
{kind=link}
{kind=link}
{kind=link}
{kind=link}
噪声对等光频采样调频连续波激光雷达测距精度的影响分析及实验验证
[熊星庭 , 曲兴华
, 曲兴华* , 张福民]
, 曲兴华, 张福民]
|
|


作者简介: 熊星庭, 1989年生, 天津大学精密测试技术及仪器国家重点实验室博士研究生 e-mail: 578734197@qq.com
调频连续波激光雷达具有测量范围大, 精度高, 无需合作目标等优点, 在计量学和工业现场测量中具有重要作用。 简单介绍了等光频重采样调频连续波激光雷达的基本结构和测距原理, 分析了系统辅助干涉信号和测量干涉信号中存在的主要噪声及其特点。 当系统辅助干涉信号中存在噪声时, 会造成极值点不准确并且引入测量误差。 随后, 使用Cramér-Rao下界定理评估测量干涉信号的噪声对测量结果的影响。 为了提高测量的准确性和稳定性, 基于经验模态分解的小波阈值滤波和汉宁窗带通滤波结合小波滤波的自适应滤波方法分别用来去除了辅助干涉信号和测量干涉信号中的噪声。 实验中多次测量了平面镜和多种粗糙度样块, 并使用精密导轨验证测量结果的准确性。 实验结果表明, 当被测物位于3.9 m左右时, 使用自适应滤波方法去除噪声后, 系统对反射镜和其他粗糙度样块的测量不确定度为20 μm和几十微米( K取值2), 远小于使用小波阈值滤波的方法(120 μm和几百微米)。 同时, 通过对比精密导轨位移数值和系统的测量结果, 证明了所提出的方法能够有效提高系统的测量准确性。
Because of the advantages such as the large measurement range, high accuracy and not needing cooperation target, frequency modulation continuous wave (FMCW) laser radar plays an important role in metrology and industrial measurement. This paper briefly introduces the basic structure and ranging principle of frequency modulation continuous wave laser radar, which was based on equal frequency sampling method. The main noises that exist in the auxiliary interference signal and the measurement interference signal and their characteristics were analyzed. When the auxiliary interference signal of the system was existed with noise, part of the extreme points was incorrect and the measurement error will be brought into the result. Subsequently, the Cramer-Rao lower bound was adopted to evaluate the influence of the noise that existed in the measurement interference signal. To improve the accuracy and stability of the measurement, the adaptive filtering methods of wavelet threshold filter based on EMD and Hanning band-pass filter based on wavelet filtering were used to reduce the noise existing in auxiliary interference signal and the measuring interference signal, respectively. In the experiments, a flat mirror and a variety of roughness blocks were measured very times and the correctness was verified by comparing the measured results of the system with a precision guide. Experimental results showed that:when the measured object was located at stand-off distance of about 3.9 m, the adaptive filtering methods can effectively remove the noise and the measurement uncertainty of the mirror and the roughness blocks was 20 μm and tens of microns respectively ( K=2), which was much smaller than the uncertainty of the wavelet filtering method (120 μm and hundred microns). At the same time, by comparing the displacement value of the precise guide rail and the measurement results of the system, it proves that the proposed method in this paper can effectively improve the measurement accuracy of the system.
调频连续波激光雷达具有测量范围大, 精度高, 能够实现无合作目标测量等优点, 在1~30 m的高精度测量中具有广泛的应用前景[1, 2]。 其基本原理是对发射激光的频率进行线性调制, 与回波信号干涉形成拍频信号, 通过提取拍频信号的中值频率来计算测量距离。 实际测量时, 由于激光器存在调制非线性, 极大限制了调频连续波系统的测距精度[3, 4, 5]。
为了解决这一问题, 学者提出了预校正补偿及反馈调频技术, F-P腔重采样, 非均匀时间重采样, 光频梳校正法等方法[6, 7, 8, 9, 10]。 本文采用了等光频重采样来消除激光器非线性对测量精度的影响, 该方法具有结构简单, 易操作等优点, 但需要严格控制参考光纤的温度, 湿度, 偏振态以及进行色散补偿。 此外, 辅助干涉信号极值点提取的准确性和测量干涉信号的信噪比都会影响测量的准确度和稳定性。
系统的辅助测量信号和测量干涉信号中都存在噪声, 而且主要为散粒噪声。 辅助干涉信号作为重采样的时钟信号, 滤除噪声时不能改变极值点的个数和位置关系, 且必须完全消除错误的极值点才能保证测量精度; 而测量信号的中值频率随着被测距离的变化而变化。 因此传统的巴特沃斯, 平滑滤波, 中值滤波等滤波器或者单一的小波滤波, 经验模态分解(EMD)等滤波方法都不能解决上述问题, 尤其当信噪比低于20 dB时, 上述方法滤波效果很差。 结合各种滤波器的特点并且通过大量实验, 研究一种可靠有效的自适应滤波方法很有必要。 本文深入研究了等光频重采样调频连续波系统存在的噪声, 详细分析了噪声对系统测量精度的影响, 使用自适应滤波方法分别消除测量干涉信号和辅助测量信号中存在的噪声。
调频连续波系统测距的基本结构如图1所示, 红色虚线框为测量干涉光路, 绿色虚线框为辅助干涉光路。
 | 图1 调频连续波激光雷达的结构示意图Fig.1 The structure schematic diagram of the FMCW laser radar |
测量干涉光路的输出信号为
辅助干涉光路的输出信号为
式中, Am和Aa分别为测量干涉信号和辅助干涉信号的幅值, f, f0和Δ f分别为激光器的瞬时频率, 初始频率和频率变化量, τ m和τ a分别为测量干涉信号和辅助干涉信号的时延。
令: 2π Δ f(n)τ a=π n, 则Δ f(n)=n/2τ a, n=1, 2, …, N, N为辅助干涉信号极值点个数, 则式(2)改写为
对式(3)做快速傅里叶变换(FFT)和能量重心法(ZCT)处理, 设T为所得频谱的峰值点对应的横坐标, 则
因为
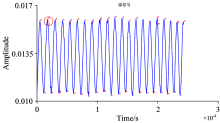
辅助干涉系统的主要噪声为光电探测器引起的散粒噪声, 属于高斯白噪声。 如图2所示, 当系统存在噪声时, 造成辅助干涉信号极值点的提取不准确(红圈部分), 影响测量精度。
 | 图2 存在噪声时数据采集卡得到的辅助干涉信号及其极值点Fig.2 Auxiliary interference signal and its extreme points which are obtained by DAC and existed with noise |
信号存在噪声时: 2π Δ f(n)τ a=(π +Δ φ (n))n, Δ φ (n)表示提取辅助干涉信号极值点的相位偏差。
则:
式(6)代入式(2), 得到
假设Δ φ (n)服从高斯分布, 令
对式(8)做FFT和ZCT处理, 设T1为所得频谱峰值点对应的横坐标, 结合式(4)得到
联合式(5)和式(9)得到
极值点相位偏差引起的测量误差为
辅助干涉信号的主要噪声为射频噪声, 且消除噪声时不能影响极值点的个数和位置关系, 所以传统的巴特沃斯滤波, 切比雪夫滤波, 窗口函数滤波等滤波方法并不适用。 而单一的小波滤波和EMD等滤波方法也无法完全去除不准确
的极值点。 本文采用了基于经验模态分解的小波阈值滤波的方法来消除噪声, 图3为去除噪声后的辅助干涉信号及其极值点。
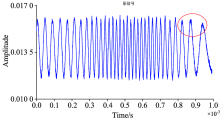
测量干涉系统的噪声主要包括: 散粒噪声, 热噪声和背景噪声。 由于背景噪声频率超出光电探测器的响应范围, 且由于本振光的能量远高于测量光和暗电流, 因此散粒噪声是测量干涉系统的主要噪声(红圈部分为噪声的影响)。
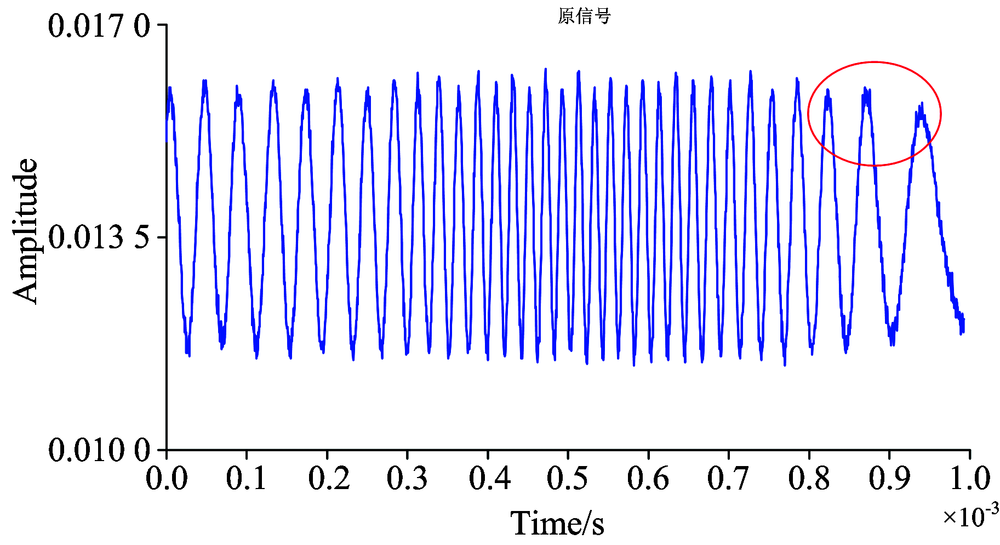 | 图4 存在噪声时数据采集卡得到的测量干涉信号Fig.4 Measurement interference signal obtained by DAC when there is noise |
测量光路的拍频信号重采样后为
令α =[am ζ φ ], 探测器得到信号为: pn=Im(n)+En, En为高斯白噪声, 数学期望为0, 方差为σ 2, 则SNR为
根据Cramé r-Rao下界定理
为了方便求解, 令: α =Qβ , 则C=Q(Iβ )-1QT, 选取
则
得到:
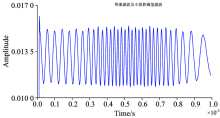
测量干涉信号在理想情况下是窄带宽的余弦信号, 其中值频率随着被测目标位置的变化而变化。 实际测量中测量干涉信号会受到系统内部噪声和外部环境噪声的影响, 特别是在回波功率很小的情况下, 微弱的拍频信号将被噪声淹没, 导致目标信息很难被有效提取。 因此在对测量干涉信号进行频率估计之前, 通常需要对拍频信号进行降噪处理, 减小噪声对有用信号的影响。 经典的信号去噪方法如FIR滤波、 IIR滤波和中值滤波等适用于信号和噪声频带重叠非常小或者是完全分开的情况, 因此并不能完全去除测量干涉信号中噪声。 本文使用了汉宁窗带通滤波结合小波滤波的自适应滤波算法来去除噪声, 图5为去除噪声后的测量干涉信号。
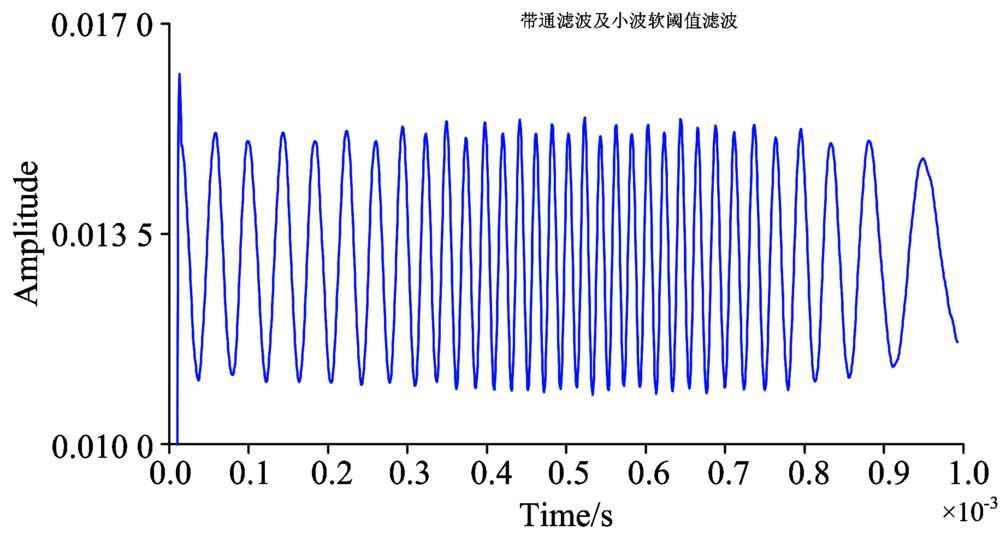 | 图5 去除噪声后的测量干涉信号Fig.5 Measurement interference signal after removing the noise |
为了验证去除噪声能够有效提高系统的测量精度, 按照图1所示的结构搭建了实验装置。 首先使用780 nm的红色激光器和精密导轨调节系统和导轨的准直性。 调节完成后, 使用夹具将被测物固定到精密导轨的滑块上。 实验时, 调谐激光器的中心频率设置为1 550 nm, 调谐范围为1 520~1 570 nm, 调制速度为10 nm· s-1, 输出功率18 mW, 实验环境的温度、 湿度、 气压稳定。 对不同的粗糙度样块, 分别进行了20次测量。 测量结果如表1所示, 表中的结果为20次测量的均值和不确定组成(k=2)。
| 表1 系统20次测量的统计结果 Table 1 Statistical result of 20 measurements using the system |
从表1的结果可以看出自适应滤波去噪后, 各种被测物的测量不确定度为几十微米, 明显小于小波去噪后的不确定度(几百微米)。 而且系统的测量不确定度随着样块粗糙度的增大而增加, 其原因为被测样块粗糙度增加时, 系统的回波信号减弱, 信噪比较低, 影响系统的测量精度。
此外两种滤波方法所得的均值不一致且差值随着样块粗糙度的增加而增大, 从几百到上千微米。 其原因为单一小波阈值滤波不能完全消除系统时钟信号中的错误极值点, 导致式(5)中的P和M都比理想值大, 根据式(10)可知此时系统的测量结果不准确。
为了验证本文提出的自适应滤波方法得到的测量结果的正确性, 使用精密导轨进行验证(精度0.1 mm)。 将被测物沿精密导轨向后移动500.0 mm, 重复上述实验, 20次测量的统计结果如表2所示。
| 表2 目标物移动500 mm后系统20次测量的统计结果 Table 2 Statistical result of 20 measurements using the system after the target moves 500 mm |
对比表1和表2的结果可知, 被测物移动500.0 mm前后, 自适应滤波去噪后结果的均值之差都为500.1 mm左右(0.1 mm为可以视为系统误差, 由系统与精密导轨不完全准直引起的误差), 而小波去噪后结果的均值之差不稳定且远大于自适应滤波去噪后的差值。 综合表1和表2的实验结果可以证明: 使用自适应滤波方法去除噪声能够有效提高系统的测量精度。
基于等光频采样的调频连续波激光雷达的基本原理, 详细分析了系统存在的噪声及其对测量结果的影响。 为了解决这一问题, 提出了综合性自适应滤波方法去除噪声。 实验结果表明, 该方法能够很好的去除噪声, 提高系统的测距精度, 在实际现场测量中具有重要意义。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|