





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于相关度的白光干涉信号解调算法
[张振清1, 2  , 董丽娟
, 董丽娟2, * , 孙勇3 ]
, 董丽娟, 孙勇|
|


作者简介: 张振清, 1980年生, 铁道警察学院刑事科学技术系副教授 e-mail: zhangzhenqing1980@163.com
超精密的微纳器件是制造领域的核心器件, 随着超精密加工技术的迅猛发展, 对相应的微纳检测技术要求越来越高。 微纳检测技术是保证超精密加工技术精确稳定的重要手段, 是超精密加工技术进一步发展的前提。 现有的微纳器件表面轮廓检测方法按是否使用光学原理可以分为光学类和非光学类, 非光学类检测通常为点扫描、 接触检测的方式, 检测效率低, 容易破坏待测器件的表面形貌。 光学类的检测方式多为面扫描, 非接触式测量, 不会划伤待测器件, 检测效率高。 在光学检测中, 白光干涉技术由于其相干长度短的特点, 可实现微纳器件三维形貌的高精度测量, 受到国内外研究人员的广泛关注。 在白光干涉检测技术中, 信号解调算法对整个检测系统至关重要, 传统的白光干涉信号解调算法只采用了干涉信号的部分信息, 解调精度较低, 而高精度的相移解调算法又依赖于粗定位的精度, 无法直接实现高精度的三维形貌恢复。 为了解决以上问题, 提出以相关度为基础的信号解调算法, 该算法通过三级滑动窗口计算相关度, 利用了白光干涉信号的全部信息, 无需粗定位, 就可直接确定待测物体的表面三维形貌信息。 为验证该算法的性能, 对其进行了模拟仿真和实验验证。 模拟仿真结果表明该方法具有可行性, 可准确恢复仿真待测三维结构形貌, 采用三级滑动窗的设置可有效提高运算效率。 同时, 搭建了白光干涉垂直扫描实验系统, 并对光栅结构和微透镜结构进行了测量, 将实验结果与传统的重心法和相移法进行了比较。 实验结果表明该方法能准确恢复出不同物体的三维形貌, 精度及鲁棒性均优于改进的重心法, 接近相移法, 光栅高度的恢复结果表明该方法与相移法的误差小于0.5 nm。 仿真和实验结果表明, 所提出的基于相关度的白光干涉信号解调方法是可行的, 无需粗定位便可实现待测物体表面三维形貌的高精度恢复, 具有高精度、 高鲁棒性的特点。
Ultra precision micro nano devices are the core devices in the manufacturing field. With the rapid development of ultra-precision machining technology, the corresponding micro nano detection technology is required to be higher and higher. Micro nano measurement technology is an important means to ensure the accuracy and stability of ultra-precision machining technology and is the premise for further development. The surface profile detection methods for micro/nanodevices can be divided into optical and non-optical types according to whether optical principles are used. Non-optical detection usually adopts point scanning and contact detection, which is inefficient and easy to damages the surface morphology of the device to be tested. Optical detection methods are mostly surface scanning, and non-contact measurement, which will not scratch the device to be tested, and the detection efficiency is high. In optical detection, white light interferometry has been widely concerned by researchers at home and abroad because of its short coherence length, which can achieve high-precision measurement of three-dimensional morphology of micro-nano devices. In white light interference detection technology, the signal demodulation algorithm is very important to the entire detection system. Traditional white light interference signal demodulation algorithm only uses part of the information of the interference signal, which has low demodulation accuracy. However, high-precision phase shift demodulation algorithm depends on the accuracy of rough positioning, which cannot directly achieve the high-precision three-dimensional shape recovery. In order to solve the above problems, this paper proposes a signal demodulation algorithm based on the correlation. This algorithm calculates the correlation through a three-level sliding window and uses all the white light interference signal information. Without rough positioning, it can directly determine the three-dimensional surface topography information of the object to be measured. In order to verify the performance of the algorithm, this paper has carried out simulation and experimental verification. The simulation results show that the method is feasible and can accurately restore the 3D structure morphology to be measured. The setting of a three-stage sliding window can effectively improve the calculation efficiency. At the same time, the white light interference vertical scanning experimental system is built, and the grating structure and microlens structure are measured. The experimental results are compared with the traditional gravity center and phase shift methods. The experimental results show that this method can accurately restore the three-dimensional topography of different objects, and its accuracy and robustness are better than the improved barycenter method, which is close to the phase-shifting method. The grating height recovery results show that the error between this and phase-shifting methods is less than 0.5 nm. The simulation and experimental results show that the white light interference signal demodulation method based on the correlation proposed in this paper is feasible. It can achieve high-precision recovery of the three-dimensional surface topography of the object to be measured without rough positioning and has the characteristics of high precision and high robustness.
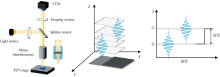
白光干涉仪利用宽光谱光源产生干涉条纹, 其干涉条纹具有空间范围小、 级次明显、 相干长度短、 对光程差的变化十分敏感等特性, 可以实现较高的纵向分辨率, 且避免了单色光的级次不明显, 相位模糊等问题, 在微纳检测领域具有很大的潜力, 受到国内外研究人员的广泛关注[1, 2, 3, 4, 5]。 白光干涉仪的基本原理如图1所示, 光源发出的光经物体表面反射后与干涉物镜内部的参考光发生干涉, 形成白光干涉条纹。 白光干涉条纹的强度与光程差有关, 在零光程差点时, 白光干涉条纹的光强最强。 根据此特性, 白光干涉仪在检测过程中, 首先需要纵向扫描待测物体获取一系列白光干涉图像, 然后将其堆叠起来组成三维数组, 纵向提取每个像素点的白光干涉信号, 通过白光干涉信号解调算法找到干涉信号零光程差点的相对位置信息, 最后将每个像素点的相对位置信息结合到一起, 获得待测物体表面的三维形貌信息。
 | 图1 白光干涉检测原理示意图Fig.1 Schematic diagram of white light interference detection principle |
在白光干涉检测系统中, 白光干涉信号解调算法十分关键, 其性能直接决定了整套系统的检测精度与检测效率, 是该领域的热门研究方向。 基于白光干涉的物体表面三维形貌恢复算法有很多, 形貌恢复算法的本质是要精确的定位每个像素点光强最大, 也就是零光程差点的纵向位置。 目前主要的方法包括极值法、 重心法、 傅里叶变换法、 空间频域法和相移法等[6, 7, 8, 9, 10, 11], 其中应用最广泛、 精度最高的为相移法。 白光干涉相移法利用零级条纹附近的几个点计算相位信息, 同时利用光强信息和相位信息进行定位, 所以具有较高的精度, 但其首先需要精确粗定位, 不能直接计算出零光程差点的位置。
目前的白光干涉信号解调算法大多采用了白光干涉信号的部分信息, 精度较低, 而相移法又依赖于粗定位精度, 不能直接计算出高度信息。 为了解决以上问题, 本文提出基于相关度的白光干涉信号解调方法, 该方法利用参考信号与实验信号之间的相关度信息进行相对定位, 恢复待测物体的表面高度信息。 该方法使用了白光干涉信号的全部信息, 可实现较高的精度, 同时不依赖于粗定位, 可直接计算出零光程差点的位置。
由光学的基本干涉原理可知, 要形成稳定的干涉条纹, 必须满足相干条件, 此时干涉光强值I(x)可以表示为
式(1)中, x为干涉区域垂直坐标; I1和I2分别为测量光强和参考光强; Re[R(τ d)]是白光光源相干函数的实部; τ d为两束光到达CCD的时间差。 τ d表示为
式(2)中, c为光的传播速度(真空), h0为参考板与分光板之间的距离。
白光干涉技术采用的光源为宽光谱光源, 当宽光谱光源在发生干涉时, 相当于多个单色光干涉条纹的组合叠加, 其光谱分布可用高斯函数表示。 因此, 其宽光谱分布为
式(3)中, ν 为光谱大小, Δ ν 为高斯光谱高度的一半, ν 0为光谱的中心频率。
由维纳-辛钦定理可知, 归一化后, 光谱傅里叶变换之后的干涉方程可表示为
式(4)中, τ 为空间坐标, 分光器为理想状态, 即通过分光器的两束光光强相等, 则可得宽光谱干涉强度为
式(5)中, z和z0分别为测量臂和参考臂的长度, lc为白光干涉的相干长度, λ 0为白光光源的中心波长。 由此可知白光干涉条纹的周期与中心波长λ 0有关, 由系统本身决定, 与检测对象无关。
目前定位零光程差点的方法可分为两种: 最初在单色干涉中引入的相位法和依赖于白光干涉信号频谱特性的相关图包络评估法。 包络评估方法的精度较低, 相移法依赖于粗定位精度, 而且这两种方法都只使用了白光干涉信号中包含的部分信息[12, 13]。 而从理论上讲, 使用更多的信息可以获得更高的精度以及较强的噪声鲁棒性[14, 15]。 因此, 本文提出通过计算参考信号与待测信号的相关度, 找到每个像素点相关度最大的位置, 进而恢复三维形貌。 该方法利用了白光干涉信号的全部信息, 且避免了粗定位, 可直接实现高精度的测量。
如图2所示, 要进行相关度的计算, 首先要提取待测物体表面噪声较小的点作为参考信号, 利用上述物理模型, 拟合得到参考信号的数学表达式, 拟合式可表示为
式(6)中, F(z)为参考信号, A为背景光强, B、 C、 D、 E分别代表白光干涉信号的待测参数, 它们受材料以及系统相关参数的影响。 在拟合得到参考信号后, 使用最小二乘法衡量参考信号与实际信号的相关性, 其表达式如式(7)
式(7)中, W(Z)为使用“ 滑动窗” 进行计算, 作用是将计算的区域限制在白光干涉级次明显的部分, 以提高运算的效率以及准确性, I(Z)为实验获取的信号, F(Z)为参考信号。 由式可知, 当参考信号与实验信号完全相同时, 最小二乘法χ 2(Z)等于零, 而当参考信号与实验信号出现偏差时, χ 2(Z)迅速变大。 利用此特性, 可将相关度定义为
由式(8)可知, 当两个信号完全一致时, 相关度最高为1。
 | 图2 特征信号示意图Fig.2 Schematic diagram of characteristic signal |
本文利用MATLAB曲线拟合工具箱拟合出表达式中的各个参数, 得到参考光强信号的函数表达式, 拟合后的信号如图3所示。 同时为了减小计算量, 利用多级滑动窗提高系统的工作效率。 在第一级滑动窗口中, 粗定位白光干涉信号中条纹级次较明显的区域, 将滑动窗的步距设置为扫描步距50 nm, 滑动窗的工作区域为整个实验信号的区域。 在第二级滑动窗口中, 准确定位出零光程差点所在的条纹的位置, 滑动步距为5 nm, 工作区域为左次一级条纹到右次一级条纹之间。 在第三级滑动窗口中进行精确定位, 第三级窗口的滑动步距为1 nm, 工作区域在第二级定位的基础上, 零光程差点为中心的10 nm。
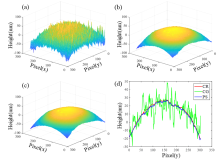
本文的仿真结构为MATLAB自带的“ peaks” 结构, 其三维结构如图4(a)所示, 设定系统扫描步距为50 nm, 采集的图像帧数为200幅, 扫描范围为0~10 μ m。 同时为了能够更好地模拟真实情况, 在其中加入了两种随机干扰信号, 一种是模拟外界光强干扰, 在白光干涉信号中加入的随机噪声信号, 另一种是模拟压电陶瓷位移误差以及系统振动等因素, 在扫描过程的位移量中加入随机噪声信号, 噪声大小为信号大小的5%。 分别使用二级、 三级滑动窗恢复其三维形貌, 恢复结果如图4。
 | 图3 拟合后的连续参考信号Fig.3 Continuous reference signal after fitting |
 | 图4 (a)“ peaks” 待测结构; (b)仿真结果剖面图Fig.4 (a) “ Peaks” structure to be tested; (b) Simulation result profile |
以上结果表明相关算法可以恢复待测物体的表面三维形貌, 与二级滑动窗相比, 采用三级滑动窗的设置恢复出的图像接近原始形貌, 精度可以达到2 nm, 为了平衡效率与精度, 采用三级滑动窗的设置。 相关算法的主要流程如图5所示。
 | 图5 相关算法流程图Fig.5 Correlation algorithm flow chart |
根据实验原理图搭建了如图6所示的白光干涉垂直扫描系统, 该系统的主要器件包括宽光谱白光光源、 干涉物镜、CCD相机、 压电陶瓷微位移台以及相关机械加工件。 其中宽光谱白光光源由卤素灯和滤波片组成, 光源光谱的中心波长为575 nm左右; 干涉物镜选用Nikon Mirau型干涉物镜, 放大倍数为20× , 数值孔径为0.40; CCD相机型号为Basler acA2040-55 μ m型相机, 相机靶面大小为2 048× 1 536个像素点, 单个像素点大小为3.45 μ m× 3.45 μ m; 压电陶瓷微位移台采用德国PI公司生产的P-528型压电陶瓷微位移台, 纵向定位重复性小于10 nm。
 | 图6 白光干涉检测系统实验平台Fig.6 White light interference measurement system |
本次实验共测试了光栅和微透镜两种物体, 系统的扫描步距设置为50 nm, 纵向扫描距离为10 μ m。 光栅物体的实验结果如图7所示, 分别使用了改进的重心法、 相移法和相关法对实验数据进行处理。 从图7(a)可以看出, 改进的重心法未能成功恢复光栅的表面三维形貌, 其结果表面扭曲且光栅高度误差较大。 而相移法和相关法均成功恢复了光栅的表面三维形貌, 光栅高度分别为75.8和76.2 nm, 误差小于0.5 nm, 表明相关算法具有可行性, 其性能优于改进的重心法, 精度接近相移法[16, 17, 18]。
 | 图7 (a)改进的重心法恢复结果; (b)相移法恢复结果; (c)相关算法恢复结果; (d) X=150时恢复结果截面图 CR: 相关算法; CG: 改进的重心法; PS: 相移法Fig.7 (a) Improved center of gravity method recovery results; (b) Phase shift method recovery results; (c) Correlation algorithm recovery results; (d) Cross section of recovery results at X=150 CR: Correlation algorithm; CG: Improved center of gravity method; PS: Phase shift method |
为了进一步验证本方法的可行性, 对微透镜结构进行了检测, 微透镜为塑料材质, 与光栅相比, 表面更加粗糙, 背景噪声更强。 测试结果如图8所示, 改进的重心法受噪声影响, 恢复结果的毛刺现象严重, 不能准确反映待测物体的表面特征。 与此同时, 相移法与相关法恢复结果表现出强烈的一致性。 说明本文提出的相关算法具有鲁棒性和可行性, 可以恢复不同结构、 材质器件的表面三维形貌。
 | 图8 (a)改进的重心法恢复结果; (b)相移法恢复结果; (c)相关算法恢复结果; (d) X=150时恢复结果截面图 CR: 相关算法; CG: 改进的重心法; PS: 相移法Fig.8 (a) Improved center of gravity method recovery results; (b) Phase shift method recovery results; (c) Correlation algorithm recovery results; (d) Cross section of recovery results at X=150 CR: Correlation algorithm; CG: Improved center of gravity method; PS: Phase shift method |
提出了一种以相关度为基础的白光干涉信号解调算法, 相比于其他方法, 使用了白光干涉信号的全部信息, 无需进行粗定位就可实现高精度的三维检测。 本文首先对其进行了模拟仿真, 确定参数设置, 模拟仿真结果表明该方法具有可行性。 然后搭建实验系统检测了光栅和微透镜两种物体, 并分别使用相关算法、 改进的重心法、 相移法对其进行了三维形貌的恢复。 实验结果表明相关算法能准确地恢复出待测样品的表面三维形貌, 适用于不同物体的三维形貌检测, 精度高于改进的重心法, 接近相移法。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|