{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于多光谱漫反射的牛肉品质参数检测方法研究
[魏文松 , 彭彦昆
, 彭彦昆* , 郑晓春, 王文秀]
, 彭彦昆, 郑晓春, 王文秀]
|
|


作者简介: 魏文松, 1989年生, 中国农业大学工学院讲师 e-mail: weiwensong8@163.com
为了满足生鲜肉品质参数无损检测领域, 对轻便式、 低成本设备的开发需求, 提出一种基于多光谱漫反射技术的生鲜肉品质检测方法。 首先根据漫反射近似理论, 结合牛肉样品散射系数、 吸收系数及折射率等参数, 在无线细垂直光束的蒙特卡洛仿真的基础上, 对具有一定发散角度LED光源进行了初始化的校正, 分别从光源照射位置概率分布、 不同角度的照射概率分布、 仰角、 方向角的概率分布、 不同角度光线入射样品时反射引起能量损失及对光子权重的影响, 得到在LED光源发散角情况下, 不同源探距下的漫反射率与检测深度, 确定了光源与检测器之间的最佳距离为15 mm, 然后根据此距离, 搭建了多光谱漫反射检测平台, 检测平台由8组中心波长为470, 535, 575, 610, 650, 720, 780和960 nm的LED光源组成, 与所要检测的生鲜牛肉品质参数相对应。 同时利用LED光源的发散角, 确定了光源到样品表面的垂直距离与每个光源的安装位置, 保证光源照射到样品的区域是均匀的。 样品的漫射光强经由信号采集与放大电路的处理后传至上位机, 并在上位机完成建模与分析。 最后为验证该检测系统的性能, 以生鲜牛肉新鲜度参数中的颜色(L*, a*, b*)与pH值为指标, 利用60个样品进行了试验, 分别得到8个光源下的原始光强值与校正后的反射率值, 然后将牛肉样品按照3∶1比例分为校正集与预测集, 针对原始光强值与反射率值, 分别利用多元线性回归(multiple linear regression, MLR), 偏最小二乘回归(partial least squares regression, PLSR)与偏最小二乘支持向量机回归(partial least-squares support vector machine, LS-SVM)三种方法, 建立各个参数在原始光强与反射率数据两种情况下的预测模型, 并得到最佳模型结果。 结果表明, 利用反射率数据建模结果均好于光强数据结果, 其中参数L*, a*, b*的MLR建模结果优于PLSR与LS-SVR, 其预测集相关系数分别为0.983 2, 0.907 2及0.935 9, 预测集误差分别为1.00, 2.14及0.67。 参数pH值的LS-SVR建模结果优于PLSR与MLR, 其预测集相关系数为0.942 0, 误差为0.19。 最后利用未参与试验的20块牛肉样品对模型进行了验证, 颜色L*, a*, b*及pH参数的预测值与实测值的相关系数均大于0.85, 结果证明, 利用多光谱漫反射技术以及所搭建的多光谱漫反射检测系统对生鲜牛肉品质参数检测是可行的, 该方法能够为设计便携式或微型化生鲜牛肉品质的无损检测仪器提供参考与依据。
In order to meet the development requirement of portable and low cost equipment in the field of non-destructive detection of fresh meat quality parameters, a new method based on multi spectral diffuse reflectance technology for fresh meat quality detection is proposed. Based on the diffusion approximation theory and combined with the sample scattering coefficient, absorption coefficient and refractive index of beef and other parameters, based on Monte Carlo simulation of thin vertical beam on the radio, on a certain divergence angle of LED light source are initialized with correction respectively from the light source position probability distribution and different angles of the irradiation probability distribution, angle, direction angle the probability distribution and different incident light angle sample reflection caused by the energy loss and influence on the photon weight, the LED divergence angle under different source detector diffuse reflectance and depth of detection distance, the optimum distance between the light source and the detector is 15 mm, then according to the distance, to build a multi spectral diffuse reflection detection platform, multi spectral detection platform by 8 groups of 470, 535, 575, 610, 650, 720, 780, 960 nm LED. The source composition corresponds to the quality parameters of fresh beef to be detected. At the same time, according to the 8 LED light source, the light source design layout structure of probe point symmetry, 8 light sources inside the probe to the detector as the center, symmetric distribution, while using LED light source divergence angle, determine the installation position of the light source to the sample surface and the vertical distance of each light source, to ensure the light source to the sample area is uniform. In addition, the probe embedded within the design of signal acquisition, amplification and transmission components, signal acquisition part uses the spectral response range of 400~1 100 nm light intensity detector, sample diffuse intensity after processing to the host computer through the signal acquisition and amplification circuit, and the software finished modeling and analysis. Finally in order to verify the performance of the detection system, with fresh beef freshness in the color parameter (L*, a*, b*) and the pH value as the index was tested using 60 samples, 8 light source under the original light intensity value and corrected reflectance values respectively, and then the beef samples according to 3∶1 the proportion is divided into set and prediction set correction, for the original value of light intensity and reflectivity values, respectively, using multiple linear regression (MLR), Multiple Linear Regression Partial Least Squares Regression partial least squares regression (PLSR) and partial least squares support vector machine regression Partial Least-Squares Support Vector Machine (LS-SVM) three methods, model parameters in the original light intensity and reflectivity data of the two cases, and get the best results. The results show that the results of modeling using reflectivity data are better than those of light intensity data. The MLR modeling results of parameters L*, a* and b* are better than those of PLSR and LS-SVR, and their correlation coefficients of prediction set are 0.983 2, 0.907 2 and 0.935 9, respectively, and the prediction set errors are 1.00, 2.14 and 0.67, respectively. The LS-SVR modeling results of parameter pH value are better than that of PLSR and MLR, and the correlation coefficient of the prediction set is 0.942 0 and the error is 0.19. Finally, using 20 pieces of beef samples which did not participate in the test to validate the model, the color of L*, a*, b* and pH parameters of the prediction value of the correlation coefficient and the measured value is greater than 0.85, the results proved that using multispectral diffuse reflection technology and building the multispectral reflectance detecting system are feasible for the detection of fresh beef the quality parameters, this method can provide reference and basis for the nondestructive testing instrument design of portable or micro fresh beef quality.
在牛肉品质的评价参数中, 颜色(L* , a * , b* )与pH值是重要的评价指标[1], 新鲜的牛肉颜色鲜亮红, 有弹性, 且呈现弱酸性, 腐败的肉品颜色发暗, 富有黏性且呈现碱性。 有研究表明, 消费者在购买肉品时候, 往往通过感官的观、 闻、 摸来评价一块肉新鲜与否, 且肉品颜色与pH值也决定了消费者的购买欲望[2, 3, 4, 5], 这种客观评价方法受主观影响较大, 评判并不准确。 传统的检测肉品颜色的方法为比色板方法, 此方法不仅误差大, 而且费时费力, 现已经被逐步淘汰。 国家标准中所采用的肉品颜色测定方法为便携式或台式色差仪[6], 肉品中pH值的测定方法利用便携式pH计插入肉品中进行测量[7], 以上国标方法虽然能够快速测定肉品颜色与pH值, 但需要在实验室进行测量或对样品有所损坏, 无法适应于各种场合, 并且所采用的检测设备价格昂贵, 不利于推广使用。
近年来, 随着光学技术的发展, 基于图谱的快速、 无损评价方法已经被广泛用于肉品新鲜度参数的检测中。 在此基础上, 国内外学者在生鲜牛肉新鲜度参数的颜色与pH值检测方面也展开了深入的研究, 并取得了一些进展。 Elmasry等[1]利用可见/近红外高光谱技术结合PLSR算法, 对牛肉的颜色、 pH值以及嫩度进行了测量, 并实现了样品信息的可视化, 各个参数的相关系数均达到0.90以上。 Stuart等[4]利用可见近红外高光谱图像技术检测牛肉的pH值, 并依次对不同品质等级的牛肉样品进行分级, 分级的正确率达到91%以上。 马世榜等[8]利用可见近红外光谱技术结合遗传算法对牛肉的pH值进行了检测, 相关系数达到0.93, 误差为0.11。 吴建虎等[9]利用高光谱散色图谱特征, 结合多元线性回归建模方法完成了牛肉颜色, pH值的建模, 相关系数均达到0.91以上。 陈坤杰等[10]利用机器视觉技术获取牛肉样品的图像信息, 并结合RGB与HIS空间颜色技术完成对牛肉品质的等级分级, 分级正确率达到95%。 以上大部分研究均依赖于昂贵的光谱仪或工业相机技术, 体积偏大, 常在实验室条件下使用, 所形成的检测系统也无法在市场进行推广使用。 因此采用一种成本低, 容易推广的生鲜牛肉无损检测系统成为检测领域新的研究方向。
本研究提出一种基于多光谱漫反射的检测技术对牛肉品质参数进行评价。 并搭建了多光谱漫反射检测系统, 利用该系统结合多光谱漫反射技术对牛肉颜色(L* , a * , b* )、 pH值参数进行了无损检测试验, 建立了相对应的评价模型, 完成对牛肉品质的快速评价。
试验采用的样品是从北京市美廉美超市购买的牛肉小黄瓜条部分, 牛肉小黄瓜条是沿臀股二头肌边缘分离出来的净肉, 主要由半键肌等肌肉组成。 所有样品在屠宰后经过24 h排酸, 去除结缔组织, 按照60 mm× 60 mm× 30 mm的尺寸进行分割, 一共61块牛肉样品, 并依次进行编号, 用密封袋保存在冷藏箱, 然后运回实验室并储存在冷藏温度4 ℃的冰箱中。 实验过程中, 每隔12~18 h, 按照编号从小到大顺序依次取出4~6块肉样, 静置于室温(24 ℃)约20 min, 然后利用多光谱漫反射检测系统进行检测。 光谱采集完成后, 立即利用标准方法对肉品颜色参数L* (明亮度)、 a* (红绿方向变化)、 b* (黄蓝方向变化)[11]及pH值进行测定。
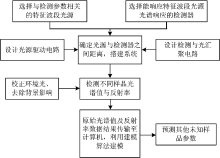
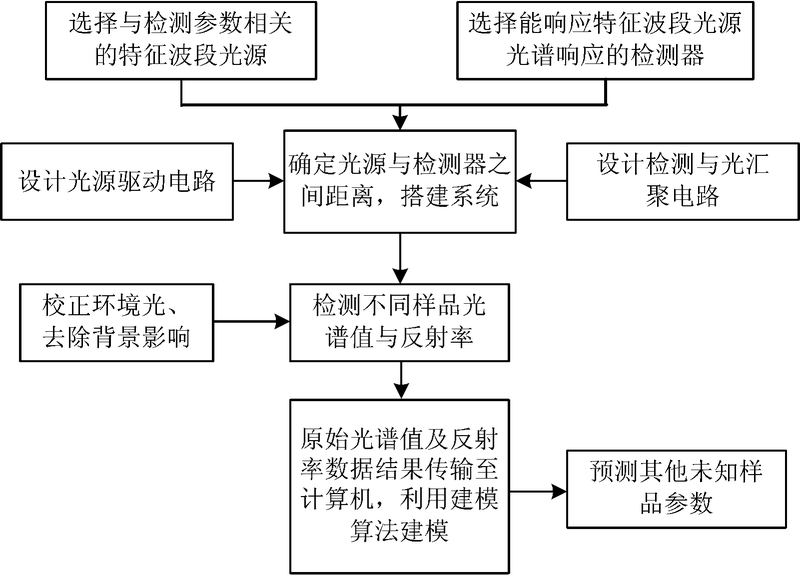
多光谱漫反射是基于近红外漫反射技术提出的, 待测物质在光谱范围内, 都具有特定的吸收波段, 根据朗伯比尔定律, 物质对光的吸收能力只与物质的厚度、 物质的浓度以及物质对光的吸收系数有关系, 而与光的强度无关。 朗伯比尔定律的适用条件是物质对光只有吸收能力的情况下。 肉品是高散射的混沌介质, 通常使用改进的朗伯比尔定律表达光与物质的相互作用[12]。 光在肉品中的传播规律符合漫射传输理论, 光束照射到肉样后, 在肉品内部会经历吸收、 散射及反射等作用, 从样品表面出射的光的强弱代表着物质与光相互作用的能力。 利用含有与物质含量有关的特征波段的光源, 设计相对应的驱动电路及检测电路, 检测这些光源与不同样品相互作用后的光强并传输至计算机进行分析, 利用数据处理算法建模后, 就能预测未知样品内部物质含量多少。 检测的基本原理如图1所示。
 | 图1 多光谱漫反射检测样品参数原理图Fig.1 Principle diagram of multispectral diffuse reflectance detecting sample parameters |
有研究表明, 在光源以垂直入射到物质并以漫反射形式检测时, 光在生物组织中的传播路径呈现香蕉状[13, 14], 且最大穿透深度DEEP满足
式(1)中, L为垂直入射的光源与检测出射光强水平距离。 L过小检测深度不够, 光谱无法检测到深层组织信息, L太大则在检测位置出射的光线强度弱, 需要检测精度及灵敏度极高的检测器才能得到有效的信息。 光子在生物组织中的传输是一个随机过程, 常用蒙特卡洛方法对其传输规律进行模拟[15]。 在大多数情况下, 蒙特卡洛方法模拟的光源是垂直光束, 得到的结果常适用于激光光束, 本研究中所采用的光源为LED光源, 具有一定的发散角, 利用垂直光束模拟出来的源探距不适用于LED光源有一定发散角的情况, 因此需要利用蒙特卡洛方法对包含有待检测参数信息的LED光源在肉品中传输情况进行分析, 并确定最佳的光源与检测器之间距离, 为搭建多光谱检测系统提供依据。
利用蒙特卡洛方法对垂直光束入射肉品进行仿真时, 首先需要初始化光子包, 包括光子包权重、 初始位置、 方向角及最小权重等。 然后计算行进步长、 方向及当前光子包能量的衰减[15]。 重复以上过程直到光子包能量被吸收或逃逸出生物组织。 对大量光子包进行模拟与跟踪后, 得到光子包在生物组织中的传输规律与不同源探距下的漫反射率, 从而为利用漫反射光检测物质含量提供依据。 在本研究中所采用的LED光源, 其光强分布呈现单峰值、 钟型与对称形状, 在不同角度下出射光线光强的概率密度函数符合高斯分布, 形如式(2)。
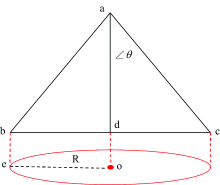
式中, θ 为LED光源出射光线与光源中心轴的夹角, 与LED光源发散角范围相对应。 在球坐标轴下, θ 也是光线与Z轴的仰角。 当光源在某个固定入射角的情况下, 光源入射到样品表面呈现环形分布, 形如图2。
 | 图2 光源入射角及入射位置示意图Fig.2 Schematic diagram of the incident angle and incident position of the light source |
图2中, ad为光源出射点距离样品表面的垂直高度, bc为入射角照射范围投影直径。 在此范围内, 以点O为中心、 R为半径的圆周是在θ 入射角情况下, 在样品表面的入射位置。 在入射角θ 固定情况下, 光线入射到半径为R的圆周上某初始点(x0, y0)的概率满足均匀分布, 其概率分布函数如式(3), 初始点(x0, y0)的分布满足式(4),
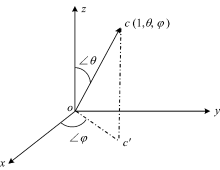
式(4)中ξ 为[0, 1]上均匀分布随机数。 且在极坐标情况下, θ 作为仰角, 其概率密度函数服从高斯分布, 如式(2)所示, 其在样品表面的入射位置服从均匀分布, 如式(3)所示。 在入射角为θ 的LED光源进行蒙特卡罗仿真时, 单位球坐标下的入射角表示为(1, θ , φ ), 如图3所示。
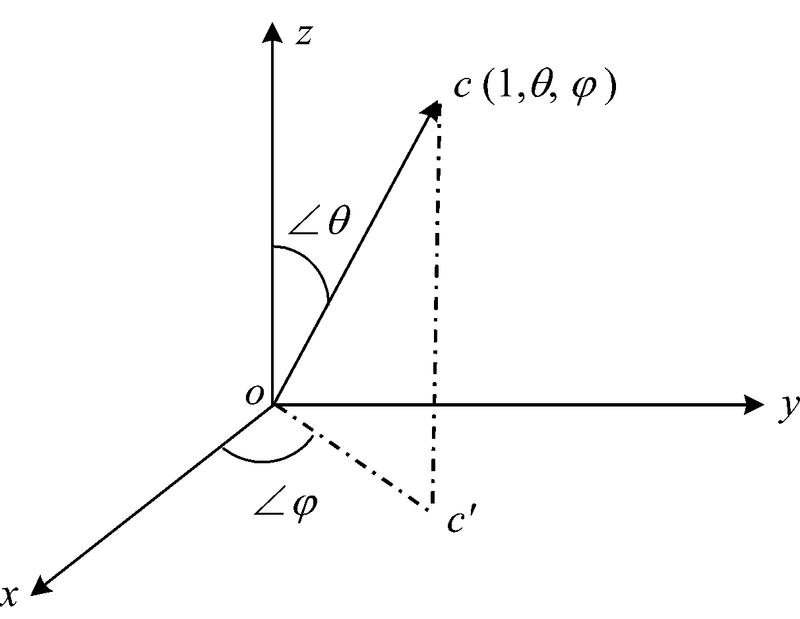 | 图3 单位球坐标下LED光源入射角示意图Fig.3 Schematic diagram of the incident angle of the LED light source under the unit ball coordinates |
其中φ 为方位角, 满足在2π 圆周范围内的均匀分布, 如式(4)所示。
式(5)中, ξ 2为[0, 1]上均匀分布随机数。
根据入射角(1, θ , φ )在球坐标下能够确定光子的方向角(θ x, θ y, θ z), 根据图3中坐标关系, 得到笛卡尔坐标(x, y, z)的值如方程组①所示。
方程组①中θ , φ 分别为仰角与方位角, 在此方程组基础上进而得到光子方向余弦[cos(θ x), cos(θ y), cos(θ z)]为方程组②所示,
根据方程组②得到方向余弦后, 再依据光子在样品表面的初始位置和迁移步长S, 能确定光子经过吸收或散射后第一步后的位置坐标(x1, y1, z1), 其满足方程组③关系。
方程组③中, 初始位置(x0, y0, z0)由式(3)和式(4)得到, 在此, 规定样品表面处为Z轴初始位置, 故z0初始值为0。 方程组③中迁移步长S满足的概率密度函数由式(6)和式(7)得到[14]
进一步可得到迁移步长S的随机抽样函数为式(7)
式(7)中, ξ 3满足[0, 1]的均匀分布, μ a与μ s分别为介质对光子的吸收系数与散射系数, 代表了光子在介质内被吸收与散射的概率。
在以上内容中, 分别确定了LED光源出射的光子入射到介质的角度范围、 入射光子的初始位置、 第一步的方向余弦以及光子经吸收或散射后第一步到达位置坐标。 在LED发散角范围内的光子入射介质时, 在介质表面易发生折射与反射, 会对光子的能量有很大影响, 需要考虑在初始方向入射到介质时候, 光子权重的变化情况。 设光子初始权重为w0=1, 光子入射介质的角度为θ , 光子在介质内折射后角度为α , 空气折射率为n0, 介质折射率为n1。 由snell定律得到角度θ 与α 的关系如式(8)所示
光子能量权重在介质表面反射后有较大变化, 入射光被界面发射的比例定义为反射比R, 且入射光分为振动平面平行于入射面的P偏振光和振动平面垂直于入射面的S偏振光。 其所对应的反射系数分别为RP与RS。 根据菲涅尔式(9)得到P分量与S分量的反射系数RP与RS后, 光子在界面反射后的权重w1变化如式(10)所示。
经过以上过程, 在LED光源具有一定入射角范围下, 对光子入射角范围、 初始位置、 方向余弦以及在界面的权重变化完成了初始化, 经过第一次吸收或散射后, 光子进入样品内部, 在内部的传输过程与光源是垂直光束的情况相类似。
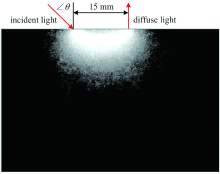
在LED光源发散角进行蒙特卡洛初始化完成后, 通过仿真就能得到在具有一定发散角度情况下, 光源与检测器之间的水平距离, 以及检测深度之间的关系。 首先根据以往文献研究[12], 设定牛肉样品的吸收系数μ a为0.015 mm-1, 散射系数μ s为2.4 mm-1, 牛肉为强散射介质, 选g为0.84, 代表光子在肉品内部散射为前向散射, 牛肉样品折射率为1.4, 光子包数目为10 000 000, 根据仿真, 在某波长下LED光源以入射角θ 入射样品时的蒙特卡洛仿真图像如图4所示。
 | 图4 以某一角度θ 入射下光子在样品内部传输图像Fig.4 Photon transmission of images within a sample at a certain incident angle |
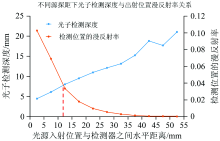
由图4可以看出, 在光子以一定角度入射到样品时, 在样品内部传输仍呈现香蕉型状, 通过在出射光附近安装检测器, 则可得到出射光强度, 并能得到出射光子比率。 同时, 记录光子到达最深位置的距离, 可记录光子的检测深度。 在LED发散角范围内, 对大量光子进行仿真得到光源与检测器不同距离下, 检测深度与出射光漫反射率的关系如图5所示。
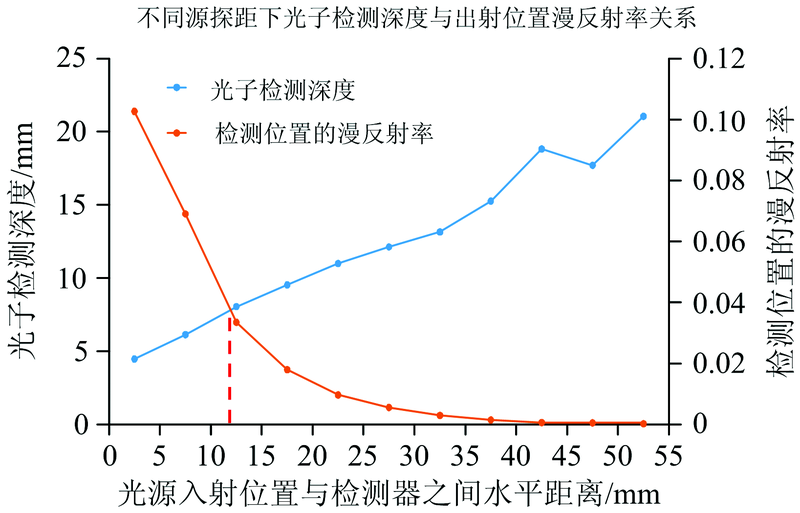 | 图5 不同源探距下光子最大检测深度与检测位置处漫反射率关系图Fig.5 Maximum detection depth of photon under different source distance and diffuse reflectance at different detection position |
由图5可以看出, 随着光源与检测器距离的增加(横坐标), 光子到达样品内部的深度逐渐增加(蓝线所示), 但检测位置处的漫反射率却不断减少(红线所示), 也就是出射光强不断减弱。 二者的交叉点(红色虚线对应位置)代表了在此距离下, 检测深度与出射漫反射率达到最佳匹配, 在本研究中, 选择光源与检测器之间水平距离为15 mm作为搭建多光谱系统的依据。
在具有一定发散角光束情况下, 光源与检测器之间的水平距离确定后, 就可搭建基于LED光源的多光谱漫反射检测系统, 其中LED光源对应肉品中待测物质特定波段的吸收峰, 检测器采集特定波段下的光的漫反射出射强度, 通过建模分析就可以评价物质含量, 进而对肉品品质进行评价。
针对肉品品质参数颜色(L* , a* , b* )和pH值, 根据文献[16], 在可见/近红外波段范围内, 其所对应的特征吸收波段主要集中在465, 486, 494, 524, 540, 575, 614, 635, 637, 645, 669, 671, 700, 703, 721, 724, 780, 954和978 nm。 由于LED光源都具有一定波段宽度, 为了将上述特征吸收波段完全覆盖, 选择峰值分别为470, 535, 575, 610, 650, 720, 780和960 nm的LED光源, 半峰宽均为40 nm, 左右各20 nm。
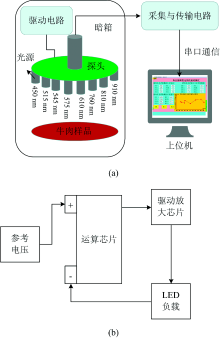
自行搭建的多光谱漫反射检测系统如图6(a)所示, 主要包括检测探头、 驱动电路、 光源、 采集与传输电路及上位机软件组成。 除了上位机软件在电脑端外, 其余检测系统封闭在暗箱里, 以隔绝外界杂散光的影响。
多光谱检测系统中, 光源驱动是重要的组成部分, 近年来LED光源因其体较小、 功耗低、 效率高被广泛应用于农业中[17]。 本研究中, 光源的驱动为恒流源电路, 以运算放大器为核心, 输入端正极以基准电压为参考, 输出端以三极管为基本放大器件, 并以输入到的LED光源负载端的支路电流为负反馈, 返回到运算放大器的输入端负极, 在LED光源两端电流变化时, 自动调节差分输入的电压大小, 保证输出端电流不变。 通过整体恒流源电路, 为不同波长下的LED光源工作时, 提供稳定电流, 保证光源持续工作在稳定的状态[11]。 基本工作流程如图6(b)所示。
 | 图6 (a) 多光谱漫反射检测系统整体结构图; (b)光源驱动电路基本工作流程图Fig.6 Overall structure diagram of multispectral diffuse reflectance detection system(a); Basic working flow chart of light drive circuit (b) |
光源系统是多光谱检测在最重要的组成部分, 直接决定了信号采集的完整性与有效范围, 在传统的近红外漫反射检测系统中, 多采用基于光纤照射的检测与接收方式, 样品的检测区域较小, 在远离样品表面时, 无法获得有效的光谱响应信号, 也无法获得大面积区域的样品光谱信息[18, 19]。 本研究根据多光谱漫反射检测样品的要求, 设计了基于LED点对称结构的光源布局, 根据1.4节分析, 在检测牛肉样品时, 光源与检测器的最佳水平距离是15 mm, 为了尽可能扩大检测样品范围。 本研究采用的检测芯片尺寸为0.9 mm× 0.9 mm(长× 宽), 根据牛肉小瓜条部分的横截面积与1.4节蒙特卡洛仿真得到的源探距的大小, 根据式(11)设计检测区域的尺寸为30 mm,
式中, f为镜头焦距, w为检测芯片尺寸宽度, W为检测样品宽度, L为镜头与样品表面的物距。 镜头焦距f=1.7 mm, 依据镜头的焦距得到最佳的物距尺寸(L)为30 mm, 样品检测区域为30 mm, LED光源发散角为30° ~45° 范围。 以上尺寸关系及光源参数确定后, 所形成的点对称光源结构在工作时, 能将样品检测区域均匀照亮, 得到大范围内的样品光强信号。
1.6.1 牛肉样品颜色测定
牛肉样品漫反射光谱采集完成后, 采用便携式精密标准色差仪器(HP-200, 上海汉谱光电科技有限公司)对肉品进行检测, 测量之前先利用设备自带的标准白板和黑腔对仪器进行校正, 然后对准样品进行检测, 得到L* , a* , b* 值。 每个样品在不同部位重复采集6次, 将6次的平均值作为样品颜色最终的理化参考值。
1.6.2 牛肉样品pH值的测定
牛肉样品颜色检测完成后, 利用穿刺型pH计(METTLER TOLEDO, 瑞士)进行测定, 使用仪器之前, 在室温25° 状态下利用pH值分别为4.01, 7.00和9.21的标准缓冲液进行校准, 直到校正系数超过0.90, 再进行样品pH值的测定。 每个样品在不同部位, 重复测量6次, 将6次平均值作为最终的理化参考值。
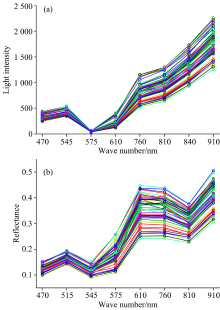
利用自行搭建的多光谱漫反射检测系统, 分别对61个牛肉样品进行光谱数据采集, 采集后的原始光强值绘制如图7(a)所示。
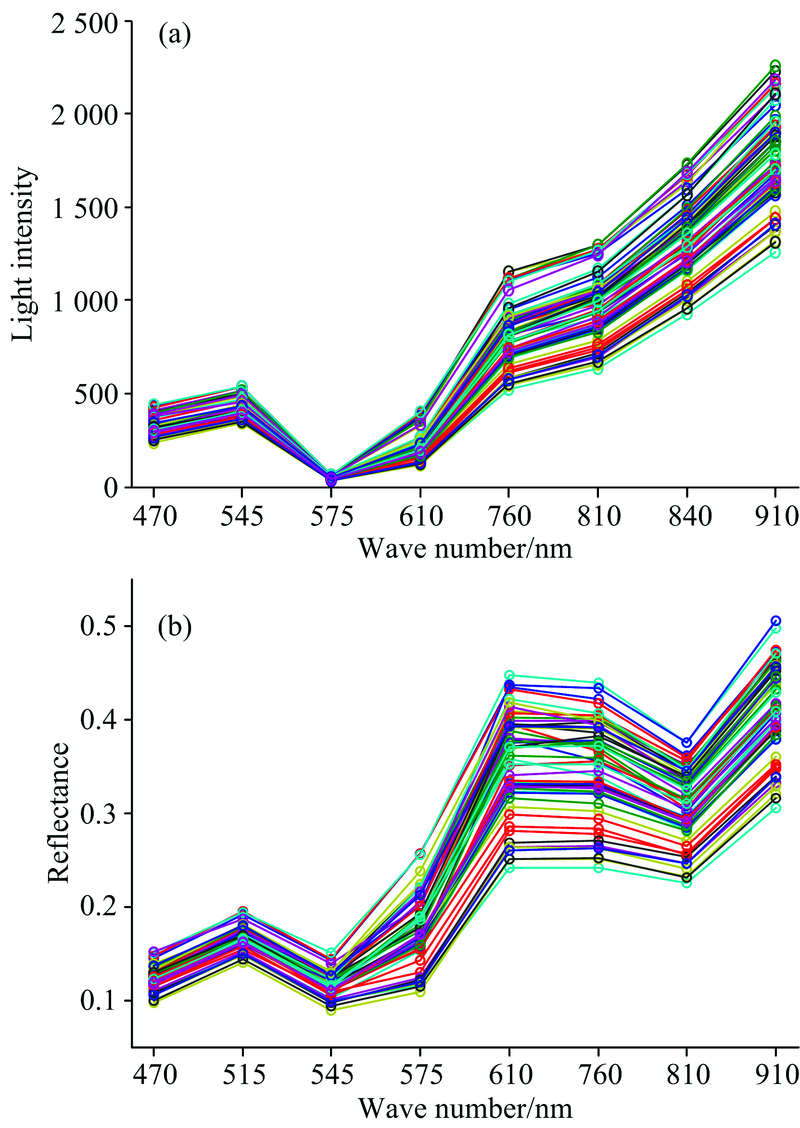 | 图7 (a) 61个牛肉样品原始光强数据; (b) 61个牛肉样品校正后反射率数据图Fig.7 Original intensity data of 61 beef samples (a) and Corrected reflectance data of 61 beef samples (b) |
从图7(a)可以看出, 不同牛肉样品在多光谱漫反射检测系统得到的数据呈现一致的规律曲线, 为了得到不同样品在不同波长下的反射率, 采集白参考和暗参考进行光谱校正[11]。 校正后得到61个光谱反射率数据, 如图7(b)所示。 从图7(b)可以看出, 不同样品的多光谱反射率数据与光强数据一样, 具有类似的分布规律。 利用多光谱反射检测系统得到61个样品的原始光强数据和反射率数据后, 就可以建立牛肉品质参数的预测模型。
将61个样品按照3∶ 1的比例随机分成校正集与预测集, 首先利用Autoscale算法对原始光谱数据范围进行标准化处理, 然后分别以8个波长下的光强数据与反射率数据为自变量, 并结合理化参考值为因变量建立模型。 分别采用MLR, PLSR及LS-SVR建立有关牛肉颜色(L* , a* , b* )与pH值的回归模型。 并比较利用光强数据建立的模型与反射率建立的模型。 利用原始光强与反射率数据建模结果如表3和表4所示。
| 表3 利用原始光强结合不同建模方法对牛肉颜色(L* , a* , b* )与pH值的建模结果 Table 3 Comparative results of beef color (L* , a* , b* ) and ph value using raw light intensity data with different modeling algorithms |
| 表4 利用反射率结合不同建模方法对牛肉颜色(L* , a* , b* )与pH值的建模结果 Table 4 Comparative results of beef color (L* , a* , b* ) and ph value using raw reflectance data with different modeling algorithms |
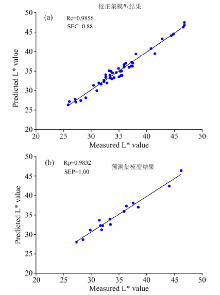
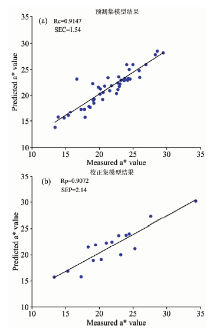
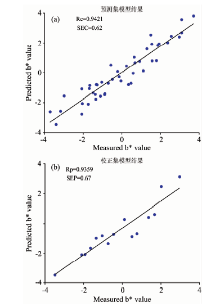
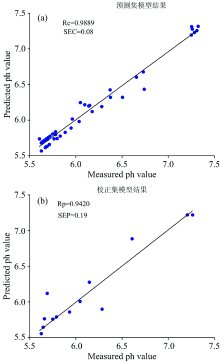
从表3和表4可以看出, 针对参数颜色L* , 无论利用光强数据建模还是反射率数据建模, MLR建模结果均强于PLSR与PL-SVR建模结果, 且反射率数据MLR建模结果最好, 其校正集相关系数Rc为0.985 6, 校正集误差SEC为0.88, 预测集相关系数Rp为0.983 2, 预测集误差SEP为1.00。 其具体建模结果如图8(a)和(b)所示。 针对参数颜色a* 和b* , 在利用光强数据建模时, PL-SVR结果好于MLR与PLSR, 利用反射率数据建模时, MLR建模结果最好, 且反射率数据建模结果好于光强数据建模结果, 其中, 参数a* 校正集相关系数Rc为0.917 4, 校正集误差SEC为1.54, 预测集相关系数Rp为0.907 2, 预测集误差SEP为2.14, 参数b* 校正集相关系数Rc为0.942 1, 校正集误差SEC为0.62, 预测集相关系数Rp为0.935 9, 预测集误差SEP为0.67。 两个参数具体建模结果分别如图9(a, b)和图10(a, b)所示。 针对参数pH值, 无论利用光强数据还是反射率数据建模, PL-SVR建模结果均好于其余两种建模方法, 且反射率数据建模结果好于光强数据, 参数pH值校正集相关系数Rc为0.9889, 校正集误差SEC为0.08, 预测集相关系数Rp为0.9420, 预测集误差SEP为0.19, 具体的建模结果如图11(a, b)所示。
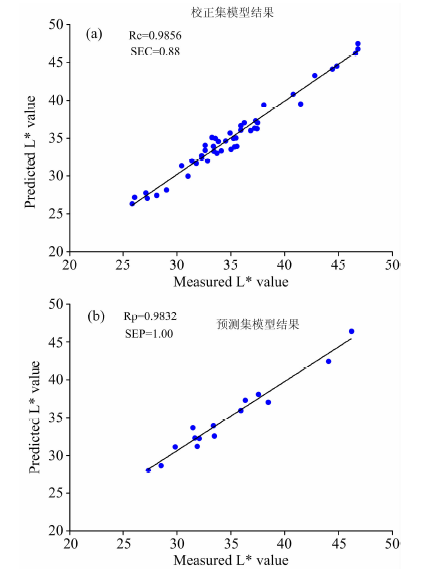 | 图8 参数L* MLR方法建模结果 (a): 校正结果; (b): 预测结果Fig.8 Modeling results of parameter L* in the calibration and prediction set based on MLR algorithm (a): Calibration set; (b): Prediction set |
从图8— 图11及结合表3和表4分析可知, 在利用多光谱漫反射系统检测牛肉品质参数中颜色L* , a* , b* , pH值时, 反射率数据建模结果均优于光强数据建模, 这是由于光强数据反映的是包含背景及环境光的信号信息, 反射率数据反映的是消除背景及环境光后的有效信号量, 因而在利用反射率数据建模结果更符合实际情况, 也比较准确。
 | 图9 参数a* MLR方法建模结果 (a): 校正结果; (b): 预测结果Fig.9 Modeling results of parameter a* in the calibration and prediction set based on MLR algorithm (a): Prediction set; (b): Calibration set |
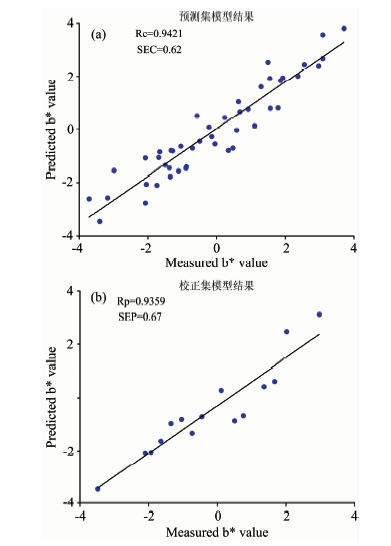 | 图10 参数b* MLR方法建模结果 (a): 校正结果; (b): 预测结果Fig.10 Modeling results of parameter b* in the calibration and prediction set based on MLR algorithm (a): Prediction set; (b): Calibration set |
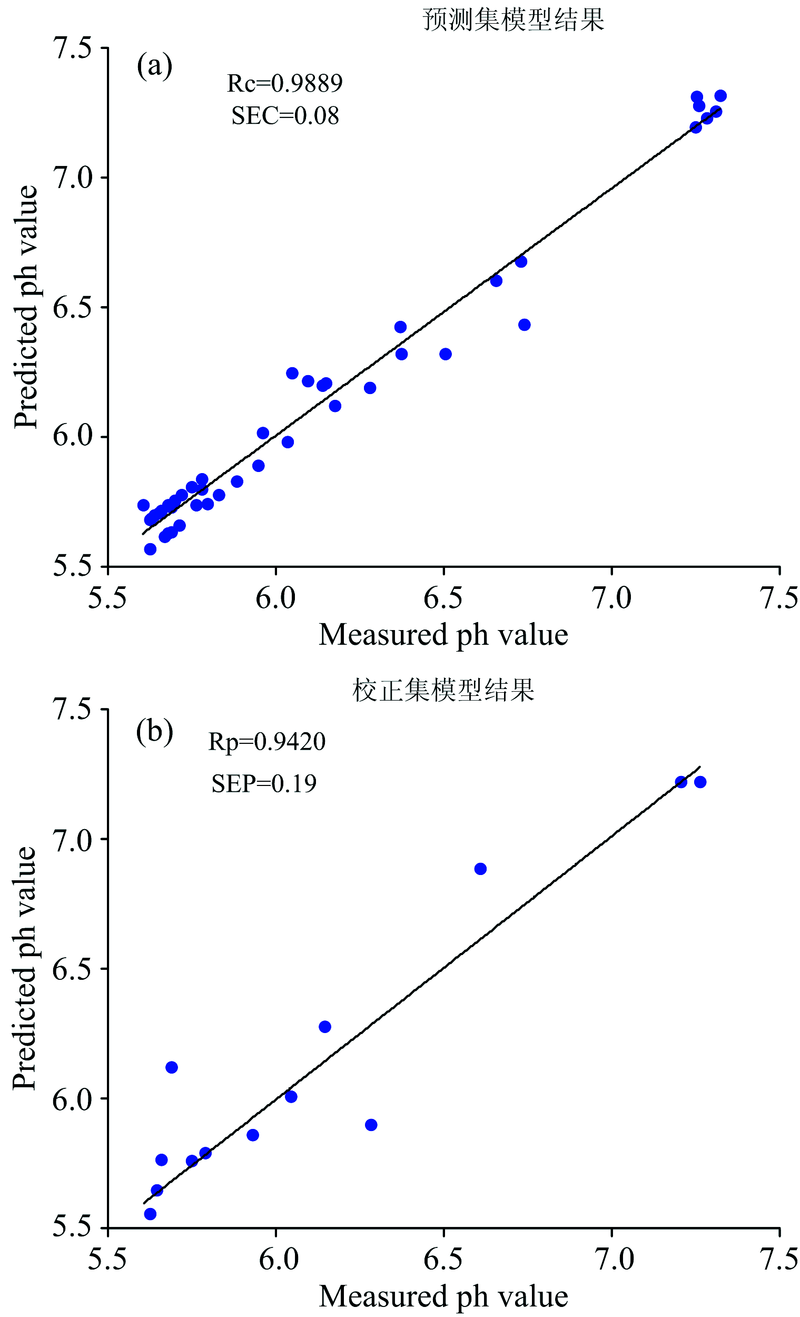 | 图11 参数pH值LS-SVR方法建模结果 (a): 校正结果; (b): 预测结果Fig.11 Modeling results of parameter pH value in the calibration and prediction set based on LS-SVR algorithm (a): Prediction set; (b): Calibration set |
基于多光谱漫反射系统建立牛肉参数中颜色及pH值的建模结果后, 为了验证系统模型的性能, 分两次分别利用未参与建模的10块牛肉样品对模型进行验证, 第一次时间2018年3月13日, 第二次时间按2018年3月15日, 共计20块样品, 利用多光谱系统得到反射率数据, 然后将反射率数据带入2.2节中所建立的预测模型中, 得到预测到的20个样品的颜色L* , a* , b* 与pH值。 利用传统方法采集样品对应的标准理化值, 并与模型预测的结果进行对比分析, 其中第一次的10个样品的颜色L* 的预测值与真实值的相关系数r为0.977 4, 均方根误差RMSE为1.15, 颜色a* 的预测值与真实值的相关系数r为0.870 9, 均方根误差RMSE为1.77, 颜色b* 的预测值与真实值的相关系数r为0.892, 均方根误差RMSE为0.82, pH值的预测值与真实值的相关系数r为0.900 8, 均方根误差RMSE为0.218。 第二次的10个样品的颜色L* 的预测值与真实值的相关系数r为0.988 1, 均方根误差RMSE为1.19, 颜色a* 的预测值与真实值的相关系数r为0.875 7, 均方根误差RMSE为1.79, 颜色b* 的预测值与真实值的相关系数r为0.891, 均方根误差RMSE为0.79, pH值的预测值与真实值的相关系数r为0.899 1, 均方根误差RMSE为0.284。 两次验证的结果证明, 系统性能与模型在预测牛肉品质参数上具有一定的稳定性, 能够满足牛肉品质参数的预测要求。
在近红外光谱技术检测原理的基础上, 对多光谱漫反射技术检测牛肉品质参数进行了研究。 利用与牛肉品质参数相关的LED光源搭建多光谱漫反射检测系统, 根据蒙特卡洛仿真分析及牛肉品质的相关折射率、 散射系数、 吸收系数等, 确定了搭建多光谱漫反射系统的最佳源探距, 并设计了基于点对称的光源探头结构及采集光路等硬件, 然后利用检测系统完成牛肉品质参数中颜色与pH值的测量。 结果表明, 基于多光谱漫反射技术得到的样品反射率数据在预测牛肉品质中颜色与pH值的结果好于光强数据, 其中颜色L* , a* 及b* 建模方法中, MLR方法最好, 其预测集相关系数分别为0.983 2, 0.907 2及0.935 9, 预测集误差分别为1.00, 2.14及0.67。 参数pH值的建模方法中LS-SVR建模结果最好, 预测集相关系数为0.942 0, 误差为0.19。 最后利用未参与实验的20块牛肉样品对模型进行了验证, 颜色L* , a* , b* 及pH参数的预测值与实测值的相关系数均大于0.85, 结果表明, 利用多光谱漫反射技术搭建的多光谱检测能够实现对牛肉品质参数的无损检测, 本系统的优点是没有复杂或昂贵的元器件, 价格便宜, 尤其在检测某些重要参数的情况下, 为以后设计便携式或手持式牛肉品质参数快速检测仪提供依据和理论基础。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|