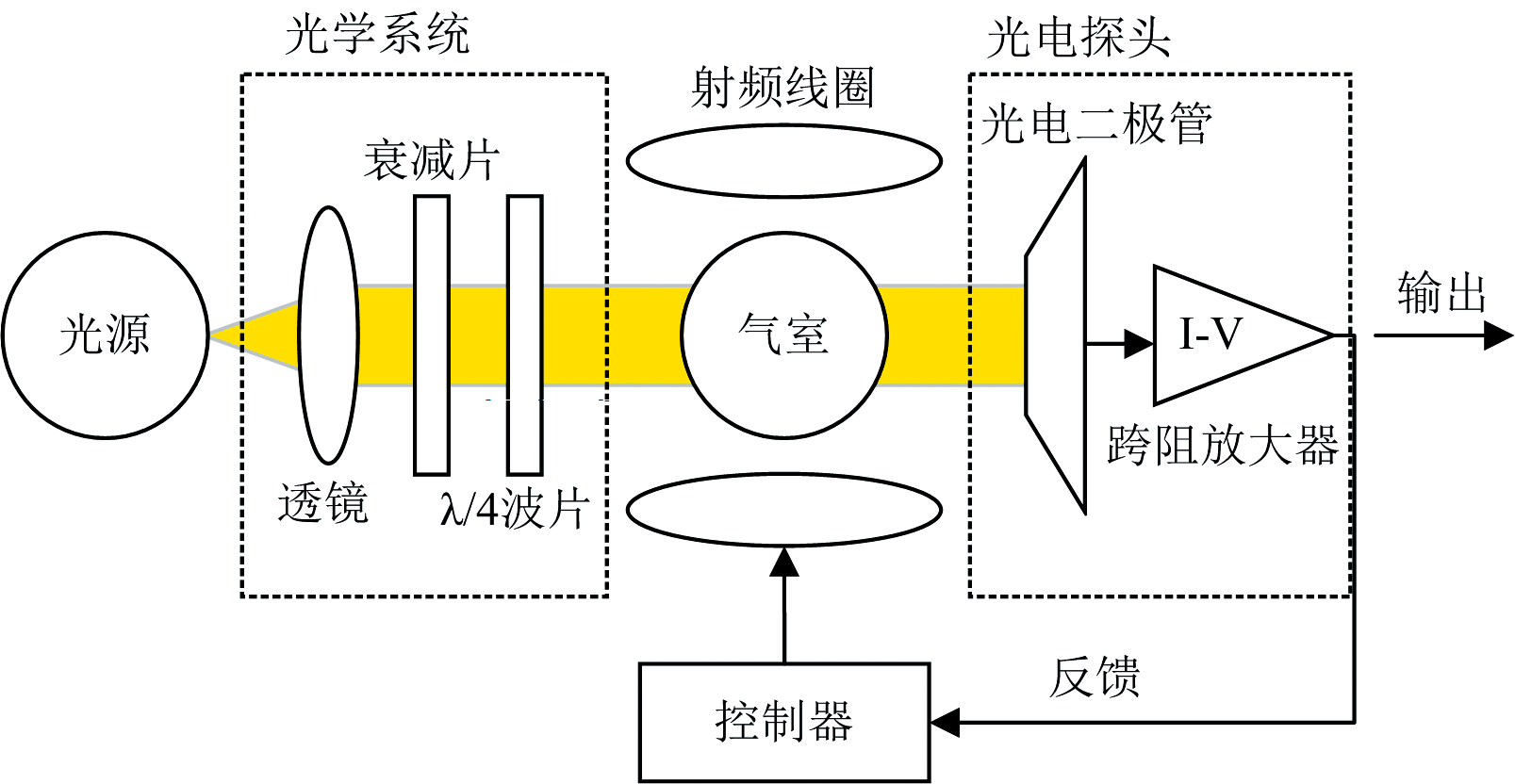 | 图4 光学探头和样品模块组成Fig.4 Optical probe and sample module composition |
光源是发射器的主要部分, 用于产生泵浦光, 将气室中的原子自旋极化, 使原子产生一个宏观指向。 光泵磁强计最早是用与气室内对应碱金属原子跃迁频率的光源进行照射, 近十几年来光源多为激光器。 文献[30]基于Cs原子磁力计对放电灯光源和激光光源进行了对比实验, 得到灵敏度分别为25和15 fT· Hz-1/2。 在实际应用中, 激光器的稳频是十分关键的, 北航Jia等基于小型化的原子磁力计, 将泵浦光的频率稳定在气室原子吸收曲线二阶导数为0的点, 获得最大的响应输出, 相比于稳定在吸收峰, 输出响应提高了40%[31]。 Pradhan等通过调制激光频率得到的解调信号, 将激光频率稳定在Rb原子跃迁附近[32]。 文献[33]中二极管激光器频率和强度噪声通过调制形成闭环控制, 并利用光栅仪进一步抑制。 在有些探头系统中, 除了产生泵浦光的激光器, 还要有产生探测光的激光器, 文献[34]中提出了一种利用电光调制器检测系统的二次谐波的闭环控制方法, 使探测激光的频率漂移被有效减少了约5倍。
光学系统安装在光源之后, 用于光源发射光束的准直和起偏。 气室用于装载样品, 通常在气室中放置部分固体原子, 以保证气室中为饱和气体。 气室的研究在20世纪60年代就已经开始, Bell和Bloom等利用设计的气室加工平台, 制备了壁厚为0.2 mm的球形原子气室[35]。 Schwindt等利用微机电技术, 构造了一个小型化铷原子气室, 并使磁力计的体积只有12 mm3 [36]。 Nieradko等利用硅微加工和阳极键合技术, 通过将一个蚀刻过的硅片密封在两个玻璃片之间制成了晶圆级气室[37]。 Ban等通过使用碱金属源片作为碱金属分配器来制造碱金属气室, 实验证明一些填充K的玻璃气室显示出均匀的磁测量灵敏度, 并因此适用于基于阵列的OPM测量[38]。
射频线圈通过频率扫描, 以便于追踪原子自旋的共振点。 在实际磁场测量中, 由于磁场不是固定不变的, 因此需要利用自动频率控制技术跟踪共振点。 常用的有直流型、 频率调制型、 超外差型、 Pound型自动频率控制技术, 其中直流型无扫频, 稳态误差更大, 而后三种需要扫频, 扫描范围与分辨率呈负相关。 中科大的研究人员提出了一种基于相频关系的自动控制系统, 能够快速响应, 调节波源频率追踪谐振频率。 常用的频率跟踪利用了反馈技术, 而稳频则通常依赖锁相环技术。
加热线圈保证了气室中原子的密度, 使系统在一个较高的灵敏度水平。 光电探头是接收器的重要部分, 用于探测透过气室的光强, 配合射频线圈追踪共振点, 常用的光电探头为光电二极管, 华中科技大学的研究人员采用一种QMC/InSb信号探测系统, 实现了较高频率响应范围的信号探测。 光电探头通常连接一个放大电路, 主要用于将电压放大, 便于更好的测量。
2.2.3 信号调制模块
由于整个系统测量的均为较微弱信号, 有用信息容易被噪声淹没, 导致测量结果不准, 系统中引入调制模块, 用来将微弱的信号提取出来。 调制是用基带信号去控制载波信号的参量变化, 将信息负载到载波信号上传输的过程, 而解调相反, 将负载到载波信号中的信息提取出来。 用于调制的信号由信号调制模块产生, 固定频率的信号分为两路, 一路连入光学探头, 另一路接入锁相放大器, 通过相敏检波将信号提取出来, 能够降低噪声影响。
目前调制方向主要分为轴向和径向。 文献[39]中通过在泵浦光Z轴方向应用一个几千赫兹的振荡磁场调制, 并利用相敏检测提取信号, 大大抑制了空气噪声, 实现了60 fT· Hz-1/2的白噪声水平。 Alem等利用OPM阵列, 在垂直于抽运光方向加一个小的调制磁场, 并检测光电二极管所产生的信号, 成功测量到胎儿心脑磁动图[13]。 北航团队对光泵测磁系统中的光泵强度和纵向、 横向调制进行了研究, 结果证明纵向调制存在一个最佳的泵光强度, 而在弱泵浦光强度下, 横向调制达到的灵敏度更高[40]。
2.2.4 温度监测模块
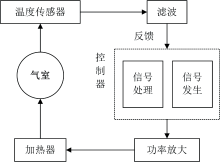
测磁系统的环境监测主要是指温度的监测, 在测磁系统中, 气室中的温度波动会使原子数密度波动, 进而对测量的灵敏度和精度产生影响。 一般实验中通过温度传感器监测气室内温度, 经滤波传入控制器, 利用一定的算法得到控制信号, 经功率放大后操纵加热器, 使气室温度恒定。
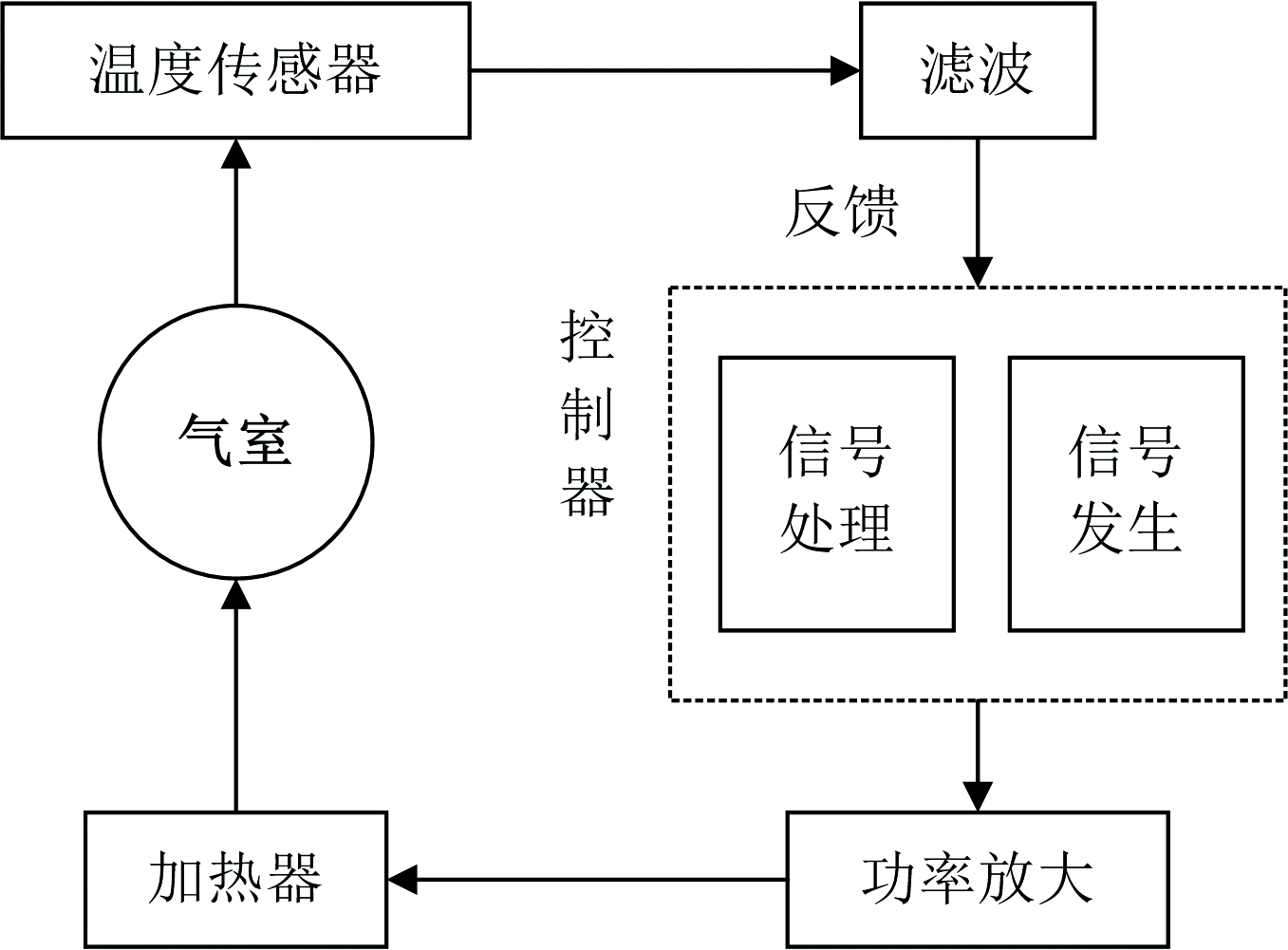 | 图5 温度检测和控制框图Fig.5 Temperature detection and control block diagram |
常用的方法是通过在气室上安装负温度系数的热敏电阻将温度信号转化为电信号, 实现温度监测。 Oelsner等通过将铂金金属电阻粘在气室上进行温度的检测, 并控制加热激光器的电流控制加热温度[4]。 加热器用于加热气室, 使气室内温度维持在一个恒定值, 在一些精度要求不高的实验中普遍采用交流电加热的方法。 Johnson等采用高频交流电加热线圈加热铷原子气室[41], 虽装置简单, 但引入额外噪声。 为了避免该问题, 需采用低噪声线圈或无磁加热的方法。 Kornack等采用双绞线线圈, 其对称结构能有效减少磁噪声[42]。 Shah等通过控制高阻值钛线圈以0.02~0.2 Hz的频率规律开关, 在线圈关闭的时候进行测量, 有效避免了线圈磁场噪声对测量的影响[43]。 Preusser等为了将磁力计微型化, 采用二极管激光器对气室进行无磁加热[44]。 Ledbetter等通过在气室外的两层加热箱中间通入流动的热气流, 实现了无磁加热[45]。
将温度传感器与加热器连接起来组成一个反馈回路的是控制器, 常用的控制方法有PID控制等。 北航Fu等利用PID算法控制气室温度, 实现了± 3 mK的气室温度稳定性[46]。 国防科技大学的许国伟等人设计了一种控制气室温度的光吸收法, 同样采用PID控制加热片加热, 1 h内温漂约为0.02 ℃[47]。 吉林大学王言章等人使用积分分离的PID控制算法消除了超调, 气室温度控制精度达到± 0.02 ℃[48]。 PID算法易于实现、 可靠性高, 但仅适用数学模型能够准确建立的线性时不变系统, 且参数的整定较为繁琐, 模糊数学提供了一种新的控制思路, 利用自适应的PID算法不仅能够使参数自整定, 避免人为调节, 同时能够解决非线性问题[49]。
2.2.5 信号收集与处理模块
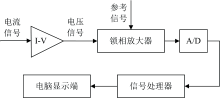
实验信号收集与处理模块用于将探测到的信号进行放大和解调后, 传输到信号处理器, 进而将处理后的数据传入电脑显示端。
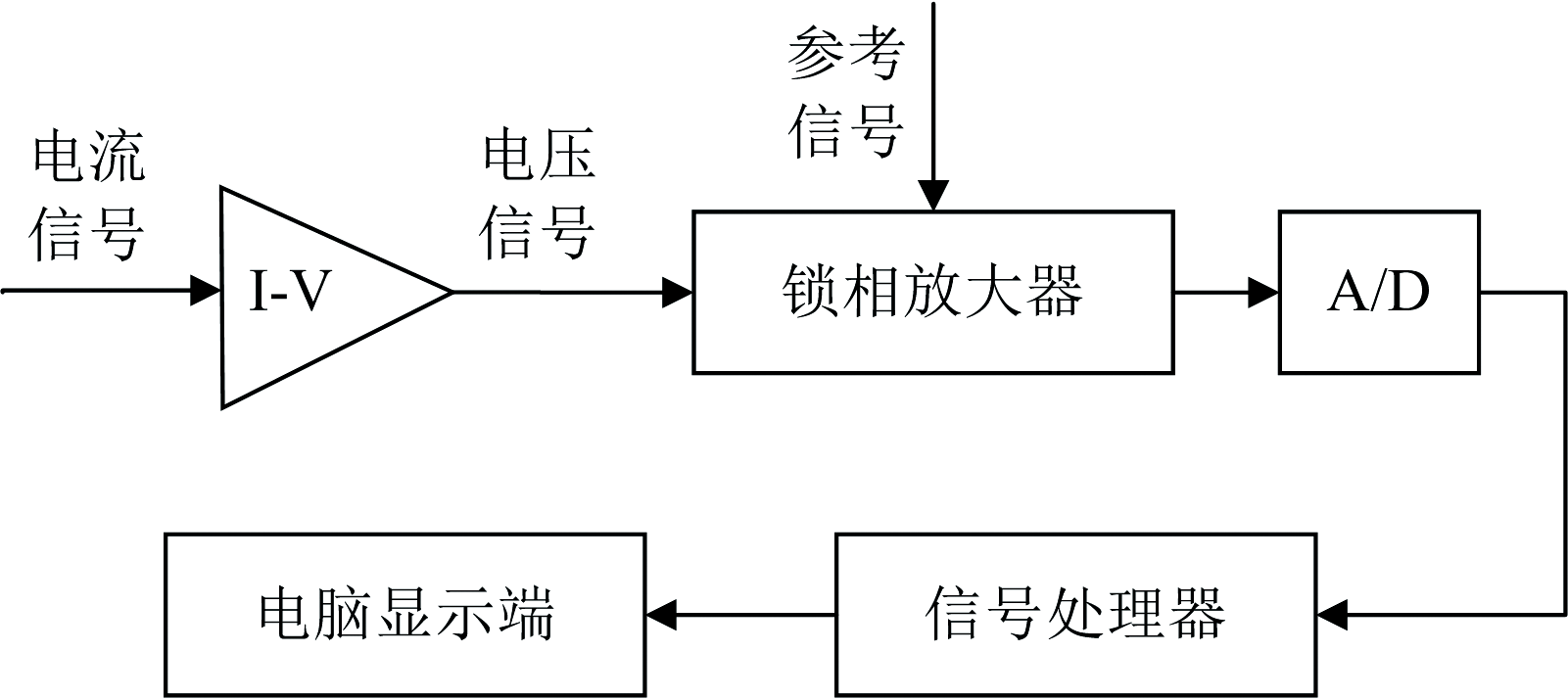 | 图6 信号收集与处理模块Fig.6 Signal collection and processing module |
A/D即模数转换器, 用于将锁相放大器输出的模拟量转换为输入至信号处理器的数字量, A/D芯片性能的衡量参数是采样率、 分辨率和功耗[50, 51]。 A/D芯片根据不同原理和设计电路分为多种类型。 积分型以积分器为核心, 利用定时、 积分、 比较将输入电压以数字形式表示出来[52], 具有较高的分辨率(22位), 但往往以牺牲速度为代价, 如TLC7135; 逐次逼近型使用二进制搜索算法使输出电压逼近输入模拟电压[53], 精度较高但速度适中, 如MAX115、 AD7641; 并行比较型又称闪烁型, 其成本较高, 转换速率最高, 但分辨率较低, 如AD9002、 AD9012; 流水线型便于集成, 由若干电路级联而成, 各级都具备一定的独立转换能力, 整体具有中等分辨率和较快的转换速率, 且功耗低、 尺寸小, 如MAX1205; Σ -Δ 型转换器对传入信号进行超采样, 并对所需的信号带进行过滤, 同时利用噪声整形技术实现高分辨率[54, 55], 但价格较高, 如AD7723、 AD9260。 由于残磁测量系统对测量精度的要求较高, 通常采用高分辨率的转换芯片, 如MS1242、 AD7723等。
信号处理器用于处理采集到的信号的设备, 目前应用较广的是FPGA、 ARM或DSP。 FPGA实际是一种集成化的电路, 包含一个可编程逻辑块, 质量高、 稳定性好[56], 但价格昂贵; ARM内核的微处理器一般规模较小、 功耗较低、 性能较高、 且价格相对较低[57], 运算速度根据不同型号有快有慢, 其质量和稳定度劣于前者; DSP指数字信号处理器, 其进行复杂数学运算(如矩阵运算)的能力最强, 常常与FPGA或ARM混合使用[58]。 在EPR测磁系统的信号采集部分不需要较高的运算速率, 具有简单数据处理能力和与PC端通信能力的处理器就可满足要求, 通常采用ARM内核的处理器, 如stm32等。
电脑显示端的上位机软件用于实现人机交互, 可通过Visual Basic、 Visual C、 LabVIEW等制作, 软件包括数据采集系统、 温度监控系统、 数据处理系统, 并用计算机对数据进行处理分析。
对基于EPR技术的残磁测量系统及其组成进行了调研分析, 可以看出EPR作为一种相对成熟的技术, 在残磁测量方面具有一定优势, 该传感系统利用光学检测, 灵敏度高, 能够实现小型化, 对近零磁环境的实现具有较大的应用前景。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
|
| [30] |
|
| [31] |
|
| [32] |
|
| [33] |
|
| [34] |
|
| [35] |
|
| [36] |
|
| [37] |
|
| [38] |
|
| [39] |
|
| [40] |
|
| [41] |
|
| [42] |
|
| [43] |
|
| [44] |
|
| [45] |
|
| [46] |
|
| [47] |
|
| [48] |
|
| [49] |
|
| [50] |
|
| [51] |
|
| [52] |
|
| [53] |
|
| [54] |
|
| [55] |
|
| [56] |
|
| [57] |
|
| [58] |
|