

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
机器学习法的干旱区典型农作物分类
[黄双燕1, 2  , 杨辽
, 杨辽1 , 陈曦1, * , 姚远1, 2 ]
, 杨辽, 姚远|
|


作者简介: 黄双燕, 1992年生, 中国科学院新疆生态与地理研究所硕士研究生 e-mail: huangshuangyan15@mails.ucas.ac.cn
当前, 基于机器学习方法开展农作物分类研究, 对于确保干旱区粮食安全和生态安全有着极为重要的现实意义。 基于机器学习方法, 采用时间序列Sentinel 2A遥感数据提取农作物分类信息, 通过引入地块基元和红边特征, 探讨了不同分类特征组合对机器学习分类精度的影响。 结果表明: 随机森林分类器可以有效集成光谱和植被指数等多维向量的优势, 将其应用于干旱区典型农作物分类上的精度均在89%以上, 分类组总体精度最高可达94.02%。 地块基元点集支持下的分类特征提取方法能够提高机器学习效率和农作物分类精度, 使光谱组及指数组的分类精度分别提高3.13%和4.07%, 并能有效解决“椒盐”效应及耕地边缘廓线模糊等问题。 红边光谱和红边指数的引入分别使随机森林分类器总体精度提高2.39 %和1.63%, 并使春、 冬小麦的识别能力显著提高, 表明红边特征能够帮助分类器更敏感地捕捉不同作物特有的生长特性及物候差异。 该研究结果可为机器学习方法及Sentinel 2A卫星在干旱区农业遥感的应用提供参考。
Accurate and timely crops classification information is of great significance for arid food security monitoring and ecological management. Adding sensitive waveband and improving classification methods are the major development trends of crops classification. In this paper, we carry out crop classification study based on Sentinel 2A time-series remote sensing data, and establish an object-oriented parcel point set in study area, trying to explore the influence of using different classification features on machine learning classification accuracy. Results indicate as follows: (1)Random forest classifier can effectively integrate the benefits of multidimensional vectors such as spectral or vegetation index, all the accuracy of different groups in this study are above 89%, while the supreme overall accuracy up to 94.02%. (2) The classification features extraction method, which was supported by object-oriented parcel point set, can resolve the issue of salt-and-pepper noise and fuzzy parcel boundary well. Meanwhile, it also improves the efficiency and accuracy of machine learning classifier, which can be demonstrated by the result that the classification accuracy of spectral group and index group increased by 3.13% and 4.07% respectively. (3)Red-edge features can help the classifier to capture the phenological differences and unique growth characteristics of different crops. And the introduction of the red-edge spectrum and red-edge index can improve the classification accuracy by 2.39% and 1.63% respectively, while the recognition ability of spring and winter wheat also improved significantly. The result of this study can be referred for the application of the machine learning method and the Sentinel 2A remote sensing data in arid agriculture remote sensing.
粮食安全问题是关系到国计民生的重大问题, 对于维系国家社会稳定和经济发展, 牢筑生态屏障, 维护国家安全起着核心作用[1]。 农作物类型及其空间分布信息是预测区域作物产量、 优化种植结构的基本依据, 更是制定农业政策、 确保粮食安全的科学支撑。 一方面, 新疆干旱区作为绿洲性粮仓, 为国家提供大量棉花和粮食。 另一方面, 其粮食生产面临着干旱缺水、 低温高寒、 荒漠化、 沙尘暴等的威胁, 生态环境脆弱[2]。 因而, 及时准确地获取干旱区农作物分类信息, 可为新疆农业可持续发展提供有力的科学保障, 对于维护国家粮食安全与生态安全具有重要意义。
传统的农作物类型获取方式以抽样调查和统计上报为主[3], 因投入大量人力物力而存在成本费用高、 主观性强、 现势性差等问题。 而卫星遥感技术具有覆盖范围广、 探测频率短、 成本费用低等优势, 可有效克服传统方法的缺陷, 为大区域尺度农作物种植结构的快速获取与详情掌握提供了强有力的科学手段。
农业遥感信息具有大数据的海量性和多元性特征[4]。 而传统的遥感分类方法多针对单一或小量任务而设计, 对海量数据的信息挖掘技术和处理速度有限, 难以满足农业遥感信息在时序性、 专题性以及智能化应用等方面的需求[5]。 机器学习分类方法因具有启发式学习策略与训练机制, 能有效提高处理时效和分类精度, 已成为当前大区域农作物类型提取的先进方法和前沿领域。 其中, 随机森林方法是机器学习领域的研究热点, 具有分类精度高、 泛化能力强、 数据挖掘能力优异等优点, 对处理分类类别庞杂且类别间异质性小的高维数据, 以及样本数据分布不平衡等方面表现优良, 被广泛应用于遥感分类研究[6, 7]。 然而, 目前对随机森林分类的研究多集中于土地覆盖利用类型提取[8], 针对农作物的分类研究, 特别是基于多时相、 多特征的农作物分类研究报道较少, 对干旱区的农作物分类研究更是尚未见报道。
研究采用以面向对象思想为基础的机器学习分类方法, 针对当前随机森林分类研究多为基于像元的分类[9]、 类内像元光谱差异导致的“ 椒盐噪声” , 以及类间像元邻近效应带来的“ 混合像元” 现象严重、 农作物类型提取精度难以满足应用需求等问题, 以新疆沙湾县为研究区, 选取农作物识别关键期内的时间序列Sentinel 2A卫星数据, 利用随机森林分类器, 充分挖掘研究区典型农作物的光谱特征、 植被指数特征及物候特征, 探索地块基元支持下的多特征农作物分类方法, 以期为实现干旱区农作物类型详情掌握及农业可持续发展奠定基础。
基于Sentinel 2A数据构建包含不同特征的分类组, 利用实地调查数据分组实现农作物分类及精度评价, 探寻红边波段及面向对象的地块基元的引入对随机森林分类器分类精度的影响。 技术路线如图1所示。
 | 图1 技术路线图Fig.1 Technology roadmap |
沙湾县介于84° 57'E— 86° 09'E, 43° 29'N° — 45° 20'N之间, 地势南高北低, 南部为天山支脉, 北部为古尔班通特沙漠。 耕地分布从南至北依次为山前丘陵区、 洪积冲积扇区、 冲积平原区。 该区气候干燥, 昼夜温差大, 属中温带大陆性干旱气候, 年均气温6~7 ℃, 年降水量140~350 mm, 年蒸发量1 500~2 000 mm, 年日照时数2 800 h, 全年大于10 ℃积温达3 500 ℃, 无霜期约180 d。 境内光热资源丰富, 适合棉花、 粮油、 蔬菜、 瓜果等作物的生长, 是新疆25个产粮大县之一。
1.2.1 遥感数据
Sentinel 2A数据因其具有较高的时空分辨率, 且在红边范围内设有3个红边波段, 能够敏感响应作物波谱特征, 目前已成为开展农作物分类研究的主要数据源之一(表1)。 根据研究区主要农作物的物候生长情况, 选用2016年3月— 11月间的118景Sentinel 2A影像, 用于提取农作物分类特征。 所用数据均为已经过几何校正(精度优于1个像素)与辐射校正(绝对误差< 5%)的大气上层表观反射率产品[10]。 因此, 只需对影像进行大气校正预处理, 以去除薄云和雾霾的影响。 同时, 为减小波段间空间分辨率不一致引起的分类误差, 本研究采用最邻近插值法将20 m空间分辨率的红边波段重采样至10 m。
| 表1 哨兵2A卫星波段参数 Table 1 Spectral bands for the Sentinel 2A |
1.2.2 野外调查数据
野外调查数据采集时间为2016年7月— 8月, 根据农作物的类型和种植结构, 共划分为15个采样区。 利用GPS采集每个样区内农作物类型及位置信息, 共获取358个典型农作物地块。 其中, 261个地块作为训练样本参与后期分类, 包括118块棉花地、 30块冬小麦地、 14块春小麦地、 34块番茄地、 48块玉米地、 17块其他农作物。 125个地块作为验证样本用于分类后精度检验, 包括51块棉花地、 29块冬小麦地、 14块春小麦地、 10块番茄地、 10块玉米地、 11块其他农作物。
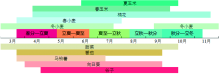
野外调查结果显示, 研究区主要农作物物候生长周期(图2)主要表现为棉花生长周期较长, 春小麦生长周期较短, 冬小麦播种后经历越冬期次年收割。 番茄、 玉米、 向日葵、 谷子、 甜菜生长周期较为相似, 均为4月左右播种, 9月左右收割。 新疆历年统计年鉴显示上述五种作物的种植比重较小。 因而, 结合野外调查数据的作物类型, 确定本次分类研究的主要农作物类型为棉花、 冬小麦、 春小麦和其他农作物。
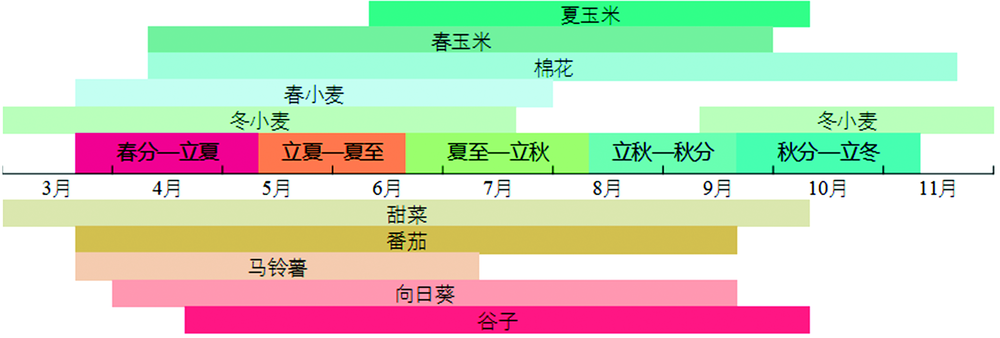 | 图2 研究区主要农作物生长周期及节气信息Fig.2 Growth period and solar terms information of major crops in study area |
1.3.1 植被指数提取
植被指数种类繁多, 是作物生长状态的定量指示因子。
大量研究表明, 归一化植被指数(normalize difference vegetation index, NDVI)能有效消除大气与传感器等的影响, 精确反映植被物候信息, 是当前利用遥感技术进行农作物分类的最常用指标[11]。 改进型叶绿素吸收反射指数(modified chlorophyll absorption ratio index, MCARI)能灵敏地反映不同作物叶绿素含量及生长状态, 利用其时相特性可实现作物分类[12]。 因而, 本研究选用NDVI, MCARI进行分类研究, 对预处理后的118景遥感影像提取上述植被指数。 从Sentinel 2A三个红边波段中选取反射率与作物叶绿素含量相关性更强[13]的b5波段来计算MCARI, 其与NDVI的计算公式如式(1)和式(2)
式中, ρ NIR为近红外段的反射率, ρ R为红波段的反射率, ρ G为绿波段的反射率, ρ RedEdge为红边的反射率。
1.3.2 面向对象的地块基元点集构建
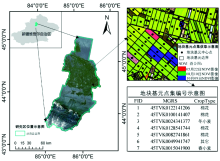
研究引入面向对象的思想, 提出以地块中心点为基本分类单元的方法, 选取农作物地块中心点处纯净像元, 构建面向对象的地块基元点集, 用于从时间序列遥感影像中提取农作物分类特征, 逐地块实现农作物分类。 面向对象的分类方法将光谱性和形状性同质的地块图斑作为分类基本单元, 可有效降低地块内特征高度一致的像元造成的信息冗余, 同时有效解决基于像元的传统分类中存在的耕地边缘阔线模糊、 “ 椒盐” 现象严重等问题。 点集构建步骤如下: (1)选取3景(5月、 8月、 10月各一景)成像质量较好的无云Sentinel 2A植被指数影像, 用红、 绿、 蓝通道分别对应5月、 8月、 10月的NDVI数据, 融合成新的影像, 用于人工勾画地物边界。 (2)提取每块耕地的中心点, 仿照美国军事格网参考系统MGRS的编码方式, 对沙湾县38926块耕地进行编码, 获得面向对象的地块基元点集(图3)。
 | 图3 研究区位置及地块基元点集示意图Fig.3 Paecels data set with MGRS codes in study area |
1.3.3 时间序列分类特征组设立及特征提取
分类特征在机器学习分类器中起着决定性作用, 只有选择合适的特征参量, 才能使分类器有效捕捉到每种农作物有别于其他农作物的特征, 实现农作物分类。 根据不同分类特征, 分别从光谱层面和植被指数层面设立基于地块基元的分类组及基于像素的分类组(表2), 以探寻随机森林分类器及Sentinel 2A数据在干旱区分类过程中的最佳利用方式。 首先, 受云阴影的影响, 每个地块基元对应的无云遥感数据在数量及获取时间上有很大的差异。 因此, 充分考虑农事历及其与研究区内农作物物候信息间的关系, 利用二十四节气将全年划分为能够反映作物生育关键期变化的5个时段(图2), 即春分— 立夏、 立夏— 夏至、 夏至— 立秋、 立秋— 秋分、 秋分— 立冬。 其次, 利用Sentinel 2A数据自带的云覆盖质量判断文件, 在5个时期内各筛选1景天气状况最佳的无云数据, 将每个时期筛选出的无云数据分别镶嵌成一幅影像, 形成时间序列遥感影像集。 最后, 利用面向对象的地块基元点集, 提取时间序列遥感影像集每个时段内各分类组的相应分类特征, 形成支持后续分类研究的多维特征空间。
| 表2 基于不同分类特征的分类组 Table 2 Groups based on different classification features |
随机森林是一个结合了bagging集成学习理论与随机子空间理论的新型机器学习分类器, 其实质是利用多个决策分类器投票确定最终分类结果。 其基本流程如下: (1)通过bootstrap自助重抽样技术[14], 从实地调查数据中的农作物训练样本所构成的原始训练集中随机抽取n个子样本, 每个子样本大小约占原始训练集的70%, 包含的分类特征总数为M(M的个数为相应分类组在5个时间序列内所有分类特征个数的总和)。 (2)利用每个子样本集构建决策树, 生成包含n棵决策树的随机森林分类器, 从子样本的全体分类特征集M中选出m个最优分类特征(m≤ M)用于该棵决策树分类。 (3)利用建立好的随机森林分类器依次对上述八个时间序列分类特征组进行分类, 每个地块基元中心点或像素的农作物类型由n棵决策树的分类结果投票确定。 原始训练集中未抽中的数据构成袋外数据, 用于计算随机森林分类器的泛化误差。 要获得较好的集成分类性能, 需要利用泛化误差优化随机森林分类模型的决策树的数量(n)和决策树内部节点随机选择分类属性的个数(m)两个变量。 根据反复试验和研究, 确定n=1 000, 且m=
分类前计算用于分类的训练样本的可分离度, 可分离度的值在0~2之间, 大于1.9说明样本之间的可分离度优异, 小于1.8则需要重选样本。 本研究各分类组的样本可分类度均大于1.8, 表明样本选择较为合理。
为分析时间序列光谱特征及植被指数特征对典型农作物的可分性, 选取研究区内种植面积较大的棉花、 春小麦、 冬小麦以及其他农作物类型里的代表作物春玉米和番茄。 对每类作物选取100个样本点, 提取其在时间序列无云遥感影像上的蓝(b2)、 绿(b3)、 红(b4)、 近红外(b8)、 红边(b5, b6, b7)波段反射率值及NDVI, MCARI像元值, 剔除异常值后求取均值并绘制五种作物不同分类特征的时间序列均值曲线(图4)。 红、 绿波段与蓝波段的曲线趋势相似, 因而不在图中展示。
 | 图4 主要农作物不同分类特征时序曲线变化图Fig.4 Time series curves of the major crops for different classification features |
从图4可以看出, 不同农作物因物候差异在各分类特征中呈现不同的曲线波动趋势: (1)2016年4月中旬, 春小麦处于播种初期, 棉花、 番茄、 春玉米处于备耕期, 四种作物地块特征差异不明显, 在除b2波段以外的其他分类特征中都难以区分。 相比之下, 2015年10月左右播种的冬小麦在经历越冬期后处于拔节期, 其NDVI和MCARI值较高, 各波段反射率也均处于最高或最低水平, 明显有别于其他四种农作物; (2)2016年5月中下旬, 冬小麦处于抽穗期, NDVI及MCARI率先达到峰值, 春小麦迅速生长, 在NDVI, MCARI, b2及b6波段曲线中有较强的响应; (3)2016年6月上旬, 棉花、 番茄进入开花阶段, 春玉米进入拔节阶段, 叶面积和作物覆盖度逐渐增大, 叶绿素吸收能力逐步增强, 三种作物生长迅速, NDVI和MCARI增幅较大; (4)2016年7月中下旬之后, 棉花逐渐从花盛期步入裂铃期, 营养器官发育完全, 在分类特征上体现为b2和b6波段反射率陡然下降, b5, b7和b8波段反射率陡然升高, 利用该特点可将棉花和与之生长规律相似的番茄、 春玉米区别开来; (5)2016年8 月中下旬开始, 棉花、 番茄、 春玉米的营养器官成熟后趋于衰老, 叶绿素含量逐步减小, NDVI和MCARI在达到顶峰后逐步减小, b2和b6波段反射率逐步增大, b5, b7和b8波段反射率逐步减小。 春玉米与番茄仅在MCARI曲线中有较明显的差异, 在其他分类特征上则始终难以区分。 综上, 时间序列的分类特征曲线符合各作物生长规律。 棉花、 春小麦、 冬小麦的植被指数与光谱特征差异显著。 利用时间序列遥感影像能够有效表征主要农作物的季相规律和物候变化规律, 可用于农作物分类。
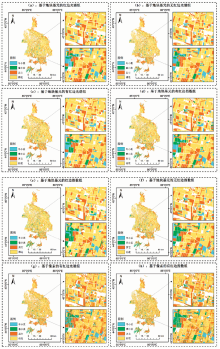
根据8个分类组获取的分类结果, 绘制了研究区内主要农作物的空间分布图(图5), 并利用野外调查数据集中的验证样本, 分别计算各分类组的总体精度、 Kappa系数和4种作物类型的用户精度和生产者精度, 以实现对各分类组分类精度的定量评价(表3)。
 | 图5 基于不同时间序列分类特征获取的典型农作物分类图Fig.5 Classification map based on different Sentinel 2A time series data |
| 表3 分类精度对比 Table 3 Classification accuracy statistics |
总体来看, 8组分类结果都取得了较高的分类精度, 总体精度均在89%以上, 且8组分类结果所反映的种植结构是一致的。 棉花在沙湾县农作物种植结构中占主体地位, 集中分布在资源丰富且灌溉设施较为完备的冲积平原区及洪积冲积扇区, 地块连续且面积大。 春小麦、 冬小麦在全县均有分布, 但主要集中在山前丘陵区且地块较为零星。
不同分类组之间的分类情况存在着微小的差异, 因而从以下三个方面进行讨论:
(1)地块基元对机器学习分类精度的影响。 遥感器在成像过程中, 像元所记录的复合信号多来自于周围像元对应的光谱信号, 因而基于像元的方法难以消除背景因素(田埂、 草地)等的邻近效应, 在边界上容易产生错分现象, 影响分类精度。 该现象在地块狭长的春、 冬小麦地块出现最多[图5(d)和(h)]。 通过引入面向对象的地块基元点, 能有效减少地块内部同质对象的信息冗余, 提升机器学习分类效率, 并能使分类精度得到明显提升。 其定性描述如图5所示, 基于像素的分类结果中“ 椒盐噪声” 较多, 地块边界廓线模糊[图5(g)— (h)], 而基于地块基元的六组分类结果中地块规整平滑, 边界清晰[图5(a)— (f)]。 定量描述如表3所示, 基于地块基元的有红边光谱组及有红边指数组与基于像素的对照组相比, 分类精度分别提高3.13%和4.07%。
(2)分类特征对机器学习分类精度的影响。 对比基于地块基元的6个分类组(表3)发现: 同样利用随机森林分类模型, 有红边光谱组的分类精度最高, 为94.02%。 其次是有红边指数组, 分类精度为93.33%。 而红边指数组的分类精度最低, 为89.44%。 从图5也可看出, 只用红边指数MCARI进行分类, 容易将春小麦误分为棉花、 冬小麦和其他作物[图5(e)]。 此外, 棉花、 春小麦、 冬小麦、 其他作物的最佳分类特征识别组依次是有红边光谱组、 有红边指数组、 有红边指数组、 有红边光谱组。 用户精度与制图精度的平均值依次约为94.34%, 98.46%, 96.63%和91.78%。 上述研究结果表明, 分类特征的选取对机器学习分类结果产生较大影响, 必须慎重选择。 与植被指数特征相比, 随机森林分类器对光谱特征更敏感, 有效分类特征的增加会促使随机森林分类器的总体分类精度及各作物精度获得提升。
(3)引入红边分类特征对机器学习分类精度的影响。 分别对比基于地块基元的光谱组和指数组(表3), 发现红边特征的引入对随机森林分类模型的精度提升较为有效, 可以使光谱组的总体分类精度从90.89%提高至94.02%, 并使指数组的总体分类精度从89.26%提高至93.33%。 但红边波段对不同种类的农作物识别精度提高的贡献程度不一, 在引入红边波段后, 光谱组的春小麦和冬小麦用户精度提升较为明显, 分别增长了4.28%和4.38%, 而棉花的用户精度仅提高0.5%。 指数组中其他作物和冬小麦的用户精度提升明显, 分别增长了6.05%和3.45%, 棉花的用户精度仅提高了0.17%。 这表明红边特征的引入有助于提升随机森林分类器对春小麦、 冬小麦和其他作物的识别能力, 但对棉花识别能力的提升依然有限。
针对干旱区现有农作物分类研究方面的不足, 采用随机森林的机器学习方法, 在分类策略上引入地块基元和红边特征, 探寻了不同分类特征组合对机器学习分类精度的影响, 实现了沙湾县农作物分类信息提取。 主要结论如下: (1)分别利用8个时间序列光谱、 植被指数分类特征集进行农作物分类, 总体精度均在89%以上。 分类组最高精度达94.02%。 表明随机森林机器学习分类器可有效集成多维向量的优势, 是一种行之有效的干旱区典型农作物分类方法; (2)利用地块基元中心点作为同质地块的代表像元, 提取的分类特征可供机器学习分类器使用, 并能较大幅度提高分类精度及效率, 平滑地块内部同种作物间的“ 椒盐噪声” 。 引入地块基元后, 有红边光谱组及有红边指数组的分类精度分别提高3.13%和4.07%; (3)分类特征的选取及组合会对机器学习分类精度产生较大影响。 与植被指数特征相比, 随机森林分类器对光谱特征更敏感。 随着有效分类特征的增加, 随机森林分类器的分类精度将获得逐步提升; (4)红边特征的引入使光谱组及指数组的分类精度分别提高2.39%和1.63%, 对随机森林分类模型的精度提升十分有效。 因此, 具有3个红边波段的Sentinel 2A卫星在干旱区农作物分类应用上具有较大的应用潜力; (5)红边波段对不同种类的农作物识别精度提高的贡献程度存在一定差异。 特别是在引入红边后, 随机森林分类器对春、 冬小麦的识别能力显著提高, 而对棉花却几乎没有提升。
地块基元支持下的多特征机器学习农作物分类方法可为干旱区农作物种植结构详情掌握和优化调整提供有效手段, 并为维护干旱区农业可持续发展及生态安全提供保障。 本研究的不足之处在于以下两点: 一是波段冗余可能会限制机器学习分类器的灵敏度。 二是不同红边指数可能产生不同的分类精度。 因此, 如何降低波段冗余并获取最优分类特征将作为未来研究的重点。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|