


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于红外热成像的林地余火死灰复燃点诊断方法研究
[何诚1, 2 , 刘柯珍2 , 舒立福2 , 洪霞芳3 , 张思玉1, *  ]
]
]
|
|


林地余火阴燃特性具有隐蔽性强、 持续时间长、 目测难度大、 且具有死灰复燃等特点, 从而一直困扰森林火灾的彻底扑灭。 为了及时、 高效地发现林地余火阴燃点, 探索林地余火死灰复燃的特征及规律, 在南京森林警察学院点烧基地里进行测试实验, 以无人机搭载热红外成像系统、 气象采集系统等为工具, 把火源点设置在杨树林内, 人为干预进行点烧、 熄灭、 复燃等重复实验, 实验包括白天和夜晚两个时间段, 用安装于无人机上的红外热成像仪对火源进行观测。 实验表明: 林地余火死灰复燃的温度在500~600℃, 离散程度较大; 林地余火死灰复燃在白天的时间普遍短于夜晚时间, 表明外界温度越高, 越会促进林地余火死灰复燃的速率; 在森林中, 不同地点、 不同时间段的森林背景温度标准差比较稳定, 主要处于1~9 之间; 林地余火红外图像的温度数据的标准差值分布在30~85之间; 红外图像的温度数据的标准差值分布在55~85 之间, 则可定为死灰复燃可疑阶段。 该方法量化了死灰复燃的火环境及温度参数阈值, 明确林地余火阴燃点引燃特征值。 该研究成果将推动森林防火技术的发展, 为安全扑火提供重要的方法和资料。
Chinese Academy of Forestry, Beijing 100091, China; 3. School of Tourism, Jiangxi Science & Technology Normal University of China, Nanchang 330013, China
Abstract The embers in the forests are hard to be extinguished because of their smoldering combustion, such as concealing, long burning, invisible inspection and easy resurgence. To find the smoldering combustions timely and efficiently and to explore the characteristics and rules for the resurgences, a series of experiments have been presented in this study. With the help of a drone equipped with thermal infrared imaging system and meteorological data collection system, some experiments were conducted in the poplars in Nanjing Forest Police College, where ignitions were set, lighted, put out and resurged by human intervention. The embers were observed by the Infrared Radiometer on the drone in the daytime and at night. The results showed that the dispersion was bigger when the temperature of smoldering combustion was between 500~600 ℃, and the easier resurgence in the daytime than at night suggested that the higher external temperature the ember was, the easier resurgent it was. It was pointed that the temperature in forests was relatively stable in different plots and in different time, with a standard deviation of 1 and 9. The standard deviation of temperature data on the infrared images of embers varied from 30 to 85 and it revealed that the values between 80 and 85 would be suspected. In this method, the surroundings and parameter threshold of temperature in the smoldering combustions could be quantified to determine their eigen values of embers in the forests. It is reasonable for the researchers at this point to promote the development of the technology in the forest-fire prevention and the decision-makers to ask which results could provide some important methods and data for safe fire-fighting.
Keywords Embers; Diagnosis; Drone; Resurgence
According to Chinese official statistics on the Daxinanling forest region, in the 1970 s, 58% of 32 wildfires were caused by a single ember resurgence fire, and there had been 7 of 10 large forest fires in the embers in the first 3 years of the 1980s. They partly resulted from the un-cleared embers that resurged and caused bigger fires and bigger and losses[1]. According to the official statistics from the Headquarters of China Forest Fire Prevention, 80% forest fires were created by fire resurgence.
It is an extremely complex phenomenon for the unextinguished embers in forest fires, caused by smoldering combustions which are difficult to find because there is no smoke and open flame on the surface with all the far-reaching resurging easily followed. The fires involve many factors, some of which are different combustibles, and others are distribution, landform and meteorology and so on. Not so apparent is the fact that it is very difficult to get any timely data to further monitor and fire suppression because the factors could result in fires too random and complex to observe and control.
Today, there are many modern technological means for fire monitoring, such as satellite remote sensing, outlook towers, ground patrol and aircraft, etc.[2, 3]. It is easy to collect data about the country by using satellite monitoring forest fires once. However, they are hard to be well resolved timely because their orbital periods and unsettled weather is compounded. We can observe the fire at any time on the lookout tower but on a limited scale. Furthermore, the cost will be greatly increased with more equipment and there will inevitably arise some visual blind spots affected by the complex geography. Patrols on the ground can spend more time and work, but in which case their work can be inefficient and peripheral vision might be limited when people walk amongst the trees. By contrast, patrol aircraft in the air have a number of obvious advantages, for instance instantaneity and adaptability. However, it is not easy to carry at large scale because of high cost to carry. The aircrafts are occasionally rented for some important work in many forests.
With the technology advancing, Unmanned Aerial Vehicle (UAV) is widely applied in many fields as a new kind of aircraft in recent years, such as, meteorological sounding, disaster monitoring, environmental remote sensing 7[3, 4, 5]. It is parhcularly suitable for monitoring forest fires because it is light and small, a little cheaper to purchase and be operated, easier and more flexible to operate so that it can be adjusted according to the conditions for the plan and loading device. It is difficult to find the embers with a conventional camera on the UAVs because the temperature around the region after fire is higher than that of no-fire zone where the embers are hard to be observed and located. The UAV telemetry is known as the drones quipped with sensors to detect them far away the ground object and no-contact, and then can get the target analyzed, judged and applied[4]. Unfortunately, the destructive system on UAVs with infrared detector are not well used for embers recognition, because the operator is rcquired to have good knowledge of the geographical environment and readings[6, 7].
In the United States, the research on infrared detectors for forest fire was carried in the 1970 s, and then a variety of craft with infrared detectors were developed to monitor the forest fire. Among the systems, the most notable was a new digital airborne infrared system (Phoenix), which was developed by National Aeronautics and Space Administration (NASA) and was widely applied in forest fire prevention by US Forest Service in 2007, more than 2000 times[8]. In China, the infrared technology launched in the 1970 s, with all the far-reaching research that followed, the embers detector TCY-1 and infrared embers forest fire inspector FID-1 were all developed by Forestry Administration of Heilongjiang Province in the 1990s. The infrared detector has the advantage of flexibility, so that the ember and flames can be easily detected because it is little affected by the weather and time, open flames and can detect embers[3]. Unfortunately, there is an unavoidable disadvantage for the infrared detectors because the infrared rays are so easily absorbed to decrease by the attenuation in the air that their transmittance will abate, leading to low contrast and poor resolution.
In China, there is little study on the identification technology of fire position by unmanned aerial vehicle (UAV). It will be useful rarely if ever the camera system on unmanned aerial vehicle (UAV) to carry on patrol in the forest fire prevention cannot timely get it discerned and located[9]. According to literature[10], if the data obtained by the Topographic technique with the help of the unmanned aerial vehicle (UAV) , in which the feature’ s coordinates could be acquired by the images processed after splicing, were applied to forest fire prevention, however, it will not be enough to timely to make better plans for fire fighting and rescue command, and even cause bigger delays[11, 12].
Therefore, it will be vital for the forest fire prevention to get a rapid and accurate identification and position of a wide range of forest fire embers, and then cleared. In this study, a new procedure for getting the invisible embers with less smoking and low temperature identified and poisoned more accurately by the UAVs with infrared detector is proposed, in which the smoldering combustion could be diagnosed and located, by measuring the temperature of embers with the infrared images, even in the forest where access is difficult for people or the temperature is too high to approach with any equipment. The model derived by this technology proves to be simple and practical significance, thus creating good conditions for making indirect fire monitoring and prevention, with less time, cost and increased safety.
No specific permits were required for the described field studies, since the trees chosen in the study are owned and managed by the state, including the sites for our sampling which are not privately-owned or protected in any way and specific permission for non-profit research, therefore, is not required. The field studies were not involved any endangered or protected species in this area.
The study site was located in the burning base in Nanjing Forest Police College of China, Qixia District, Nanjing City (29° 57'N to 31° 19'N, 117° 58'E to 119° 40'E), and was chosen because the site conditions are typical of those in the rest of the region affected by the problem of hilly terrain. This region has a high mean precipitation (1 200 mm· yr-1) and warm annual temperatures (a mean of 16 ℃). The study region is primarily covered by red Pterocarya stenoptera, in which the average stand height is 10 m and canopy density of 0.8. Meanwhile, several factors will have an effect on the burning of the embers, of which climate, weather and fuel type are the most important considerations, so that many kinds of litters is gathered manually in the plot. The experiment is located in a region of 5 m× 5 m and a median of about 2 m in case of leak-out. The land is covered with the litters of 15 cm thick and there is something combustible 50 cm thick in the center of 1 m2.
The UAV is a gyrodyne of 6 rotors consisting of a hexagon of 1 110 mm× 1 060 mm× 650 mm, weighs 10 kg and has a maximum loading of 5 kg. The time-of-flight is 30~40 min and its airspeed is 0~20 m· s-1. The UAV is equipped with GPS receiver and head with an infrared imager, by which the temperature at any point in the infrared picture could be searched. The controller in Mission Control is communicated by wireless with the driver on the head, driving center controlling the UAV’ s flight, vidicon, aerodist and GPS receiver(shown in Fig.1). Its remote-controller is Futaba 2.4 GHz 10 and R6014HS receiver.
 | Fig.1 Six rotor unmanned electric helicopter carrying infrared imaging system |
To test infrared detector’ s perception of the embers away from different distance and at different times without rain, and then to detect the steadier algorithm for the evidence that the best way could be obtained by infrared detector in the wild, some experiences were made in Nanjing Forest Police College of China from Dec.15, 2016 to Feb.21, 3017. The fire was fixed, but the observation was moved in this study. The fire was mighted in the poplar forest and many repeated tests were done by lighting, cutting, and relighting. The fires were observed by the infrared detector on the UAV.
The data in the field test are shown as below.
(1) Meteorological data recorded by handheld meteorograph, such as temperature, relative humidity and wind speed.
(2) Images from the infrared detector at the different times once in the daytime and at night.
(3) Pixel digital numbers away from different fire detected by the infrared detector and the temperatures of the fires recorded by Infrared Thermometer. The fire was lighted in the poplar forest and many repeated tests were done by lighting, cutting, and relighting. The fires were observed by the infrared detector on the UAV.
(4) Temperature of each fire and unburned combustible around observed by shifting.
The data were processed as below.
(1) The data would be mainly studied when temperature rose by interference, but the falling data shoule be removed when the fire was put off.
(2) The best threshold F would be set by raising the temperature of fire to reburn. The best threshold F would be set by determining the suitable range for observation that is the difference between the minimum of the fire and around and the maximum of non-fire. The best threshold F would be set by determining the suitable range for observation that is the difference between the minimum of the fire and around and the maximum of the mean in this picture.
(3) The Standard Deviation should be achieved by the image of m× m by the infrared detector. The algorithm of detecting the ember in the infrared thermography.
The thermal imargery acquired by the infrared thermography is a map of m× n, each pixel of which has a corresponding value that is a reading related to the temperature of an observation target. In this system, the image could be regarded as an array of m× n shown as formula 1, where the pixel in a ij[LINE][COL] could be expresseda(i, j).
(1) Discriminant method for threshold
The bigger image pixel value in the area of higher temperature will show brighter. The threshold value of lighting should be set in the infrared thermography at first, so that the fire point could be detected when the pixel value is above the threshold. Given that, the set of the fire expressed as below, F is the threshold value,
(2) Discriminant method of mean compare
The method is based on the above threshold, deriving the average value Ave of all pixels in this picture and then setting a threshold T. The lighting point could be decided when the average of the pixel and around is bigger than Ave+T, that is
The set of the fire expressed as below
An algorithm of Standard Deviation was proposed in this paper. However, the external factors, say, the landform, combustible, weather and so on, could result in a bigger scattering of the threshold. Standard Deviation method is square root of variance.
In the standard deviation, let a set of numbers x1, …, xN be real, its mean be
The test was done in the daytime and at night. In the daytime from 09:00 to 11:00, the average temperature was 8.9 ℃, the average humidity was 38%, and the average wind velocity was 0.8 m· s-1. At night of 20:05— 22:15, the average temperature was 5.3 ℃, the average humidity was 43%, and the average wind velocity was 0.9 m· s-1.
2.1.1 Analysis on the temperature feature background the forest
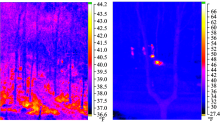
The forest is covered with mostly trees where they can send out large heats while absorbing heats from the sun. To get the feature, many experiences were done in this study, where the distribution law of the temperatures could be calculated after the infrared images were extracted at any time and under different conditions. In this paper, 95 images were chosen, where grasses and trees were all filmed in the morning, at noon and at night in Nanjing Forest Police College of China, shown as Fig.2.
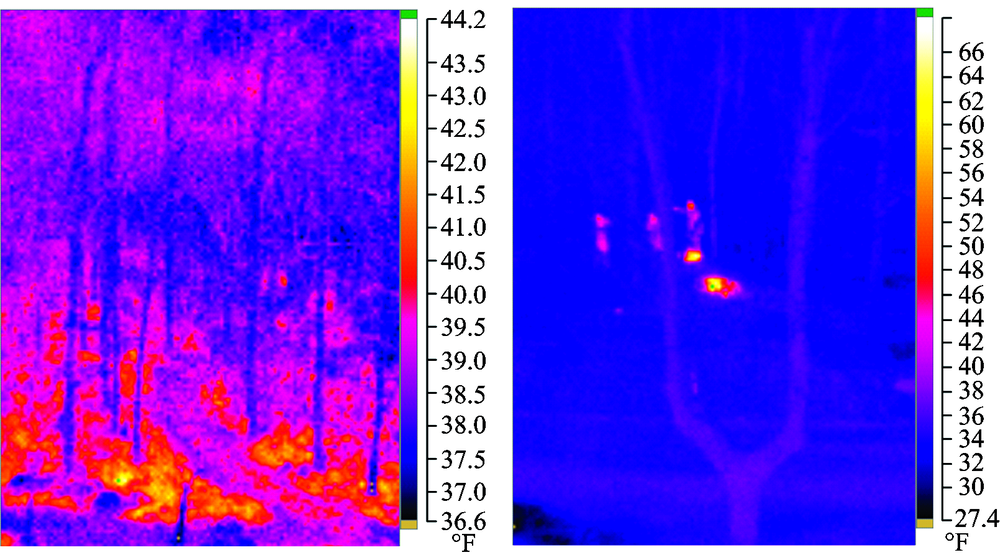 | Fig.2 The infrared images background the forest (a) is in the daytime; (b) is at night |
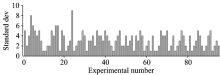
In forest, the standard deviation of temperature background in the forest remains stable in 1~9 in different places and at different times, as shown in Fig.3.
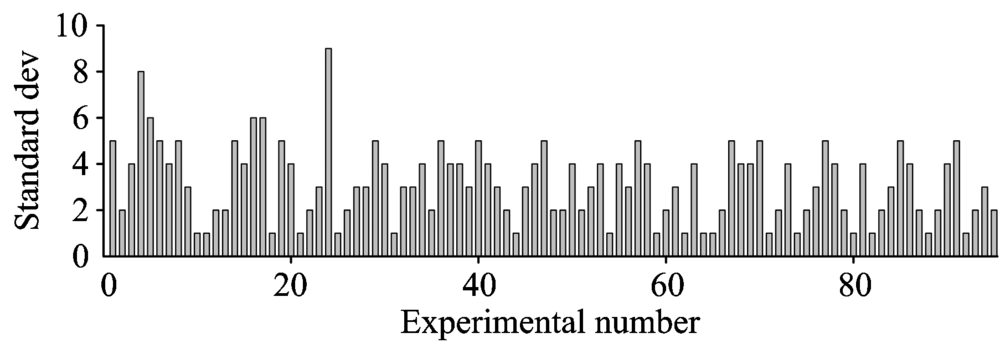 | Fig.3 The standard deviation of temperature background the forest |
2.1.2 Analysis on the temperature feature of the forest ember
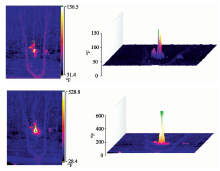
To decide the evidence for identifying the ember, the temperature distribution of the infrared images where there could be rejuvenated combustible more than the temperature background the forest varies with time and landform should be firstly detected. If so, the correct identification could be made on basis of the temperature distribution law of background forest and the embers. The temperature varying with time, the resurgence of the embers could be divided into three: smoldering, all heat up and reburning, where there is no open flame in the first two moments. The distribution characters and laws for changes of temperature in the smoldering combustibles were concluded into this paper by test. The subjects in this study were a mixture of underwoods which were tested in the daytime and at night. Many videos and infrared images were taken, and the standard deviation of temperature at different stage around a fire was put off. But smoldering were then computed, and then flared up artificially, as is shown in Fig.4.
 | Fig.4 The collation infrared images of smoldering embers at night (a): The infrared images of smoldering embers at night; (b): The infrared images of smoldering embers at night |
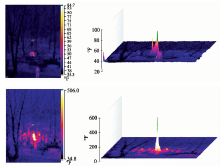
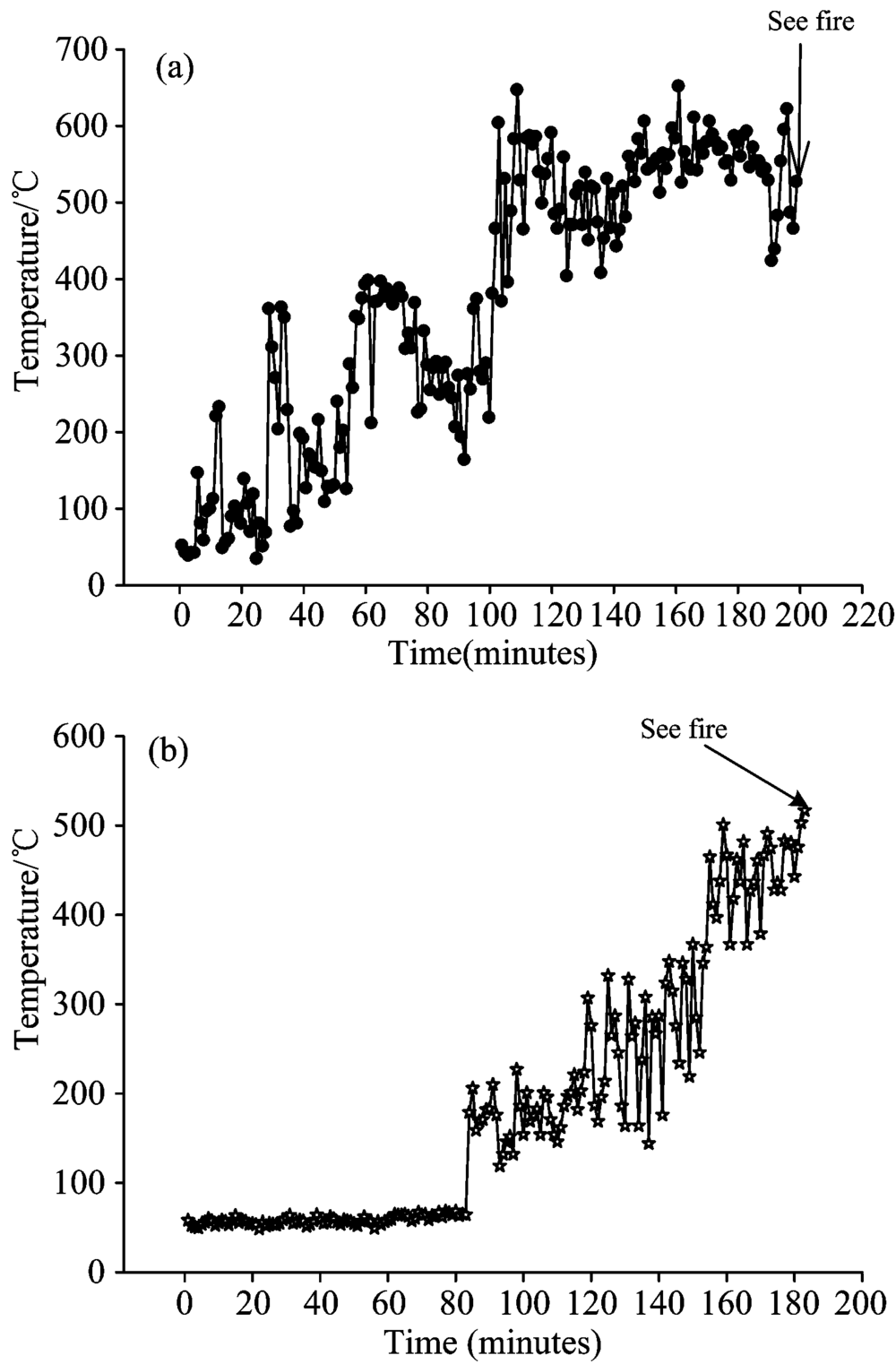
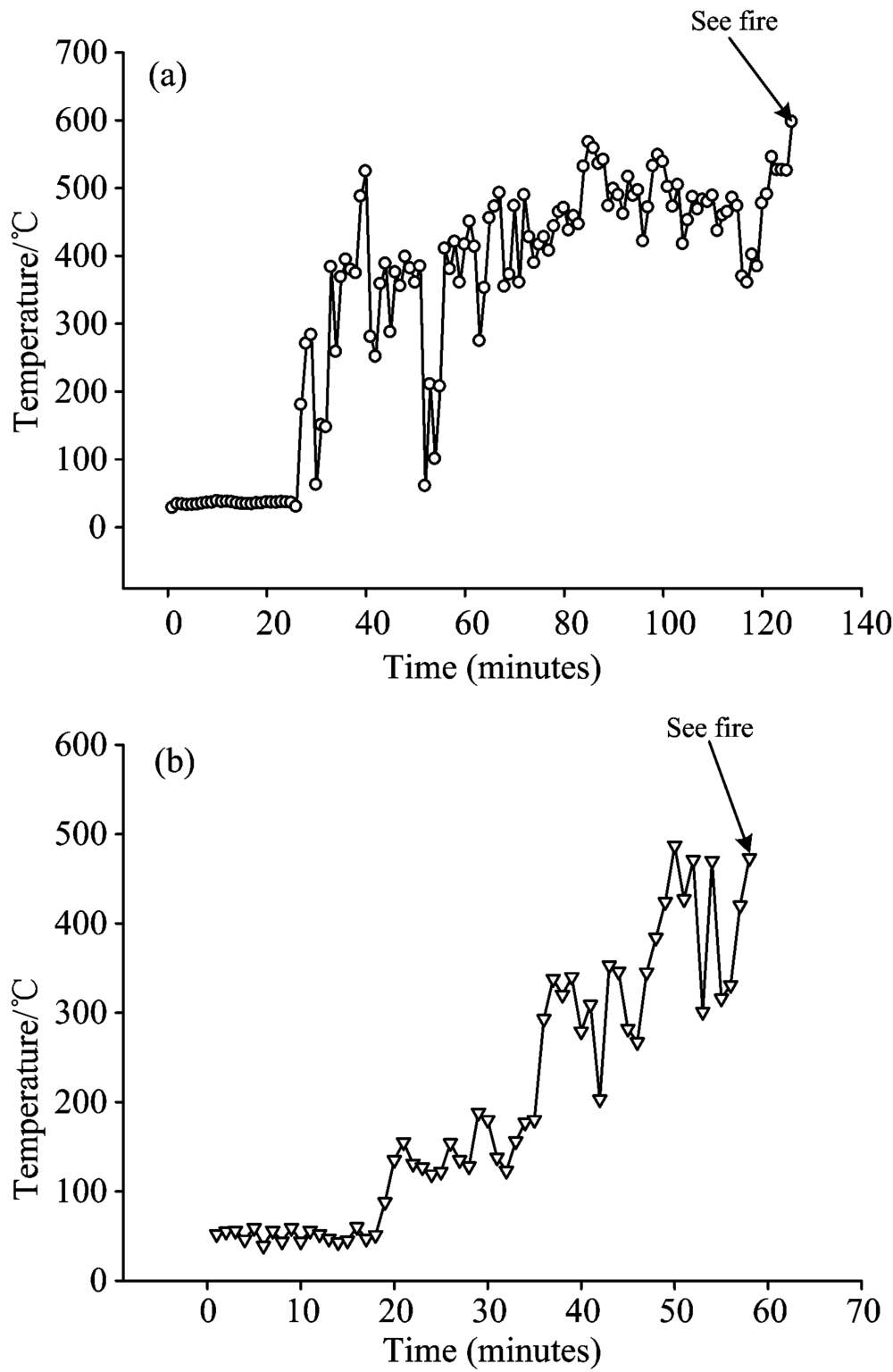
All the changes of temperature in the smoldering combustible in four groups (twice in the daytime and at time) chosen from 150 in the test are illustrated in the following two charts. Fig.6 gives two states in the daytime and Fig.7 reveals two plots at night. During the test, the temperature of the ember was recorded every one minute anduntil in the end when the fire was all wiped out. The data represents that the discreteness is bigger when the temperature of the smoldering combustibles rejoices in 500~600 ℃. The shorter resurgence in the daytime than that at night gives an illustration that the higher temperature around could accelerate the resurgence of the embers. The resurgence is deeply affected by the surroundings because it costs quite different time. The different landforms and combustibles could result in the different temperature of resurgences, The method is more suitable in that the likelihood of a suspect could be judged by Standard Deviation method than by discriminant method for threshold.
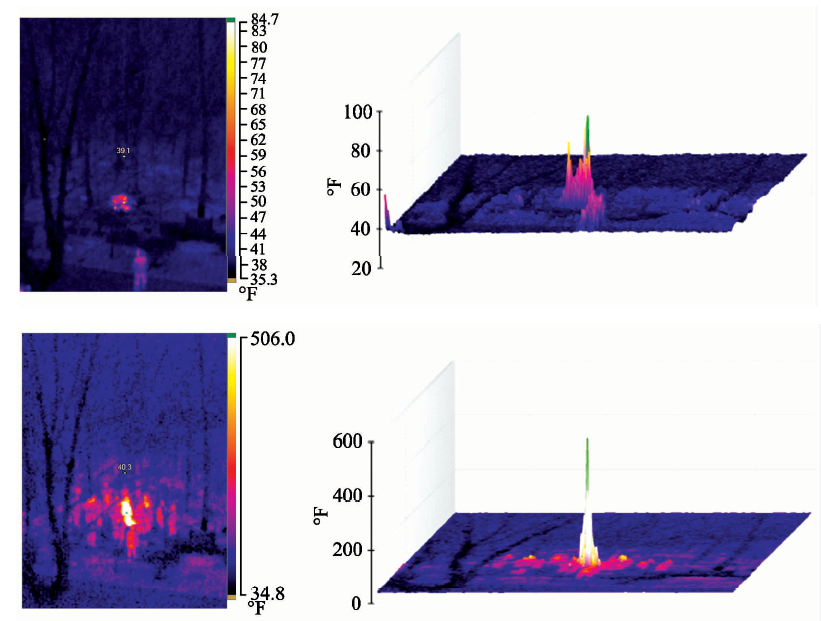 | Fig.5 The collation infrared images of smoldering embers in the daytime (a): The infrared images of smoldering embers in the daytime; (b): The infrared images of smoldering embers in the daytime |
 | Fig.6 All the changes of temperature in the resurgence in the daytime |
 | Fig.7 All the changes of temperature in the resurgence at night |
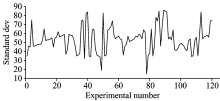
The IR thermal signature of an ember could not be obvious in the infrared imagery, but the heat source could be observed and the central temperature is very high. The distribution law of temperature summarized by 120 groups of IR tests on embers suggests that the standard deviation of the temperature in the whole IR picture falls between 30 and 85 shown in Fig.8, which is different from that of background the forest.
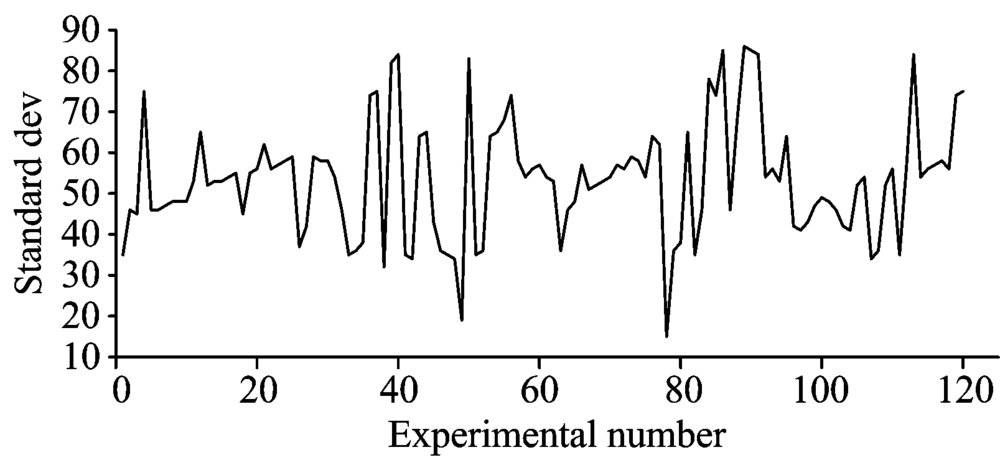 | Fig.8 Standard deviation of temperature in the smoldering |
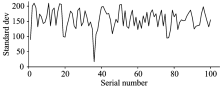
And, 100 groups of data were investigated by infrared imagery in open flame after resurgence. Fig.9 elaborates the deviation of temperature in 80~210 which is a big fluctuation scope in the infrared images.
 | Fig.9 Standard deviation of temperature in the resurgence |
The results obtained above could propose a judgment of the embers: the deviation of temperature between 2 and 9 in the whole IR imagery could demonstrate that there is no likelihood of resurgence, but there is likelihood when the value remains in 30~85. We can be sure of one thing: if the value falls in 80~210, there must be fire source in this picture, at which further analysis with reference to the surroundings should be added. Here is a law shown in Table 1 that may help have an idea of the identification.
| Table 1 The deviation distribution of temperature in the infrared images under different conditions |
In this study, UAVs used in forest-fire prevention, in which on basis of the special feature in an ember, a thorough exposition is accorded to the identification and orientation by the onboard infrared thermography, along with a diagnosis on the resurgent point by the empirical data derived from the space of embers and IR imagery. The probability and time of resurgence are discussed and the Standard Deviation method proves to be simple and of practical significance, thus creating good conditions for theoretical and technical support for fast and accurate ember suppression.
Not so familiar is the fact that the parameter setting in the algorithm of detecting the ember influenced deeply by the surroundings should make it possible to test and adjust based on the local situation. However, the test method in this paper could make it an effective adjustment and regulation.
The test described in this paper focuses on the identification of embers in common forest, and the diagnosis on the suspect of resurgence. And of course, some infrared source, say, sun, high-temperature boiler, sunlight reflected by glasses, make false information that could not be excluded even if they are adjusted by the algorithm, so some research on how to shield them will be recommended to reduce the possibility. The absence of devices in test would not make it more accurate control of the fire temperature. Therefore, it is demanded that their changes by IR imagery remain to be tested and proved.
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|