
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
内陆河道表层水体反射光谱的走航观测研究
[王春娟1, 2  , 周斌
, 周斌1, 2, * , 郑瑶瑶3 , 于之锋1, 2 ]
, 周斌, 郑瑶瑶|
|


作者简介: 王春娟, 1996年生, 杭州师范大学理学院硕士研究生 e-mail: 1323569045@qq.com
现场水体光谱观测是水体光学性质、 水色遥感反演建模等研究不可或缺的基础性工作之一。 常规的倾斜观测方法受其较为严格的观测几何条件限制, 需要依据船体位置、 太阳方位等不断调整观测角度, 特别是针对河道水体光谱观测时, 还须考虑河道走向、 岸线遮蔽物等情况, 因此, 只能设置若干站点进行离散样点的观测, 难以在岸线环境较为复杂的河道水体开展连续走航快速观测。 而现场水体光谱连续走航快速观测能够获取不同地方时的大样本水体反射光谱, 丰富对水体二向反射特征的认识, 并建立更精确的反演模型, 在水色遥感研究中具有极其重要的作用。 鉴于此, 设计了一种基于垂直观测几何方式的内陆河道表层水体反射光谱连续走航快速观测方法, 并通过时空匹配技术获取整个河道的全波长遥感反射率数据。 在杭州西小江部分河段的试验表明, 该方法获取的遥感反射率与同步实测的叶绿素浓度、 浊度等水色组分的相关性较强, 选取的特征波段获得的确定系数 R2均大于0.855。 Sentinel-2的观测天顶角接近于0, 近乎于垂直观测。 该研究使用Sentinel-2B的光谱响应函数对实测光谱进行等效光谱模拟, 转换为相应波段的等效遥感反射率, 反演结果与基于Sen2Cor的大气校正后的遥感反射率数据进行建模, 分析结果表明, 基于Sen2Cor的大气校正后的遥感反射率数据存在高估现象, 同时又用Sentinel-2B的大气表观反射率反推辐射亮度, 然后用FLAASH大气校正获取Sentinel-2B的遥感反射率数据, 经与实测等效遥感反射率建模分析发现, 基于FLAASH的大气校正后的遥感反射率数据在小于0.02 sr-1时也存在高估现象, 在大于0.02 sr-1时则存在明显低估现象。 研究表明, 用该方法所获取的大样本实测遥感反射率数据具有对卫星反射率产品进行真实性验证的应用潜力。
In situ measurement of water spectrum is one of the indispensable basic works in the research of water optical properties and watercolor remote sensing inversion modeling. The conventional oblique observation method is restricted by its strict observation geometric conditions, it is necessary to constantly adjust the observation angle according to the position of the ship and the azimuth of the sun, especially for the spectral observation of river water, need to consider the river direction, shoreline shelter and other conditions. Therefore, only a few stations can be set for observation of discrete sample points, it is not easy to carry out rapid observation for continuous navigation in the river water with complex environments around the shoreline. The rapid observation for continuous navigation of the field water spectrum can obtain the reflectance spectrum of large samples of water from different local times, enrich the understanding of the bidirectional reflection characteristics of water, and establish more accurate inversion models, which plays an extremely important role in the study of watercolor remote sensing. Because of this, a rapid observation method for continuous navigation of reflectance spectrum of inland river surface water based on vertical observation geometry is designed in this study, and then obtained the full-wavelength remote sensing reflectance data of the whole river through Spatio-temporal matching technology. The experiments in some sections of XiXiao River in Hangzhou show that the correlation coefficient between remote sensing reflectance obtained by this method and the watercolor components such as chlorophyll concentration and turbidity measured synchronically is strong, the determination coefficients R2 are all greater than 0.855 at the characteristic bands selected in this study. The observation zenith angle of Sentinel-2 is close to 0, close to vertical observation. In this study, use the spectral response function of Sentinel-2B to perform equivalent spectral simulation of the measured spectrum and converts it into the equivalent remote sensing reflectance of the corresponding bands. The inversion result is modeled with the sensing reflectance data after atmospheric correction based on Sen2Cor. The analysis results show that the remote sensing reflectance data after atmospheric correction based on Sen2Cor is obviously overestimated. At the same time, use of Sentinel-2B’s atmospheric apparent reflectance to deduce the radiance, then used FLAASH atmospheric correction to obtain the remote sensing reflectance of Sentinel-2B. By modeling and analyzing the equivalent remote sensing reflectance, the remote sensing reflectance data after atmospheric correction based on FLAASH is also overestimated when it is less than 0.02 sr-1, but obviously underestimated when it is greater than 0.02 sr-1. Research shows that the large sample measured remote sensing reflectance data obtained by this method has the application potential to verify the authenticity of satellite reflectance products.
水体光谱观测是水体光学性质、 水色遥感反演建模等研究不可或缺的基础性工作之一。 常规的水体光谱测量多以倾斜观测为主, 即以Mobley等[1, 2, 3]的研究推荐采用(40° , 135° )(即光谱仪观测平面与太阳入射平面的夹角φ 为135° (背向太阳方向), 光谱仪观测与海面法线方向的夹角θ 为40° )的观测几何进行水体光谱观测。 该观测几何被认为能最大程度地减小船体自身以及太阳直射反射的影响。
现场水体光谱连续观测能够获取不同地方时(太阳角度发生变化)的大样本水体反射光谱, 丰富对水体二向反射特征的认识, 并建立更精确的反演模型, 在水色遥感研究中具有极其重要的作用。 目前多采用浮标[4]或航次站位[5]进行定点连续观测获取水体光谱数据, 但浮标观测限于空间位置, 无法获取整个更广泛水域的光谱信息。 限于河道宽度、 河道走向、 岸线遮蔽等条件, 采用走航倾斜观测方式, 需不断调整观测位置和方位, 也难以实施连续走航观测。 鉴于此, 设计了一种基于垂直观测几何方式的内陆河道表层水体反射光谱连续走航快速观测方法, 并通过时空匹配技术获取整个河道的全波长遥感反射率数据。
陈立雄[6]等通过对不同观测几何的对比分析, 认为垂直测量的光谱反射率计算可以消除大部分不确定因素, 完全符合做反演模型的构建及水质光谱特性研究。 且多数卫星传感器的观测天顶角都接近于0, 也就是近乎垂直观测, 可见垂直观测是一种可行的测量方式。 所以针对内陆河道的特殊性, 本研究采用垂直观测来进行内陆河道的连续观测, 垂直观测无需调整测量角度, 测量的一致性能够保证且稳定性较好。
为了探讨快速连续走航的可行性, 以典型内陆二类水体— — 杭州西小江为研究对象, 使用水面之上测量法的垂直观测几何分别对水体反射光、 天空光和灰板进行连续走航观测, 然后利用计算获得的水体遥感反射率对西小江的水体光谱特性进行分析; 并以遥感反射率数据与卫星定位数据的时间-空间匹配结果为基础, 通过将其与Sentinel-2B影像数据做对比, 探讨垂直走航观测产生的大样本地面实测反射率数据对验证卫星影像遥感反射率产品的可行性。
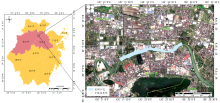
杭州西小江位于浙江省东部, 源自杭州市萧山区临浦镇的麻溪村, 流经临浦、 所前、 新塘、 衙前等镇(街道), 在绍兴市钱清镇汇入杭甬运河, 至绍兴三江附近入钱塘江, 为典型的内陆二类水体。 其中杭州段(含杭甬运河重合段)起自临浦镇白鹿塘村, 终至钱清镇西小江大桥北, 长29.75 km, 水域面积2.40 km2, 常水位3.98 m[7]。 西小江水域支流众多, 是整个蜀山平原水资源载体, 以及防汛排涝的主要承载。 随着杭甬运河改造, 以及“ 浙东引水” 工程的建设, 西小江在航运、 防洪等方面的作用逐步加强。 实测的西小江河段位于东经120° 21'— 120° 23', 北纬30° 9'— 30° 10'之间, 如图1所示。
 | 图1 研究区及观测位置图Fig.1 Study area and observation sites |
于2020年8月21日8:30— 9:30, 用三台ASD便携式野外光谱仪FiledSpec HandHeld 2 Pro, 按照规划在图1所示河段中沿河道中心进行快速连续的河道表层水体反射光谱的走航观测。 ASD便携式野外光谱仪FiledSpec HandHeld 2 Pro拥有超高的灵敏度和高出标准型5倍以上的信噪比, 且测量时间短, 非常适用于二类水体的快速遥感研究, 其波长范围为325~1 075 nm。
与观测水体光谱数据同步, 利用英国Aquaread公司生产的AP-2000多参数水质传感器及德国TriOS公司生产的荧光计系列水质分析仪采集水质成分数据。 其中AP-2000多参数水质传感器携带了水温、 pH、 浊度(turbidity)等多个探头, 荧光剂系列水质仪包括叶绿素(chlorophyll, Chl)、 蓝藻(cyanobacteria , Cyno)、 黄色物质(colored dissolved organic matter, CDOM)荧光计。 本研究选用浊度、 叶绿素浓度、 黄色物质浓度来作为水色分析参数。
在考虑二类水体水面之上测量法的基础上, 根据内陆河道的特殊性进行实测光谱仪的安置, 用于实现水体反射光谱连续走航观测。 要选择水面风浪较小时进行观测, 船体应避免摇晃, 且以匀速在河道中间行驶, 尽量避免岸线遮蔽物本身和阴影对观测的影响。
由于型号、 感光元件响应、 外接光纤等的差异, 实测前须对前期已经进行过光学标定的光谱仪再次进行标准反射板标定, 得到三台光谱仪之间的互校系数, 用于后续遥感反射率的计算, 以便减少上述因素产生的一致性偏差。
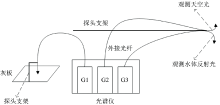
光谱采集期间, 风力小于5级, 太阳周围90° 立体角内无淡云、 卷云、 浓积云等, 光照稳定, 河面也无大的波浪。 用光谱仪在船体向阳面采用垂直几何观测进行标准灰板、 天空光和水面反射光的同步观测, 水面反射光观测按水面之上法的要求进行安置, 探头支架要置于船头, 伸出船舷外, 根据吃水线上方船体的高度及光纤探头角度, 确定伸出船舷外的长度, 以保证不受船体影响。 采用1.5 m的探头支架, 将测量天空光和水面反射光的光纤探头以180° 的竖直方向固定, 满足离水面一定距离、 无遮蔽物、 光线充足等观测条件, 且观测时间避开太阳天顶角较小的午间时段, 以减少太阳耀光的影响。 光谱实测几何示意图如图2所示。
 | 图2 河道水体反射光谱的垂直观测几何示意图Fig.2 Vertical viewing geometry of reflectance spectral measurement of river water |
选择特征波长依次查看参考板光谱、 天空光光谱和水体反射光光谱三者的突变值, 并进行对比, 以剔除由于河道上方的桥梁遮蔽所引起的异常值。 同时, 剔除受太阳耀光影响的异常水体反射光光谱及其对应的参考灰板光谱和天空光光谱。
计算遥感反射率公式如式(1)
式(1)中, Lw, Lsky和Es分别为光谱仪面向水体、 天空和标准板时的测量值, ρ p为经过严格定标的标准板反射率, ρ 为气-水界面对天空光的反射率, 依据Mobley[8]的研究, ρ 取0.020, α 和β 为实测前根据标定实验得到的互交系数。
3.3.1 时间匹配
将光谱仪观测时间设置为固定时间间隔, 但由于光谱仪记录存在数据延迟等现象, 光谱数据并未严格依据所设定的固定时间间隔进行数据采集和记录, 因此需要进行时间匹配处理。 具体操作为, 对于缺乏光谱数据记录的时刻, 采用其前后时刻的两条光谱数据的均值进行插值处理, 对于存在多条光谱数据记录的时刻, 则以该时刻内的多条光谱数据的均值进行替代处理, 由此获得固定时间间隔的光谱数据结果, 达到时间上连续观测的目的。 在本次西小江河道观测中所设定的时间间隔为1 s。
3.3.2 空间匹配
利用连续观测的卫星定位数据, 按照光谱数据时间同步处理后的时间间隔, 插值出同步的时间间隔经纬度数据, 从而实现对经纬度数据和内陆河道表层水体遥感反射率数据的时间-空间匹配, 得到在时空上连续的内陆河道表层水体遥感反射率。
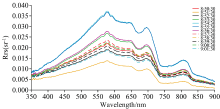
本次测量共获得933条数据, 经过异常值剔除、 计算和时空匹配, 得到西小江所测河段699秒连续的水体遥感反射率光谱。 由于350 nm之前和900 nm之后的遥感反射率的值都比较小, 且受噪声影响比较大, 因此仅显示350~900 nm之间的光谱, 后续的讨论也都是基于此波长范围进行。 限于篇幅, 无法展示全部的光谱, 选择了其中12条反射率光谱进行展示(图3), 这12条反射光谱是从早上8点50分30秒到9点01分30秒每隔1 s测量一次得到的遥感反射率曲线。 图4分别为400, 440, 550, 628, 645, 676, 706, 748和869 nm这九个特征波长的走航观测反射曲线。 时空匹配后得到特征波长处在时空上连续的内陆河道表层水体遥感反射率如图5所示。
 | 图3 时间上连续的遥感反射光谱曲线Fig.3 Continuous-time remote sensing reflectance spectral curves |
 | 图4 特征波长处的遥感反射光谱曲线Fig.4 Remote sensing reflectance spectral curves at characteristic wavelengths |
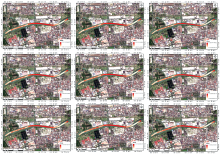
 | 图5 时空匹配后的河道遥感反射率Fig.5 Remote sensing reflectance of river water after spatio-temporal matching |
由图3、 图4可以看出, 西小江所测河段遥感反射率从蓝波段到黄波段逐渐增加, 在570 nm附近形成反射峰, 然后随着波长的增加遥感反射率减小, 在650 nm附近出现微小峰值, 在705 nm附近出现荧光峰, 在810 nm附近出现泥沙后向散射峰[9], 这些都是典型的二类水体波谱特征。
水体光谱特征是由水中各种物质对太阳光辐射的吸收和散射性质决定的, 反映了水体本身和水体中所含物质的综合信息, 影响水体信息的成分主要分为叶绿素、 无机悬浮物和黄色物质三种。
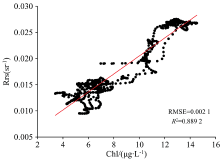
叶绿素的光谱特征主要体现在550~710 nm之间, 由图3、 图4看出, 在570 nm附近形成反射峰, 这是由于叶绿素的吸收系数在此波长附近达到最小值, 以及藻类植物细胞壁的散射作用形成[10], 该反射峰与色素组成有关; 在665 nm附近的吸收谷是由于叶绿素a在该处的强烈吸收形成; 在705 nm附近的反射峰是由于水和叶绿素的吸收系数在该处达到最小, 以及浮游植物色素的的荧光效应, 该反射峰是含藻类水体最显著的光谱特征[11], 这也正是大多数模型采用665和705 nm建立反演算法来反演叶绿素浓度[12, 13]的原因, 对实测叶绿素浓度和实测遥感反射率进行建模如图6所示, 发现在665和705 nm的确定系数R2分别达到了0.889和0.884, 可见二者有较好的关联性。
 | 图6 实测叶绿素浓度与实测遥感反射率之间的线性相关图Fig.6 Linear relationship between measured chlorophyll concentration and measured remote sensing reflectance |
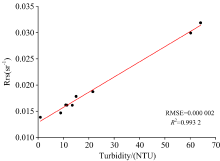
在典型二类水体中, 悬浮泥沙使得遥感反射率具有双峰特性, 第一反射峰在600~700 nm, 第二反射峰在760~820 nm, 在含沙量较低时, 第一反射峰值高于第二反射峰值[14]。 由图3、 图4看出, 在650 nm附近和810 nm附近出现峰值, 满足双峰特性, 且650 nm附近的反射峰值高于810 nm附近的反射峰值, 说明西小江含沙量较低。 水体浊度、 悬浮泥沙浓度和透明度这三个变量密切相关, 因无悬浮泥沙浓度数据, 故在本研究中, 用浊度替代悬浮泥沙浓度进行定量分析; 因AP-2000多参数水质传感器浊度探头获取的浊度数据仅为每分钟的, 所以以较合理时间段的遥感反射率均值与浊度做匹配处理, 二者相关性建模如图7所示, 发现650和810 nm的确定系数R2分别达到了0.993和0.903, 虽因数据量少, 存在一定的误差, 但也反映出二者关联性较强。
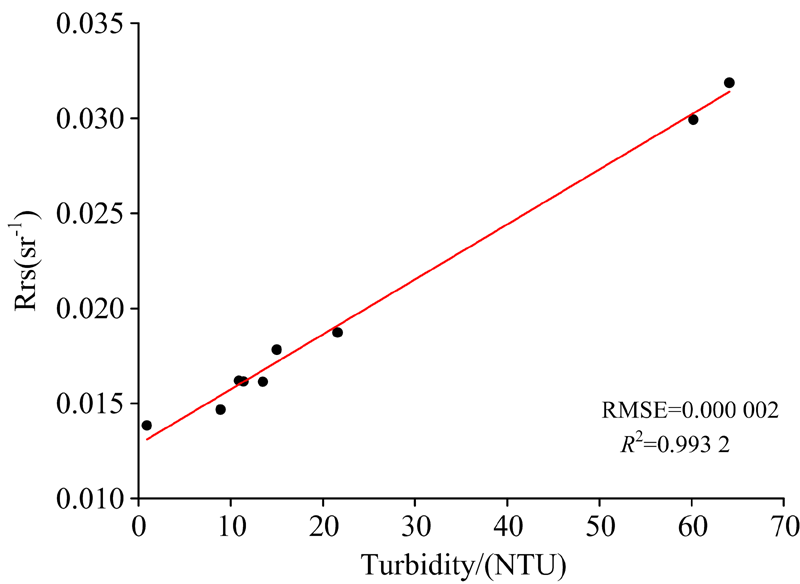 | 图7 实测浊度与实测遥感反射率之间的线性相关图Fig.7 Linear relationship between measured turbidity and measured remote sensing reflectance |
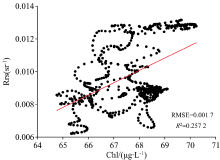
400和440 nm都曾被选为表征CDOM浓度的参数。 实测CDOM浓度和遥感反射率的线性建模如图8所示, 发现其在400和440 nm的确定系数R2仅为为0.257和0.254, 可见其二者关联性不强。 由此可见, 西小江水体遥感反射率主要受叶绿素浓度和浊度的影响, 受黄色物质的影响较小。
由时空匹配后的河道水体遥感反射率图5可以看出, 遥感反射率在各个特征波长处的变化较一致, 仅有数值上的差别。 此数据可用于卫星影像数据的校正与建模, 为此用Sentinel-2B卫星影像数据。
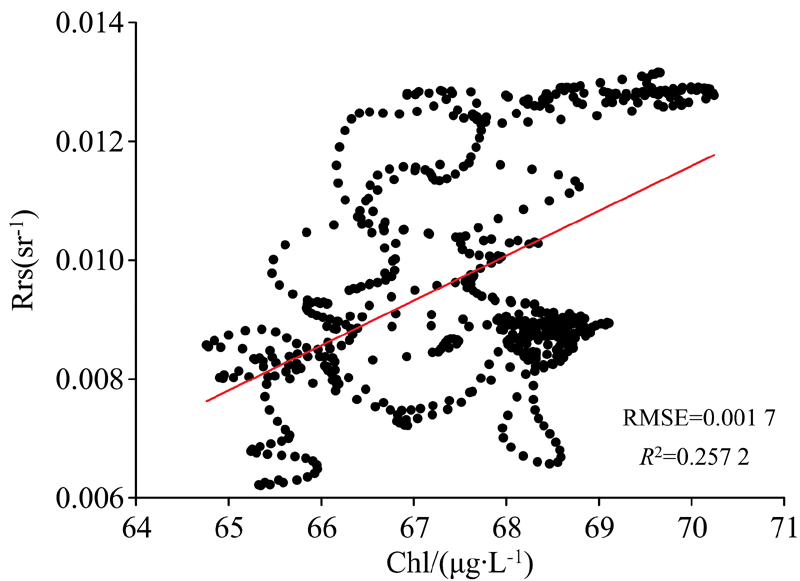 | 图8 实测CDOM浓度与实测遥感反射率之间的线性相关图4.3 遥感数据处理与分析Fig.8 Linear relationship between measured CDOM concentration and measured remote sensing reflectance |
本研究所使用的是下载于欧空局(ESA)(获取地址: https://scihub.copernicus.eu/)的2020年8月16日几乎无云的Sentinel-2B L1C和L2A数据。 Sentinel-2星座有S2-A和S2-B两颗卫星, 分别搭载一枚多光谱成像仪(MSI), 可观测从可见光到近红外的13个光谱带, 空间分辨率分别为10, 20和60 m[15]。 L1C数据是经过正射校正和几何精校正处理的大气表观反射率数据, L2A数据是经过几何精校正和辐射定标处理的遥感反射率数据, 该数据已经过Sen2Cor大气校正处理。
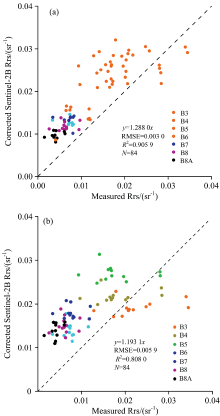
使用Sentinel-2B的光谱响应函数对实测光谱进行等效光谱模拟, 转换为相应波段的等效遥感反射率, 选用10 m空间分辨率的B3(560 nm), B4(665 nm), B8(842 nm)和20 m分辨率的B5(705 nm), B6(740 nm), B7(783 nm)和B8A(865 nm)七个波段的等效遥感反射率与经过Sen2Cor大气校正的L2A数据进行反演, 并选择所测时段中最为稳定的每分钟30秒处的值(共84个值)进行建模, 建模结果如图9(a)。 由图9(a)明显看出, 相较于实测获得的水体遥感反射率, 基于Sen2Cor的大气校正后的L2A数据除少数特例外, 整体存在明显高估现象, 其主要原因是Sen2Cor处理器的最初设计目标为陆地, 水体区域会因为日照产生太阳反射。 本研究还通过L1C数据反推辐射亮度, 再用ENVI5.3进行FLAASH大气校正获取了Sentinel-2遥感反射率数据, 如式(2)
 | 图9 (a)实测遥感反射率与Sen2Cor大气校正后的Sentinel-2B遥感反射率之间的相关性; (b)实测遥感反射率与FLAASH大气校正后的Sentinel-2B遥感反射率之间的相关性Fig.9 (a)The relationship between measured remote sensing reflectance and Sentinel-2B remote sensing reflectance after Sen2Cor at mospheric correction; (b) the relationship between measured remote sensing reflectance and Sentinel-2B remote sensing reflectance after FLAASH atmospheric correction |
式(2)中, Lλ 为辐射亮度, 单位为W· (m2· sr· μ m)-1; ρ λ 为大气表观反射率, 单位为sr-1; d为日地距离, 单位为天文单位; ESUNλ 为太阳辐照度, 单位为W· (m2· μ m)-1; θ 为太阳高度角, 单位为(° )。
计算结果与地面实测光谱反射率进行建模分析, 建模方式与图9(a)相同, 其结果见图9(b)。 由图9(b)可以看出, FLAASH大气校正后的RMSE=0.0059, R2=0.808。 可见其与Sen2Cor校正结果(RMSE=0.0030, R2=0.906)都有较高的确定系数R2。 虽然确定系数R2都相对较高, 但由图9明显看出, 基于Sen2Cor的大气校正结果存在高估现象, 基于FLAASH的大气校正结果在小于0.02 sr-1时也存在高估, 此时RMSE为0.002 7, R2达到了0.887, 但在大于0.02 sr-1时则明显低估, 这其中固然有数据获取时间不一致的因素, 但也说明现有的大气校正方法用在大样本实测数据的验证, 表现并不理想, 有关河道水体卫星影像的大气校正需要更多的研究。
针对目前倾斜定点连续观测的不足, 提出了一种基于连续走航快速观测的内陆河道表层水体反射光谱测量方法, 并以西小江部分河段实测遥感反射率数据和Sentinel-2B遥感反射率数据为例进行了可行性验证, 结果表明:
(1)用本研究提出的方法获取西小江部分河段的遥感反射率, 根据光谱特性曲线的特征, 分别对西小江河道的叶绿素浓度和悬浮泥沙进行定性分析, 其结果符合二类水体的典型波谱特征;
(2)对实测遥感反射率与实测叶绿素浓度、 浊度和黄色物质浓度进行光学参数建模, 发现叶绿素浓度、 浊度与实测遥感反射率的关联很强, 叶绿素浓度在波长665和705 nm处与实测遥感反射率的相关系数R2分别达到了0.889和0.884。 浊度在波长650和810 nm处与实测遥感反射率的相关系数R2达到了0.993和0.903。 而黄色物质浓度与实测遥感反射率的相关性不强, 即使在最能体现黄色物质的400和440 nm处, 其与实测遥感反射率的相关系数R2也只有0.257和0.254。 说明西小江所测河道的遥感反射率主要受叶绿素浓度和浊度的影响;
(3)Sentinel-2的观测天顶角接近于0, 近乎于垂直观测。 使用Sentinel-2B的光谱响应函数对实测光谱进行等效光谱模拟, 转换为相应波段的等效遥感反射率, 反演结果与Sen2Cor大气校正的L2A数据进行建模, 发现存在高估现象。 同时又用Sentinel-2B的大气表观反射率反推辐射亮度, 然后用FLAASH大气校正获取Sentinel-2B遥感反射率数据, 其结果显示, 在小于0.02 sr-1时高估, 大于0.02 sr-1时明显低估。 因此可用本研究提出的连续走航快速观测方法获取遥感反射率用于垂直观测卫星的数据反演和校正。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|