







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于激光雷达对一次沙尘过程臭氧和气溶胶垂直结构的协同观测
[王界1, 2, 3  , 刘文清
, 刘文清1, 2, 4 , 张天舒1 , 夏建东5 , 邓威5 , 胡文杰5 ]
, 刘文清|
|


作者简介: 王 界, 1986年生,安徽大学物质科学与信息技术研究院助理研究员 e-mail: jiewang@ahu.edu.cn
利用自主研制的四波长全固态激光雷达系统, 实现了大气臭氧和气溶胶的协同观测, 这也是该系统在国内的首次立体观测应用。 基于该雷达系统, 重点针对2021年4月中旬沙尘污染前、 中、 后三个阶段进行污染物的空间垂直分布特征进行分析, 发现臭氧的垂直分布主要集中在距地面1.5 km范围内, 沙尘前的臭氧浓度整体明显高于沙尘中和沙尘后。 沙尘前和沙尘中, 气溶胶的垂直分布高度可以达到2.5 km, 由于沙尘的突然入境, 会造成局地消光系数突变升高超过2.5 km-1, 沙尘过境后气溶胶主要积累在近地面500 m范围内。 通过激光雷达的连续观测和垂直廓线分析发现沙尘前, 在上午7时前后城市上空距地面300 m高度附近会出现臭氧浓度的低值区, 约13 μg·m-3, 不足附近范围的1/4, 这可能是在稳定大气环境中由日出前的“滴定效应”造成。 但是, 沙尘的突然输入不仅消除了该稳定的“滴定效应”, 而且还抹平了臭氧的日变化特征, 使得近地面的臭氧浓度峰谷值降为55 μg·m-3, 是沙尘前和沙尘后的0.44倍和0.46倍。 同时, 由于沙尘的输入, 细颗粒物质量浓度的占比降低至不足20%, 加之上游一次污染物输入, 进一步抑制了臭氧的生成和转化过程。
The cooperative observation of atmospheric ozone and aerosol is realized by using the self-developed four-wavelength solid-state lidar system, which is also the first three-dimensional observation application of the system in China. Based on the radar system, the spatial vertical distribution characteristics of pollutants before, during and after a dust episodein Mid-April 2021 were studied. We found that the vertical distribution of ozone was mainly concentrated within 1.5 km from the ground, and the ozone concentration before the dust was significantly higher than during and after dust. The vertical distribution of aerosol could reach the height of 2.5 km before and in the dust. Due to the sudden entry of dust, the local extinction coefficient will increase abruptly by more than 2.5 km-1. After the passage of sand dust, the aerosol was mainly suppressed within 500 m near the ground. Through the continuous observations and the vertical-profile analysis of lidar, it is found that before the dust, a region of low ozone concentration with a minimum concentration of 13 μg·m-3 near the height of 300 m around 7 a. m. was displayed, which is about 1/4 of the nearby region. This low ozone region may be caused by the “titration effect”before sunrise in a stable atmospheric environment. However, the sudden input of dust not only eliminated the stable “titration effect”but also erasesd the daily variation of ozone by reducing the peak-to-valley value of ozone concentration on the ground to 55 μg·m-3, which was 0.44 and 0.46 times that before and after dust respectively. Meanwhile, the input of dust, reduced the proportion of fine particle mass concentration to less than 20% and transported more primary pollutants from upstream, further inhibiting the generation and transformation of ozone.
气溶胶是影响全球辐射强迫的重要因子[1], 而沙尘是大气气溶胶的重要来源。 由于沙尘能够快速改变大气的热力状况和动力结构, 因此由沙尘所造成的气候效应尚无法完全确定[2, 3, 4]。 除了沙尘的气候效应外[5], 它也对区域的空气质量影响较大[6]。 目前, 已有较多的学者围绕沙尘的传输特征[7, 8]、 局地空气质量的影响[9, 10]、 垂直分布结构[11, 12]等开展大量的研究。 但是, 这些研究基本上聚焦于沙尘本身, 对沙尘天气中的臭氧和颗粒物的变化和评价目前做的还比较少。 由于臭氧和PM2.5的协同控制已成为我国当前大气污染的重点方向[13, 14], 对其形成机理、 影响因素和控制方案需要做深层次研究, 尤其在典型天气过程条件下, 更需要详细数据的支撑。 因此, 开展沙尘过程中的臭氧和颗粒物垂直分布协同观测, 对研究我国重点区域在沙尘影响下如何制定区域污染防控策略具有较强的指导意义。
当前, 为了支撑对臭氧和PM2.5的协同控制, 我国初步建成了完备的地面空气质量监测网络, 实现了城市、 乡村等不同区域内地面的臭氧和PM2.5在线连续观测[15]。 然而针对空间分布和传输规律, 缺乏臭氧和PM2.5的协同观测资料[16, 17, 18]。 本研究中基于自主研制的激光雷达系统, 经过参数与算法的优化, 实现了气溶胶和臭氧的同时间、 同空间观测, 并重点针对一次沙尘过境过程, 分析了沙尘过境前、 中、 后期气溶胶和臭氧的垂直分布规律, 发现沙尘对大气污染物的空间扰动特征, 初步探讨了将新型激光雷达应用于区域大气臭氧和颗粒物协同观测的可行性。
基于全固态大气臭氧激光雷达获取大气臭氧、 气溶胶垂直空间廓线。 大气臭氧激光雷达(CASEO-O3-Lidar)是由合肥中科环光技术有限公司研制生产。 该激光雷达采用了280、 295、 560和590 nm四个探测波长, 其中, 利用前两个波长基于差分吸收原理获取臭氧分布, 利用两个可见光波长基于米散射原理获取气溶胶空间分布。
不同于其他机制的臭氧激光雷达(例如基于惰性气体拉曼频移的技术[19]), 本系统采用全固态拉曼频移模块。 利用基频波长是1 064 nm的Nd∶YAG激光器倍频后获得波长为532 nm的优质光束, 该光束重复频率为1 kHz, 单脉冲能量接近14 mJ, 线宽小于0.5 nm, 脉冲宽度小于0.9 ns。 固态拉曼频移模块主要由非线性拉曼晶体(SrWO4)构成[20], 532 nm波长的光束通过该晶体后产生约921 cm-1的拉曼频移, 进而得到560和590 nm的激光波长, 这两个波长的单脉冲激光能量分别约3.3和4 mJ。 对560和590 nm的激光波长采用二倍频技术, 即可获得紫外波长280和295 nm的输出, 单脉冲能量分别约0.4和0.2 mJ, 激光发散角小于0.3 mrad。
激光雷达的接收系统采用Cassegrain型的望远镜对各个波长的回波信号接收。 该望远镜的直径200 mm, 接收视场角约1.5 mrad, 接收效率超过20%。 四个波长的后向散射光汇聚后通过小孔压制杂散光, 分别经过四个分束镜由四个光电倍增管(PMT, Hamamatsu R9800)进行弱信号探测, 信号经过20 MHz的数据采集后, 由计算机处理获取臭氧和气溶胶的垂直廓线分布。
该激光雷达系统的最小时间分辨率为3 s, 空间分辨率为7.5 m, 有效的测量距离为3 km。 在正常工作时, 为了提高数据的信噪比, 常采用重复信号累计叠加的方法, 一般设计的采样频率为5 kHz。 激光雷达结构原理如图1所示。
 | 图1 激光雷达系统结构原理Fig.1 Framework of the lidar system |
地面大气成分参数PM10、 PM2.5、 CO、 SO2、 NO2、 O3六项因子是由空气自动在线监测设备获取, 由赛默飞世尔中国公司生产研制, 并严格按照国家标准规范进行维护[21], 每天0时进行校零, 每周进行一次标准气体的校标, 每周进行一次跨度校准, 出现数据偏离大或者负值情况, 随时进行校准校标。 其中, PM10和PM2.5是基于振荡天平的方法, CO、 SO2、 NO2和O3是基于光学发光法, 数据来源于生态环境部官方发布结果。
本次实验中, 地面气象参数的监测是由自动气象监测仪获取。 该监测仪是中环天仪(天津)气象仪器有限公司生产研制。
1.3.1 臭氧激光雷达的臭氧反演方法
臭氧激光雷达系统工作时基于差分吸收原理[22]。 采用两个对臭氧吸收有明显区别的激光波长, 一个波长位于臭氧分子的强吸收区域(记作λon), 一个波长位于臭氧分子的弱吸收或无吸收区域(记作λoff), 按激光雷达的工作方式, 将两个波长对应的激光雷达方程联合求解得到如式(1)所示
其中,
式中: N(z)为距离z处大气臭氧分子的数密度, P(λi, z)为波长λi距离z处的激光回波信号, δ(λi, T)为波长λi温度T时的待测气体吸收截面。 BA、 EA、 EM和Eother分别为大气后向散射、 大气气溶胶消光、 大气分子消光和其他吸收气体吸收引起的修正项。
β(λi, z)为波长λi高度z处的大气(包括大气分子和气溶胶)体积后向散射系数。
1.3.2 臭氧激光雷达的气溶胶反演方法
如式(1), 在激光雷达进行臭氧浓度反演时, 基于差分吸收原理将气溶胶的消光系数作为抵消项在两个波长处扣除。 但对气溶胶消光系数反演时, 则是选取对气溶胶后向散射效应明显的波长进行探测和解析, 一般采用可见光(尤其是绿光)波长, 基于米散射的原理对雷达方程进行求解
式(6)中: P(z)为激光雷达接收到的光电子数, c是系统常数, P0是发射的激光脉冲能量, αm(z)和βm(z)分别为分子消光系数(km-1)和后向散射系数(km-1·Sr-1), αa(z)和βa(z)分别为气溶胶消光系数(km-1)和后向散射系数(km-1·Sr-1), z为高度。
求解方程(6)常用的方法有Collis算法[23]、 Klett算法[24]和Fernald算法[25]。 较Collis算法和Klett算法, Fernald算法是将空气分子和气溶胶粒子的消光分别考虑来求解激光雷达方程, 收敛性较好, 易获得气溶胶消光系数的解析解, 是激光雷达方程各种反演方法中最具有代表性的一种方法。 本文采用Fernald方法反演气溶胶的垂直消光系数廓线。 反演过程以及相关参数的设置可参考文献[26, 27]所述。
实验中, 观测点位设置在安阳市城区安阳市生态环境局附近(114.5°E, 36°N)。 激光雷达系统放置在地面, 观测角度设置为天顶方向。 空气质量监测数据采用安阳市所辖国控点的加权平均。 气象数据与激光雷达系统在同一地点观测。 详细的观测点位如图2所示。
 | 图2 观测站点位Fig.2 Location of observation station |
2021年4月中旬中国北方经历了一次较为强烈的沙尘暴。 国家气象局发布预报4月15日08时至16日08时, 新疆东部和南疆盆地、 青海西北部, 甘肃中西部、 内蒙古中西部、 宁夏、 陕西中北部、 山西、 北京、 天津、 河北、 河南、 山东中西部、 安徽中北部、 江苏北部等地将出现扬沙或浮尘天气, 内蒙古中西部部分地区有沙尘暴。 此次沙尘过程上游的沙尘含量约为3000微克每立方米。 根据沙尘过境观测点位的强度和时间, 将此次沙尘过程分为: 过程Ⅰ, 沙前过程(before dust), 对应的时间为2021年4月14日0时至15日18时; 过程Ⅱ, 沙中过程(dust), 对应的时间为2021年4月15日20时至16日20时; 过程Ⅲ, 沙后过程(after dust), 对应的时间为2021年4月17日12时至4月19日0时。 详细定义如表1所示。
| 表1 2021年4月沙尘过程(15日—19日)定义 Table 1 Definition of different periods of this study |
2.3.1 地面颗粒物质量浓度观测结果
过程Ⅰ: 2021年4月14日0时至15日18时, 观测站点PM10和PM2.5的浓度值较稳定, 最大值分别为143和80 μg·m-3, 最小值分别为63和18 μg·m-3, 平均值分别为(99.4± 20.6)和(50.8± 20.8) μg·m-3。 在这个过程中, PM2.5/PM10的日变化明显, 呈现上午单峰的特征, 经统计过程Ⅰ中, PM2.5/PM10的平均值为0.50± 0.18。 在这个过程中, 安阳市存在一定颗粒物污染, 但总体污染程度较轻, 受粗细粒子共同作用。
 | 图3 地面颗粒物质量浓度观测结果Fig.3 Results of ground particle mass concentration |
过程Ⅱ: 2021年4月15日20时至16日20时, 这个过程中沙尘全面入侵安阳市, 4月15日18时, PM10质量浓度为129 μg·m-3。 19时, PM10质量浓度为329 μg·m-3。 20时, PM10质量浓度达到830 μg·m-3, 颗粒物浓度短时累积突变上升, 3个小时内增长了5倍。 在这个过程中, PM10和PM2.5的最大值分别为830和169 μg·m-3。 最小值分别为390和67 μg·m-3。 平均值分别为(653± 119.5)和(118.24± 23.43) μg·m-3, 分别是过程Ⅰ的6.57倍和2.33倍。 沙尘过境过程中, 由于粗粒子的大量增加, 降低了PM2.5/PM10的比值, 平均值为0.19± 0.04, 不足过程Ⅰ的1/4。
过程Ⅲ: 2021年4月17日12时至4月19日0时, 该过程的时间段选取主要基于以下两个方面考虑。 (1) 沙尘入境时粗细粒子浓度升高非常快, 但是沙尘离境后存在一个“渐变”过程, 考虑到沙团主体完全离开的影响, 因此起始时刻选在粗粒子浓度降至正常值后12 h。 (2) 由于沙团主体离境后, 经过一段时间的完全沉降, 观测站点的大气质量回归至正常, 为研究沙尘过后的大气臭氧污染变化过程, 选取的时间跨度又不能太长, 因此, 截止时间定在19日0时, 保证有一个完整的日变化过程。 基于上述的考虑, 在这个过程中经统计发现, PM10的浓度水平基本上回归至正常水平, 但PM2.5的浓度水平却回落到过程Ⅰ的水平之下。 二者最大值分别为184和47 μg·m-3。 最小值分别为32和12 μg·m-3。 平均值分别为(96.4± 40.5)和(28.2± 10.7) μg·m-3。 PM2.5/PM10的比值均值为0.31± 0.09。
通过沙尘过境前中后三个过程的分析, 初步发现沙尘过境前对地面颗粒态的污染物扰动较小。 由于沙尘的入境会造成地面颗粒态污染物的突变和急剧增加, 同时由于粗颗粒的大量输入, 造成细粒子质量浓度的占比迅速降低, 改变稳定的大气污染状态。 随着沙尘的离境, 粗颗粒裹挟细颗粒快速沉降, 导致细颗粒物质量浓度降到过境前的稳定状态之下。 从地面风速的观测结果发现, 北风或西北风向助推了沙尘的输入, 在过程Ⅰ和Ⅱ交界时, 地面风速超过5 m·s-1, 同时发现在过程Ⅱ过程中地面粗细粒子浓度有短时下降, 此时对应的地面风向以南风为主, 可能主要受地面的湍流或局部的气流影响较大。
2.3.2 地面大气成分观测结果
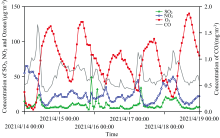
对三个过程中的地面气态污染物实时观测结果如图4所示。 对四种气态污染物进行统计分析, 发现除SO2在过程Ⅱ中有较明显的升高外, NO2、 CO和O3三种污染物在过程Ⅱ中的平均浓度均低于过程Ⅰ和过程Ⅲ。 SO2在过程Ⅱ中还明显出现了最大值为49 μg·m-3的情况, 几乎是过程Ⅰ和过程Ⅲ的最大值的2倍。 NO2和O3的变化和强度几乎相当, 在过程Ⅰ中的最大值分别为65和128 μg·m-3, 在过程Ⅲ中的最大值分别为50和140 μg·m-3, 而在过程Ⅱ中几乎被沙尘抑制1/2, 最大值分别为35和95 μg·m-3。 观测还发现, NO2和O3在过程Ⅱ中的最低值也远高于过程Ⅰ和过程Ⅲ, 其中过程Ⅱ中二者最小值分别为14和40 μg·m-3, 过程Ⅰ二者的最小值分别为9和3 μg·m-3, 过程Ⅲ二者最小值分别为8和21 μg·m-3。 CO在过程Ⅱ和过程Ⅲ的变化不大, 基本上是过程Ⅰ(1.66 mg·m-3)的一半。
 | 图4 地面气态污染物分析Fig.4 Continuous results of ground gaseous pollutants |
通过地面气态污染物的观测分析说明由于沙尘的输入, 带来了较多上游的一次污染物输入, 较大程度地抑制了本地二次污染物的生成和转化。 NO2和O3浓度在过程Ⅱ中峰谷差大幅减小, 说明由于沙尘粗颗粒物占比较大, 抑制了臭氧的生成和转化过程, 对稳定的大气氧化过程产生扰动, 使O3在日变化过程中不再削减殆尽。
2.3.3 地面气象条件分析
地面温度和相对湿度的观测结果如图5所示。 分析结果发现, 在沙尘过境前、 中、 后三个过程中观测站点的地面温度变化不太明显, 但是相对湿度在过程Ⅱ中却明显低于过程Ⅰ和过程Ⅲ。 过程Ⅱ中, 相对湿度的最大值不足40%, 但过程Ⅰ和过程Ⅲ中的相对湿度最大值分别接近80%和65%, 三个过程中相对湿度的最小值在6%~9%。 这表明较低的相对湿度对颗粒物质量浓度的累积和二次污染的抑制影响较大。
 | 图5 地面气象条件观测结果Fig.5 Results of surface meteorological conditions |
2.4.1 大气臭氧时空分布特征
采用激光雷达获取的大气臭氧浓度垂直分布如图6所示。 由于雷达工作状态原因, 观测数据取用2021年4月14日12时至4月19日0时, 三个过程的标识也如图6所示。 观测发现, 安阳地区的臭氧垂直分布主要集中在距地面1.5 km范围内, 过程Ⅰ的臭氧浓度整体高于过程Ⅱ和过程Ⅲ。 过程Ⅰ中, 臭氧主要集中在距地面1 km以内, 4月14日下午在500 m左右的高度出现峰值, 峰值浓度接近90 μg·m-3。 在4月15日凌晨和上午, 在距地面300 m高度附近, 出现臭氧浓度的低值区, 这可能是由于在稳定大气环境中日出前近地面的“滴定效应”造成。 4月15日下午和4月14日的下午, 臭氧空间分布特征类似, 垂直1 km范围内相对均匀, 浓度值接近80 μg·m-3。 过程Ⅱ中, 整体臭氧浓度较低, 臭氧垂直空间分布不足900 m, 浓度不超过45 μg·m-3, 过程Ⅱ较过程Ⅰ, 日变化不明显, 也没有出现凌晨和上午的“滴定效应”, 说明沙尘过程对臭氧的抑制效应明显。 在过程Ⅲ中, 随着大气稳定性增强、 颗粒物沉降完成, 观测站点上空的臭氧浓度又逐渐积累, 4月17日—18日, 臭氧浓度空间日变化比较明显, 基本上回归到过程Ⅰ的状态。 其中, 臭氧峰值出现在4月18日下午200~400 m高度范围内, 浓度值接近100 μg·m-3。 4月17日—18日臭氧浓度分布高度超过1.3 km。 较过程Ⅰ, 过程Ⅲ的凌晨和上午也未出现明显的“滴定效应”, 有可能沙尘对本地大气氧化性的扰动驰豫时间较长, 局地大气尚未恢复到稳定状态。 详细的日变化对比和“滴定”过程对比见后文分析。
 | 图6 大气臭氧浓度垂直分布Fig.6 Vertical distribution of ozone concentration |
2.4.2 气溶胶时空分布特征
采用激光雷达同步获取了大气气溶胶垂直分布, 如图7所示。 结果中发现, 与地面的颗粒物质量浓度特征有明显的不同。 过程Ⅰ和过程Ⅱ, 气溶胶的垂直分布高度可以达到2.5 km。 过程Ⅰ中, 4月15日凌晨出现了前后约6 h的气溶胶高值时段, 该时段内气溶胶均匀地分布在2 km范围内, 最大消光系数接近2.5 km-1, 过程Ⅰ中近地面气溶胶均匀分布在500 m范围内, 平均消光系数超过1 km-1。 4月15日下午气溶胶分布短时减少后, 随沙尘的突然入境, 在站点上空2.3 km垂直范围内又继续出现气溶胶的强分布, 平均消光系数超过2.8 km-1, 说明过境沙团既均匀, 强度还大。 在过程Ⅱ的后期, 4月16日中午前后, 高空沙尘的强度分布减弱, 地面的强度增加。 近地面的消光系数约1.5 km-1。 随着沙尘离境, 在4月16日19时前后, 过程Ⅱ高空的沙尘突然减少消失, 地面的气溶胶累积程度也相应减弱, 平均消光系数不足0.8 km-1。 在过程Ⅲ中, 气溶胶主要分布在500 m以内, 最大消光系数约1.0 km-1。 4月18日, 大气边界层的结构较为清晰, 日变化明显, 凌晨上午时段边界层高度不足250 m, 正午12时左右, 边界层接近500 m。 边界层高度的增大, 也有利于近地面颗粒物质量浓度的进一步降低。 过程Ⅲ的高空1 km附近出现较多的消光系数不足0.3 km-1的气溶胶分布, 这可能是受到沙尘过境后高空的浮尘粒子影响。
 | 图7 大气气溶胶消光系数垂直分布Fig.7 Vertical distribution of aerosol extinction coefficients |
2.4.3 沙尘前后臭氧与气溶胶的日变化特征分析
为进一步分析沙尘过境的影响, 针对臭氧和气溶胶, 分别过程Ⅰ、 Ⅱ和Ⅲ中选取垂直廓线进行分析, 如图8所示, 其中, (a)、 (b)分别为臭氧和气溶胶凌晨的垂直廓线, (c)、 (d)分别为臭氧和气溶胶午间的垂直廓线。 臭氧廓线的高度范围选择为0.3~1.0 km, 气溶胶的高度范围选择为0.3~1.3 km。
 | 图8 沙尘过程前后臭氧与气溶胶的日变化特征 (a), (b)分别为臭氧和气溶胶凌晨的垂直廓线; (c), (d)分别为臭氧和气溶胶午间的垂直廓线Fig.8 Diurnal variation of ozone and aerosol before and after dust process (a), (b): Vertical profiles of ozone and aerosols at dawn; (c), (d): Vertical profiles of ozone and aerosols at noon |
结果发现, 无论是凌晨或午间, 过程Ⅱ的臭氧浓度均低于过程Ⅰ和Ⅲ。 如图8(a)所示, 凌晨时段, 过程Ⅰ和过程Ⅱ的地面臭氧浓度接近, 但过程Ⅱ臭氧浓度呈指数快速衰减, 在900 m高度处过程Ⅰ和Ⅱ的臭氧浓度差值超过50 μg·m-3。 过程Ⅰ和过程Ⅲ的垂直结构较为相似, 但650 m以下, 过程Ⅲ的臭氧浓度高于过程Ⅰ大约8 μg·m-3。 650 m以上, 过程Ⅰ的臭氧浓度高于过程Ⅲ约5 μg·m-3。 如图8(c)所示, 显示了午间时段臭氧在三个过程中的垂直变化, 分析发现三个过程在午间时段臭氧的垂直结构变化特征几乎一致。 但强度上, 过程Ⅰ最大, 高于过程Ⅲ平均约5 μg·m-3。 过程Ⅱ最低, 低于过程Ⅲ平均约25 μg·m-3。 凌晨时段的气溶胶垂直结构与臭氧明显不同。 如图8(b)所示, 过程Ⅰ和过程Ⅱ的气溶胶消光系数基本上呈现出地面较高, 随高度的增加逐渐减小, 700 m后消光系数又逐渐增大的规律。 过程Ⅰ与过程Ⅱ不同的在于, 过程Ⅰ近地面的消光系数接近2 km-1, 500~900 m之间出现较多的气溶胶精细结构, 而过程Ⅱ近地面消光系数接近1.75 km-1, 高空无精细结构。 过程Ⅲ的消光系数明显低于过程Ⅰ和Ⅱ, 近地面消光系数约1.0 km-1, 并且随高度迅速递减, 在1.3 km高度处气溶胶的消光系数仅0.3 km-1。 这说明, 观测点位近地面的颗粒物无论是沙尘前、 中、 后均有较强的积累, 沙尘入境前、 中对高空的颗粒物影响较大, 沙尘团大规模快速过境消除了稳定大气中颗粒物分布的不均匀性。 午间时段, 三个过程中的气溶胶垂直分布呈现较为一致的规律, 消光系数从地面至高空快速减小, 强度上过程Ⅱ高于过程Ⅰ, 过程Ⅲ的消光系数最低, 说明沙尘离境后午间时段边界层的提升进一步降低了颗粒物的垂直分布。
2.4.4 沙尘前后臭氧空间滴定特征分析
利用激光雷达观测臭氧和颗粒物过程中, 经常发现在上午7时左右, 高空中存在较为明显的臭氧低值区, 该低值区在这里称为“滴定区域”。 此次沙尘传输前后, “滴定区域”有明显的变化, 如图9(a)所示。 过程Ⅰ中, 近地面臭氧浓度约30 μg·m-3, 随高度的增加臭氧浓度快速降低, 至300 m高度处, 臭氧浓度降至13 μg·m-3, 随后随高度的增加臭氧浓度快速增加, 至495 m高度处臭氧浓度增至56.6 μg·m-3。 而过程Ⅲ, 沙尘离境后, 大气恢复稳定状态, 该现象再次出现, 但是臭氧浓度的极小值出现在230m处, 浓度为27.3 μg·m-3, 相较过程Ⅰ, 最小值出现的高度降低, 浓度增大。 在过程Ⅱ中, 该现象几乎完全消失, 臭氧从地面至300 m高度范围内几乎维持35 μg·m-3不变, 在350 m左右出现极大值后随高度增加而快速降低。
 | 图9 “滴定效应”过程Fig.9 “Titration effect”process |
对同时段的气溶胶观测发现并没有类似臭氧的“滴定区域”, 无论是过程Ⅰ、 Ⅱ或Ⅲ, 气溶胶的分布规律较为一致, 从地面至200m附近, 消光系数逐渐增大, 自200 m后随高度消光系数逐渐减小。 对比臭氧该时段特征规律, 说明在稳定大气中臭氧的“滴定区域”可能受到非颗粒物的影响, 这个问题值得进一步深入研究。
自主研制了一套四波长全固态激光雷达系统, 通过系统参数和反演算法的优化, 实现了大气臭氧和气溶胶垂直空间分布的协同观测, 改善了传统臭氧差分激光雷达或传统米散射气溶胶激光雷达的不足, 有助于支撑我国重点区域臭氧和PM2.5的协同控制。
基于该激光雷达系统, 重点对一次沙尘污染过程进行立体探测, 获取了沙尘过境前、 中、 后期大气中臭氧和颗粒物的垂直分布结构特征。 观测发现臭氧垂直分布主要集中在距地面1.5 km范围内, 沙尘前和沙尘中, 气溶胶的垂直分布高度可以达到2.5 km。 沙尘前的臭氧浓度整体高于沙尘中和沙尘后。 由于沙尘的突然入境, 造成观测站点高空和局地消光系数突变、 升高, 甚至超过2.5 km-1, 对地面的污染影响较大。 通过廓线特征分析发现, 在上午7时左右, 距地面300 m高度附近出现臭氧浓度的低值区, 这可能是由于在稳定大气环境中日出前近地面的“滴定效应”造成。 但是由于沙尘的输入, 不仅消除了稳定大气中臭氧的“滴定区域”, 而且还抹平了臭氧的日变化特征。 由于沙尘的输入, 细粒子质量浓度的占比降低至不足20%, 加上输送较多的上游一次污染物, 局地臭氧的生成和转化过程受到了较大程度地抑制。 通过此次观测, 系统性地验证了自主研发的新型激光雷达系统, 较好地支撑了臭氧和颗粒物的协同观测, 下一步, 将重点围绕两个方面工作进行, 一方面将采用系留气球、 高塔等手段对激光雷达系统进行全方位的质量控制研究, 进一步提升数据的精准度; 另一方面将针对区域大气臭氧污染的机理、 来源和去除等进行精细化研究, 进一步支撑我国大气污染防治。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
|