





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
红外偏振图像的舰船目标检测
[宫剑 , 吕俊伟, 刘亮, 仇荣超]
, 吕俊伟, 刘亮, 仇荣超]
, 吕俊伟, 刘亮, 仇荣超]
|
|


作者简介: 宫 剑, 1990年生, 海军航空大学博士研究生 e-mail: gongjian0811@outlook.com
红外成像系统作为探测舰船目标的一种重要方式, 在军事侦察中起着至关重要的作用, 面对复杂背景、 恶劣天气环境等情况时, 目标与背景局部对比度较低导致红外系统的探测准确率、 查全率等性能指标受到严重影响, 针对上述问题, 开展了基于红外偏振图像的舰船目标检测方法研究。 通过8~12 μm长波波段红外偏振图像采集系统实际采集86组4个偏振方向(0°, 45°, 90°, 135°)的红外偏振图像, 样本中舰船目标309个。 对同场景下不同偏振方向的红外偏振图像及红外强度/偏振度图像的目标与背景局部对比度计算, 发现海面与舰船目标偏振特征差异能够有效提高目标与背景局部对比度。 在前视红外图像中, 舰船目标通常位于海天线附近或下方, 但复杂背景及天气等因素干扰对红外图像中检测海天线影响较大, 为此提出红外偏振图像海天线检测方法, 对红外偏振图像直方图进行高斯滤波消除局部极值, 依据海面与背景的偏振特征差异, 利用双峰法阈值分割检测海天线, 最后利用霍夫变换检测海天线, 分割出海面作为目标候选区域。 针对红外偏振图像受到海杂波严重干扰的问题, 提出海杂波背景抑制算法, 采取背景抑制, 距离加权方法抑制偏振图像中杂乱的海杂波背景。 最后, 利用MSER算法检测舰船目标, 根据舰船目标特性约束条件剔除非目标区域。 对86组红外偏振图像进行舰船目标检测实验, 所提出的方法能够有效克服复杂背景和海杂波等因素的干扰准确检测海天线, 通过海杂波背景抑制及舰船特征约束的方法消除海杂波及海岸对舰船检测所带来的干扰, 检测准确率、 查全率分别为93.2%和95.7%, 优于红外舰船目标检测方法, 特别在红外图像对比度低的场景下检测效果提升明显, 检测准确率、 查全率分别提高了46.5%和16.4%。 表明充分考虑红外偏振图像中舰船目标与背景的偏振特征差异能够有效提高目标与背景的局部对比度, 有利于准确检测海天线, 提高舰船检测准确率和查全率, 对复杂背景及恶劣天气有较强的适应性, 在军事应用中具有极大应用价值, 对红外波段舰船目标检测技术的发展有着极为重要的意义。
As an important method detecting ship targets, infrared imaging system plays a vital role in military reconnaissance. In the face of complex background, bad weather environment, etc., the local contrast of target and background is low, which causes that the performance indicators of infrared system such as detection accuracy and recall rate are seriously affected. Considering the above problems, the research on ship target detection method based on infrared polarization image is carried out. Through the long-wave uncooled infrared polarization image acquisition system, 86 sets of infrared polarization images with 4 polarization directions (0°, 45°, 90°, 135° ) were collected, and 309 ship targets were sampled. For the infrared polarization image with different polarization directions, the target and background local contrast of the infrared intensity/polarization image in the same scene, it was found that the difference between the sea surface and the ship target polarization characteristics can effectively improve the target and background local contrast. In the forward-looking infrared image, the ship target is usually located near or below the sea-sky line, but the complex background and weather and other factors have a great influence on the detection of the sea-sky line in the infrared image. For this reason, the infrared polarization image sea-sky line detection method is proposed. Gaussian filtering is used to eliminate the local extremum in the histogram of polarization image. According to the difference of the polarization characteristics between the sea and the background, the sea-sky line is detected by the bimodal method threshold segmentation. Finally, the sea-sky line is detected by the Hough transform, and the sea surface is segmented as the target candidate region. Aiming at the problem that the infrared polarization image is seriously interfered by sea clutter, the sea clutter background suppression algorithm is proposed. The background suppression and distance weighting method are used to suppress the complicated sea clutter background in the polarization image. Finally, the ship targets are detected according to the MSER algorithm, after they are constrained basing on the characteristics of the ship target. The ship target detection experiment is carried out on 86 sets of infrared polarization images. The proposed method can effectively overcome the interference of complex background, sea clutter and other factors to accurately detect the sea-sky line, and the detection precision ratio and the recall ratio are 93.2% and 95.7%, respectively, which is better than the infrared ship target detection method, especially in the scene with the low contrast of infrared image. Obviously, the detection precision ratio and the recall ratio increase by 46.5% and 16.4%, respectively. The research results show that considering the difference of polarization characteristics between the ship target and the background in the infrared polarization image can effectively improve the local contrast between the target and the background, which is conducive to accurately detecting the sea-sky line, improving the ship detection precision ratio and the recall ratio, and complex background. It has strong adaptability to complex background and bad weather, which has great application value in military applications. This study has great significance for the development of ship target detection technology in the infrared band.
红外强度成像依靠目标与背景的辐射差异进行成像, 能够完成昼夜对目标进行侦察、 跟踪与制导等任务, 在军事领域有着广泛应用[1]。 目前, 基于红外图像的海上舰船目标检测方法研究成为热点, 漆昇翔等[2]设计了一种小面卷积核抑制背景并增强红外舰船目标, 采用L0梯度最小化滤波方法提取目标形状, 最后根据舰船尺度和形状特征完成检测。 刘峰等[3]通过计算协方差矩阵对可见光, 中波红外, 长波红外三个波段图像特征级融合, 采用KNN分类对舰船目标识别。 赵微等[4]提出检测舰船吃水线和动力舱作为目标要害点, 鲁棒性较强, 解决了跟踪点自动选取的问题。 但是由于海面条件的复杂性导致红外图像目标与背景的对比度低, 且随着红外伪装技术的发展, 红外强度图像难以精准检测出舰船目标。
红外偏振图像表征不同目标间反射或辐射的偏振特征差异, 为舰船目标识别提供了新的方法和途径[5]。 现阶段, 基于红外偏振图像的舰船目标检测研究相对较少, Cooper[6]对舰船目标红外偏振图像进行实验分析, 总结得出海面偏振特征较强, 而与此同时人造目标并没有表现出显著偏振特征的结论。 Zhao[7]设计了一种具有双偏振片的光学系统, 通过双偏振片角度计算模型得到最佳角度, 有效抑制太阳耀光对中波红外偏振系统探测舰船目标带来的影响。 文献[8]分别对空中的飞机, 海上的船舶, 草地上的车辆的偏振图像进行分析, 通过对海上船舶长波红外偏振图像分析, 红外偏振图像可以突显海天线, 有利于海天分割。 文献[9]针对星型水面杂波提出基于红外偏振信息的杂波抑制方法, 该方法能够有效抑制小范围星型水面杂波, 但对于大区域杂波或条形波纹抑制效果并不理想。
针对红外图像检测舰船目标对比度低的问题, 提出一种基于红外偏振图像舰船目标检测方法。 首先对相同场景下的红外强度图像与偏振图像的目标特性进行分析与比较, 根据目标与背景偏振差异, 提出红外偏振图像海天线检测方法。 为抑制海杂波对舰船检测带来的不利影响, 提出了红外偏振图像海杂波抑制算法。 最后, 应用MSER算法检测海面图像中的目标, 根据舰船特征约束剔除非舰船目标, 最终得到较为满意的检测结果。
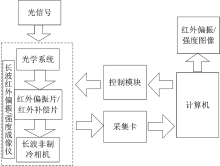
根据文献[7], 3~5 μ m中波红外波段易受到太阳耀光影响, 为避免此影响, 采用对反射耀光不敏感的8~12 μ m长波红外波段采集舰船目标图像。 如图1所示为本研究使用的红外偏振/强度图像采集系统, 其中主要设备为长波非制冷红外偏振/强度成像仪, 工作波段为8~12 μ m, 成像分辨率为644× 512。 由于长波红外热像仪光学系统口径较大, 设计了后置偏振片红外偏振采集系统, 即偏振片置于光学系统与长波非制冷红外相机之间, 偏振片采用THORLABS公司的ZnSe偏振片, 消光比300:1。 在采集偏振图像时, 偏振片透光轴垂直于海平面, 旋转偏振片至0° , 45° , 90° , 135° , 分别采集该偏振方向上的图像。 为采集同场景下红外强度图像, 且考虑到移出偏振片对光学系统的影响, 设计了与偏振片材质和厚度相同的红外补偿片, 移出偏振片的同时插入红外补偿片即可采集红外强度图像。
 | 图1 红外偏振/强度图像采集系统Fig.1 Infrared polarization/intensity image acquisition system |
偏振图像采用Stokes参量表示, 如式(1)所示
其中, Ii(i=0, 45, 90, 135)分别代表在0° , 45° , 90° , 135° 方向上的红外偏振图像。 I表示强度分量, Q表示水平、 垂直偏振分量, U表示± 45° 偏振分量, V表示圆偏振分量, 在自然界中, 通常将其近似为0。
由于偏振图像对目标的偏振角度变化较为敏感, 受噪声、 海杂波等影响较大, 偏振图像的偏振度计算如式(2)
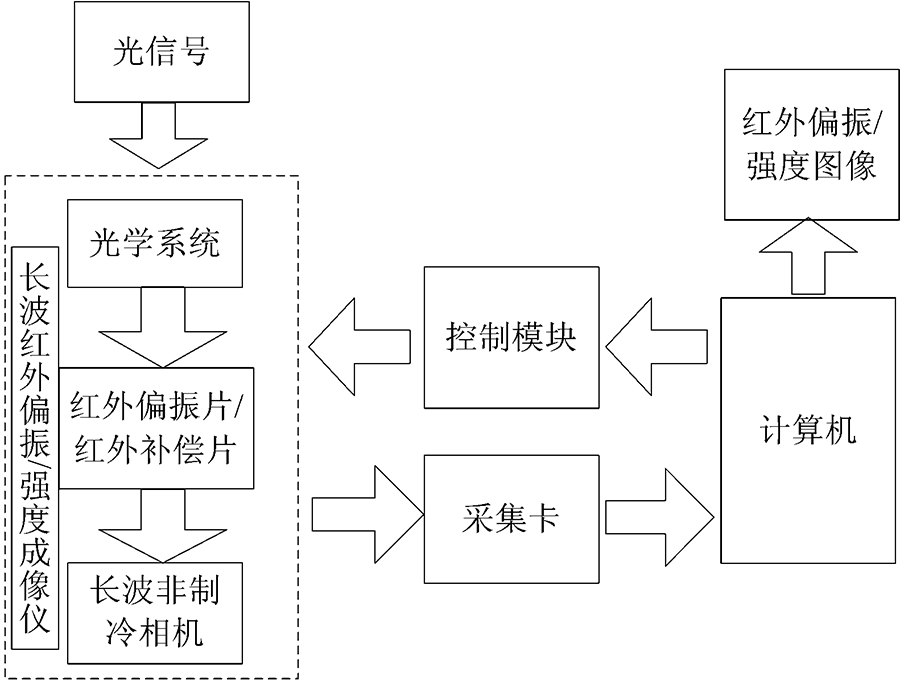
图像采集于2017年10月在烟台港附近进行, 共采集86组包括在不同天气条件, 不同距离, 不同时间段, 不同成像角度、 不同背景及不同类型舰船目标的红外偏振/强度图像。 为避免海面耀光现象带来的干扰, 所采集图像均为非太阳反射区域, 样本图像中有舰船目标309个。 如图2所示为4组不同偏振角度图像、 红外图像及其三维图像示例, 其中(a), (b), (c), (d)分别对应岛岸背景, 海天背景, 岛岸海天混合背景, 红外图像对比度低四类场景。
 | 图2 不同场景下的红外强度/偏振度图像Fig.2 Infrared intensity/polarization degree images in different scenes |
如图2所示, 根据采集到的0° , 45° , 90° , 135° 红外偏振图像, 强度图像和偏振度图像, 对其进行对比分析可以看出:
(1) 不同角度的红外偏振图像有所差异。 其中, 0° 与90° 偏振图像差异最大, 尤其在90° 偏振图像海面区域灰度值较其他偏振方向降低明显, 目标与背景对比度较高, 可以得到海面具有较强偏振特征;
(2) 通过对比红外图像和红外偏振图像及其三维图可以发现, 红外图像易受到复杂岛岸背景的影响使得目标与背景难以分辨, 导致检测舰船目标较为困难, 而红外偏振图像中天空和大多数海岸背景为低偏或无偏, 海面则偏振度较高, 这使得红外偏振图像中呈现出“ 阶梯” 状, 易于分割自然背景与海面;
(3) 目标与背景局部对比度是舰船目标检测的一个重要指标, 通常目标与背景局部对比度C0定义为[10]
式中, Lo表示被观测目标亮度, Lb表示目标附近背景亮度。
在红外偏振度图像中, 背景灰度远大于舰船目标灰度, 式(3)无法准确反映真实的目标与背景局部对比度差异, 存在一定局限性。 在此采用一种改进的目标与背景局部对比度计算方法[11], 定义为
式中, Mo表示目标灰度均值, Mb表示目标附近背景灰度均值。
由图2和表1可以看出, 在这4种场景下红外偏振度图像目标与背景局部对比度高于红外强度图像, 红外强度图像目标与背景局部对比度由0.037 6到0.469 5, 不同场景间变化范围较大, 偏振度图像目标与背景局部对比度由0.603 6到0.929 5, 每个场景保持较高的对比度, 波动较小。 对于4个场景下红外偏振度图像的目标与背景局部对比度分别是红外图像的2.66倍, 3.96倍, 1.92倍, 16.05倍, 对于红外图像对比度低图像质量差的情况, 偏振度图像局部对比度提升明显;
| 表1 不同场景下的红外强度/偏振度图像目标与背景局部对比度[11] Table 1 Target and background local contrast of infrared intensity/polarization degree images in different scenes[11] |
(4) 比较红外图像和红外偏振图像的海面背景, 由于海浪变化产生的海杂波对红外偏振度图像影响较大, 这对目标检测产生了不利影响。
红外偏振图像提高了目标背景对比度, 尤其对于红外图像对比度较低的情况, 红外偏振图像表现出更好的适应性, 大大提高了目标背景对比度。 根据岛岸、 海天背景与海面背景的偏振度可以有效地分割海天线。 但红外偏振度图像易受到海杂波影响干扰, 给舰船目标检测带来困难。
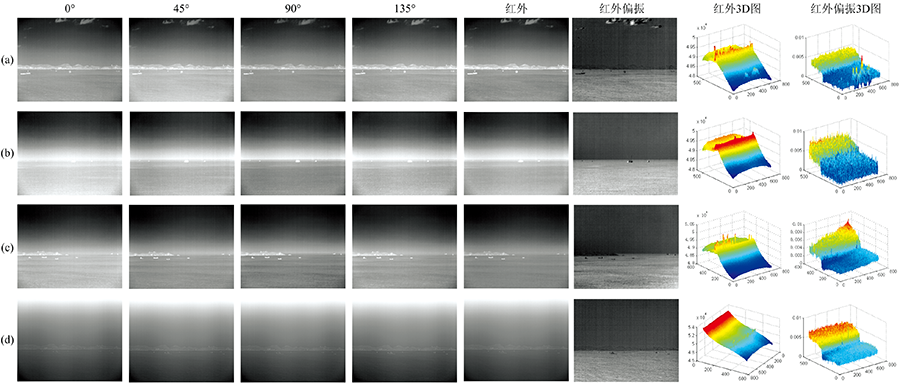
基于红外偏振图像提出舰船检测方法: 首先, 根据海面与背景的偏振差异提出双峰阈值法分割海天线; 然后, 针对复杂海杂波对舰船目标检测带来的干扰提出海杂波背景抑制算法; 最后, 应用MSER检测目标, 并根据舰船目标几何特征约束和对比度特征约束剔除误检目标, 最终得到舰船目标检测结果, 图3给出了本文舰船检测算法流程图。
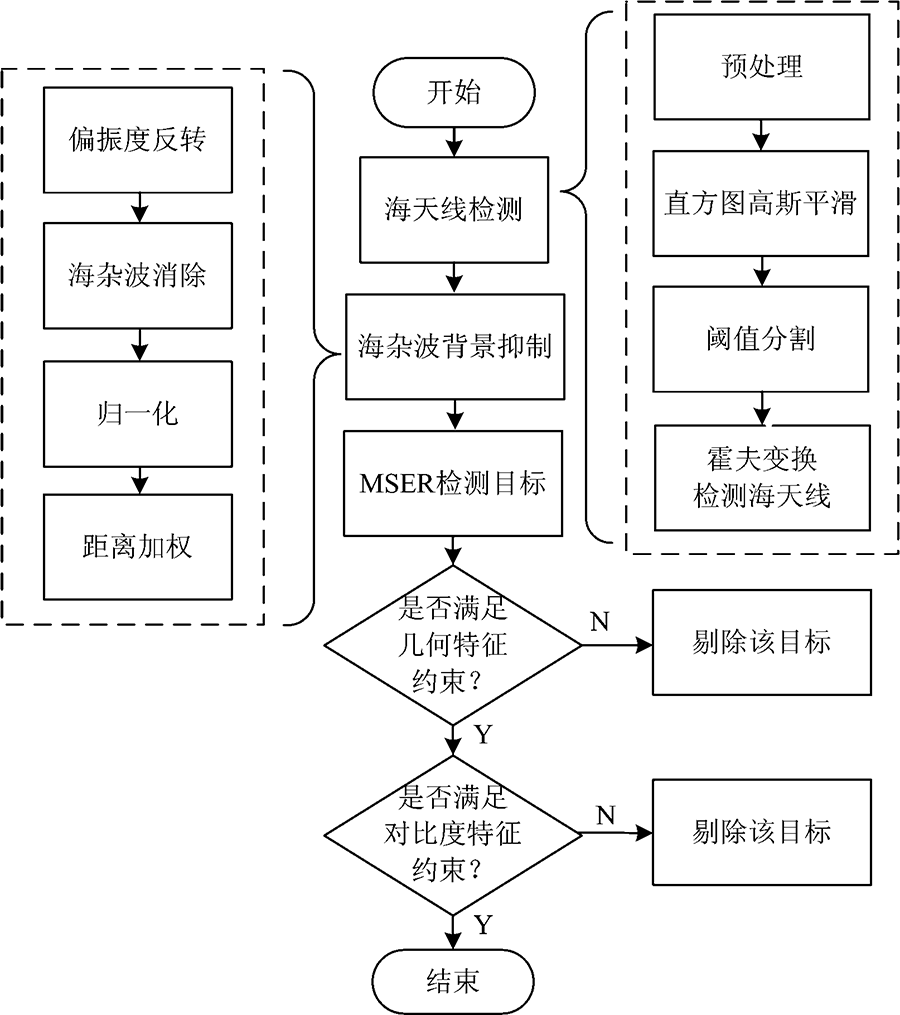 | 图3 方法流程图Fig.3 Flow chart of algorithm |
1.3.1 海天线检测
对于前视红外图像, 舰船目标的部分或整体都在海天线以下, 这使得检测海天线变得十分有意义。 海天线检测不仅可以排除岸岛或天空背景的干扰, 也大大缩小了目标搜索的范围, 大大提高了检测速度与精度。 红外强度图像在不同季节不同时间下相同场景的目标与背景的辐射强度不同, 尤其对存在复杂岛岸背景干扰及对比度较低的红外图像中检测海天线变得较为困难, 本节提出应用红外偏振图像检测海天线的方法。
Step 1 为避免红外探测器盲元及噪声对图像带来的影响, 使用5× 5模板的中值滤波器对红外偏振图像预处理。
Step 2 根据图2中对红外偏振度图像的三维图分析, 海面偏振度较高, 而背景及舰船目标偏振度较低, 且偏振度与辐射强度无关。 通过对所有采集得到红外偏振度图像直方图分析发现由于偏振差异直方图都出现“ 双峰” , 通过双峰阈值分割可以有效分割出海面从而得到海天线, 图4为4个场景下的直方图。
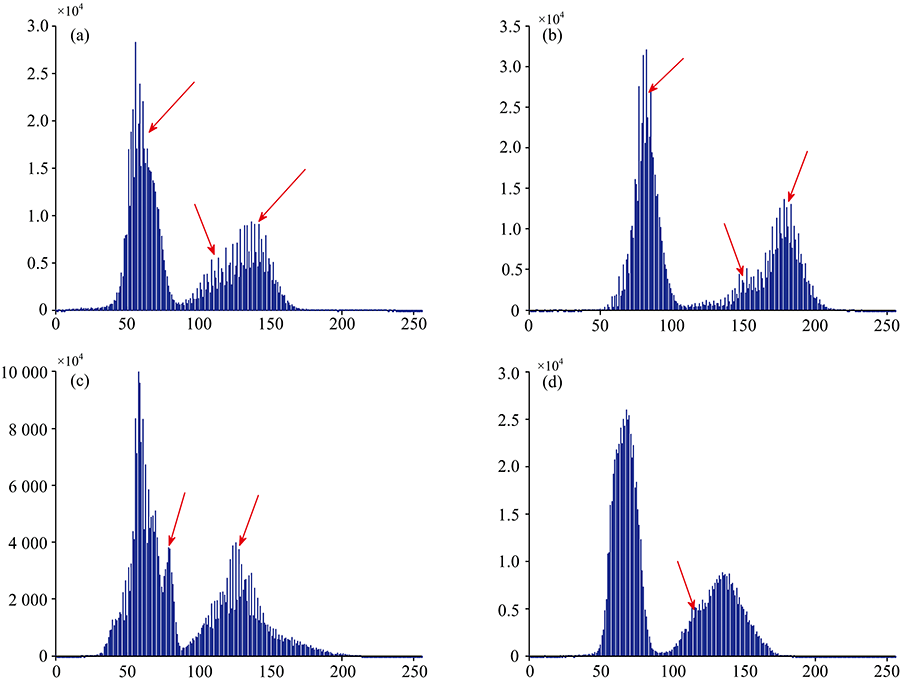 | 图4 不同场景下的红外偏振度图像直方图Fig.4 Infrared polarization degree image histogram in different scenes |
Step 3 如图4所示, 直方图中有许多局部最大值和局部最小值(红色箭头所指部分), 这对波谷阈值搜索造成较大干扰。 对直方图进行高斯滤波, 计算经高斯平滑后的直方图曲线, 搜索双峰间的波谷点作为阈值进行阈值分割。
Step 4 应用霍夫变换检测经阈值分割后图像的海天线。
1.3.2 海杂波背景抑制算法
对比图2中的强度图像与偏振度图像, 由于偏振度与反射及辐射角度密切相关, 与强度图像相比偏振图像的海杂波纹理更强, 海浪不断变化导致其产生的海杂波对舰船目标探测产生了更加不利的影响。 本节提出一种海杂波背景抑制算法, 分为以下步骤:
Step 1 由于海面的高偏振特征和舰船目标的低偏振特征, 偏振度图像中目标呈现低灰度, 背景为高灰度, 为了突出目标并抑制海杂波背景, 将海面偏振图像反转, 即目标为高灰度, 海面为低灰度, 如式(5)所示。
其中, DOP为图像偏振度, DOP1为反转图像偏振度。
Step 2 由于目标背景图像偏振特征较大差异, 舰船目标与海面不存在灰度值重叠的区域。 设图像尺寸为M× N, M为图像行数, N为图像列数, 计算海面图像列方向xi(i=1, 2, …, N)均值为X, 由于目标灰度值远高于海浪, 且目标占图像比例较小, 将偏振图像每个像素DOP1(i, j)与海面图像垂直方向均值X做差, 非正的像素为海浪背景, 灰度值置0, 得到垂直方向海杂波背景抑制偏振图像DOP'2, 如式(6)所示。 所得图像中行方向yj(j=1, 2, …, M)均值Y, 将偏振图像每个像素DOP'2(i, j)与水平方向均值Y做差, 非正的像素为海浪背景, 灰度值置0, 得到水平方向海杂波背景抑制偏振图像DOP″2, 如式(7)所示。 为减小高斯噪声对图像影响, 采用5× 5高斯模板对图像进行滤波, 最终得到海杂波背景抑制图像DOP2。
Step 3 由于在海杂波背景抑制的同时也降低了目标灰度值, 为提高目标背景对比度, 对所得偏振图像进行归一化处理, 归一化方法如式(8)
Step 4 舰船检测过程中舰船目标通常出现在靠近海天线的区域, 而偏振图像中近处海杂波大于远处海杂波, 为消除近处海杂波对舰船检测的影响, 根据偏振图像中各个像素到海天线的距离构建距离加权系数β , β 随着像素离海天线距离增加而减小。 已知海面偏振图像为DOP3(i, j)的行坐标为mi, 海面偏振图像行列分别为M, N, 则距离加权方法如式(9)
1.3.3 MSER检测及舰船目标特征约束
(1) MSER舰船目标检测
最大值稳定区域(maximally stable extremal regions, MSER)是由Matas等[12]提出的一种提取仿射特征区域的算法, 该方法提取的特征区域内部灰度变化很小, 但是和背景对比变化剧烈, 在不同阈值下特征区域能够保持形状不变。 MSER算法具有以下特性: ①图像灰度仿射不变性; ②定义变换T: D→ D, 协方差保持不变; ③在选定一个阈值区间极值区域保持稳定不变; ④由于没有平滑过程, 保留了目标更多的细节和结构; ⑤探测复杂度低, 速度快。 MSER算法中对各量的定义, 检测方法描述见文献[12], 本文不赘述。
(2) 舰船目标特征约束
对红外偏振图像应用MSER方法检测舰船目标会出现误检现象, 经过实验分析主要有两种因素: ①在分割海岸背景时, 海岸的坝和岛等边缘未被剔除, 在检测中由于其低偏振度出现误检; ②在距离目标和海天线较近区域如果海浪纹理较强将其误检为目标。 由此需要对所检测目标进行特征约束。
Ⅰ . 几何特征约束
舰船目标在侧视图中, 长宽比最大, 随着角度不断变化长宽比不断缩小, 对检测的目标区域设置长宽比阈值, 根据舰船目标特征约束剔除MSER检测结果中长宽比过大的误检区域。 如图5所示检测目标区域的长宽分别为L和W, 长宽比定义为Ratio=L/W, 根据先验知识, 剔除长宽比不满足舰船目标几何特征的非目标区域。
 | 图5 红外偏振图像舰船目标Fig.5 Infrared polarization image of the ship target |
Ⅱ . 舰船目标与背景偏振对比度特征约束
根据舰船目标与海面背景的偏振度差异, 对所检测目标的红外偏振度图像进行偏振对比度特征约束, 按比例λ 其边界扩展, 得到海面背景区域, 计算检测目标和背景的偏振图像灰度均值Mo和Mb, 应用式(3)计算目标与背景局部对比度C
对于红外偏振图像中的舰船目标而言, 其偏振度和背景偏振度差异较大, 而海浪形成的海杂波虽然形成纹理, 但与海面背景相比, 偏振度差异较小, 可以根据偏振对比度约束剔除误检目标区域。
为验证本方法在复杂环境下检测舰船目标的有效性, 对所采集到的86组场景的红外强度及偏振图像进行舰船目标检测, 文献[2]方法作为实验对比, 采用目标检测准确率及查全率[13]作为算法优良的评价指标。 仿真平台采用CORE i5-6200U 主频2.4 GHz, 内存8 G的PC电脑。
2.1.1 参数设置
实验参数设置如下: 直方图平滑的高斯窗口大小为25, σ 为4。 MSER算法设定参数如下: 灰度阈值补偿为3, 区域中包含像素个数上下门限为10~14 000, 不同阈值情况下最大区域变化范围为0.2; 边界扩展比例λ 为1.5, 舰船目标长宽比Ratio为0.5~8, 目标背景对比度阈值ε 为0.5, 剔除检测得到的非舰船目标区域。
2.1.2 海天线检测实验
根据1.1节所提出的红外偏振图像海天线检测算法, 对图2中四个场景图像进行海天线检测。 结果如图6, 其中(a)为直方图高斯平滑及搜索波谷阈值, (b)为阈值分割, (c)为霍夫变换检测得到海天线结果。
 | 图6 本算法检测海天线 (a): 直方图高斯平滑后搜索波谷阈值; (b): 阈值分割; (c): 霍夫变换Fig.6 Detecting the sea sky line by our method (a): Search for valley threshold after histogram Gaussian smoothing; (b): Threshold segmentation; (c): Hough transform |
根据图6可以看出, 直方图整体虽然体现出双峰的形状, 但是由于局部最大最小值会对波谷阈值搜索带来困难, 设计的高斯滤波器有效消除了局部极值, 能够准确搜索波谷阈值。 与阈值分割和霍夫变换检测海天线结果来看, 本方法能够准确检测海天线。
2.1.3 海杂波抑制算法及舰船目标检测实验
图7为应用本文所提算法对岛岸背景, 海天背景, 岛岸海天混合背景, 红外图像对比度低四类场景下的红外偏振图像舰船目标检测实验图。 (a), (e), (i), (m)为反转海面图像三维显示图, 由这四组图像可以看出, 由于海杂波的影响, 海浪纹理很强, 这让准确检测那些淹没在海杂波中的弱小舰船目标变得十分困难。 (b), (f), (j), (n)为海杂波抑制后的三维图像, 本文提出方法有效削弱了海杂波的影响, 但对于海杂波较强, 海浪纹理较明显的图像, 特别在此类图像距海天线较远的区域, 海杂波影响仍然较大。 (d), (h), (l), (p)为对经海杂波抑制后进行距离加权得到的三维图像, 由实验图像可以看出, 经距离加权后, 海杂波背景基本消除, 目标背景差异较大。 根据MSER检测算法, 设定合适的舰船长宽比阈值, 及目标与背景对比度约束, (d), (h), (l), (p)为最终的检测结果, 通过设定合理长宽比阈值及目标与背景对比度阈值, 剔除海岸线区域及海杂波波纹等非目标区域((l)中红色箭头所指区域), 得到最终的舰船目标检测结果, 用绿色矩形框出。
 | 图7 算法实验图 (a), (e), (i), (m)反转三维偏振图像; (b), (f), (j), (n)海杂波抑制三维偏振图像; (d), (h), (l), (p)距离加权三维偏振图像; (d), (h), (l), (p) MSER算法在剔除误检目标检测结果图Fig.7 Experimental results of our algorithm (a), (e), (i), (m) Reverse of the 3D polarization images; (b), (f), (j), (n) 3D polarization images of sea clutter suppression; (d), (h), (l), (p) 3D polarization images of distance weighted; (d), (h), (l), (p) Target detection result of MSER algorithm after eliminating false target |
将采集得到的86组图像分为岛岸背景, 海天背景, 岛岸海天混合背景, 红外图像对比度低4类场景, 分别对应场景(a)— (d), 其中场景(a)28组, 场景(b)26组, 场景(c)21组, 场景(d)11组, 共309个舰船目标。 分别对4种场景86组红外偏振/强度图像采用文献[2]方法对红外强度图像舰船目标检测和本方法对红外偏振图像进行舰船目标检测进行对比。 采用准确率precision和查全率recall两个指标评价检测性能
其中, tp表示检测正确目标个数, fp表示误检目标个数, fn表示未检测目标个数。
文献[2]提出小面卷积核抑制背景区域并增强舰船目标, 从而确定候选目标区域, 该算法检测速度较快, 但需要根据舰船尺度和形状特性完成目标检测, 海面弱小点状目标检测效果较差。 表2为本方法与文献[2]方法检测性能对比。
| 表2 本方法与文献[2]方法对比 Table 2 Comparison of our method with the reference [2] |
由表2可以看出, 对背景相对简单场景(b)本方法与文献方法检测舰船效果较好, 本方法准确率和查全率分别为95.5%和98.8%, 比文献方法高3.4%和1.2%; 受到复杂背景的干扰, 文献方法在场景(a)和场景(c)的舰船检测准确率下降到87.9%, 83.3%, 而本文方法准确率为93.9%和92.3%; 在红外图像目标与背景对比度较低的场景(d)中, 由于目标背景差异过小使得目标淹没于杂乱的背景中, 文献方法准确率下降明显, 准确率仅为41.9%, 查全率为72%, 本方法能够有效克服红外图像对比度低场景下检测率下降的问题, 准确率达到88.4%, 查全率为88.4%。 在岛岸背景, 海天背景, 岛岸海天混合背景, 红外图像对比度低4类场景中, 提出的红外偏振图像舰船目标检测方法优于文献方法, 综合准确率为93.2%, 查全率为95.7%, 尤其在红外图像对比度低场景下, 检测准确率远高于文献方法。
针对红外强度图像受到复杂环境及背景影响导致目标背景对比度下降而无法有效检测目标的问题, 提出了一种基于红外偏振图像的舰船目标检测方法。 根据海面、 目标和背景的偏振差异, 应用直方图双峰阈值法进行阈值分割并应用霍夫变换检测海天线, 分割海面作为目标区域, 提出红外偏振图像海杂波背景抑制算法, 最后通过MSER算法检测目标并使用舰船目标特征约束剔除非目标区域。 对本方法进行了仿真实验, 实验结果表明, 红外偏振图像能够有效提高目标与背景局部对比度, 在不同场景下, 本方法可以准确检测海天线, 有效抑制海杂波对红外偏振图像检测舰船目标带来的不良影响, 准确地检测出舰船目标。 本方法在岛岸、 海天、 岛岸海天背景混合及红外图像对比度低的场景下准确率和查全率优于红外图像目标检测方法, 达到93.2%和95.7%, 尤其在红外图像对比度低场景下检测效果提升明显。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|