




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于机器学习的马铃薯叶片叶绿素含量估算
[李成举1, 3  , 刘寅笃
, 刘寅笃1, 3 , 秦天元1, 3 , 王一好1, 3 , 范又方1, 3 , 姚攀锋2, 3 , 孙超1, 3 , 毕真真1, 3, * , 白江平1, 3, * ]
, 刘寅笃, 白江平]
|
|


作者简介: 李成举, 1997年生, 甘肃农业大学农学院硕士研究生 e-mail: 1903829332@qq.com
为了提高马铃薯叶绿素含量估算模型的精度, 使用无人机平台搭载多光谱相机, 获取对照处理和干旱处理下马铃薯关键生育期的遥感影像, 选取13种植被指数作为叶绿素含量反演模型的输入变量, 使用多元线性回归(MLR)、 支持向量回归(SVR)、 随机森林回归(RFR)、 决策树回归(DTR)构建马铃薯叶绿素含量估算模型。 首先分析了植被指数与叶绿素含量之间的相关性, 结果表明, 在对照处理块茎形成期, CIre、 GNDVI、 NDVIre、 NDWI、 GRVI、 LCI与叶绿素含量之间的相关系数绝对值在0.5以上, 且存在显著( p<0.05)或极显著( p<0.01)相关性; 在马铃薯其他生育时期, 13种植被指数与叶绿素含量之间的相关系数绝对值均在0.5以上, 且存在极显著( p<0.001)相关性。 然后对MLR、 SVR、 RFR和DTR等模型的精度进行比较, 结果表明: SVR模型在对照处理块茎形成期、 块茎膨大期和淀粉积累期的预测效果均是最佳, R2和RMSE在块茎形成期为0.89和2.11, 块茎膨大期为0.59和4.03, 淀粉积累期为0.80和3.18; RFR模型在干旱处理块茎形成期、 块茎膨大期和淀粉积累期的预测效果均是最佳, R2和RMSE在块茎形成期为0.90和1.57, 在块茎膨大期为0.87和2.16, 在淀粉积累期为0.63和3.01。 该研究为马铃薯叶绿素含量监测提供一种新的方法, 后期可根据不同试验处理选择相应的估算模型。
, LIU Yin-du, BAI Jiang-ping
To improve the accuracy of the photo chlorophyll content estimation model, the remote sensing images of different growth stages of potatoes under control and drought treatments were obtained using a multi-spectral camera on a UAV platform. Thirteen vegetation indices were selected as input variables of the chlorophyll content inversion model, and the estimation model of potato chlorophyll content was constructed by using multiple linear regression (MLR), support vector regression (SVR), random forest regression (RFR) and decision tree regression (DTR). Correlation analysis between vegetation index and chlorophyll content showed that at the tuber formation stage of the control treatment, the absolute values of correlation coefficients between CIre, GNDVI, NDVIre, NDWI, GRVI, LCI and chlorophyll content were above 0.5, and their were significant ( p<0.05) or highly significant ( p<0.01) correlations. In other growth stages of potato, the absolute values of correlation coefficients between 13 vegetation indexes and chlorophyll content were all above 0.5, which was a highly significant correlation ( p<0.001). In addition, the accuracy of MLR, SVR, RFR and DTR models were compared. The results showed that the SVR model has the best prediction effects in the tuber formation stage, tuber expansion stage and starch accumulation stage of the control treatment. The control treatment's R2 and RMSE were 0.89 and 2.11 in the tuber formation stage, 0.59 and 4.03 in the tuber expansion stage, and 0.80 and 3.18 in the starch accumulation stage. The RFR model produces the best prediction effects in the tuber formation, tuber expansion, and starch accumulation stages of the drought treatment. The outcomes of R2 and RMSE on drought treatment were 0.90 and 1.57 in the tuber formation stage, 0.87 and 2.16 in the tuber expansion stage, and 0.63 and 3.01 in the starch accumulation stage. This study presents a new approach for monitoring the chlorophyll content of potatoes, and a corresponding estimating model can be selected based on the specific potato growth stage and different experimental treatments in future.
叶绿素是植物光合作用中最重要的色素, 与产量形成密切相关, 因此, 在农业生产中常用叶绿素含量来监测农作物生长状况[1]。 马铃薯是全球第四大粮食作物, 其叶片的叶绿素含量是衡量生长状况的重要指标, 实现对马铃薯冠层叶绿素含量变化的监测, 可以及时掌握其生长状况, 有助于提高马铃薯产量。 传统的马铃薯叶绿素含量测量主要以分光光度计法为主, 该方法测量的叶绿素含量更加精准, 但是对作物的破坏程度大, 且费时费力, 测量步骤繁琐, 很难实现大批量的测量[2]。 而手持式叶绿素含量测定仪的出现在一定程度上解决了传统方法的弊端, 通过测量马铃薯叶片对红光波段和近红外波段的吸收率, 计算得到叶绿素相对含量, 即SPAD值。 有学者研究表明, 使用手持式叶绿素含量测定仪获取的相对叶绿素含量与传统方法测定的叶绿素含量之间存在显著相关性[3]。 尽管该方法能够无损、 快速地测量马铃薯叶片叶绿素相对含量, 但由于需要对马铃薯叶片逐个测量, 很难运用在大空间尺度上。
近年来, 遥感技术以其快速、 高效、 无损的特点被广泛应用于农作物长势监测中, 而近低空无人机遥感平台以其作业周期短、 灵活性高、 运行和维护成本低等优势代替了航天遥感和地面遥感, 应用于中小尺度的农田中, 以获取更准确的作物生长参数[4]。 多光谱传感器相较于可见光相机增加了红边和近红外波段, 与高光谱相机相比, 成本低、 质量小、 数据处理简单, 能够更加经济且有效的大范围监测作物长势[5]。 目前, 已有大量研究开展了基于无人机多光谱的植物叶绿素含量反演工作。 在之前的研究中, 研究学者通过使用单一植被指数构建叶绿素含量反演模型。 于丰华[6]等对水稻叶绿素含量进行了反演, 发现使用红边优化指数(ORVI)可以建立的叶绿素含量反演模型决定系数为0.726, 能够用于水稻叶绿素含量预测。 苏伟等[7]使用无人机获取的遥感影像反演玉米冠层的叶绿素含量, 将不同分辨率下(0.1~1 m)的不同植被指数与地面实测数据进行回归分析, 研究发现, 分辨率为0.1 m时, 红边归一化植被指数(NDVIre)与地面实测叶绿素含量之间的决定系数R2为0.7, 说明使用NDVIre预测玉米叶绿素含量是可行的。 也有学者[8]使用无人机搭载多光谱获取甜菜的冠层遥感影像, 使用不同植被指数与叶绿素含量实测数据进行拟合, 得出土壤调整植被指数(OSAVI)拟合效果最好。 同时有研究发现, 使用一阶微分光谱指数作为输入变量建立的大豆叶绿素含量预测模型决定系数达到0.836, 可以用来预测大豆叶绿素含量[9]。 虽然使用单一植被指数建立的模型可用来预测作物的叶绿素含量, 但是对于使用多种植被指数作为自变量是否会影响叶绿素含量反演模型的精度尚不明确。 因此, 有学者使用多种植被指数组合作为自变量, 研究了使用统计回归方法是否能提高叶绿素含量反演模型的精度。 其中, 王丹等[10]使用无人机搭载多光谱相机对玉米主要生育期叶绿素含量进行监测及反演模型构建, 发现以三种植被指数为自变量构建的多元线性回归模型精度更高更稳定。 田明璐等[11]研究发现使用多元逐步回归建立的棉花冠层叶绿素含量反演模型精度更高。 陈鹏等[12]在马铃薯冠层叶绿素含量反演模型研究中, 不仅将多种植被指数作为自变量, 还引入了纹理特征的参数, 结果表明, 使用植被指数与纹理特征组合可以提高叶绿素含量反演模型的精度。 前人的研究表明, 增加输入变量可提高叶绿素含量反演模型的精度, 但是当变量增多时, 统计回归算法的拟合效果并不理想。 而机器学习是有效开发预测模型的一种方法, 当输入变量增多时, 机器学习的拟合效果优于统计回归算法, 近年来常用于表型反演模型的构建, 其预测精度均高于统计回归模型的预测精度[13]。 常用于植物叶绿素含量反演模型构建的机器学习算法主要有支持向量机回归(SVR)、 随机森林回归(RFR)、 决策树回归(DTR), 目前已应用于水稻[14][15]、 小麦[16, 17]、 玉米[18]、 苹果[19]、 柑橘[20]等植物中叶绿素含量的估算, 但是, 机器学习在马铃薯中的应用还鲜有报道。
因此, 为进一步提高马铃薯叶绿素含量估算精度, 本研究以西北地区马铃薯为研究对象, 使用无人机搭载多光谱相机获取马铃薯全生育期的冠层遥感影像, 同期测量马铃薯叶片叶绿素含量, 分析13种植被指数与叶绿素含量之间的相关性, 选择0.05水平下显著相关的植被指数作为输入变量, 使用机器学习算法构建马铃薯关键生育期最佳的叶绿素含量反演模型, 以期实现监测马铃薯冠层叶绿素含量的生长动态变化, 为田间精准管理提供理论依据。
试验区位于甘肃省白银市景泰县条山农场(103.59° E, 37.09° N), 土壤类型以砂壤土为主, 年平均降雨量为185.5 mm, 年平均气温8.2 ℃, 无霜期191 d, 年平均太阳辐射5.3× 104 MJ· m-2。
本研究供试材料为34份马铃薯栽培品种, 所有供试材料的脱毒种薯由甘肃省定西市马铃薯研究所提供, 试验编号如表1所示。 试验采用随机区组试验设计, 设对照(CK)和干旱(D)两个处理, 其中每个处理设34个小区(每个品种种植一个小区), 每个小区4垄, 每垄25株, 株距20 cm, 垄宽为60 cm, 垄高为20 cm, 行距60 cm, 小区面积1.2 m× 5 m=6 m2, 采用垄上滴灌的栽培方式, 垄面中央铺设16 mm的滴灌带, 滴孔间距为20 cm。 对照(CK)处理田间持水量约为60%, 3 d一次, 每次浇水2 h, 干旱(D)处理田间持水量约为30%, 3 d一次, 每次浇水1 h。 播前一周施用基肥, 复合肥(N:P:K=17:17:17)80 kg· hm-2, 播种后55 d开始, 每隔15 d追施尿素10 kg· hm-2。 图1为本研究试验小区设计。
| 表1 34份马铃薯品种试验编号 Table 1 Test numbers of 34 potato varieties |
 | 图1 本研究试验小区设计 注: 图为播种后55 d的RGB影像Fig.1 Design of experimental plot in this study Note: The picture shows the RGB image 55 d after sowing |
马铃薯叶绿素含量使用手持式SPAD-502 plus叶绿素计于2021年7月3日(块茎形成期, 播种后70 d)、 7月18日(块茎膨大期, 播种后85 d)、 8月2日(淀粉积累期, 播种后100 d)进行测量, 每个小区随机选取3株, 每株选择倒3叶的顶小叶, 每个叶片测量三次并记录平均值[21]。
使用大疆悟inspire 2四旋翼无人机平台, 无人机净重3.44 kg, 最大起飞重量4.25 kg, 最大飞行时间23 min。 无人机搭载的多光谱相机为MicaSense Altum多光谱相机, 质量354 g, 焦距8 mm, 拍照最小时间间隔1 s, 图像大小2 064像素× 1 544像素, 输出位深12 bit, 中心波长和带宽如表2所示。
| 表2 多光谱相机中心波长和带宽 Table 2 Central wavelength and bandwidth of multispectral camera |
遥感数据采集与地面数据同期进行, 为减小大气对遥感影像质量的影响, 选择无云低风的晴朗天气, 于11:00—14:00之间采集。 使用DJI Pilot APP 选择试验区范围并规划航线自主飞行。 设置飞行高度40 m, 拍摄方式为等时间间隔拍照, 时间间隔1.5 s, 设置航向重叠率80%, 旁向重叠率85%, 图像空间分辨率1.73 piexl。
1.5.1 遥感数据预处理
使用Pix4Dmapper软件对采集的遥感影像数据进行拼接处理, 同时导入每次飞行前拍摄的校准板照片进行辐射校正, 最终可以生成该试验区地物反射率的正射影像图。 在Arcgis软件中对正射影像图进行掩膜裁剪处理, 提取指定点的单波段反射率, 每个小区随机选取12点, 每4个点的反射率取平均值(图2), 在Excel 2019中对单波段反射率进行统计并计算植被指数, 植被指数计算公式如表3所示, 得到的各小区植被指数将作为叶绿素含量估测模型的输入变量。
 | 图2 指定点反射率 注: 图为播种后55 d的RGB影像Fig.2 Reflectivity of marking point Note: The picture shows the RGB image 55 d after sowing |
| 表3 植被指数计算公式 Table 3 Calculation formula of vegetation index |
1.5.2 模型构建与精度评价
由于受到环境的影响, 第4、 第5、 第17小区的马铃薯品种与其他马铃薯品种出苗时间相差一个月以上, 将以上三个小区剔除(图1), 因此, 建模中使用的样本数据量为93组数据, 根据相关文献的报道[20], 随机选取样本数据的70%(65组数据)进行模型反演, 30%(28组数据)来作验证集进行模型精度评价。 使用多元线性回归(MLR)、 支持向量机回归(SVR)、 随机森林回归(RFR)、 决策树回归(DTR)四种机器学习算法分别建立马铃薯叶绿素含量反演模型, 以上回归算法均在Pytion中使用sklearn工具包实现。
(1)多元线性回归(multiple linear regression, MLR): 多元线性回归是使用多个自变量对因变量进行解释的一种回归方法, 多元线性回归方法要求自变量与因变量之间要有显著的相关性[31]。
(2)支持向量机回归(support vector machine regression, SVR): 支持向量机是一种基于结构风险最小化原理发展起来的有监督机器学习算法, 可以用来解决模式识别和数据分析的回归和分类问题。 SVM在解决回归问题时, 采用的原理是先将数据通过非线性变换映射到高维特征空间, 然后在该空间建立线性模型来拟合回归函数。 但是SVM算法难以实现大规模样本的训练, 且无法解决多分类问题。 可用来实现非线性转换的核函数有: 线性核函数(Linear)、 多项式核函数(Polynomial)和径向基核函数(RBF)[32]。
(3)随机森林回归: (random forest regression, RFR)随机森林是一种有监督的机器学习方法, 该算法实质是一个包含多个决策树的分类器, 它结合多个决策树形成了一个“ 森林” , 这些决策树随机形成, 因此又叫作随机决策树, 可用来解决分类和回归问题, 即可以同时处理分类和数值特征, 并且随机森林可以通过平均决策树降低过拟合的风险。 同时, 该方法也存在部分缺点, 如: 在分类或者回归问题的训练数据中存在噪音; 比决策树算法更复杂, 计算成本更高。 随机森林中有三个主要参数, 分别是随机森林中树的个数(n_estimators)、 树节点的最小样本数(min_sample_leaf)和每个分支的特征个数(max_features)[33]。 本研究中通过调整树的个数来调整模型的精度, 其他参数保持默认值。
(4)决策树回归(decision tree regression, DTR): 决策树起源于机器学习理论, 是解决分类和回归问题的的非参数监督学习方法。 决策树采用的是从高层次特征到低层次特征解决问题的思想。 决策树模型是一种树状结构, 建立模型时需要从决策树的根节点开始, 逐步向下决策得到最终结果。 但是决策树模型容易出现过拟合的现象, 使得模型的泛化能力很低[34]。
采用决定系数R2和均方根误差RMSE评价叶绿素含量模型的精度。 R2越大, RMSE越小, 模型的精度越高。
对不同处理下31个马铃薯品种中获取的13种植被指数与叶绿素含量进行Pearson相关性分析, 结果如图3—图5所示。
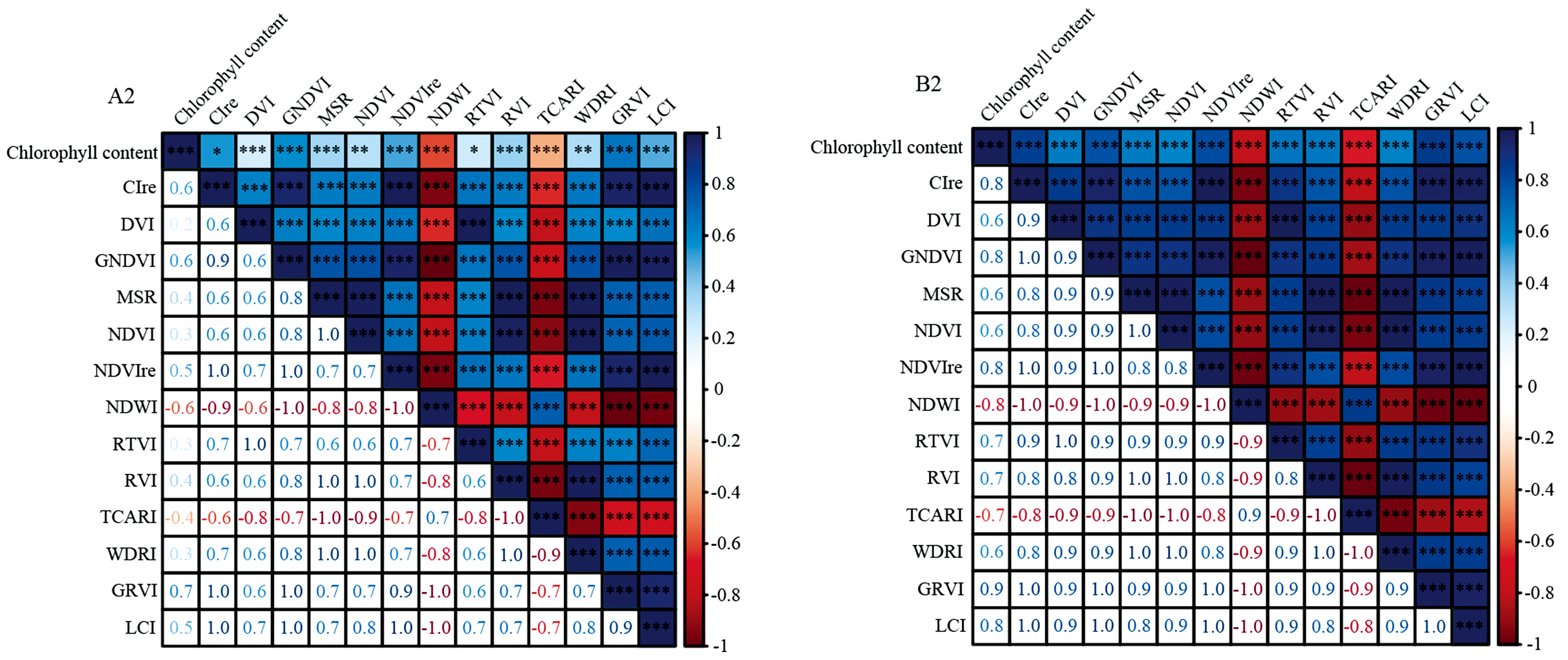 | 图3 块茎形成期叶绿素含量与植被指数相关性分析 注: * 表示在0.05水平上显著; * * 表示在0.01水平上显著; * * * 表示在0.001水平上显著; A2表示块茎形成期对照处理; B2表示块茎形成期干旱处理Fig.3 Correlation analysis between chlorophyll content and vegetation index in tuber formation stage Note: * indicates significantly correlation at 0.05 level; * * indicates significantly correlation at 0.01 level; * * * indicates significantly correlation at 0.001 level; A2 represents control treatment in tuber formation stage; B2 represents drought treatment in tuber formation stage |
 | 图4 块茎膨大期叶绿素含量与植被指数相关性分析 注: * 表示在0.05水平上显著; * * 表示在0.01水平上显著; * * * 表示在0.001水平上显著; A3表示块茎膨大期对照处理; B3表示块茎膨大期干旱处理Fig.4 Correlation analysis between chlorophyll content and vegetation index in tuber expansion stage Note: * indicates significantly correlation at 0.05 level; * * indicates significantly correlation at 0.01 level; * * * indicates significantly correlation at 0.001 level; A3 represents control treatment in tuber expansion stage; B3 represents drought treatment in tuber expansion stage |
 | 图5 淀粉积累期叶绿素含量与植被指数相关性分析 注: * 表示在0.05水平上显著; * * 表示在0.01水平上显著; * * * 表示在0.001水平上显著; A4表示淀粉积累期对照处理; B4表示淀粉积累期干旱处理Fig.5 Correlation analysis between chlorophyll content and vegetation index in starch accumulation stage Note: * indicates significantly correlation at 0.05 level; * * indicates significantly correlation at 0.01 level; * * * indicates significantly correlation at 0.001 level; A4 represents control treatment in starch accumulation stage; B4 represents drought treatment in starch accumulation stage |
块茎形成期叶绿素含量与植被指数相关性分析结果如图3所示, 对照处理下, 叶绿素含量与植被指数的相关系数绝对值在0.2~0.7之间, GRVI与叶绿素含量的相关系数绝对值最高, DVI与叶绿素含量的相关系数绝对值最低, CIre和RTVI与叶绿素含量在0.05水平上显著相关, NDVI和WDRI与叶绿素含量在0.01水平上极显著相关, 其他植被指数与叶绿素含量均在0.001水平上极显著相关, 除NDWI与TCARI外, 其他植被指数均与叶绿素含量呈正相关; 干旱处理下, 叶绿素含量与植被指数的相关系数绝对值在0.6~0.9之间, GRVI与叶绿素含量的相关系数绝对值最高, DVI、 MSR、 NDVI和WDRI与叶绿素含量的相关系数绝对值最低, 所有植被指数与叶绿素含量均在0.001水平上极显著相关, 除NDWI与TCARI外, 其他植被指数均与叶绿素含量呈正相关。 因此, 在对照处理中, 可作为马铃薯块茎形成期叶绿素含量反演模型输入变量的植被指数有: CIre、 GNDVI、 NDVIre、 NDWI、 GRVI、 LCI; 在干旱处理中, 13种植被指数均可作为马铃薯块茎形成期叶绿素含量反演模型的输入变量。
块茎膨大期叶绿素含量与植被指数相关性分析结果如图4所示, 对照处理下, 叶绿素含量与植被指数的相关系数绝对值在0.6~0.8之间, CIre、 GNDVI、 NDVIre、 NDWI、 GRVI与叶绿素含量的相关系数绝对值最高, DVI和RTVI与叶绿素含量的相关系数绝对值最低, 所有植被指数与叶绿素含量均在0.001水平上极显著相关, 除NDWI与TCARI外, 其他植被指数均与叶绿素含量呈正相关; 干旱处理下, CIre、 GNDVI、 NDVIre、 NDWI、 RTVI、 GRVI、 LCI与叶绿素含量的相关系数绝对值为0.9, DVI、 MSR、 NDVI、 RVI、 TCARI、 WDRI与叶绿素含量的相关系数绝对值为0.8, 所有植被指数与叶绿素含量均在0.001水平上极显著相关, 除NDWI与TCARI外, 其他植被指数均与叶绿素含量呈正相关。 因此, 在对照处理和干旱处理中, 13种植被指数均可作为马铃薯块茎膨大期叶绿素含量反演模型的输入变量。
淀粉积累期叶绿素含量与植被指数相关性分析结果如图5所示, 对照处理下, 叶绿素含量与植被指数的相关系数绝对值在0.8~0.9之间, 所有植被指数与叶绿素含量均在0.001水平上极显著相关, 除NDWI与TCARI外, 其他植被指数均与叶绿素含量呈正相关; 干旱处理下, 叶绿素含量与植被指数的相关系数绝对值均为0.6, 所有植被指数与叶绿素含量均在0.001水平上极显著相关, 除NDWI与TCARI外, 其他植被指数均与叶绿素含量呈正相关。 因此, 在对照处理和干旱处理中, 13种植被指数均可作为马铃薯淀粉积累期叶绿素含量反演模型的输入变量。
综上, 在对照处理块茎形成期, 使用CIre、 GNDVI、 NDVIre、 NDWI、 GRVI、 LCI作为输入变量, 在马铃薯其他生育时期, 13种植被指数均可作为马铃薯叶绿素含量反演模型的输入变量。
将不同植被指数作为自变量, 实测叶绿素含量作为因变量, 使用MLR、 SVR、 RFR和DTR等算法分别建立马铃薯叶绿素含量反演模型。 根据经验及多次试验, SVR算法使用径向基核函数, RFR算法的分类树为100, DTR算法的决策树深度为2, 其他参数为默认值。 不同算法得出的建模精度和验证精度的结果如表4、 表5所示。
| 表4 对照处理下马铃薯不同生育期叶绿素含量估算模型比较 Table 4 Comparison of estimation models of potato chlorophyll content at different growth stages under control treatment |
| 表5 干旱处理下马铃薯不同生育期叶绿素含量估算模型精度 Table 5 Comparison of estimation models of potato chlorophyll content at different growth stages under drought treatment |
在对照处理块茎形成期, RFR模型建模精度相较于MLR、 SVR和DTR模型, R2分别提高了0.34、 0.43和0.37, RMSE分别降低了2.36、 2.90和2.50; SVR模型验证精度相较于MLR、 RFR和DTR模型, R2分别提高了0.10、 0.19和0.14, RMSE分别降低了0.59、 0.84和1.61(表4)。 说明RFR模型对马铃薯叶片叶绿素含量的估算精度高于MLR、 SVR和DTR模型, 但SVR模型稳定性优于MLR、 RFR和DTR模型, 因此, 在对照处理块茎形成期可使用SVR模型预测马铃薯叶片叶绿素含量。
在对照处理块茎膨大期, RFR模型建模精度相较于MLR、 SVR和DTR模型, R2分别提高了0.19、 0.24和0.21, RMSE分别降低了1.54、 1.93和1.72; SVR模型验证精度相较于MLR、 RFR和DTR模型, R2分别提高了0.08、 0.02和0.12, RMSE分别降低了0.46、 0.16和0.59(表4)。 说明RFR模型对马铃薯叶片叶绿素含量的估算精度高于MLR、 SVR和DTR模型, 但SVR模型稳定性优于MLR、 RFR和DTR模型, 因此, 在对照处理块茎膨大期可使用SVR模型预测马铃薯叶片叶绿素含量。
在对照处理淀粉积累期, RFR模型建模精度相较于MLR、 SVR和DTR模型, R2分别提高了0.19、 0.29和0.20, RMSE分别降低1.88、 2.62和1.95; 在验证模型中, SVR模型的R2与DTR模型相同, 相较于MLR和RFR模型分别提高了0.05和0.02, 相较于MLR、 RFR和DTR模型, SVR模型的RMSE分别降低了0.08、 0.29和0.12(表4)。 说明RFR模型对马铃薯叶片叶绿素含量的估算精度高于MLR、 SVR和DTR模型, 但SVR模型稳定性优于MLR、 RFR和DTR模型, 因此, 在对照处理淀粉积累期可使用SVR模型预测马铃薯叶片叶绿素含量。
由表5可知, 在干旱处理块茎形成期, RFR模型相较于MLR、 SVR和DTR模型, 建模精度的R2分别提高了0.10、 0.22和0.20, RMSE分别降低了0.69、 1.49和1.16; 验证精度的R2分别提高0.06、 0.12和0.37, RMSE分别降低了0.10、 0.54和1.45。 说明RFR模型对马铃薯叶片叶绿素含量的估算精度高于MLR、 SVR和DTR模型, 且RFR模型的稳定性高于MLR、 SVR和DTR模型, 因此, 在干旱处理块茎形成期可使用RFR模型预测马铃薯叶片叶绿素含量。
在干旱处理块茎膨大期, RFR模型相较于MLR、 SVR和DTR模型, 建模精度的R2分别提高了0.09、 0.15和0.14, RMSE分别降低了1.15、 1.63和1.53; 验证精度的R2分别提高了0.17、 0.03和0.01, RFR模型的RMSE与SVR模型相同, 相较于DTR模型提高了0.09, 与MLR模型相比降低了0.77(表5)。 说明RFR模型对马铃薯叶片叶绿素含量的估算精度高于MLR、 SVR和DTR模型, 总体来看, RFR、 SVR、 DTR三种模型的验证精度几乎相同, 均高于MLR模型, 但是RFR模型的R2高于SVR和DTR模型, 因此RFR模型的稳定性高于MLR、 SVR和DTR模型, 因此, 在干旱处理块茎膨大期可使用RFR模型预测马铃薯叶片叶绿素含量。
在干旱处理淀粉积累期, RFR模型相较于MLR、 SVR和DTR模型, 建模精度的R2分别提高了0.40、 0.56和0.22, RMSE分别降低了1.91、 2.51和1.18; 在验证精度中, RFR模型相较于MLR、 SVR和DTR模型, R2分别提高了0.62、 0.04和0.53, RMSE分别降低了3.31、 0.51和2.09(表5)。 说明RFR模型对马铃薯叶片叶绿素含量的估算精度高于MLR、 SVR和DTR模型, 且RFR模型的稳定性高于MLR、 SVR和DTR模型。 因此, 在干旱处理淀粉积累期可使用RFR模型预测马铃薯叶片叶绿素含量。
综上所述, 本文选择SVR回归算法构建对照处理的马铃薯叶片叶绿素含量估算模型, 选择RFR回归算法构建干旱处理的马铃薯叶片叶绿素含量估算模型, 不同生育期叶绿素含量最佳预测模型如图6—图8所示。
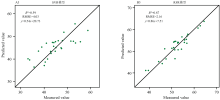
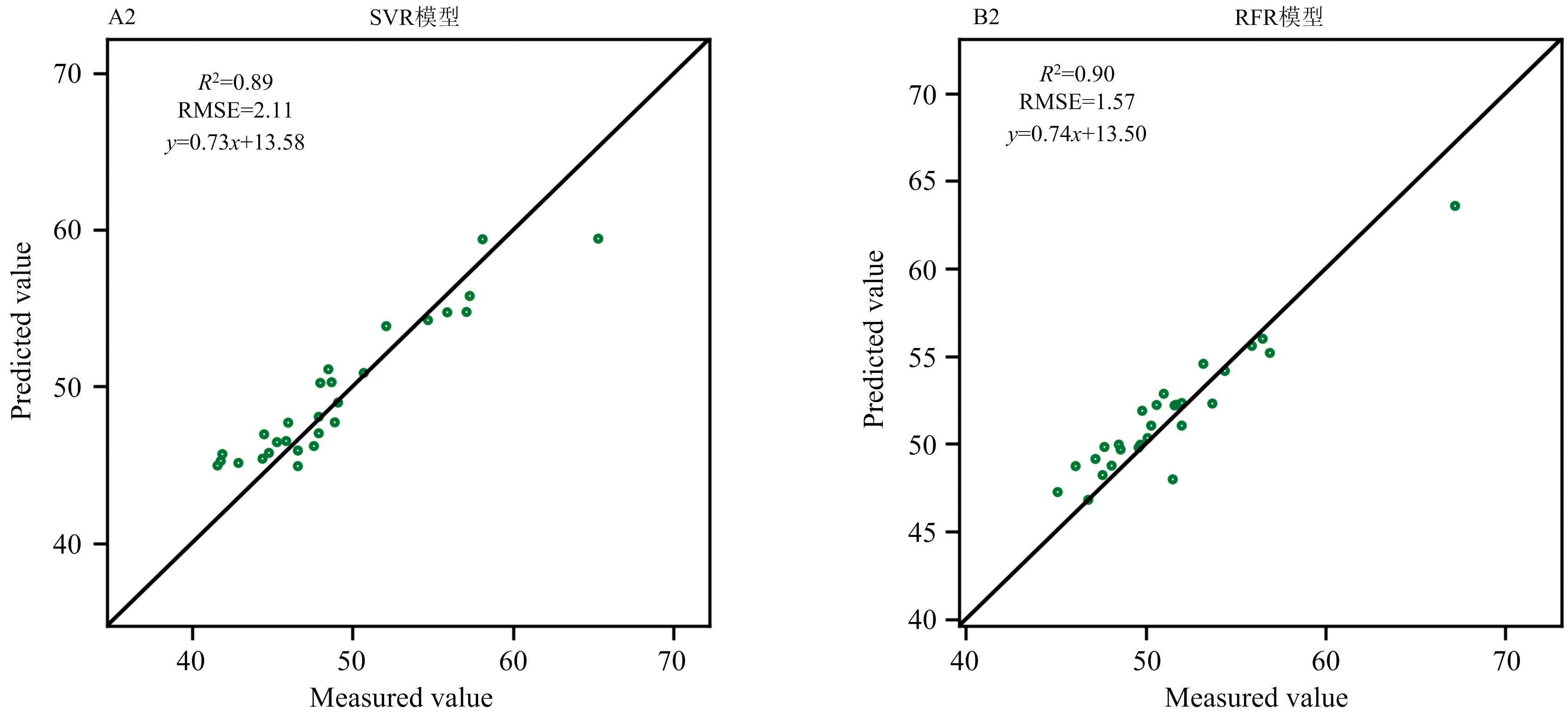 | 图6 块茎形成期叶绿素含量最佳预测模型 A2表示块茎形成期对照处理; B2表示块茎形成期干旱处理Fig.6 Optimal prediction model of chlorophyll content in tuber formation stage A2 represents control treatment in tuber formation stage; B2 represents drought treatment in tuber formation stage |
 | 图7 块茎膨大期叶绿素含量最佳预测模型 A3表示块茎膨大期对照处理; B3表示块茎膨大期干旱处理Fig.7 Optimal prediction model of chlorophyll content in tuber expansion stage A3 represents control treatment in tuber expansion stage; B3 represents drought treatment in tuber expansion stage |
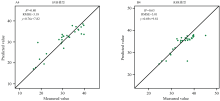
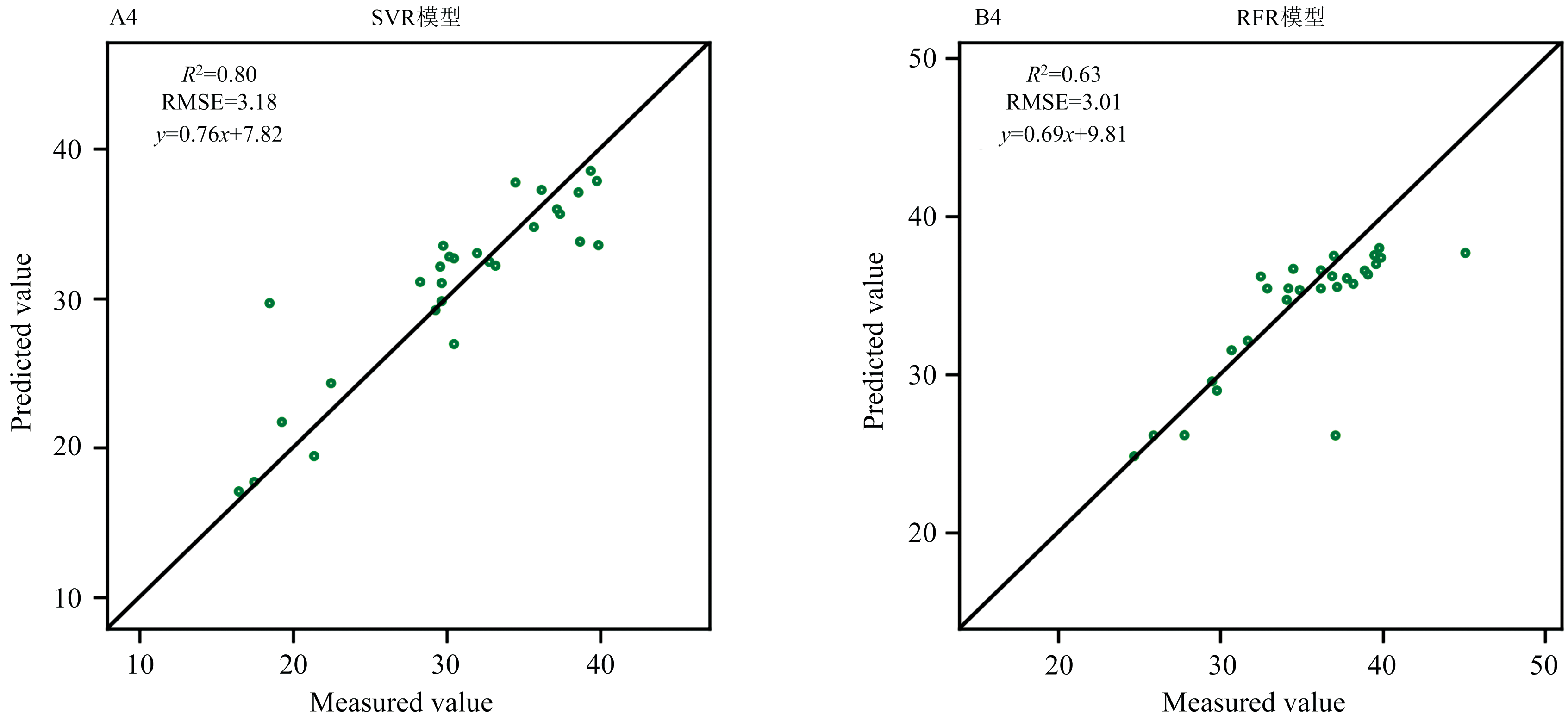 | 图8 淀粉积累期叶绿素含量最佳预测模型 A4表示淀粉积累期对照处理; B4表示淀粉积累期干旱处理Fig.8 Optimal prediction model of chlorophyll content in starch accumulation stage A4 represents control treatment in starch accumulation stage; B4 represents drought treatment in starch accumulation stage |
目前, 作物表型监测主要以卫星遥感、 高光谱和多光谱为主, 卫星遥感虽然可以实现大面积监测, 但存在空间分辨率低的不足, 且难以实现小区域作物表型的监测[35]。 高光谱和多光谱监测可以解决小区域作物表型难以监测的问题, 但是高光谱监测也存在设备成本高, 数据量大, 处理难度高等问题。 本文基于轻小型无人机平台搭载多光谱相机, 获取了马铃薯关键生育期影像数据, 根据前人的研究结果, 选择与叶绿素含量相关性较高的植被指数, 通过不同的机器学习算法, 筛选出对马铃薯叶绿素含量的估测效果更好的模型, 为马铃薯含量的快速估算提供了新方法。
结果表明, 在对照处理块茎形成期, CIre、 GNDVI、 NDVIre、 NDWI、 GRVI、 LCI与叶绿素含量之间的相关系数绝对值在0.5以上, 且存在显著(p< 0.05)或极显著(p< 0.01)的相关性(图3); 在马铃薯其他生育时期及干旱处理中, 13种植被指数与叶绿素含量之间的相关系数绝对值均在0.5以上, 且存在极显著(p< 0.01或p< 0.001)的相关性(图3—图5)。 但从块茎形成期到淀粉积累期, 植被指数与叶绿素含量相关性的变化无明显的规律, 可能是不同生育期的植被指数对叶绿素含量的敏感程度不一样, 陶惠林等[35]在对冬小麦产量估算的研究中也出现类似的结果。 在对照处理中, RFR模型的建模精度是最高的, 但是验证精度出现了降低的现象, 其原因可能是RFR模型受到模型参数的影响, 在生成的树中出现了差异较小的树, 这些树影响了部分正确的决策。 有研究报道[16], 小麦叶绿素含量估算中也出现了RFR模型验证精度下降的问题, 在模型选择时主要参考验证模型的结果, 因此本研究在选择最优模型时以验证精度为主, 建模精度为辅。 此外, 在干旱处理淀粉积累期, MLR和DTR模型的验证精度均出现明显的下降, 可能是因为干旱胁迫导致马铃薯生育后期地上部分枯萎, 使13种植被指数与叶绿素含量之间的相关系数绝对值与对照处理相比出现了降低; 而RFR模型的验证精度未出现明显下降, 说明在马铃薯受到干旱胁迫时, 使用RFR模型预测马铃薯叶片叶绿素含量是可行的。
Cavallo[36]等研究发现, 蔬菜叶绿素含量估测最佳模型为RFR模型, 估测模型的R2为0.90。 Shah[17]等在小麦叶绿素含量反演中的研究结果表明, RFR模型对叶绿素含量的预测效果是最好, 估测模型的R2为0.90。 王丽爱[16]等对不同机器学习算法估测小麦各生育期叶绿素含量的模型进行了比较, 结果表明, RFR模型在小麦拔节、 孕穗、 开花期的估测效果均是最好, R2分别为0.89、 0.85、 0.80。 但是, 王念一[14]等和张卓然[37]等在小麦和棉花中的研究结果与之不同, 以SVR算法构建的叶绿素含量估测模型是最优的。 在本研究中, SVR模型在对照处理块茎形成期、 块茎膨大期和淀粉积累期的预测效果均是最佳; 同时, RFR模型在干旱处理块茎形成期、 块茎膨大期和淀粉积累期的预测效果均是最佳(表4、 表5)。 因此, 后期在监测马铃薯不同生育期或不同试验处理的叶绿素含量时可选择相应的估测模型, 为实现马铃薯全生育期叶绿素含量动态监测提供参考。
利用三种机器学习算法反演马铃薯叶片叶绿素含量, 相较于前人的研究结果, 模型精度均有所提高, 其中SVR模型在对照处理块茎形成期、 块茎膨大期和淀粉积累期的预测效果均是最佳, R2和RMSE在块茎形成期为0.89和2.11, 块茎膨大期为0.59和4.03, 淀粉积累期为0.80和3.18; RFR模型在干旱处理块茎形成期、 块茎膨大期和淀粉积累期的预测效果均是最佳, R2和RMSE在块茎形成期为0.90和1.57, 在块茎膨大期为0.87和2.16, 在淀粉积累期为0.63和3.01。 上述结论表明机器学习可提高马铃薯叶片叶绿素反演精度, 研究结果可为不同生育期或不同处理下马铃薯叶绿素含量反演提供参考, 以期为精准农业管理提供技术支持。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
|
| [30] |
|
| [31] |
|
| [32] |
|
| [33] |
|
| [34] |
|
| [35] |
|
| [36] |
|
| [37] |
|