
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
硫酸根拉曼频移用于深海热液温度探测的方法探讨
[席世川1, 3  , 张鑫
, 张鑫1, 2, 3, * , 杜增丰1 , 栾振东1 , 李连福1, 3 , 王冰1 , 梁政委1, 3 , 连超1 , 阎军1 ]
, 张鑫, 杜增丰|
|


作者简介: 席世川, 1992年生, 中国科学院海洋研究所博士研究生 e-mail: 15501265293@163.com
作为一种典型的深海极端环境, 热液区域不仅分布着各种硫化物矿产, 而且孕育着特殊的生态群落, 对热液流体理化性质的研究有助于深入了解热液的运动机制。 激光拉曼光谱技术除了定性分析方面的优势外, 已经被逐步用于定量分析, 并且在原位探测中发挥了重要作用。 该研究模拟了深海热液喷口流体的高温高压环境, 探讨了水分子和硫酸根离子的拉曼光谱在热液流体温度探测中的应用价值。 通过对水峰 ν1(H2O)、 硫酸根 ν1(S
, ZHANG Xin, DU Zeng-fengHydrothermal field is a typical deep-sea extreme environment where there are various sulfide minerals and special ecological communities. The research on the physicochemical characters of hydrothermal fluid is essential to the understanding of hydrothermal activities. The laser Raman spectroscopy has been used both at the qualitative and quantitative analysis, especially the in situ detections in the deep sea. In this paper, we simulated the hydrothermal fluid environment characterized by high temperature and high pressure, and discussed the availability of the Raman shifts of water and sulfate for detecting the temperature of the deep-sea hydrothermal fluids. The experiment results showed that the Raman shifts of the ν1(H2O) and ν1(S
硫酸根是海水的主要成分之一, 大洋水体中的平均浓度约为28 mmol· L-1 [1]。 海底热液区域作为海底极端环境的重要代表, 孕育着不依赖光合作用生存的化能自养生态系统, 是研究地球生命起源的热点区域之一, 并且蕴含着金属硫化物矿产等众多战略资源。 硫酸根是海底热液流体的重要组分之一, 主要参与热液烟囱壁的形成, 进而形成海底显著的“ 黑烟囱” 。 但是迄今为止, 海底热液活动的形成机制仍有争议, 因此作为热液流体重要成分的硫酸根对热液系统的形成与演化具有重要意义。
拉曼光谱是一种光谱探测手段, 具有无损、 非接触、 原位探测的优点, 被广泛应用到分析化学、 海洋化学[2, 3]等领域。 通常拉曼光谱经常被用来进行物质的定性分析, 可以初步判断物质的组成、 结构。 除此之外, 国内外许多学者已经开展了拉曼光谱技术的定量分析研究, 通过内标法对S
本文在实验室搭建的深海环境模拟舱内模拟了深海热液喷口流体的高温高压环境, 对不同温度(0~300 ℃)和不同压强(0~40 MPa)下的热液流体的拉曼光谱进行了研究。 探讨了热液流体温度与ν 1(S
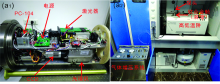
实验用的拉曼系统是基于一套可用于深海原位探测的Raman insertion Probe(RiP)系统[图1(a1)]。 系统的核心主要由3部分组成: 光源为Nd∶ YAG激光器, 波长为532 nm, 功率为100 mW; 光谱仪是定制的光谱仪(N-RXNE-532-RA-SP, KOSI, USA), 采用多路复用光栅(HoloPlexTM, KOSI, USA); CCD((DU-440 A-BV-136, Andor, UK))的像素是2 048× 512, 冷却温度是-40 ℃。 通过光谱仪分光后的光谱信号投射到面阵CCD的上下两个区域, 全波段光谱由上下两段光谱拼接而成, 因此光谱范围是100~4 325 cm-1, 分辨率为1 cm-1 [3]。
 | 图1 RiP系统及深海极端环境模拟系统Fig.1 The RiP system and simulation system for deep-sea extreme environment |
实验室用的深海极端环境模拟系统主要包括用于放置高温高压模拟热液流体(溶液)的钛合金舱、 气体增压系统和高低温阱[图1(a2)], 主要用来模拟热液喷口流体的高温高压环境, 压力范围为0~65 MPa, 温度范围为0~450 ℃, 温度控制精度为0.1 ℃。
实验分别配制了50, 100, 150, 200, 250, 300 mmol· L-1的Na2SO4溶液, 溶剂主要是蒸馏水, 溶质为硫酸钠(分析纯级, 国药集团化学试剂有限公司生产· 上海)。 拉曼光谱的采集工作在中国科学院海洋地质与环境重点实验室完成, 所用的软件是KOSI公司的HoloGRAMSTM 4.1, 曝光时间是3 s, 累计次数是4次。 拉曼系统在使用前先对其进行了校准, 氖灯主要用来进行波长校准, 并且通过标准的环己烷来进行验证, 卤素灯主要用来进行强度校准。 校准完成后, 改变溶液的温度和压力条件获得溶液的拉曼光谱。
本研究主要借助GRAMS/AI® 9.1软件以及Origin 8.1处理拉曼光谱。 所有的拉曼光谱都是基于相同的校准方式和拟合方式, 对光谱进行光滑处理、 基线校准, 最后通过高斯函数对基线校准后的拉曼峰进行拟合, 获得各拉曼峰的拉曼频移、 半峰宽、 峰高、 峰面积等重要参数。
拉曼谱线的频率虽然随着入射光频率变化, 但拉曼频移却不随入射光频率而变化, 而与样品分子的振动转动能级有关, 样品分子的振动转动能级又与温度有关, 因此拉曼频移与温度有关, 频移的变化可以反映温度的变化。
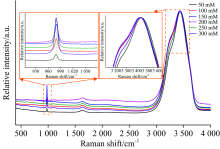
实验对深海热液喷口流体的高温高压环境进行模拟, 采集了硫酸盐溶液在0~300 ℃和0~40 MPa下的拉曼光谱。 溶液的拉曼光谱随着温度的变化表现出明显的变化(图2)。 研究拉曼频移与温度的关系时, 最重要是选择合适的参考峰。 水分子主要有2个拉曼特征峰, 分别为位于1 640 cm-1附近的对称弯曲振动(ν 2), 以及位于3 000~3 800 cm-1附近的伸缩振动。 位于3 000~3 800 cm-1的水峰主要由5个峰组成, 位于3 049 cm-1处的弯曲振动(2ν 2), 3 220 cm-1处的对称伸缩振动(
 | 图2 0.1 MPa下, 50 mmol· L-1硫酸盐溶液在不同温度下的拉曼光谱Fig.2 The Raman spectrum of the 50 mmol· L-1 sulfate with different temperatures at 0.1 MPa |
海底不同热液区域的流体中的硫酸根浓度表现出巨大的差异, “ 黑烟囱” 流体硫酸根含量普遍低, 而马努斯DESMOS“ 白烟囱” 流体中的硫酸根含量高达132 mmol· L-1。 本实验中, 通过配制不同浓度的硫酸盐溶液来观察硫酸根浓度对水峰和硫酸根的拉曼频移的影响。 结果表明不同浓度的硫酸盐溶液具有不同的拉曼特征, 尤其位于3 000~3 800 cm-1的水峰ν 1(H2O)形状变化很明显(图3), 水峰不对称性越来越明显, 这个与王乾乾[4]、 陈勇[9]的研究结果相符。
 | 图3 相同温度和压力下, 不同浓度硫酸盐溶液的拉曼光谱Fig.3 The Raman spectra of the sulfate solution with different concentrations at the same temperature and pressure |
实验中, ν 1(H2O)水峰受到溶液离子浓度的影响, 通过对
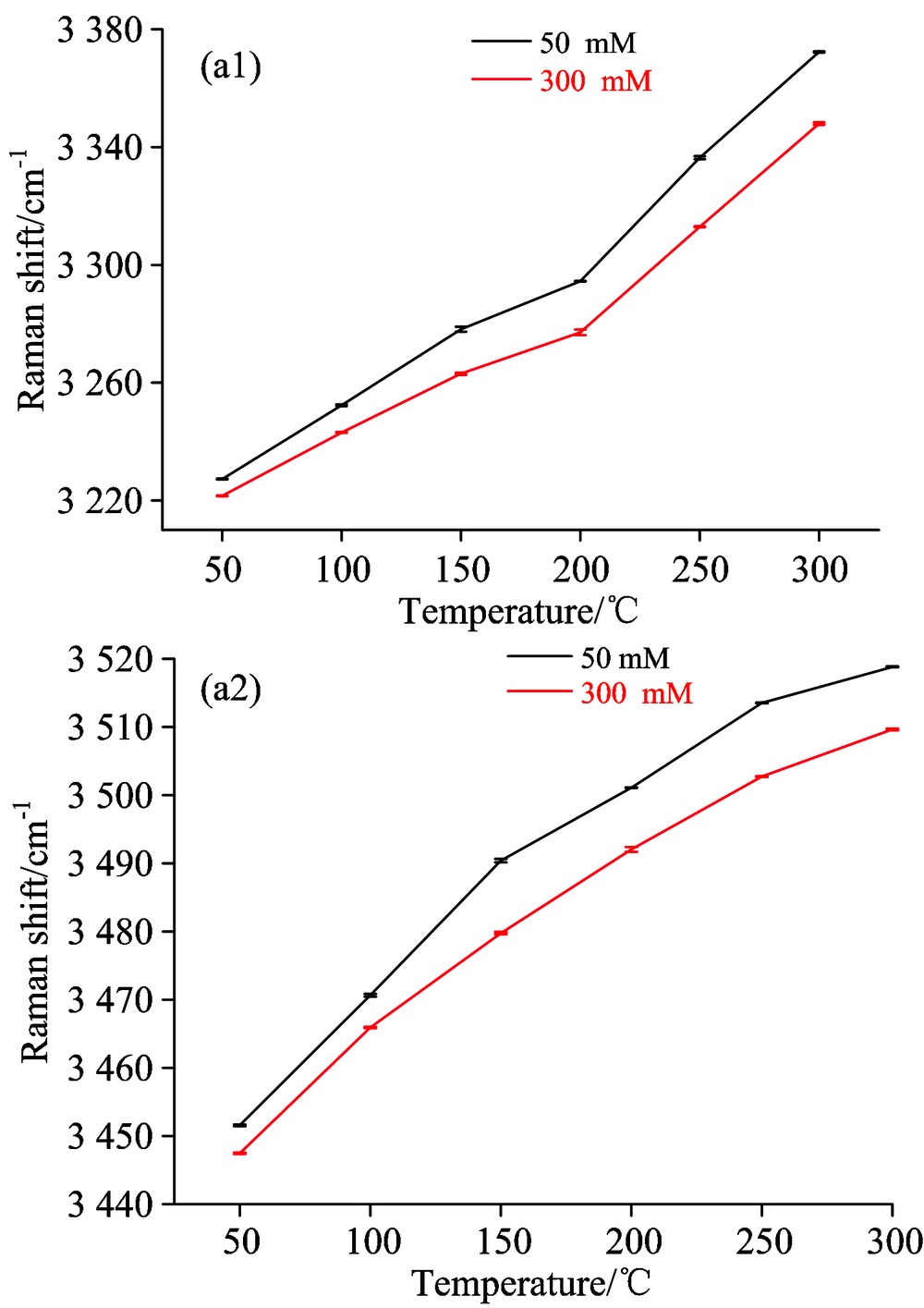 | 图4 (a1)50和300 mmol· L-1硫酸盐溶液的 |
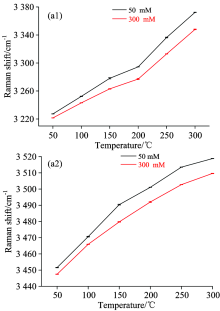
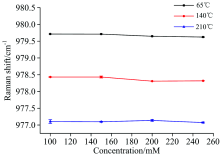
温度会对分子的转动能级产生显著影响, 进而影响分子的拉曼频移, 而S— O对称伸缩振动对温度的影响敏感, 温度上升时, S— O键振动变弱, 因此ν 1(S
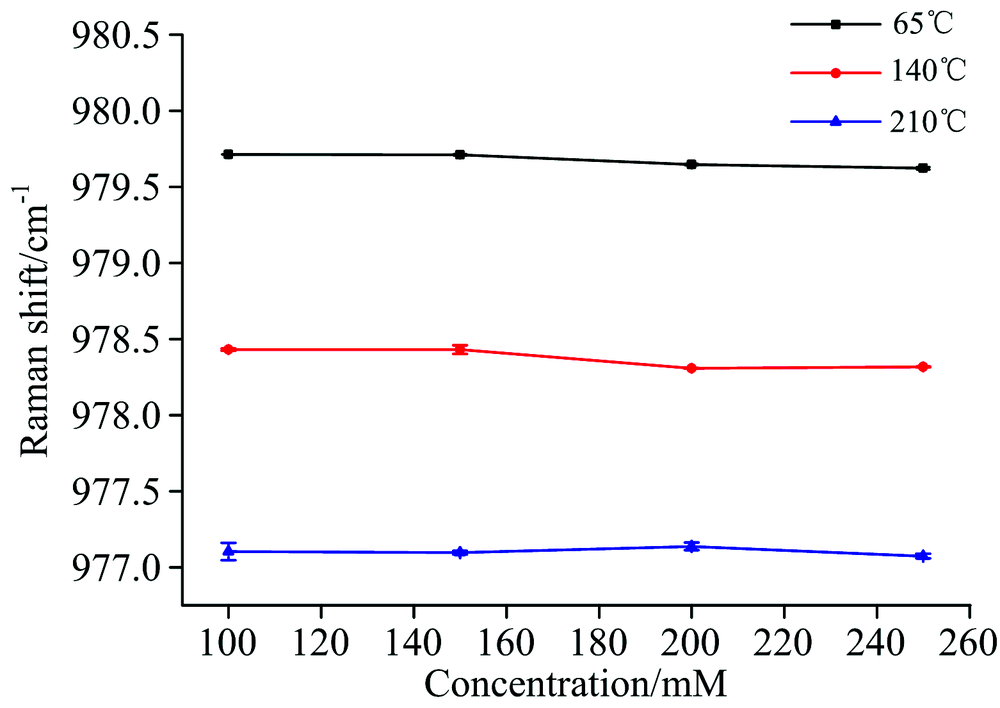 | 图5 不同温度下硫酸根浓度与ν 1(S |
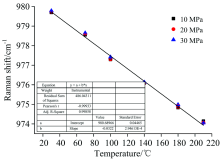
海底热液喷口在不同的深度都有分布, 从20 m的龟山岛热液区到5 861 m的Shinkai Seep深海热液区都有报道, 不同深度的热液流体的压强也不同。 本实验通过模拟已知不同热液区域的压强, 分别获取了同一温度下10, 20, 30和40 MPa的硫酸盐溶液的拉曼光谱, 结果表明ν 1(S
式(1)中,
 | 图6 不同压力下温度与ν 1(S |
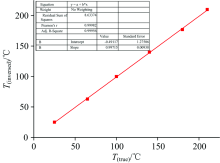
通过比较溶液在40 MPa所测的温度与基于方程(1)所反演的温度进行验证分析, 并进行线性拟合, 拟合方程为(图7)
方程式(2)的斜率为1.00, 线性相关性为0.999 6, 表明基于方程(1)反演的温度与实测温度的相似性很高。
 | 图7 40 MPa下, 硫酸盐溶液T(true)与T(inversed)的校准关系Fig.7 The calibration relationship between the T(true) and T(inversed) of the sulfate solution at 40 MPa |
实验在深海环境模拟舱里模拟了海底热液流体环境。 所配置的硫酸盐溶液也覆盖了热液流体硫酸盐的最高浓度(∑ S
对深海热液喷口流体的温度和压力环境进行了模拟。 基于激光拉曼技术对不同浓度的硫酸盐溶液在0~300 ℃和0~40 MPa等条件下进行了拉曼光谱的研究。 因水峰
该方程可用于深海热液喷口流体温度的原位探测。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|