



{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于无人机成像高光谱估算马铃薯植株氮含量
[樊意广1, 3, 5  , 冯海宽
, 冯海宽1, 2, 3, * , 刘杨1, 3, 4 , 龙慧灵1, 3 , 杨贵军1, 3 , 钱建国5 ]
, 冯海宽, 刘杨|
|


作者简介: 樊意广, 1993年生, 农业农村部农业遥感机理与定量遥感重点实验室实习研究员 e-mail: fyglngd@163.com
植株氮含量(PNC)是评价作物长势和氮营养状况的重要指标, 因此, 准确高效地获取PNC信息, 对动态监测马铃薯长势及精准施控氮肥具有重要意义。 首先于马铃薯现蕾期、 块茎形成期、 块茎增长期、 淀粉积累期和成熟期获取无人机高光谱影像, 并基于预处理的影像提取5个生育期冠层的原始光谱和一阶微分光谱; 其次将提取的冠层光谱与马铃薯PNC进行相关性分析, 筛选出PNC的敏感波长; 然后分别利用灰度共生矩阵和1~3阶颜色矩, 提取冠层原始光谱特征波长处高光谱图像的纹理和颜色2种图像特征, 并将提取的特征与马铃薯PNC进行相关性分析, 筛选出相关性较高的前5个图像特征; 最后分别基于光谱特征、 图像特征和图谱融合特征利用弹性网络回归(ENR)、 贝叶斯线性回归(BLR)和极限学习机(ELM) 3种方法建立马铃薯PNC估算模型。 结果表明: (1)马铃薯5个生育期的冠层光谱特征波长存在差异, 但多数位于可见光区域。 (2)冠层原始光谱特征波长图像的纹理和颜色特征与PNC的相关性较高, 且现蕾期到淀粉积累期的相关性明显高于成熟期。 (3)基于单一光谱特征和单一图像特征构建的马铃薯PNC估算模型在现蕾期到淀粉积累期效果较好, 成熟期效果较差。 (4)现蕾期到淀粉积累期, 基于图谱融合特征的马铃薯PNC估算效果明显优于单一光谱特征和单一图像特征。 (5)马铃薯各生育期, 基于同种变量利用ENR构建的PNC估算模型效果较好, BLR次之, ELM较差。 其中, 以图谱融合特征为模型变量, 利用ENR构建的PNC估算模型精度和稳定性最好, 5个生育期的建模 R2分别为0.91、 0.75、 0.82、 0.77和0.69, RMSE分别为0.24%、 0.31%、 0.26%、 0.22%和0.29%, NRMSE分别为6.59%、 9.79%、 9.58%、 7.87%和11.03%。 该研究可为马铃薯的氮营养监测提供一种快捷高效的技术手段。
, FENG Hai-kuan, LIU YangPlant nitrogen content (PNC) is an essential indicator of crop growth and nitrogen nutrition status. Therefore, accurate and efficient access to PNC information is vital for dynamically monitoring potato growth and proper N fertilizer application. In this study, the UAV hyperspectral images were obtained at the budding stage, tuber formation stage, tuber growth stage, starch accumulation stage, and maturity stage of the potato. After preprocessing, the original canopy spectrum and first-order differential spectrum of five growth stages were extracted; Secondly, the correlation analysis was carried out between the extracted canopy spectrum and potato PNC, and the sensitive wavelength of PNC was screened out; Then, the texture and color of two image features of the hyperspectral image at the wavelength of the original spectral features of the canopy were extracted using the gray co-generation matrix and the 1st to 3rd-order color moments, respectively, and the extracted features were correlated with the potato PNC to filter out the top five image features with higher correlation; Finally, based on spectral features, image features, and map fusion features, potato PNC estimation models were established by using elastic network regression (ENR), Bayesian linear regression (BLR), and limit learning machine (ELM). The results showed that: (1) there are differences in the characteristic wavelengths of canopy spectra in the five growth stages of potatoes. Still, most of them were located in the visible region. (2) The correlation between the texture and color characteristics of the original spectral characteristic wavelength image of the canopy and PNC was high. The correlation from the budding stage to the starch store stage was significantly higher than that in the mature stage. (3) The estimation models of potato PNC based on a single spectral feature and a single image feature have a good effect from the budding stage to the starch accumulation stage but a poor effect at the maturity stage. (4) From the budding stage to the starch accumulation stage, the estimation effect of potato PNC based on the map fusion feature was significantly better than the single spectral feature and the single image feature. (5) In each growth period of potato, the PNC estimation models constructed by ENR based on the same variable were better, BLR was the second, and ELM was poor. Among them, the accuracy and stability of the PNC estimation models constructed by ENR with fusion characteristics as model variables were the best. The modeling R2 of five growth periods were 0.91, 0.75, 0.82, 0.77 and 0.69 respectively; RMSE were 0.24%, 0.31%, 0.26%, 0.22% and 0.29% respectively, and NRMSE were 6.59%, 9.79%, 9.58%, 7.87% and 11.03% respectively. This study can provide a fast and efficient technical tool for monitoring the nitrogen nutrition of potatoes.
氮素是作物合成叶绿素和蛋白质的物质基础, 对作物的生长发育和呼吸代谢具有重要作用[1]。 植株氮含量(plant nitrogen content, PNC)是评价作物氮营养状况的重要指标, 快速准确地获取PNC信息有利于氮肥的精准施控和作物长势的动态监测, 对提高作物产量和品质具有重要的意义。 传统的PNC测定方法是人工取样结合实验室测试, 该方法耗时费力, 且测定结果滞后, 不利于高效、 无损及大范围监测作物的氮营养状况。
近年来, 遥感技术凭借其高通量、 大尺度和实时动态等特点在作物理化参数监测中得到广泛关注。 与卫星和地面遥感技术相比, 无人机遥感技术操作简单, 机动性强, 在农田精细尺度和连续动态监测方面具有更大的优势[2]。 目前, 无人机平台搭载的传感器主要有数码、 多光谱和高光谱3种。 数码和多光谱传感器虽价格低廉, 但含有的波段数目少, 无法提供作物冠层精细的光谱信息。 而高光谱传感器具有光谱分辨率高和图谱合一等优点, 已成为有效监测作物理化参数的可靠技术手段[3]。
目前, 国内外学者利用无人机高光谱成像技术在监测作物的氮素营养状况方面取得了一定的研究进展。 如秦占飞等[4]基于引黄灌区水稻的无人机高光谱影像, 利用偏最小二乘方法估算水稻叶片尺度的全氮含量, 结果显示, 基于一阶微分光谱构建的比值光谱指数能较好估算水稻叶片的全氮含量。 Fan等[5]利用连续投影算法筛选敏感波段、 敏感波段位置及典型植被指数3种光谱变量, 结合不同的回归方法估算玉米叶片氮含量, 结果表明, 多类型光谱变量能有效提高估算模型精度。 王玉娜等[6]研究发现, 任意两波长组合构建的光谱指数与冬小麦氮营养指数的相关性显著高于典型植被指数和“ 三边参数” , 为冬小麦氮营养指数的动态监测提供了技术参考。 随着计算机与光谱分析技术的发展, 一些学者利用分数阶微分、 小波分析及波段深度分析等光谱变换技术对高光谱数据进行处理, 以深度挖掘有效的光谱信息, 进一步提高了作物理化参数的估算精度[7, 8, 9]。
以上研究表明, 不同波长组合方式及光谱变换技术可以充分挖掘高光谱影像丰富的光谱信息, 有利于提高监测作物氮营养状况的精度, 但也存在一定不足。 作物冠层在不同氮营养状况下的差异不仅体现在光谱反射率方面, 在图像特征如纹理和颜色上也有明显体现, 仅挖掘影像的光谱特征忽略了高光谱图谱合一的优势, 容易造成影像信息的丢失和浪费, 且无法避免单一光谱特征估算作物理化参数时存在的饱和现象[10, 11]。 然而, 结合无人机成像高光谱的图像和光谱特征监测作物氮营养状况的研究还鲜有报道。
综上所述, 本研究以无人机为遥感平台, 获取了马铃薯5个生育期的高光谱影像, 并提取各生育期的冠层光谱特征和冠层原始光谱特征波长图像的纹理和颜色2种图像特征, 分别基于光谱特征、 图像特征和图谱融合特征利用3种方法构建各生育期的PNC估算模型, 探究图像特征对估算马铃薯PNC的影响, 以期为马铃薯氮肥的精准管理提供技术支撑。
于2019年4月— 7月在北京市昌平区小汤山镇国家精准农业研究示范基地(40° 10'34″N, 116° 26'39″E)开展马铃薯试验, 该地平均海拔36 m。 选择2个早熟品种中薯5(Z1)和中薯3(Z2)作为试验品种。 设置密度试验(N区)、 氮肥试验(S区)和钾肥试验(K区) 3个试验区, 每个试验区设置3次重复, 共48个小区, 每个小区面积为6.5 m× 5 m。 方案实施详情见文献[12], 试验田位置与各试验小区处理详情如图1所示。
 | 图1 马铃薯试验田位置及试验设计Fig.1 Potato experimental field location and design |
分别于马铃薯现蕾期(2019年5月13日)、 块茎形成期(2019年5月28日)、 块茎增长期(2019年6月10日)、 淀粉积累期(2019年6月20日)和成熟期(2019年7月3日)利用无人机搭载Cubert公司生产的UHD 185成像光谱仪获取高光谱影像, 该传感器的波谱范围为450~950 nm, 采样间隔为4 nm, 光谱分辨率为8 nm。 选择晴朗、 无风无云的天气开展飞行作业, 飞行时间为12:00— 14:00, 飞行高度设置为20 m, 旁向重叠率为93%。 无人机高光谱影像的预处理在Agisoft Photo Scan Professional和Cubert-Pilot软件中进行, 主要包括影像的几何校正、 拼接和融合, 最后生成试验区域的数字正射影像(digital orthophoto map DOM)。
马铃薯PNC的测定方法如下: 无人机飞行作业结束后, 在每个试验小区选取3 株能代表整体长势的马铃薯植株, 将其茎叶分离, 用清水洗净, 105 ℃杀青0.5 h后置于80 ℃环境下, 烘干至质量恒重, 然后利用高精度的天平和凯氏定氮仪分别测量茎和叶部分的样本干质量和全氮含量, 最后根据所测数据计算茎和叶的氮含量, 进而得到马铃薯植株氮含量[13]。
1.4.1 光谱特征提取
不同氮素营养状态会引起马铃薯冠层光谱反射率的差异, 因此可以通过特征波长的反射率特征监测马铃薯植株氮含量。 马铃薯5个生育期冠层光谱特征波长的提取方法如下: 首先基于5个生育期的DOM, 利用Arcmap10.2 软件生成马铃薯48个试验小区的矢量数据, 其次利用IDL语言提取各小区的平均光谱, 并将提取的平均光谱作为马铃薯的冠层原始光谱, 然后在Matlab 2016b软件中计算5个生育期的一阶微分光谱, 最后基于Excel 2012软件, 利用相关性分析法筛选马铃薯5个生育期冠层原始光谱和一阶微分光谱的特征波长。
1.4.2 图像特征提取
基于冠层原始光谱特征波长对应的高光谱图像, 提取纹理和颜色2种图像特征。 其中, 图像的纹理特征用灰度共生矩阵(gray level co-occurrence matrix, GLCM)表示。 已有的研究表明, 窗口的大小和方向对提取的灰度矩阵纹理影响不大[13, 14], 因此, 选取窗口大小为3× 3、 45° 方向上的对比度(contrast, Con)、 能量(second moment, Sec)、 熵(entropy, Ent)、 同质性(homogeneity, Hom)和相关性(correlation, Cor) 5种纹理特征作为模型因子估算马铃薯植株氮含量; 图像的颜色特征用1~3阶颜色矩表示, 即均值(mean, Mea)、 方差(variance, Var)和斜度(skewness, Ske)。 图像特征的提取在Matlab 2016b软件中进行。
采用弹性网络回归(elastic network regression, ENR)、 贝叶斯线性回归(Bayesian linear regression, BLR)和极限学习机(extreme learning machine, ELM) 3种方法构建马铃薯5个生育期的植株氮含量估算模型。 ENR是一种改进的线性回归模型, 它通过引入L1和L2惩罚项对目标函数进行约束, 对具有相关性的变量同时进行筛选或缩减, 以达到提高模型精度和稳定性的目的。 BLR能够根据输入参数的先验信息形成先验分布, 进而提高对数据的适应能力, 防止出现过拟合现象。 ELM是一种简单高效的单隐层前馈神经网络算法, 该算法能避免常规神经网络算法中存在的收敛速度慢, 易陷入局部极小值等问题。
利用重复1和重复3的数据(32个)训练模型, 重复2的数据(16个)验证模型, 并采用决定系数(coefficient of determination, R2)、 均方根误差(root mean square error, RMSE)和标准均方根误差(normalized root mean square error, NRMSE)评价模型性能。
将马铃薯5个生育期的冠层原始光谱和一阶微分光谱分别与对应的PNC进行相关性分析, 结果如图2所示。 其中, 自由度为48时, 0.01相关水平阈值是0.36, 黑色和红色纵向虚线分别表示冠层原始光谱和一阶微分光谱特征波长。
 | 图2 冠层光谱与PNC相关性 OR表示冠层原始光谱与PNC相关性曲线, FD表示一阶微分光谱与PNC相关性曲线Fig.2 Correlation between canopy spectra and PNC OR represents the correlation curve between the original canopy spectrum and PNC, FD represents the correlation curve between the first-order differential spectrum and PNC |
由图2可知, 现蕾期, 冠层原始光谱在波段454~730 nm范围内与PNC呈0.01相关水平, 一阶微分光谱主要在波段492~550、 630~666、 674~694和710~766 nm范围内与PNC呈0.01相关水平, 因此, 选取相关性较高的波长554和710 nm为冠层原始光谱特征波长, 波长542、 662、 678和766 nm为一阶微分光谱特征波长; 块茎形成期, 冠层原始光谱主要在波段550~618、 694~706和734~922 nm范围内与PNC呈0.01相关水平, 一阶微分光谱主要在波段486~550、 626~662、 670~682、 698~762和774~798 nm范围内与PNC呈0.01相关水平, 因此选取相关性较高的波长566、 698和778 nm为冠层原始光谱特征波长, 波长502、 658、 678、 730和782 nm为一阶微分光谱特征波长; 块茎增长期, 冠层原始光谱主要在波段454~698和714~950 nm范围内与PNC呈0.01相关水平, 一阶微分光谱主要在波段546~582、 650~778和846~946 nm范围内与PNC呈0.01相关水平, 因此, 选取相关性较高的波长518、 574和854 nm为冠层原始光谱的特征波长, 波长554、 722和862 nm为一阶微分光谱的特征波长; 淀粉积累期, 冠层原始光谱主要在波段454~706和722~950 nm范围内与PNC呈0.01水平相关, 一阶微分光谱主要在波长470 nm、 波段694~778和866~946 nm范围内与PNC呈0.01相关水平, 因此, 选取相关性较高的波长542、 694和830 nm为冠层原始光谱的特征波长, 波长470、 738和906 nm为一阶微分光谱的特征波长; 成熟期, 冠层原始光谱主要在波段518~582和714~722 nm范围内与PNC呈0.01相关水平, 一阶微分光谱主要在波段502~542、 650~674和770~778 nm范围内与PNC呈0.01相关水平, 因此, 选取相关性较高的波长546和718 nm为冠层原始光谱的特征波长, 波长510、 662和774 nm为一阶微分光谱的特征波长。
为探究高光谱图像特征对估算马铃薯PNC的影响, 利用GLCM和颜色矩分别提取了冠层原始光谱特征波长对应的图像的纹理和颜色特征, 并分析与PNC的相关性, 结果如图3所示。 由图3可知, 马铃薯现蕾期, 与PNC相关性较高的前5个图像特征分别是710Var(波长701 nm对应的Var纹理)、 554Var、 554Mea、 710Cor和554Ent, 相关系数绝对值位于0.78~0.86之间; 块茎形成期, 相关性较高的前5个图像特征分别是698Hom、 698Sec、 698Ent、 698Cor和566Mea, 相关系数绝对值位于0.79~0.85之间; 块茎增长期, 相关性较高的前5个图像特征分别是518Ske、 518Var、 854Ent、 854Sec和574Con, 相关系数绝对值位于0.65~0.75之间; 淀粉积累期, 相关性较高的前5个图像特征分别是542Mea、 542Ske、 542Ent、 542Sec和542Cor, 相关系数绝对值位于0.60~0.69之间; 成熟期, 相关性较高的前5个图像特征分别是546Mea、 546Ent、 546Sec、 546Cor和546Con, 相关系数绝对值位于0.53~0.63之间。 5个生育期筛选的相关性较高的前5个图像特征均与PNC达到0.01相关水平, 且都含有纹理和颜色2种特征, 这说明纹理和颜色特征与马铃薯PNC的联系较为密切。
 | 图3 图像特征与PNC相关性Fig.3 Correlation between image features and PNC |
2.3.1 单一模型变量估算马铃薯PNC
分别基于马铃薯5个生育期冠层光谱特征波长和相关性较高的前5个图像特征, 利用ENR、 BLR和ELM 3种方法构建PNC估算模型并验证, 建模和验证结果如表1和表2所示。 由表1和表2可知, 基于光谱特征(x1)和图像特征(x2)利用3种方法构建的马铃薯各生育期PNC估算模型均表现为现蕾期到淀粉积累期估算效果较好, 成熟期估算效果较差。 其中, 现蕾期到块茎增长期, 利用3种方法基于光谱特征构建的模型效果略优于图像特征, 但相差不大; 淀粉积累期, 基于图像特征的估算效果开始变差, 这一时期, 光谱特征构建的模型效果明显优于图像特征; 成熟期, 基于2种模型变量的估算效果均明显变差, 基于光谱特征的建模效果优于图像特征, 验证效果二者相差不大。 综合5个生育期的建模和验证结果可知, 基于同种模型变量, 利用ENR构建的PNC估算模型效果较优, BLR方法次之, ELM方法较差。
| 表1 各生育期基于单一模型变量估算马铃薯PNC的建模结果 Table 1 Modeling results of potato PNC estimation based on a single model variable at each growth stage |
| 表2 各生育期基于单一模型变量估算马铃薯PNC的验证结果 Table 2 Validation results of potato PNC estimation based on a single model variable at each growth stage |
2.3.2 结合光谱和图像特征估算马铃薯PNC
为探究结合高光谱图像和光谱特征估算马铃薯PNC的效果, 基于冠层光谱特征波长及筛选的与PNC相关性较高的纹理和颜色特征, 分别利用3种方法构建马铃薯5个生育期的PNC估算模型并验证, 结果如表3和图4所示。 由表3和图4可知, 与单一模型变量相似, 基于图谱融合特征(x3)构建的马铃薯PNC估算模型在现蕾期到淀粉积累期效果较好, 成熟期效果较差。 综合表1、 表2、 表3和图4的结果可知, 现蕾期到淀粉积累期, 以图谱融合特征为模型变量的PNC估算模型的精度和稳定性均明显高于单一光谱特征和图像特征, 而成熟期, 图谱融合特征的估算效果与单一光谱特征相差不大。 基于图谱融合特征利用3种方法估算马铃薯PNC的效果为ENR较优, BLR次之, ELM较差。
| 表3 各生育期基于融合特征估算马铃薯PNC的建模结果 Table 3 Modeling results of potato PNC estimation based on fusion characteristics at each growth stage |
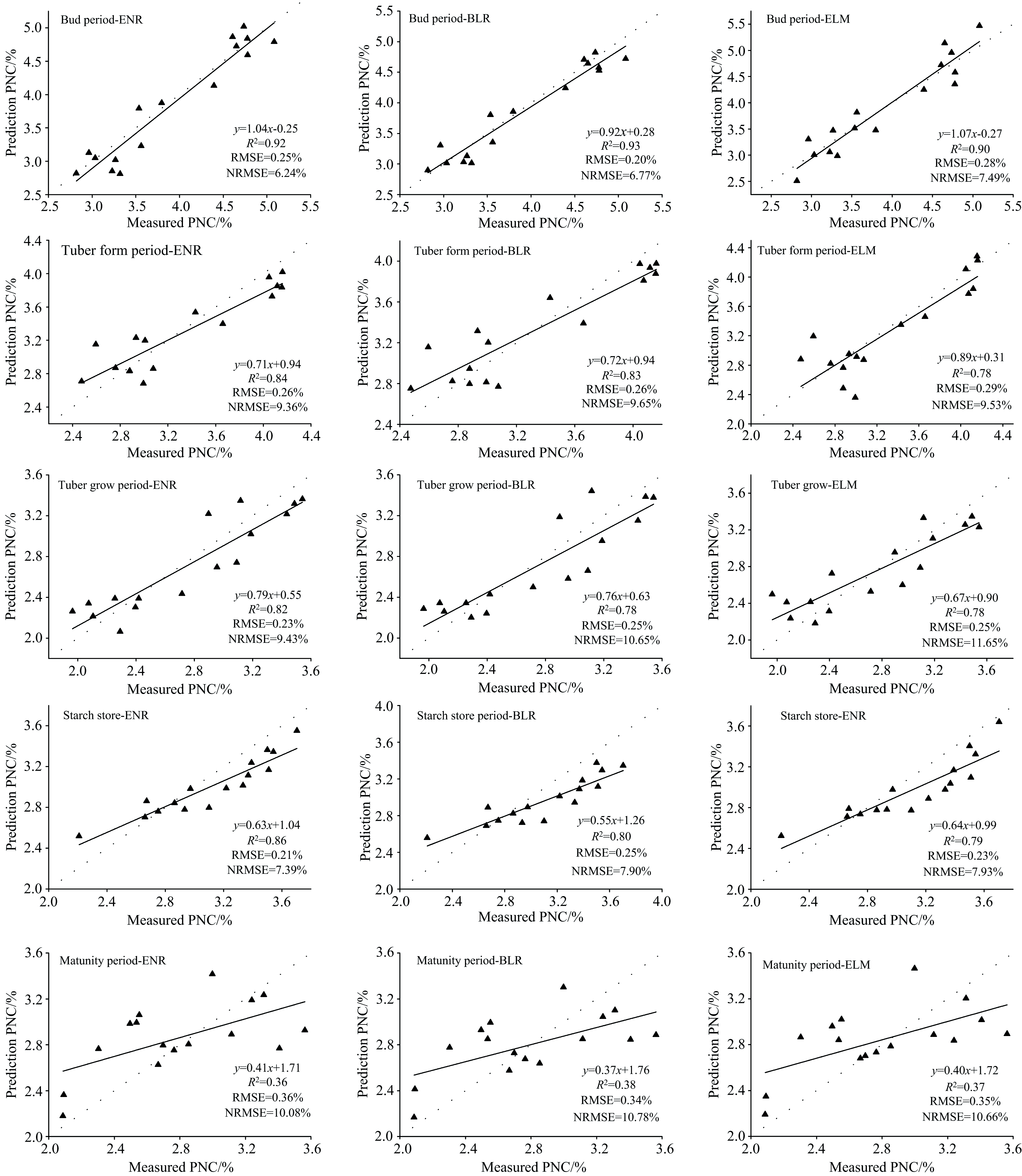 | 图4 各生育期基于融合特征估算马铃薯PNC的验证效果Fig.4 Validation effect of estimation of potato PNC based on fusion characteristics at each growth stage |
为探究高光谱图像特征估算马铃薯PNC的效果, 分别基于光谱特征和图像特征利用3种方法构建马铃薯5个生育期的PNC估算模型。 由结果可知, 现蕾期到块茎增长期, 以图像特征为模型变量构建的PNC估算模型的估算效果与光谱特征相差不大, 这表明图像特征能较好地反映马铃薯的PNC状况, 其原因是, 作物植株氮含量的变化不仅会引起冠层光谱特性发生改变, 也会导致冠层凸凹部分的灰度值及亮度值出现差异, 即图像的纹理和颜色差异, 因此, 图像特征也能较好地估算PNC; 淀粉积累期, 光谱特征估算PNC的效果明显优于图像特征, 其原因是, 淀粉积累期, 部分马铃薯植株开始衰老, 叶片逐渐枯黄, 纹理减少, 颜色特征减弱, 导致图像特征与PNC的相关性降低。 成熟期, 2种模型变量构建的PNC估算模型均未取得较好的效果, 其原因是, 马铃薯生长后期, 受降雨较多影响, 部分马铃薯植株枯死凋零, 叶片迅速脱落, 这一时期提取的光谱和图像特征均不能反映马铃薯真实的生长状态, 故模型估算效果较差。
为探究图谱融合特征估算马铃薯PNC的效果, 以光谱特征结合图像特征为模型变量, 利用3种方法构建马铃薯5个生育期的PNC估算模型。 由结果可知, 现蕾期到淀粉积累期, 相较于单一光谱特征和图像特征, 图谱融合特征构建的模型R2均有所提高, RMSE和NRMSE均有所下降, 其原因是, 图谱融合特征包含不同氮营养状况的作物冠层光谱和图像两方面的信息, 为估算PNC提供了更多的有效信息, 能更准确地反映PNC的变化情况。 成熟期, 图谱融合特征估算PNC的效果明显变差, 其原因是, 受降雨等因素的影响, 这一时期提取的光谱和图像特征不能反映马铃薯真实的生长状态, 二者结合也未能提高模型的精度。
利用ENR、 BLR和ELM 3种方法构建马铃薯PNC估算模型, 综合各生育期的建模和验证结果可知, 基于同种模型变量, 利用ENR方法估算马铃薯PNC效果最优, BLR次之, ELM最差。 其原因是, ENR在损失函数中同时引入L1和L2惩罚项, 提高了对自变量的筛选和缩减能力, 能更有效地利用多个光谱和图像特征对PNC进行估算; BLR虽能充分利用样本数据, 但效果不如ENR, 可能原因是BLR过于依赖先验信息[15], 导致模型的精度有所降低; ELM虽具有良好的泛化性能, 但对较小的数据集优势不明显, 导致模型精度不高。 此外, 本研究仅采用了1年的马铃薯数据, 后续将采用不同地点及年限的马铃薯数据验证所得结论, 以期得到普适的马铃薯PNC估算模型。
(1)利用相关系数法筛选的马铃薯5个生育期的冠层光谱特征波长存在差异, 但多数集中于可见光区域。
(2)基于冠层原始光谱特征波长图像筛选的5个图像特征与马铃薯PNC均达到0.01相关水平, 且都包含纹理和颜色2种特征。
(3)基于光谱特征、 图像特征和图谱融合特征构建的马铃薯PNC估算模型均表现为现蕾期到淀粉积累期估算效果较好, 成熟期效果较差, 且现蕾期到淀粉积累期图谱融合特征的估算效果明显优于单一光谱特征和单一图像特征。
(4)马铃薯各生育期基于同种模型变量利用ENR方法构建的PNC估算模型效果较优, BLR方法次之, ELM方法较差。 其中, 以图谱融合特征为模型变量, 利用ENR构建的PNC估算模型效果最好。 该研究可为马铃薯氮肥的精准管理提供一种新的技术参考。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|