

{kind=link}
{kind=link}
{kind=link}
{kind=link}
光纤水听器解调技术研究进展
[郭银景1, 3  , 王蕾
, 王蕾1 , 苏铭玥1 , 宋亚琦1 , 吕文红2, 3, * ]
, 王蕾]
|
|


作者简介: 郭银景, 1966年生, 山东科技大学电子信息工程学院博士生导师 e-mail: 17806283605@163.com
光纤水听器是水声研究领域的关键技术, 在实际应用中具有显著优势, 广泛应用于AUV导航定位、 资源勘探、 海水警戒等场景。 光纤水听器将声信号转化为光信号传播, 在接收信号时就需要对光信号进行解调提取出声压信号。 总结了几种常用的信号解调算法及关键技术, 包括PGC解调法、 3×3耦合器解调法和外差解调法; 介绍了各种解调算法的基本原理和改进技术; 总结对比了各种算法的优缺点; 最后给出了光纤水听器解调技术面临的挑战。
Fiber-optic hydrophone is a key technology in underwater acoustic research and has significant advantages in practical application. It is widely used in AUV navigation and positioning, resource exploration, seawater warning and other scenarios. The optical fiber hydrophone transmits the sound signal into the light signal. The optical signal needs to be demodulated to extract the sound pressure signal when receiving the signal. Several common signal demodulation algorithms are summarized in this paper, including the PGC demodulation algorithm, 3×3 coupler demodulation algorithm and heterodyne demodulation algorithm. Then, the basic principles and improved technology of various demodulation algorithms are described with a summary and comparison of their advantages and disadvantages. Finally, the challenges that the demodulation technology of fiber optic hydrophone faces have been put forward.
近年来, 随着科学技术的进步, 世界各国都加大了对海洋领域的研究, 光纤水听器是目前水声研究领域的一种关键技术, 是当下研究的热点。 光纤水听器是一种建立在光纤、 光电子技术基础上的水下声信号传感器, 它可以通过高灵敏度的光学相干检测将水声震动转换成光信号, 通过光纤传到信号处理系统提取声信号的信息。 与其他类型水听器相比, 光纤水听器具有如下优点[1, 2, 3, 4, 5]: (1) 灵敏度高, 频响特性好; (2) 动态范围大; (3) 抗电磁干扰和信号串扰能力强; (4) 适于远距离传输与组阵; (5) 信号传感与传输一体化, 系统可靠性高; (6) 耐高温高压、 耐腐蚀等。
自20世纪70年代提出以来, 光纤水听器就得到了迅速的发展, 并广泛应用于水下潜航器的导航定位[6]、 海洋地震勘探[7]、 石油资源勘探、 水声警戒、 海洋物理研究、 海水养殖等[8, 9]场景。 光纤水听器的信号解调问题是光纤水听器研究的重点, 而解调算法是信号解调的重中之重。 常用的解调算法有: 相位生成载波(phase generated carrier, PGC)法、 3× 3耦合器法、 外差法等。 近些年, 研究者们提出了各种改进算法用于提高解调系统的性能。
光纤水听器将声信号转化为光信号传播, 将光相移与声压信号之间的线性关系转化为光强与声压信号的非线性关系, 因此在接收信号时就必须对光信号进行解调提取出声压信号[10]。 外差检测法是一种基本的信号检测方法, 广泛应用于光学检测和电子检测, 是英国QinetiQ公司、 Stingray公司和美国海军实验室等使用的主要信号检测方案。 2011年, 张楠等[11]研究了外差检测方法的动态范围上限, 系统分析了外差检测法解调及其性能。 外差解调法可以分为: 外差-微分交叉相乘(differential cross-multiplication, DCM)算法、 外差-反正切(Atan)算法。 干涉信号在去除直流后得到信号
式(1)中, Δ f为外差频率, φ (t)为待测信号、初始相位和环境噪声之和, ys分别与参考信号
之后利用DCM方法或Atan方法可以恢复被测信号[12, 13]。
这种外差解调法可以把待测信号调制在外差频率的边带上, 能够很好地抑制低频噪声。 2012年, 蒋鹏等[14]在瑞利散射光的相干检测基础上, 将双脉冲外差解调技术与光时域反射仪(optical time-domain reflectometer, OTDR)结合, 提出的基于双脉冲外差解调算法的分布式光纤传感系统, 很大程度上抑制了低频噪声, 提高了检测灵敏度。 2016年, Hu等[15]论证了PGC算法与外差解调算法, 并比较了它们的性能, 仿真结果显示, 外差法和PGC法均能实现无失真解调, 但当待测信号幅度过大时, PGC算法存在混频现象, 而外差解调法信号频谱集中在一定范围内, 解调范围较大。 Chen等[16]将使用外差检测的接收机用于通信系统中, 提高了信号接收的灵敏度; He等[17]提出一种利用双外差脉冲与外差解调相结合的相位敏感光时域反射仪(phase-sensitive optical time-domain reflectometry, Φ -OTDR)系统, Cusato等[18]介绍了一种用于相干层析成像的外差检测系统, 都具有较大的检测范围。 此外, 2017年, Zhang等[19]提出基于外差解调算法的偏振分集接收信道(ASTPDR)可以消除干涉型光纤水听器中的偏振诱导衰落(polarization induced fading, PIF)问题, 实验结果表明, 该方法不仅可以消除PIF, 还在一定程度上抑制了背景噪声。 外差法是一种经典的信号检测方法, 使用其解调能够检测大范围信号, 且算法复杂度较低, 但是存在稳定性差的问题, 限制了其在实际中的应用。
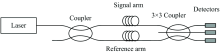
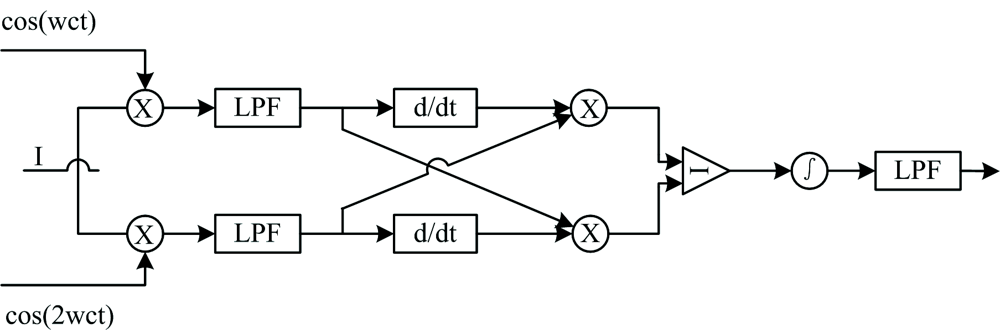
1982年, Sheem等[20]最先提出了基于3× 3耦合器的解调方法, 用于解决信号的衰落问题(图1, 图2)。 这种解调方法需要耦合器的三路输出信号保持120° 的相位差[21, 22], 三路信号可记为
式(3)中,
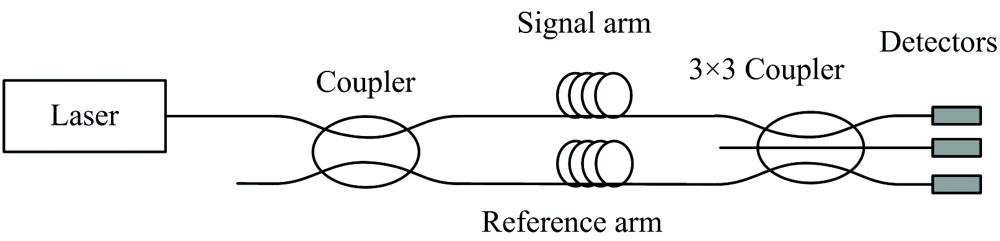 | 图1 3× 3耦合器检测原理Fig.1 The principle of 3× 3 coupler demodulation |
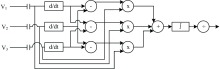
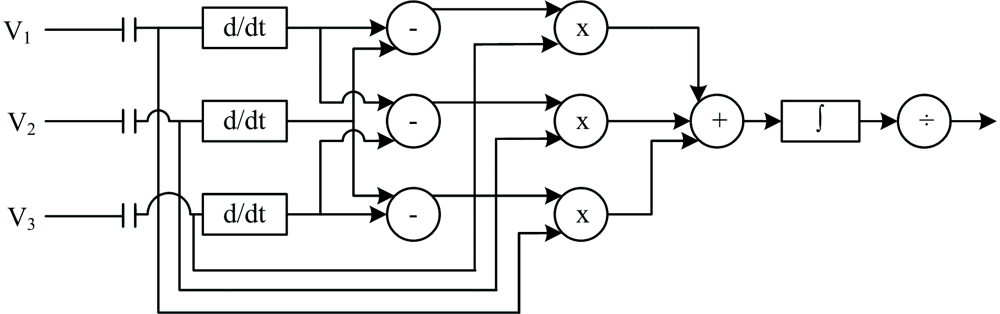 | 图2 3× 3耦合器解调算法原理Fig.2 The principle of 3× 3 coupler demodulation algorithm |
3× 3耦合器输出的三路信号滤除直流后微分得到
式(4)中, 三式两两交叉相乘再相加得到
经过积分与带通滤波器后可恢复待测信号
2011年, Rao等[25]用四元拖曳阵列进行了海底探测试验, 采用3× 3耦合器解调方法进行解调, 具有较大的动态范围, 试验成功得到了海底沉积物的粗略地形图, 但是试验过程中由于随机噪声的干扰, 反射波的振幅随机变化, 解调结果不稳定。 为降低噪声的影响, 2017年, Mao等[26]分析了强度噪声的传播过程, 并在此基础上提出了一种改进的3× 3耦合器解调算法, 在自动增益控制(automatic gain control, AGC)电路之后通过除法器去除强度噪声, 实验结果显示, 这种改进算法噪声降低了大约20 dB, 具有较好的解调效果。
3× 3耦合器解调算法要求3× 3耦合器在解调过程中严格对称, 但是在实际中, 不能保证120° 的相位差。 为消除相位差限制, 2017年, Liao等[27]基于3× 3耦合器端口的相位差提出了椭圆拟合微分交叉相乘(EF-DCM)算法; 2019年, 宋美杰等[28]针对3× 3耦合器算法的不足, 借鉴PGC算法, 提出一种新的解调算法; 2020年, 代欣学等[29]提出了一种基于3× 3耦合器的反正切解调算法, 消除了相位差对解调结果的影响。 3× 3耦合器解调算法原理简单, 信号检测范围大, 但是由于其电路体积较大, 不便于大规模阵列的应用[30]。 2020年, Qu等[31]采用Ellipse-DAT算法对3× 3耦合器的两路信号进行解调, 实验结果表明, 该方法能够实现相对准确、 无失真的解调, 同时也减少了1/3的硬件体积。
PGC算法是光纤水听器信号检测的一种重要解调方式[32], 目前主要的PGC算法有: PGC-微分交叉相乘(PGC-DCM)法、 PGC-反正切(PGC-Atan)法。
PGC-DCM算法是由DanDrige等提出的[33], 算法原理如图3所示, 假设干涉信号为
 | 图3 PGC-DCM算法原理Fig.3 The principle of PGC-DCM algorithm |
式(6)中, ω c为相位载波调制的角频率, φ 0(t)为外部环境引起的误差, φ s(t)为待测信号, A是干涉仪的输入光强, B是干涉信号的强度, C是调制深度; 利用载波的单倍频信号和二倍频信号对干扰信号混频得到一对相互正交的正弦、 余弦函数, 然后通过低通滤波器得到[34]
式(7)中, J1(C)和J2(C)分别为第一类一阶和二阶贝塞尔函数, 式(7)经过微分交叉相乘得到
式(8)再经过积分得到
最后通过一个带通滤波器滤除噪声, 从干涉信号中恢复被测信号。
PGC-DCM算法原理比较简单, 但是存在直流漂移和光强干扰(light intensity disturbance, LID)等问题[35]。 为了提高解调性能, 2011年, 施清平等[36]提出了一种基于3× 2耦合器的PGC-DCM算法, 只对双通道的一路信号进行微分, 实验表明, 该算法能够有效消除伴生调幅的影响, 与PGC-DCM相比, 信噪比(singal noise ratio, SNR)提高了20 dB, 幅度偏差也只有0.08 rad。 2012年, Wang等[37]提出一种PGC-Arccot-DSM算法, 将微分自乘算法与反余切算法结合, 提高了系统的稳定性和线性度, 通过实验得到此算法的总谐波失真(total harmonic distortion, THD)低于0.1%, 线性度高于0.999 9, 但是由于调节过程比较复杂, 系统的实时性较差。 与之相比, 2014年, Zhang等[38]介绍的PGC-DSMI算法, 通过消除PGC-DCM算法中的系数, 获得了较高的实时性, 仿真结果显示, PGC-DSMI算法的线性度高达0.999 9, 并一定程度上抑制了LID的影响。 2019年, Yu等[39]设计并分析了一种PGC-SDD算法, 通过单路差分, 两路分频, 解决了传统PGC-DCM算法的不足, 即在提高稳定性的同时又具有低谐波失真性, 经过实验验证, PGC-SDD算法的SNR达到了33.69 dB, 有效抑制了光强和调制深度对解调结果的影响, 同时还可以用于解调非周期信号。
传统的PGC-DCM算法具有较高的实时性, 但是存在直流漂移和LID等问题, 针对其缺点, 研究者们做出了许多改进措施, 但在此过程中, 对算法的复杂度及实时性造成了影响, 一定程度上影响了解调性能。
为了消除LID的影响, 1994年, Timothy R. Christian首先提出了PGC-Atan算法[40], 如图4所示, 干涉信号I经过倍频与低通滤波后得到
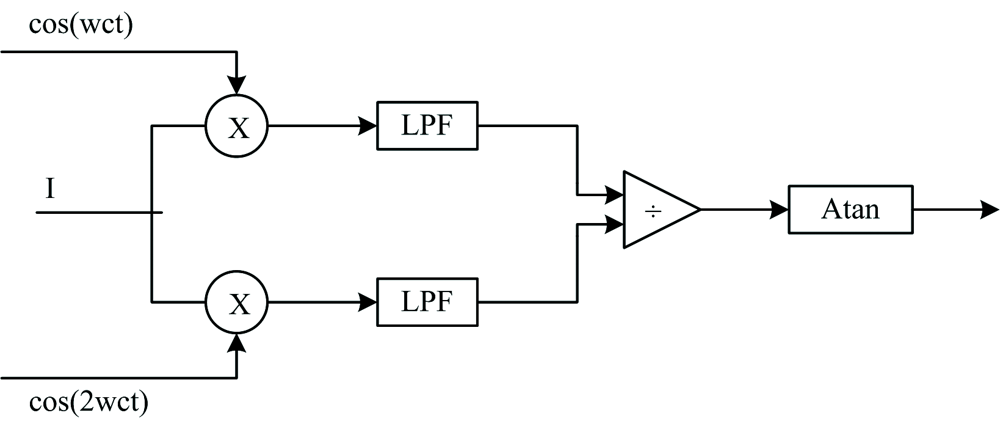 | 图4 PGC-Atan算法原理Fig.4 The principle of PGC-Atan algorithm |
将式(10)中的两式相除得到
当J1(C)/J2(C)=1时, 对式(11)进行反正切处理, 就可以得到含有噪声的信号φ s(t), 然后经过带通滤波器滤除噪声即可得到原始信号[41]。 PGC-Atan算法虽然解决了LID的影响, 但是会产生比较严重的谐波失真[42]。
针对PGC-Atan算法的不足, 研究者们提出了许多改进算法。 2008年, Liu等[43]分析了PGC-Atan算法, 认为其非线性问题是由强度调制引起的, 并提出一种改进方案, 使用公式:
信号解调算法是光纤水听器的研究重点, 常用的解调算法有: PGC法、 3× 3耦合器法、 外差法等, 本文介绍了光纤水听器常用解调算法的原理及优缺点, 对比如表1所示, 并对近些年的研究进行了总结。
| 表1 光纤水听器主要解调算法优缺点对比 Table 1 The comparison of advantages and disadvantages of main demodulation algorithms of fiber optic hydrophone |
随着科学技术的不断发展, 学者们提出了PGC-SDD, PGC-DSM和PGC-DSMI等算法解决传统解调算法的不足, 但是由于海洋环境的变化复杂多样, 光纤水听器的解调算法还有更大发展空间。
(1) 目前, 光纤水听器的信号解调算法已经取得了许多新的研究成果, 但是每一种算法都有其不足之处, 所以解调算法的改进依旧是研究光纤水听器的重点。 随着研究者的深入研究, 不断出现一些新的算法, 或者通过不同算法间的结合, 取长补短, 从而得到更为优秀的算法。 例如, PGC算法与3× 3耦合器解调结合, 消除了信号混叠和LID问题, 还在一定频率范围内提高了解调的稳定性。
(2) 3× 3耦合器解调技术信号的解调范围较大, 环境噪声对其影响相对较小, 但是其电路体积较大, 不适合大规模阵列的应用。 光纤水听器一般用于AUV的导航定位或海水警戒等场景, 制作体积小、 解调范围大、 实时性好的光纤水听器仍是一项亟待解决的重要任务。
(3) 文中介绍的几种解调算法基本都存在稳定性差的问题, 而光纤水听器的使用场景要求其稳定性能越高越好, 因此, 提高解调算法的稳定性是未来研究的主要方向。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
|
| [30] |
|
| [31] |
|
| [32] |
|
| [33] |
|
| [34] |
|
| [35] |
|
| [36] |
|
| [37] |
|
| [38] |
|
| [39] |
|
| [40] |
|
| [41] |
|
| [42] |
|
| [43] |
|
| [44] |
|
| [45] |
|
| [46] |
|
| [47] |
|