



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于O2(0-1)谱带反演气辉层转动温度的研究
[李立城1  , 郜海阳
, 郜海阳1, 2, * , 卜令兵1 , 张其林1 , 王震1 ]
, 郜海阳, 卜令兵|
|


作者简介: 李立城, 1992年生, 南京信息工程大学硕士研究生 e-mail: lilicheng@nuist.edu.cn
中间层与低热层区域(mesosphere and lower thermosphere, MLT)处于中性大气与电离层大气之间的过渡区域, 也是中高层大气中一个重要的耦合区域。 基于自主研发的中间层顶气辉光谱光度计(mesopause airglow spectral photometer, MASP), 对其探测转动温度的反演方法进行了详细研究。 MASP的整个探测系统包括光阑、 消色差双胶合透镜、 窄带干涉滤光片、 镜头、 制冷CCD探测器, 元件之间通过黑色氧化铝套筒连接, 利用金属支架和精密的卡环将套筒和CCD探测器固定在面包板上。 外壳具有良好的隔热性能, 并配有低功率半导体TEC空调, 保证恒温在(23±0.5) ℃。 MASP的视场角为±13.6°, 探测高度为94 km左右, 观测视角投影在该高度上的天顶方向的区域直径约为44 km, 探测目标为该区域内厚度约为3~6 km气辉层的平均温度。 基于仪器的光学原理、 气辉O2(0-1)带的光谱特征以及标定后各项仪器参数, 构建了正演模型, 并从正演图像中计算出了合成光谱。 给出了反演算法的详细流程, 包括暗噪声、 宇宙射线、 月光图像和连续光谱背景杂散光的剔除方法, 同时提供了实际观测合成光谱的计算方法, 温度反演流程及其误差的评估。 2018年9月开始在南京信息工程大学观测场平台进行连续观测, 目前已经获得多组高质量的数据。 文中的观测实例展示了2次完整夜间的观测个例, 以及2018年10月间13组有效数据的平均值, 其整体变化趋势显示观测温度分布在170~220 K之间, 误差范围在±1.8~±4.3 K之间。 通过与MSISE00经验模型的数据进行对比, 温度趋势具有良好的一致性, 从而验证了反演方法的有效性和准确性。 MASP结构紧凑, 性能稳定, 后期易于维护, 适用于多台站组网观测。
The Mesosphere and Lower Thermosphere (MLT) is a transitional region between the neutral atmosphere and the ionosphere, as well as an important coupling region where many dynamic processes including gravity waves, tidal waves and planetary waves are active. Based on the Mesopause Airglow Spectral Photometer (MASP), a novel instrument developed by our group, this work provides the inversion method in detail for deriving rotational temperature from the emission of the airglow O2(0-1) band. MASP instrument consists of an aperture, a main achromatic doublet lens, a narrow-band interference filter, an imaging lens and a cooled CCD detector. The optical elements and CCD detector are connected by four black alumina sleeves which are fixed on the optical breadboard by means of several metal supports and precise clasps. The field of view (FOV) for MASP is ±13.6°, and the detection target is a thin airglow layer at an altitude of about 94 km with a thickness of 3~6 km. Thus, the area of the zenith direction projected by the FOV at this altitude is about 44 km in diameter so that MASP is designed to detect the average temperature of this area. Based on the optical principle of MASP, the spectral characteristics of the airglow O2(0-1) band and the instrument parameters by calibrations, we constructed the forward model to calculate synthetic spectrum from the forward image. We then describe the detailed process of the inversion algorithm, including the eliminations of dark noise, cosmic rays, moonlight images and background scattered signal of the continuous spectrum. In addition, the calculation method of the actual observed synthetic spectrum, the temperature inversion process and the evaluation of the error are provided respectively. The MASP has been conducting routine observations on the field platform of Nanjing University of Information Engineering since September 2018. At present, more than thirty nights of data have been obtained. The observation results in this paper show two whole night observation cases and the mean value averaged by 13 sets of valid data in October 2018. The general trend shows that the observed temperature ranges from 170 to 220 K, and the error ranges from (+1.8 K) to (+4.3 K). Compared with the data of the MSISE-00 empirical model, the temperature trend has a good consistency, which verifies the validity and accuracy of the inversion method. MASP has compact structure, stable performance and easy maintenance. It is thereforesuitable for multi-station networking observation.
中间层顶区域是整个地球大气中一个重要的能量耦合区域。 重力波、 潮汐波和行星波等许多动力学过程在这一区域十分活跃[1, 2, 3, 4]。 温度作为一种很好的示踪剂, 可以用来研究动力学过程。 此外, 一些研究发现该地区周围的温度可能具有显著的气候效应, 温室气体的增加在对流层起到了升温的作用, 但在中高层大气中可能起到冷却作用[5, 6, 7]。 因此, 为了探索这一区域的科学问题, 有必要设计一类高效的温度观测仪器, 既能够执行长期稳定的温度监测, 也具备足够的灵敏度从而用来探测各种尺度的动力过程。
目前国际上已有几类测量中间层顶区域温度的仪器, 其中一种较为简洁实用的仪器是基于光谱光度计的原理, 利用光学被动遥感技术来探测气辉辐射的转动温度。 在不同温度下, O2或OH气辉的振动和转动谱线强度之比有明显的变化, 通过探测谱线强度相对变化来反演转动温度。 其中典型的最具代表性的仪器为: 中间层顶氧气转动温度成像仪(mesopause oxygen rotational temperature imager, MORTI)和它的升级版气辉光谱温度成像仪(spectral airglow temperature imager, SATI)[8, 9]。 基于其优异的性能, MORTI和SATI已广泛应用于国际上的许多台站(如中国、 西班牙、 日本、 俄罗斯和加拿大), 用于研究中间层的小尺度动力学过程和温度长期变化趋势[10, 11, 12, 13]。 基于这一原理, 日本Shiokawa教授课题组开发了一套6通道的气辉温度光度计[14], 它使用6个窄带滤光片和一个背照式制冷CCD来测量短曝光周期内不同波段的气辉转动温度, 其光学结构更简单、 更紧凑, 因此系统各项性能更容易进行定标。 总体来看, 这类仪器结构简洁且稳定性好, 适用于组网观测, 从而为多站数据联合研究大尺度行星波和全球温度长期变化趋势提供了一个很好的机会。 目前, 使用这些仪器组成的观测网中有两个比较具有影响力, 一个是行星尺度中间层顶观测系统(the planetary scale mesopause observing system, PSMOS)和中间层大气变化观测网(the network for the detection of mesospheric change, NDMC)[15, 16]。 其中, NDMC是一个全球性质的组网项目, 其任务是促进和加强研究中间层顶区域(80~100 km)的课题组之间国际合作, 以监测全球气候变化在中间层顶区域的响应特征。 在国内, 2008年启动的“ 子午工程” 已经建成一个具备多种观测手段的空间环境监测网络, 其中的全天空成像仪或FP干涉仪, 用来探测中高层大气的温度、 风速及重力波等大气参数[17, 18]。 中国科学院国家空间科学中心徐寄遥课题组建成了国际上第一个无缝隙的全天空OH气辉探测站网[19, 20]。
在任何一个观测网中, 如何去保证每个台站中的各个仪器功能的稳定性和数据的一致性, 都是一项挑战。 因此, 仪器性能的一致性和稳定性、 数据的可靠性以及后期运维过程都是组网观测必须要考虑的问题。 正是基于这一背景, 课题组研发了一台更具实用性的中间层气辉光谱光度计(mesopause airglow spectrum photometer, MASP)。 MASP通过测量O2(0-1)带的转动谱线强度来反演温度。 MASP的所有组件都是商业化的标准器件, 使其成本更合理, 并且后期的运行和维护也更加便利, 有利于长期稳定运行。 另外, MASP配有小型半导体热电制冷器(TEC)空调, 确保整个仪器的温度恒定。 本文将详细介绍MASP的数据处理过程及温度反演的具体方法, 并给出了观测实例。
O2分子大气带(O2(b1
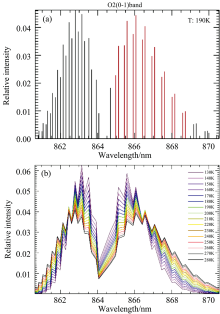
 | 图1 (a)190 K时O2(0-1)谱带谱线相对强度; (b)O2(0-1)谱带每隔10 K的转动温度相对强度变化曲线Fig.1 (a)Relative intensity of O2(0-1)band emission; (b)Relative intensity change curves of O2 (0-1) band emission at rotational temperature changing with a step of 10 K |
MASP探测仪器采用O2(0-1)带作为目标光源, 因此需要选择合适的滤光片, 通过设计成像光路能够利用光束角度的不同将多条谱线依次滤出, 通过CCD相机来获取强度。 干涉滤光片的性能对整个探测系统起着至关重要的作用, 尤其是当用作成像系统时, 还应考虑滤光片的光学参数对光线入射角度的依赖性, 随着入射角度的增大, 中心波长会向短波方向移动, 并且峰值透过率会降低。 其中, 滤光片透过率与光束入射角度及波长的关系可用式(1)表示[24]
其中θ 为光束的入射角, ne为干涉滤光片的有效折射率取2.05, FWHM为中心波长透过半高宽,
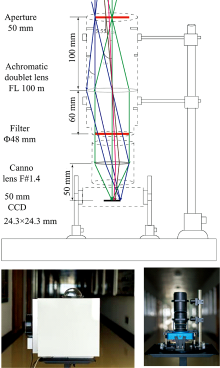
MASP的整个光路系统包括光阑、 消色差双胶合透镜、 窄带干涉滤光片、 镜头、 制冷CCD探测器, 元件之间通过黑色氧化铝套筒连接, 保证仪器有良好的密封性和遮光性, 利用金属支架和精密的卡环将套筒和CCD探测器固定在面包板上(如图2所示)。 仪器的整体体积约为30 cm× 30 cm× 42 cm, 总重量近8 kg。 为了减小滤光片的“ 温漂” 问题, 我们外加了带TEC空调的外壳, 并在内部放置了除湿剂和温湿监测仪实现实时监测。 最终仪器设计的实物图为图2。 MASP的视场角为± 13.6° , 探测高度为94 km左右, 观测视角投影在该高度上的天顶方向为直径约44 km的圆形区域, 气辉层厚度约为3~6 km。
 | 图2 MASP仪器的光路设计图和实物图Fig.2 Optical path design and physical chart of MASP instrument |
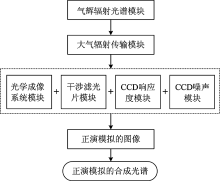
正演模型是对仪器观测过程的仿真模拟, 建立正演模型是为反演提供精确的合成光谱, 从而作为温度反演的基准参考值。 MASP的正演模型由六个子模块组成, 包括: 气辉辐射光谱模块、 大气传输模块、 滤光片模块、 光学系统成像模块、 CCD探测器响应度模块和噪声模块, 如图3所示。
 | 图3 MASP正演模型原理图Fig.3 Schematic diagram of the MASP forward model |
气辉分子光谱数据来源于HITRAN数据库[21, 22, 23]。 MASP需要130~280 K温度范围内每间隔1 K的O2(0-1)带谱线的强度分布, 有效谱线共47条。 由于谱线彼此存在相对强度的依赖关系, 因此首先把所有温度下的谱线进行归一化, 用相对强度来表示。 对于MASP光学系统来说, 每一个像素(或Bin)收集到的光强都是由47条谱线一起贡献, 不论谱线相对值的大小, 正演和反演过程中每条谱线都会考虑在内。
MASP需要探测的目标位于地表上空94 km处, 气辉光源在到达探测器前受到大气一定的衰减作用。 通常大气的衰减作用主要体现在三个方面: (1)大气气体分子的吸收作用, (2)大气的分子、 气溶胶及微粒的散射作用, (3)因气象条件所引起的衰减作用。 由于单独计算大气辐射传输是一门较为复杂的独立学科, 我们在这里忽略中间的过程, 而仅使用开源软件ARTS模拟的最终结果[25]。 另外, 目前MASP不具备在复杂天气下进行观测的能力, 因此, 也不过多地涉及大气辐射传输方面的分析和研究。
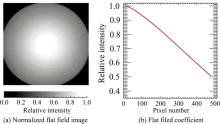
基于上一节中介绍的MASP结构, 正演模块中的滤光片模块可直接采用式(1)的结论。 而对于整体光学系统来说, 即使视场光阑为均匀的平面光源, 经过系统作用后也不可能获取强度均匀的像, 因此, 需要采用平场定标的方法来获取光学系统不同视场处的衰减规律, 如图4(a)所示, 并同时对图4(b)中平场系数进行多项式拟合, 找到衰减模型的数学表达式。 从图中结果可以看出, 视场边缘的通光量仅仅只有视场中心的约0.5倍。
 | 图4 MASP光学系统的平场定标图 (a): 原始定标图像; (b): 视场中心至边缘的平场系数Fig.4 Flat field calibration for MASP optical system (a): Original calibrated image; (b): Flat field coefficient from center to the edge of image |
CCD传感器模块主要包括仪器响应度模块和噪声模块两个部分, 其中响应度的表达式为式(2)
式(2)中, Spixel为每个像素立体角所对应的面积, Ω 为成像系统每个像素(或Bin)的立体角, nCCD为量子效率, τ sys整个系统到达CCD传感器前的透过率, Npb为拍摄时所用到CCD的像素(或Bin)个数, CADU为数模转换单元值。 噪声的来源主要来自于光源的随机散粒噪声和CCD探测器自身噪声(暗噪声和读出噪声)两个方面。
正演模型的最终目的是要模拟二维阵列CCD的图像, 因此需要从正演方程中获得每一个像素的强度值, 而且需要将前面各个子模型中的角度变量与CCD各像素位置相关联起来, 从而建立起正演方程, 即最终CCD每一个像素显示的电子计数值(或灰度值), 如式(3)所示, 在CCD上第i列及第j行像素(或Bin)的灰度值应为
式(3)中, IAIT-n是上文中提到的温度T下第n条谱线绝对强度和相对强度的乘积, Ri, j为(i, j)像素的响应度, τ f(i, j)是谱线的滤光片透过率, τ trans为大气传输透过率, A为入瞳面积, Ci, j为光学系统衰减系数, Inoise为符合正态分布的噪声计数值。 代入各个变量的值便能够获得某一像素的灰度值, 再利用计算机编程对i和j做循环赋值, 便可获得整幅模拟图像。
MASP的实验室定标是对整个仪器的各项运行性能参数进行测量。 在实验室对光学系统实际焦距、 通光孔径、 视场衰减系数、 CCD暗噪声、 读出噪声和偏置(Bias)等一系列关键参数进行了定标, 为MASP的正演模型提供真实的参数值。 MASP的仪器参数如表1所示。
| 表1 MASP的系统参数 Table 1 Important parameters of MASP |
将定标后的各项参数代入到正演方程式(3)中, 并取3 min的曝光时间, 以220 K温度为例, 利用IDL语言进行编程, 对每一个像素的信号值进行模拟计算。 在不加入噪声的情况下, 我们可以得到如图5(a)的正演图像, 图5(b)是加入噪声项并耦合入光学系统各项参数后得到的正演图像, 即需要模拟的CCD真实成像结果。 从结果中可以计算得到图像最高处的信噪比为25.4, 在峰间的低值处也能够达到6.3, 完全满足我们的设计要求。
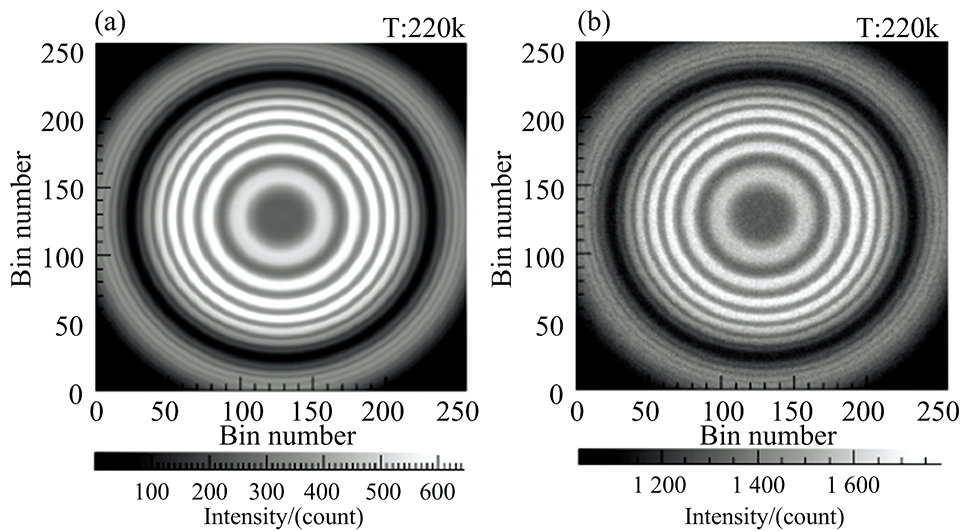 | 图5 MASP正演模拟图 (a): 220 K时纯信号值的正演图像; (b): 220 K时加入噪声项并耦合光学系统各项参数后得到的正演图像Fig.5 Simulation images from forward model (a): Simulation image of pure signal value at 220 K; (b): Simulation image by adding noise and coupling parameters of optical system at 220 K |
合成光谱是指原始光谱通过MASP光学系统调制后的二次光谱, 它既包含了仪器的信息, 也包含了原始光谱的信息。 正演模拟的最终目的就是要获取MASP的合成光谱。 基于图5(b)中的正演图像, 以图像中心作为圆环中心的实际位置(正演过程不需要计算中心), 以一个bin为宽度, 计算每一个轴对称环内所有bin值的平均值, 从而得到一条从图像中心至图像边缘的平均值廓线, 如图6(a)所示, 这便是我们需要的正演合成光谱。 图6(a)中还给出了15个不同温度下的合成光谱曲线, 为了给后续反演过程提供参考数据基础, 图6(b)给出了相应温度下合成光谱的相对值。
 | 图6 MASP正演合成光谱图 (a): 间隔10 K的合成光谱绝对强度曲线; (b): 间隔10 K的合成光谱相对强度曲线Fig.6 Synthetic spectra of forward model (a): Absolute intensity of synthetic spectrum; (b): Relative intensity change curves of synthetic spectrum at the rotational temperature changing with a step of 10 K |
MASP观测数据的反演过程实际上是通过将正演模拟的不同温度下的合成光谱与实际观察的合成光谱进行对比计算, 来获得与之差异最小时所对应的温度。 而在温度反演之前, 首先需要对原始图像进行处理, 主要包括四个过程:
(1)暗噪声的剔除: 暗噪声是实验开始及间隙通过关闭快门在相同曝光条件下暗拍摄得到, 暗噪声与偏置Bais混合在一起的, 两者相加的取值范围在1 000~1 100 Counts之间。 目前的实验过程为每隔30 min记录一次暗噪声图像, 供后续处理使用。
(2)宇宙射线的剔除: 目的在于去除观测光谱的高能粒子(宇宙射线等)在CCD图像中留下的过曝亮斑。 再减掉暗噪声图像后, 将观测图像大于1 200 counts的点剔除掉, 然后以该点周围5× 5矩阵点的平均值做平滑处理。
(3)月光图像的剔除: 在探测过程中, 月光污染程度受月相和月亮天顶角的综合影响, 要基于观测谱线强度的大小来判断月光的影响, 对于影响较大的观测图像直接舍弃。
(4)背景杂散光的剔除: MASP会受到不同程度背景杂散光的影响, 需要利用平场系数将背景光剔除, 保证数据的准确性。 在真实的观测中, 背景杂散光一方面来自于观测场周围微弱的灯光, 另一方面来自于大气对各种微弱光源的散射。 但根据实际观测, 这类杂散光均属于连续光谱, 可在后期图像处理中进行剔除。 但需要注意的是, 以往类似仪器的处理办法并未考虑到连续光谱背景杂散光也是要满足平场系数的通光量变化规律的。 以10月2日12点1分35秒拍摄的图像为例, 图7(a)和图7(b)分别给出了拍摄图像在剔除背景杂散光采用平场系数和没有采用平场系数得到的结果, 从图7(b)可以看出两者有明显的差异, 最高处甚至超过了20%, 而这么大差异在温度反演中可能会引起至少30 K的误差, 是不应该被忽略的, 所以按照平场系数来剔除背景杂散光更加合理和准确。
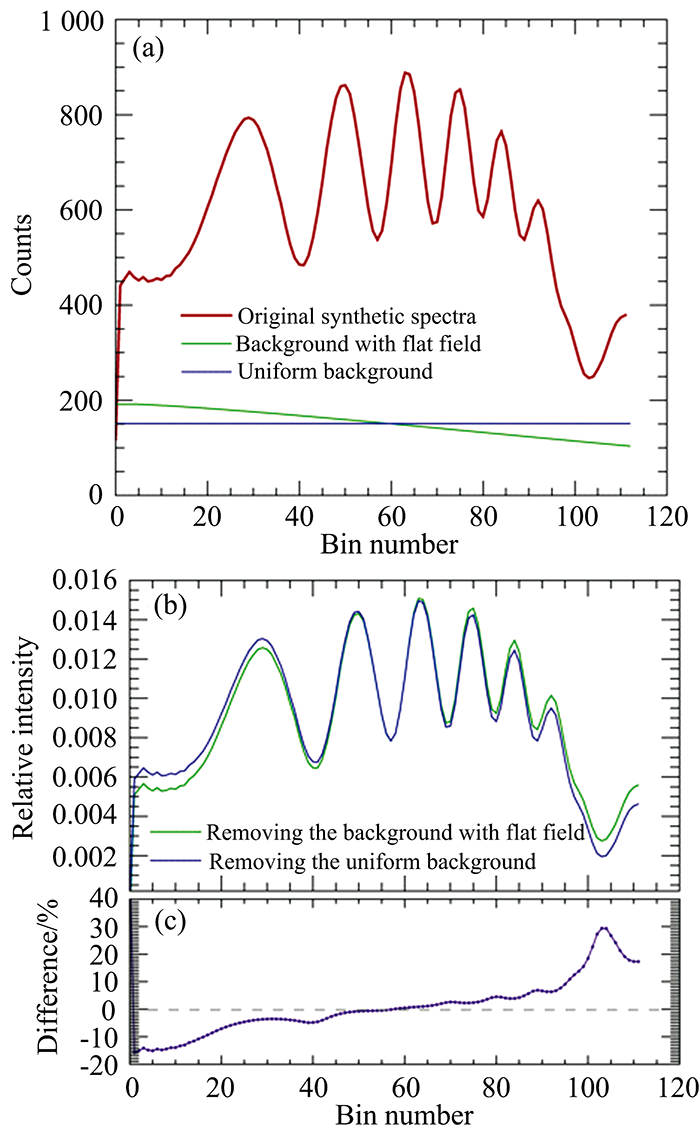 | 图7 背景杂散光处理过程 (a): 原始合成光谱; (b): 采用平场系数和未采用平场系数剔除背景杂散光的结果比较; (c): 两者的差异分布Fig.7 The process for removing background scattered signal of continuous spectrum (a): Original synthetic spectrum; (b): Comparison of the results by removing background scattered signal with and without flat-field coefficient; (c): The distribution of difference between two methods |
对原始拍摄图像进行上述的图像处理后, 就可以通过计算合成光谱来进行温度的反演。 具体过程同样以10月2日12点1分35秒拍摄的图像为例(如图8所示), 基于IDL软件的编程环境, 在进行了暗噪声、 宇宙射线及月光图像的处理后, 按照图7给出的方法对背景杂散光进行剔除, 并利用双峰拟合的办法确定环状图像的中心像素位置, 然后计算轴对称廓线的平均值, 从而获得实际观测的合成光谱。 将实际观测的合成光谱进行归一化处理, 然后计算实际观测的合成光谱与每一个温度下正演模拟的合成光谱在每一个bin中的差异的平均值。 总会存在某一个温度, 使得这一平均差值最小, 也即意味着观测值与模拟值最为接近, 对时所对应的温度, 就是我们需要反演的温度。
 | 图8 温度反演流程图Fig.8 Flow chart of temperature inversion for MASP |
需要注意的是, 图像中心部分由于每个环所包含的像素较少, 其平均值会有一定的随机误差, 如合成光谱的最左端所示。 而在合成光谱的最右端, 光学系统的像差带来的影响也比较显著, 但这部分影响目前无法有效评估。 因此, 为了排除这些不确定因素的影响, 我们截取了整个合成光谱中可靠性最高的一段数据做反演, 即bin序列数为7~80的一段(原始合成光谱总共128个bin)曲线, 并应用于所有图像中。 图8例子中, 经过反演后获得的温度为201.5 K。
经过上述步骤, 得到最终温度的同时, 还可以获得正演合成光谱与观测合成光谱的平均差异。 误差的评估是基于这个平均差异。 此外, 还需要计算最终温度下正向合成光谱与相邻温度之间的平均差异。 然后通过比较两个差分值, 得出温度反演的误差范围。 以图8的观测为例, 最终温度为201.5 K, 两个合成光谱的平均差为1.62%。 通过计算, 204.1 K的正演合成光谱与201.5 K的正演合成光谱在较高温度下的平均差为1.62%; 同理, 198.3 K曲线与201.5 K曲线在低温下的平均差也为1.62%。 因此, 误差值为(204.1~198.3)/2=2.9 K, 到目前为止, 几个月内已获得36组高质量的数据, 误差范围在± 1.8~± 4.3 K之间, 实际上很难将观测过程中的每一个影响因素都纳入误差评价中。 今后的工作还将进一步完善各种因素对误差的影响。
仪器于2018年9月开始在南京信息工程大学气象综合观测基地平台进行连续观测。 2018年10月份MASP成功的获得了13组高质量的观测数据, 观测时长分布为7~10 h。
图9(a)展示了2018年10月12日和11月1日两个整晚的观测个例, 从图中可以看出两晚的温度变化趋势存在明显差异。 10月11日晚整体温度在169~199 K之间, 在19点到次日凌晨2点时间段缓慢增温, 2点以后温度持续降低直至观测结束, 整晚的平均温度为185.4 K, 平均误差在3.8 K左右。 相比而言, 11月1日晚整体温度分布在169~211 K之间, 观测期间温度呈现出先缓慢增温再降温然后加速增温的趋势, 最终在208 K趋于平缓, 整晚的平均温度达到了191.9 K, 温度误差在3.6 K左右。 这两晚的个例都显示出了半日潮汐的特征, 另外11月1日晚的数据能够看出8小时潮汐波的趋势, 我们会在后续的研究中对其进行深入分析。
 | 图9 MASP温度反演结果 (a): 2018年10月12日和11月1日两个整晚的观测结果; (b): 2018年10月实际观测结果的平均值与MSISE-00经验模式结果对比Fig.9 Temperature inversion results for MASP (a): Two observation cases on Oct. 12 and Nov. 1, 2018; (b): Comparison of the mean observation result during Oct. 2018 with the result of MSISE-00 empirical model |
图9(b)展示了整个2018年10月份13组高质量观测数据每小时的平均值, 转动温度分布在179~201 K之间, 误差范围在± 1.6~± 4.2 K之间。 为了对比, 我们将MSISE-00模式中的温度在2018年10月间的平均日变化也展示在了图9(b)中的绿色曲线[26, 27]。 MSISE-00数据的高度截取了92~96 km范围的平均值。 由结果可以看出, MASP的观测与MSISE-00结果在量级上基本一致, 在变化趋势上都展示出半日潮汐的特征, 但其温度变化相位有着明显的差别。 MSISE-00的温度在22~23时期间出现峰值, 随后开始逐渐降低, 而MASP的温度峰值则在凌晨1点至2点之间, 两者峰值相差大于3 h。 一方面的原因主要是由于天气和月亮的影响, 实际观测并没有覆盖10月所有的夜晚及所有的时段; 另一个原因在于转动温度是基于局域热平衡的假设, 而实际上它与真正的大气温度并不完全相同。 因此, MASP的实际观测与MSISE-00的经验模型数据之间的差异是不可避免的。 在今后的工作中, 我们将与国内的激光雷达团队合作, 进行联合观测。 将MASP的数据与激光雷达数据进行对比验证是后续的一个重要研究计划。
介绍了MASP的光学结构、 正演模拟、 数据处理、 温度反演和实际的观测结果。 MASP用来测量O2气辉(0-1)带光谱的转动温度, 所有光学和机械组件都是商业标准组件, 使其成本合理, 更易于维护和更新。 MASP的外壳具有良好的隔热性能, 并配有低功率半导体TEC空调, 保证MASP的恒温为(23± 0.5) ℃。 经过平场和滤波器性能的标定, 建立了一个正演模型来模拟观测信号, 从而模拟合成光谱。 根据MASP的特点, 对数据处理进行了针对性地改进, 尤其是背景光的剔除, 并对反演误差进行了评估。 总体而言, MASP可适用于多个台站的组网装配, 从而进行长期稳定的同步组网观测。 实际的观测结果展示了2018年10月间的平均温度, 在夜间展示了较好的半日潮汐特征, 且与MSISE-00模型的比较也展示出日平均温度变化趋势的一致性。 在后续的研究中, 我们将与激光雷达进行联合观测, 进一步验证MASP数据的有效性。 另外, 我们仍然需要更久的连续观测, 从而考量全年中不同季节中间层顶的温度分布。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
|