





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
宽光谱多参数激光告警探测研究
[张瑞1, 2, *  , 杨雪梅
, 杨雪梅1, 2 , 石金1, 2 , 张子暄1, 2 , 丁鑫1 , 李晓1 , 王志斌1, 2 , 李孟委2, * ]
, 杨雪梅]
|
|


作者简介: 张 瑞, 1987年生, 中北大学山西省光电信息与仪器工程技术研究中心教授 e-mail: zhangrui@nuc.edu.cn
随着激光技术的发展, 激光武器得到了快速发展, 针对来袭激光的威胁, 激光告警也成为目前各国发展的重点, 不同的激光告警系统探测不同的参数, 根据告警参数采取相应的躲避和反击措施; 目前激光告警主要探测参数有来袭激光方位角、 俯仰角、 激光波长、 激光脉冲宽度等, 但现有激光告警系统无法实现多参数的同时探测, 且光谱范围窄、 视场小、 探测俯仰角和方位角为相对角度、 无法获得绝对来袭方向。 为此本文提出宽光谱波段、 大视场、 多参数激光告警新方法, 可实现450~1 700 nm宽光谱来袭激光波长、 绝对方位角、 绝对俯仰角、 脉冲宽度多参数的高精度综合测量, 该方法主要由激光脉冲宽度测量、 绝对角度及激光波长测量、 控制及数据处理三大部分组成。 其中脉冲宽度测量模块由光学镜头、 多带通窄带滤光片、 高速光电探测器组成, 实现来袭脉冲激光的高速光电转换; 绝对角度及激光波长测量模块由光栅、 大视场宽波段消色差镜头、 多带通窄带滤光片、 宽波段面阵探测器、 三维电子罗盘组成, 通过一级和零级衍射光斑位置获得来袭激光波长、 相对方位角和相对俯仰角信息, 结合三维电子罗盘测得的方位角、 俯仰角以及横滚角, 进而获得来袭激光的三维绝对方位角和绝对俯仰角。 多带通窄带滤光片主要是根据常用几个军用激光波长进行选通滤光, 有效滤除背景光的影响, 降低系统虚警、 漏警。 理论分析推导具体测量方法和参数, 设计宽光谱多参数激光告警探测系统样机, 并进行实验可行性验证。 实验结果表明, 该系统的方位角视场120°、 俯仰角视场96°、 角度测量精度优于1°、 中心波长测量精度优于10 nm、 脉宽测量精度优于3 ns。 该技术将为海、 陆、 空、 天领域对来袭激光的高精度多参数综合探测奠定基础, 有望提高复杂战场的生存能力。
, YANG Xue-mei
With the development of laser technology, laser warning technology has become the focus of research in various countries to achieve defense against various incoming lasers, and corresponding evasion and counterattack measurements are taken according to the parameters detected by the laser warning system. At present, the main parameters of laser warning detection include incoming laser azimuth, pitch angle, laser wavelength and laser pulse width. However, the existing laser warning system can not achieve multi-parameter simultaneous detection, and the absolute direction of the incoming laser cannot be obtained due to the narrower spectral range, limited field of view, and relative azimuth angle of detection. In this paper, a new method that broadband, large field of view, multi-parameter laser warning is proposed to realize the high-precision comprehensive measurement of the wavelength, absolute azimuth, absolute pitch angle, and pulse width of incoming laser in the range of 450~1 700 nm, which is mainly composed of laser pulse width measurement, absolute angle and laser wavelength measurement, control and data processing. The pulse width measurement module comprises an optical lens, multiband narrowband filter, and high-speed photodetector to realize the photoelectric conversion of the incoming pulsed laser. The absolute angle and laser wavelength measurement module that is composed of a grating, large field of view broadband achromatic lens, multiband narrowband filter, broadband area array detector, and a three-dimensional electronic compass can obtain the incoming laser wavelength, relative azimuth and relative pitch angle by the position of the first and zero diffraction spots. Then, combined with the measured direction angle, pitch angle and roll angle of the three-dimensional electronic compass, the incoming laser's three-dimensional absolute azimuth and absolute pitch angle are obtained. The multiband narrowband filter is mainly based on the strobe filter of several commonly used military laser wavelengths, which effectively filters out the influence of the background light and reduces the system's false warning and leakage warning. After the theoretical derivation and analysis of the measurement method and parameters, we design a broadband multi-parameter laser warning detection system prototype, verifying the experimental feasibility. The experimental results show that the system's azimuth and pitch angles can reach 120° and 96°, respectively. The angle measurement accuracy is better than 1°, the central wavelength measurement accuracy is better than 10 nm, and the pulse width measurement accuracy is better than 5 ns. This technology lays the foundation for the high-precision multi-parameter comprehensive detection of incoming lasers in the sea, land, air and space fields and is expected to improve the survivability in complex battlefields.
随着激光技术的发展, 激光装备在陆、 海、 空、 天等领域得到越来越广泛关注, 激光测距、 激光雷达、 激光制导、 激光侦查、 激光通信、 激光照明、 激光干扰、 激光窃听、 激光武器等激光装备已应用在现代战争中[1]。 目前, 美国、 俄罗斯、 德国、 法国、 以色列等军事强国都在研发激光武器。 由于激光告警设备可监测激光威胁, 进而采取相应的防护、 对抗等措施, 提高平台战场生存能力。 因此现在激光告警受到各国的高度关注, 高性能激光告警技术成为主要研究方向[2, 3, 4, 5, 6]。 目前的激光告警主要有两大类, 一类是只测角度不测激光波长[2, 7]; 另一类为进一步获得激光波长信息, 研究波长和角度同时告警的探测方法, 该类型主要有两种:
(1)光谱识别型激光告警, 可分为非成像型和成像型。 非成像光谱识别型激光告警, 角度分辨率低、 只能探测到特定波长的激光、 虚警率较高, 该类型有德国HLWE机载激光告警(角度分辨率5° ); 成像光谱识别型激光告警, 角度分辨率较高, 该类型有美国HALWR型激光告警(角度分辨率1° )。
(2)相干识别型激光告警技术, 利用激光的相干性进行判别可以实现激光波长和角度的同时探测, 主要有法布里-珀罗(F-P)型、 迈克尔逊型和光栅衍射型等种类。 法布里-珀罗(F-P)相干型具有较高的角度分辨率和波长分辨率, 但需要机械扫描、 工艺难度大、 稳定性比较差, 该类型有美国AN/AVR2型激光告警器; 迈克尔逊相干型激光告警, 根据干涉环的圆心位置和条纹间距可以判断出激光的入射角与波长, 可获取激光方位与波长信息, 但结构复杂、 工艺要求高、 数据处理困难, 该类型有美国LARA激光接收分析仪; 光栅衍射型激光告警, 根据零级和一级条纹的位置可判断出激光方向入射角与波长信息, 无需机械扫描, 对光学器件的工艺要求比迈克尔逊型的低, 干涉图样数据处理较简单, 具有较高的灵敏度、 角度和波长分辨率[8, 9], 该类型有美国Laser Event Recorder激光告警机(光谱范围0.4~1.1 μ m, 波长分辨率10 nm)。 为进一步提高测量精度, 研究人员从光学系统、 光斑提取、 电路等方面不断改进[10, 11, 12]。
但现有激光告警技术都无法实现宽波段、 大视场下, 来袭激光波长、 方位角、 俯仰角、 脉冲宽等多参数同时高精度探测器, 而且大部分激光告警只是获得激光相对于告警设备的相对角度信息, 无法获得来袭激光绝对方位角和俯仰角, 激光绝对角度便于告警信息分享, 实现复杂战场环境武器装备之间联动、 躲避和反击, 提高战场生存能力; 且获取来袭激光波长、 方向、 脉冲宽度信息能有助于判别来袭激光装备种类、 用途、 目的。 因此研究宽波段、 大视场来袭激光的波长、 绝对方位角、 绝对俯仰角、 脉冲宽度多个参数激光告警具有重大的意义。
宽波段多参数激光告警探测基本原理如图1所示, 主要由激光脉宽测量、 绝对角度及激光波长测量、 控制及数据处理三个单元组成。 其中脉宽测量单元由光学镜头、 多带通窄带滤光片、 高速光电探测器组成, 实现来袭脉冲激光的高速光电转换; 绝对角度及激光波长测量模块由光栅、 大视场宽波段消色差镜头、 多带通窄带滤光片、 宽波段面阵探测器、 三维电子罗盘组成, 通过对面阵探测器获得的激光衍射一级和零级衍射光斑的横纵坐标位置, 获得来袭激光波长、 相对方位角和相对俯仰角信息, 结合三维电子罗盘测得的系统方位角、 俯仰角以及横滚角, 进而获得来袭激光的绝对方位角和绝对俯仰角; 控制及数据处理单元主要是基于FPGA进行探测器控制、 激光脉宽计算、 光斑提交及波长角度等计算。 其中激光脉宽测量单元和绝对角度及激光波长测量单元中的多带通窄带滤光片主要是根据常用几个军用激光波长进行选通滤光, 有效滤除强背景光(太阳光、 闪电、 曳光弹及各种弹药爆炸产生的强背景光)影响, 有效避免由于强背景光导致的系统光斑提取误差大, 进而降低虚警、 漏警现象。
 | 图1 基于光栅衍射和电子罗盘的多参数激光告警测量原理图Fig.1 Schematic diagram of multi-parameter laser warning based on grating and electronic compass |
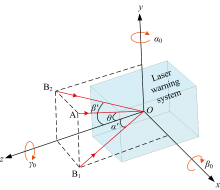
被测来袭激光角度如图2所示, 其中AO为来袭激光方向, AO在xoz平面投影为B1O, AO在yoz平面投影为B2O, 传统激光告警测得方位角α '和俯仰角β '(α '=∠B1Oz和β '=∠B2Oz), 该角度只是相对于激光告警的角度, 无法告知其他装备来袭激光绝对角度。 为此提出在多参数激光告警机上装入三维电子罗盘, 测得多参数激光告警机本身的三维姿态, 包括多参数激光告警机自身的方位角α 0、 俯仰角β 0和横滚角γ 0, 进而可以获得来袭激光的绝对方位角α 、 俯仰角β 、 横滚角γ 为
式(1)中, 多参数激光告警机自身的方位角α 0、 俯仰角β 0和横滚角γ 0由告警机上的三维电子罗盘可直接测得。 来袭激光相对于多参数激光告警机的方位角α '和俯仰角β '的基本测量原理如图3所示, 其中宽波段镜头等效焦距为f, 黑白光栅常数为d, 根据光栅衍射方程和镜头焦平面探测理论, 可得来袭相对方位角α '、 相对俯仰角β '和激光波长λ 为
结合三维电子罗盘测得的多参数激光告警机自身方位角α 0、 俯仰角β 0和横滚角γ 0, 将式(2)代入式(1)可测得来袭激光绝对方位角α 、 俯仰角β 、 横滚角γ 和激光波长λ 为
 | 图2 来袭激光绝对角度示意图Fig.2 Schematic diagram of laser absolute direction |
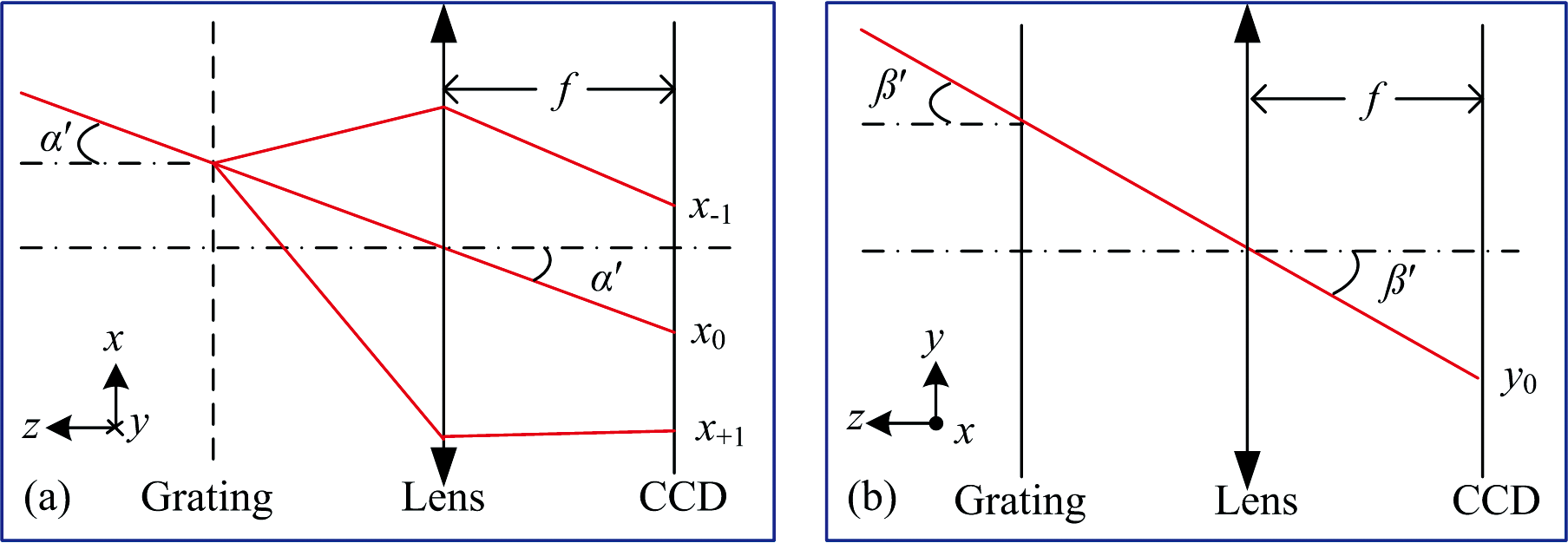 | 图3 相对方位角α ′和俯仰角β ′测量原理图 (a): 测量α ′原理示意图; (b): 测量β ′原理示意图Fig.3 Schematic diagram of measurement relative azimuth angle α ′ and relative pitch angle β ′ (a): Measurement relative azimuth angle α ′; (b): Measurement relative pitch angle β ' |
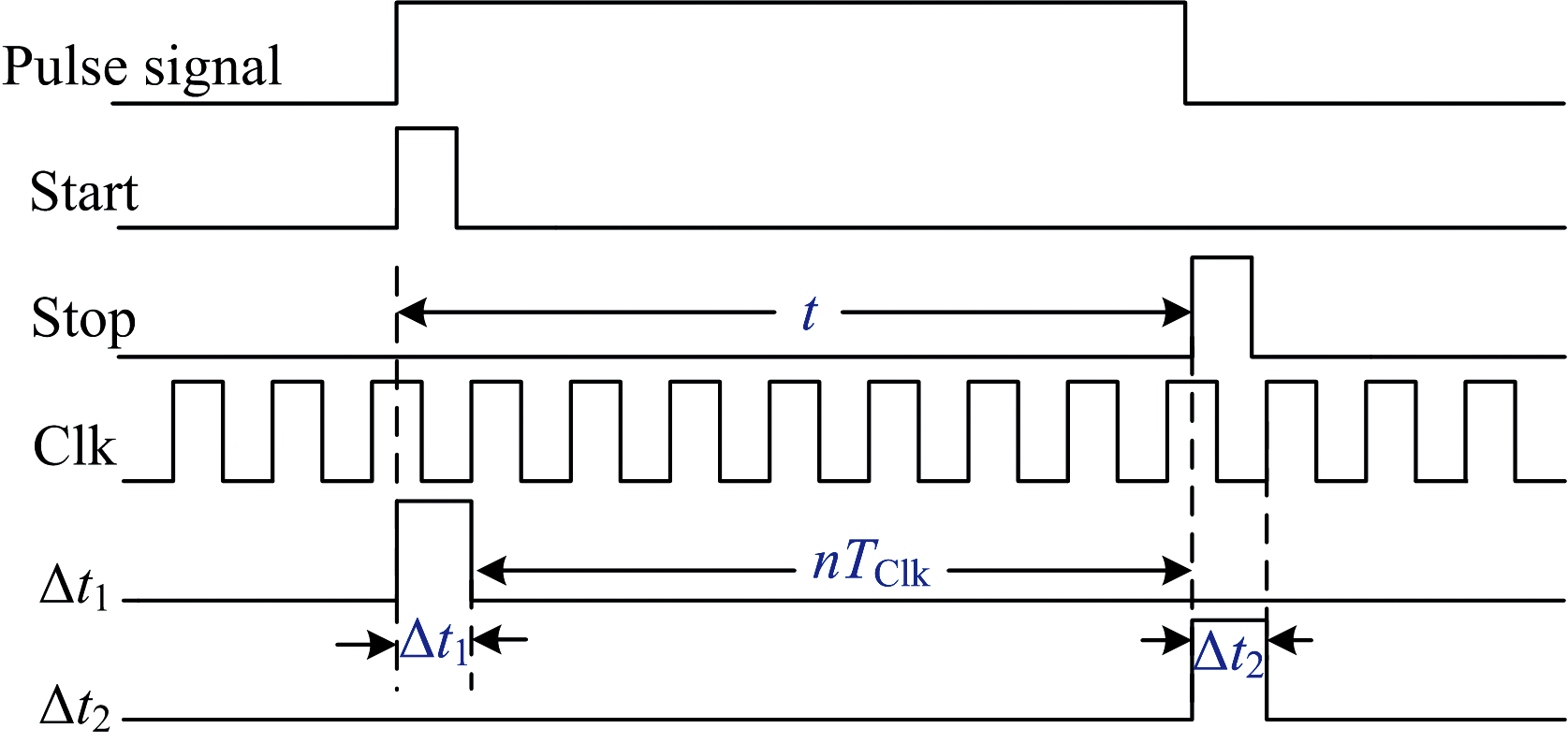
对来袭激光利用高速光电二极管转化为电信号, 经过放大滤波后输入FPGA进行处理。 采用FPGA构造粗细延时链来对脉冲宽度粗延时和细延时计数, 进而实现激光脉冲宽度测量。 基于FPGA设计时间数字转换(TDC)模块, 用来测量来袭激光脉冲上升沿和下降沿之间的时间间隔, TDC采用粗测量和细测量相结合的方法, 该方法可使系统具有较宽量程和较高分辨率, 脉宽测量原理如图4所示。
 | 图4 激光脉冲宽度测量原理图Fig.4 Schematic diagram of pulse width measurement |
将脉冲宽度转换成两个脉冲之间的时间间隔, 脉冲时间测量值t为式(4)
式(4)中, n为粗计数的时钟个数, tClk为粗计数时钟, Δ t1为脉冲上升沿到相邻第一个时钟上升沿之间的时间差, Δ t2为脉冲下降沿到相邻下一时钟上升沿之间的时间差。
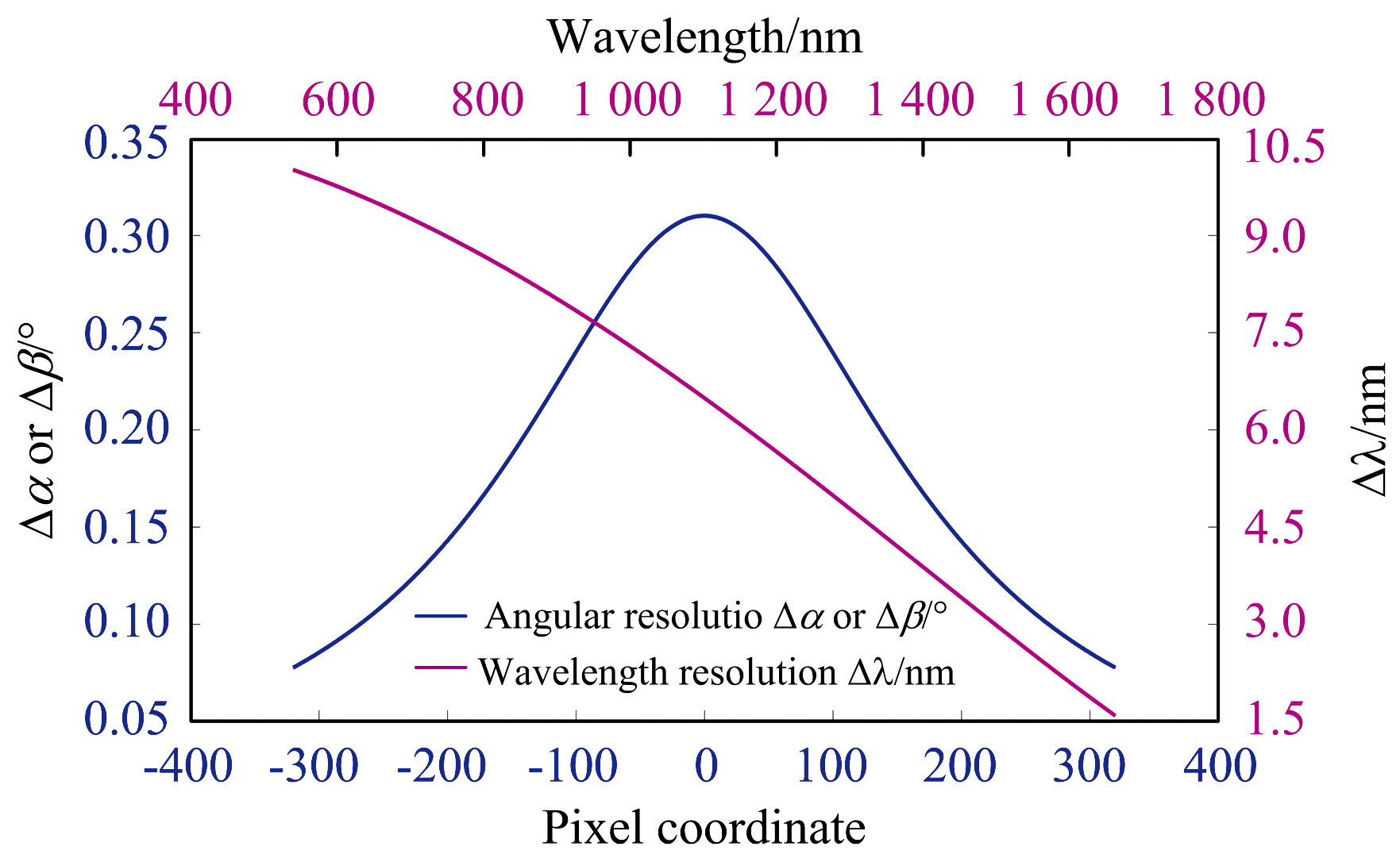
面阵探测器采用国惠光电生产的GH-VSW640-F15c宽波段焦平面探测器, 相应的光谱波段为400~1 700 nm, 像元尺寸Δ x=Δ y=15 μ m, 分辨率为640× 512, 结合激光告警相应波段(450~1 700 nm)和视场角(俯仰视场120° 、 方位视场96° )要求, 可求得宽波段镜头的等效焦距f=2.77 mm, 光栅常数d=2 μ m。 根据式(3)可得方位角分辨率Δ α 、 俯仰角分辨率Δ β 和波长分辨率Δ λ 为
根据上述焦平面探测器参数、 镜头焦距f、 光栅常数d, 代入式(5)可获得0级衍射光斑在焦平面探测器不同像素对应的角分辨率Δ α (或Δ β )如图5蓝色曲线所示(以面阵探测器的中心为像素0点位置), 450~1 700 nm光谱范围内不同波长对应的波长分辨率Δ λ 如图5红色曲线所示。 由图5可得该系统理论上来袭激光测量角分辨率Δ α ≤ 0.3° 、 Δ β ≤ 0.3° , 波长分辨率Δ λ ≤ 10 nm。
 | 图5 角分辨率和波长分辨率曲线Fig.5 Curve of angular resolution and wavelength resolution |
由于多参数激光告警系统光谱范围宽、 视场大, 而现有光学镜头无法满足450~1 700 nm宽光谱范围的消色差成像, 因此设计了专用可见近红外宽波段消色差镜头, 如图6所示, 其探测器对角线视场已达180° 。
 | 图6 大视场宽波段消色差激光告警镜头 (a): ZEMAX仿真镜头光路图; (b): 镜头实物; (c): 镜头调制传递函数(MTF)Fig.6 Large field of view and wide band achromatic laser warning lens (a): ZEMAX simulation light path diagram; (b): Lens; (c): Modulation transfer function of lens (MTF) |
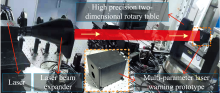
根据上述推导和分析, 搭建实验研究进行验证, 实验装置如图7所示。 由于大视场下镜头存在畸变, 导致无法直接采用式(2)获得来袭激光相对方位角α '和相对俯仰角β ', 需要通过大量实验数据拟合标定获得。
 | 图7 实验装置图Fig.7 Experimental device diagram |
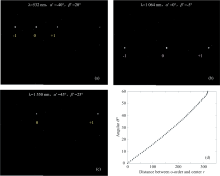
采用常用激光武器的三个波长(波长分别为532、 1 064和1 550 nm)激光进行实验, 将多参数激光告警样机放置在高精度二维旋转台(转台的角度精度为0.01° )实现不同角度入射, 波长分别为532、 1 064和1 550 nm激光实验获得的衍射光斑分布如图8(a, b, c)所示。 由于镜头成像是关于中心对称的, 结合图2坐标可知, 实验获得俯仰角β '=0° 时不同方位角α '与焦平面探测器0级光斑到探测器中心距离对应关系, 就是不同θ 角与0级光斑到探测器中心距离r的关系, 实验结果如图8(d)所示, 其中r=
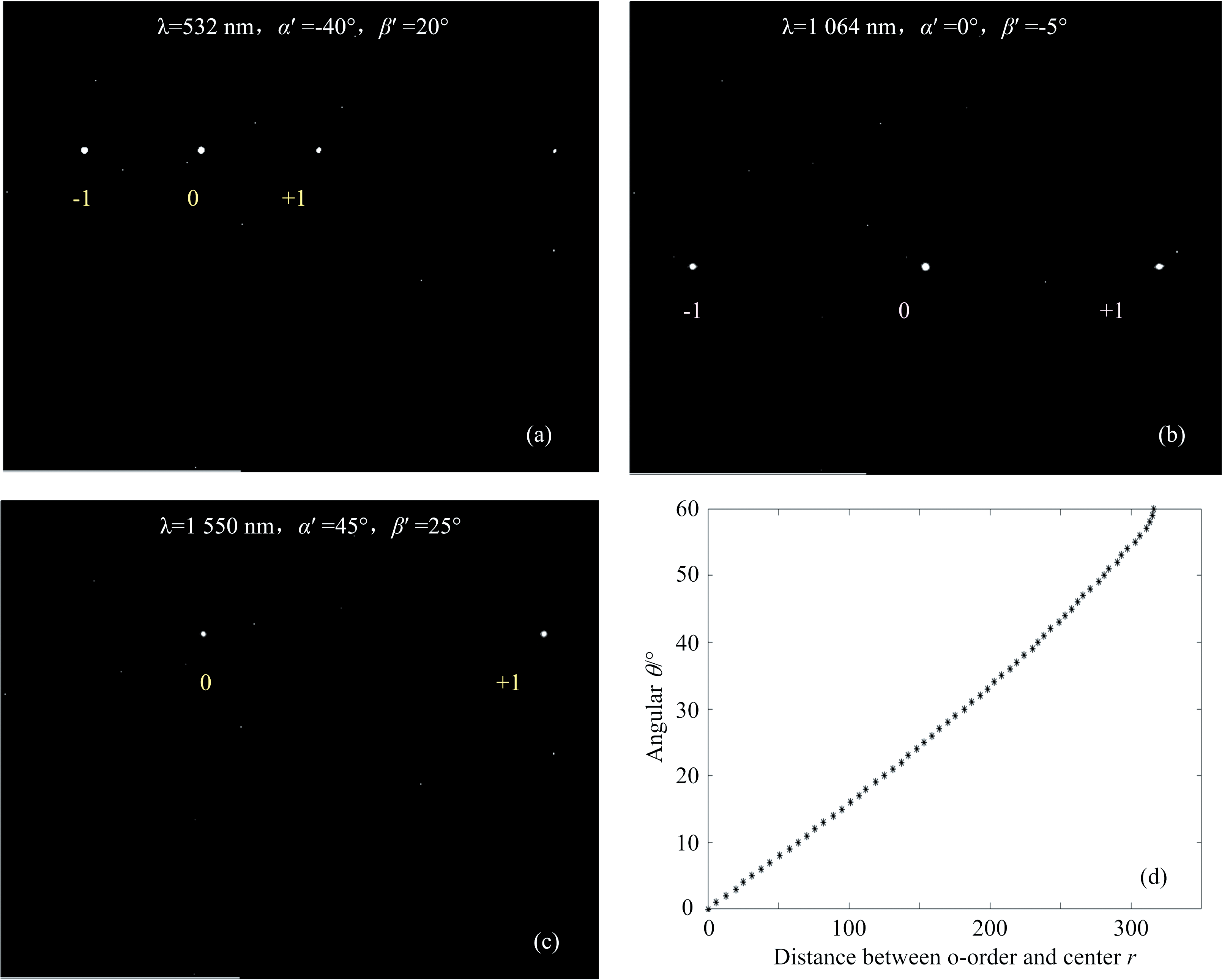 | 图8 不同波长、 不同角度探测器获得的衍射光斑及0级与中心距离r的关系 (a): λ =532 nm激光衍射光斑图; (b): λ =1 064 nm激光衍射光斑图; (c): λ =1 550 nm激光衍射光斑图; (d): 不同θ 角与0级光斑到探测器中心距离r的关系Fig.8 Diffraction patterns obtained by detectors with different wavelengths and angles, and distance r between diffraction order 0 and detector center (a): Laser diffraction spot @λ =532 nm; (b): Laser diffraction spot @λ =1 064 nm; (c): Laser diffraction spot @λ =1 550 nm |
由于镜头成像是关于中心对称的, 结合图2坐标及成像理论可知0级光斑中心坐标(x0, y0)可得相对方位角α '和相对俯仰角β '为
式(6)中, tanθ 通过图8(d)测得的实验数据可拟合获得, tanθ 与0级光斑中心坐标(x0, y0)拟合关系为
实验中针对常用的激光武器的三个波长(波长分别为532、 1 064和1 550 nm)激光不同角度、 不同脉宽进行实验分析, 为消除背景光对实验的影响, 设计加工的多带通窄带滤光片及其透过率如图9(a, b)所示, 加多带通窄带滤光片与不加滤光片对比实验结果如图9(c, d)所示, 可以看出不加多带通窄带滤光片会受到强复色光的干扰, 将无法实现准确测量, 加多带通窄带滤光片滤除强背景光影响, 提高光斑提取精度, 将提高系统告警精度, 降低虚警率和误警率。 通过实验采集光斑图像, 根据式(6)测得的实验结果及误差, 该系统方位角视场为120° 、 俯仰角视场为96° 、 角度测量精度< 1° 、 中心波长测量精度< 10 nm、 脉宽测量精度< 3 ns, 其中部分实验结果及误差如表1所示。
 | 图9 多带通窄带滤光片及透过率 (a): 滤光片实物; (b): 测得的滤光片光谱透过率; (c): 有多带通窄带滤光片测得的衍射图; (d): 无滤光片测得的衍射图Fig.9 Multiband narrowband filter and transmittance (a): Filter; (b): Measured spectral transmittance of filter; (c): Diffraction image measured with filter; (d): Diffraction image measured without filter |
| 表1 实验结果及误差 Table 1 Experimental results and errors |
针对现有激光告警无法同时实现大视场宽波段下的来袭激光绝对方位角、 绝对俯仰角、 激光波长、 激光脉冲宽度多参数高精度综合探测, 提出基于光栅衍射和三维电子罗盘的绝对方位角、 绝对俯仰角、 激光波长测量技术, 以及基于FPGA的激光脉宽测量技术, 并将其集合实现多参数综合告警。 该告警方法主要由激光脉冲宽度测量、 绝对角度及激光波长测量、 控制及数据处理电路三大部分组成, 其中脉冲宽度测量模块由光学镜头、 多带通窄带滤光片、 高速光电探测器组成, 实现来袭脉冲激光的高速光电转换, 通过FPGA实现脉宽测量; 绝对角度及激光波长测量模块由光栅、 大视场宽波段消色差镜头、 多带通窄带滤光片、 宽波段面阵探测器、 三维电子罗盘组成, 通过对一级和零级衍射光斑位置获得来袭激光波长、 相对方位角和相对俯仰角信息, 结合三维电子罗盘测得的方向角、 俯仰角以及横滚角, 进而获得来袭激光的三维绝对方位角和绝对俯仰角。 根据实际需要设置多带通窄带滤光片选通波段, 有效滤除背景光的影响, 降低系统虚警、 漏警。 对各参数测量进行理论推导, 并对光学系统进行了仿真设计, 搭建原理验证实验, 实验结果表明, 该多参数激光告警系统对角线视场可达180° 、 方位角视场为120° 、 俯仰角视场为96° 、 角度测量精度优于1° 、 中心波长测量精度优于10 nm、 脉宽测量精度优于3 ns。 该技术将为海、 陆、 空、 天领域对来袭激光的高精度多参数综合探测奠定基础, 并且可获得来袭激光的绝对方位信息, 有利于提高复杂战场的生存能力。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|