




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
高光谱激光雷达植被叶片方向反射特性及对叶绿素反演的影响
[白杰1, 2  , 牛铮
, 牛铮1, 2, * , 毕恺艺1, 2 , 王吉1, 2 , 黄滟茹2, 3 , 孙刚1 ]
, 牛铮, 毕恺艺|
|


作者简介: 白 杰, 1996年生, 中国科学院空天信息创新研究院博士研究生 e-mail: baijie19@mails.ucas.ac.cn
不同于传统被动光学传感器, 高光谱激光雷达发射主动式全波段高斯脉冲激光, 和植被叶片表面相互作用后, 不同波段后向散射强度返回至接收器并被记录下来。 以往的高光谱激光雷达植被叶片反射特性研究只聚焦于零度角入射的情况, 对多入射角方向反射光谱特性以及方向反射特性对叶片叶绿素含量估算带来的误差尚未进行过深入研究。 利用实验室研发的32波段高光谱激光雷达获取了不同入射角下的植被叶片反射光谱, 对高信噪比波段下植被叶片的复杂方向反射特性进行了深入分析, 随后选择光谱指数研究了高光谱激光雷达测量条件下植被方向反射特性对叶绿素含量反演的影响。 结果表明, (1)高光谱激光雷达植被叶片回波强度随入射角增大逐渐降低, 但二向反射率因子并不逐渐减小, 在可见光和近红外波段, 二向反射率因子随入射角增大分别呈现出两种不同形状特征, 可见光波段反射率因子最大值出现在0°~10°, 近红外波段最大值出现在60°, 反射率因子最小值均出现在45°处, 最大和最小反射率因子间可差0.1左右, 可见光和近红外波段10°~60°内二向反射率因子均呈现先减小后增大的趋势; (2)通过对不同入射角下光谱指数与叶绿素含量的回归分析发现, 方向反射特性对反演精度有非常大的影响, R2和RMSE并不随着入射角增大统一呈现同步增大或同步减小的趋势, 具体地, R2随入射角的变化趋势是先减小, 再增大, 再减小, 50°左右时最小, 增大发生在60°, RMSE则反之。 对于不同光谱指数, R2随入射角增大变化可达4倍, 波动范围为0.14~0.63, RMSE最大变化为1.5倍左右, 在0.5~0.8 mg·g-1内波动。 R2和RMSE的重大变化揭示了高光谱激光雷达植被叶片方向反射特性对叶绿素含量反演的重要影响。
Unlike traditional passive optical sensors, hyperspectral LiDAR emits the active, full-waveform and gaussian laser pulse. After interacting with the vegetation leaf surface, the backscattered intensities for different waveforms return to the receiver and are then recorded. Previous research on spectral reflection characteristic have only focused on the circumstance at the incidence angle of 0°, the reflection characteristics at other multiple incidence angles and their impacts and errors on leaf chlorophyll content estimation have seldom been studied. This study used the hyperspectral LiDAR with 32 bands developed by our lab to obtain the leaf reflection spectrum over different incidence angles, and the intricate reflection characteristic was then analyzed at the bands with the high signal-to-noise ratio. After that, spectral indices were chosen to study the impact of leaf bi-directional reflection characteristics measured by hyperspectral LiDAR on leaf chlorophyll content estimation. The results show that, (1) the returned intensity of vegetation leaf measured by hyperspectral LiDAR gradually decreases as the incidence angle increases, but the bi-directional reflectance factor (BRF) does not show the same trait with intensity. There are two different features with the incidence angle in the visible and near-infrared bands. The maximum BRF value for visible bands occur in the incidence angles of 0° to 10°, but 60° for the maximum BRF values for the near-infrared bands. The minimum BRF values for all bands both occur in the incidence angle of 45°, and the difference between the maximum and minimum values is about 0.1. The changing trend of the BRF at the incidence angle of 10° to 60° for the visible and near-infrared bands decreases first and then increase; (2) BRF has a great impact on chlorophyll retrieval accuracy based on the relationship analysis on spectral indices and chlorophyll content at different incidence angles. However, there is not a synchronous decrease or synchronous increase trend for R2 and RMSE. Specifically, R2 decreases first, then increases, and finally decreases to the minimum at the incidence angle of 50°, in which the increase occurs at 60°. RMSE presents the opposite changing trend. For the different spectral indices, R2 owns a 4 times fluctuation with 0.14~0.63. RMSE owns about 1.5 times fluctuation with 0.5~0.8 mg·g-1. The great changes of R2 and RMSE reveal the essential impact of bi-directional reflection characteristics on leaf chlorophyll content retrieval.
植被叶片方向反射特性是植被叶片的重要物理属性, 与植被的叶片表面结构和生化组分密切相关。 高光谱激光雷达作为一种新型传感器, 可在全天时、 复杂环境下使用, 可以获得观测对象含有高光谱属性的全波形激光雷达回波[1, 2, 3], 为植被叶片光谱特性的获取提供了新的观测途径。 和被动光学领域里的光谱仪不同, 高光谱激光雷达测定光谱不易受到环境和光源在空间变化等因素的影响, 能够获取每个发射脉冲与叶片目标复杂相互作用后的回波在时间维上的波形剖面, 在不同温度、 湿度等大气条件及黑暗环境下能良好使用[4]。
对植被光谱进行分析能够得到植被生理生化参数, 有助于监测植被生长和健康状况[5], 研究表明高光谱激光雷达与ASD光谱仪有一定的相近的光谱获取性能, 能够被用来准确反演植被生化组分[6, 7, 8, 9]。 植被叶片法线方向和激光入射方向有一个夹角, 称为激光入射角, 在不同入射角下, 激光光斑在叶片表面覆盖部分的叶片结构和内部的生化组分会发生变化, 呈现出不同特征, 高光谱激光雷达植被叶片存在着复杂的方向反射特性。 目前针对高光谱激光雷达植被叶片复杂方向反射特性分析的研究较少[2, 4, 10], 大多数研究在获取植被生化组分尤其是三维分布时也忽略了植被复杂方向反射特性对叶绿素含量估算的影响[3, 11, 12, 13]。 高光谱激光雷达测量条件下植被叶片复杂方向反射特性到底如何, 高光谱激光雷达植被叶片方向反射特性是否会给植被叶绿素含量估算结果带来误差, 会带来多大估算误差, 这些问题亟需进行深入研究。
聚焦于探索植被叶片在高光谱激光雷达条件下的复杂方向反射特性, 厘清高光谱激光雷达与植被叶片作用机制, 通过分析基于研发的32波段高光谱激光雷达系统[14]获取的两种植被叶片在0° ~70° 入射角下的回波强度和二向反射率因子, 揭示高光谱激光雷达植被叶片复杂方向反射特征, 并通过植被指数与叶绿素含量相关关系建模, 评估高光谱激光雷达植被方向反射特性对植被叶片叶绿素含量估算的影响, 充实了近几年高光谱激光雷达植被遥感领域的研究内容。
研制的高光谱激光雷达由超连续谱激光光源、 激光发射系统、 接收系统、 示波器、 扫描云台和控制中心组成, 能够采集409~914 nm的32波段光谱信号, 原型机系统和光路结构如图1(a)和图1(b)所示。 其超连续谱激光光源发射连续谱脉冲, 经过光纤和准直器后, 变成一束汇聚光束, 其发散角为5 mrad, 后经反射镜和透射镜射出到达植被叶片表面, 与植被相互作用后返回。 返回的植被叶片后向散射强度经折射式望远镜进入镜筒, 后经反射镜和光纤到达分光系统, 分光系统将其分离为独立的波段, 这样, 32个波段通过光电探测器被探测、 记录下来, 形成光谱。 该激光雷达云台转轴可以支撑镜筒上下左右扫描, 最终形成点云数据, 且每个扫描点包括光谱信息和距离信息两种。
 | 图1 高光谱激光雷达原型机 (a): 原型机照片; (b): 光学结构 L0、 L1和L2分别为消色差透镜; M1为微透反射镜; M2和M4为反射镜; M3为漫反射镜; M5为准直镜; M6为会聚镜; G为光栅; PA为光电倍增管阵列; HG为灵敏度调节器; MAT为转换矩阵; APD1为雪崩二极管; OF1和OF2为光纤; MOF为微结构光纤Fig.1 Hyperspectral LiDAR prototype (a): Shoot of the prototype; (b): Optical structure L0, L1, and L2 represent the achromatic lens; M1 represents the microlens; M2 and M4 represent the reflectors; M3 represents the diffuse mirror; M5 represents the collimation mirror; M6 represents the converging mirror; G represents the grating; PA represents a photosensitive array; HG represents sensitivity regulator; MAT represents the switch matrix; APD1 represents an avalanche photodiode; OF1 and OF2 represent the optical fiber; MOF represents the microstructure optical fiber |
传统多波段激光雷达通常选择独立多激光器进行组合来发射多个波段的激光, 这种组合系统通常面临发射时间难以同步、 难以获取高重复频率波形的问题, 各类激光器耦合在一起, 造价高, 稳定性和可靠性也受到一定影响。 本系统使用超连续谱激光光源NKT SuperK Compact作为光源, 它具有的优点有:
(1)频谱覆盖有紫外、 可见光、 红外区域, 带宽大, 光谱范围为450~2 400 nm;
(2)泵浦光稳定性和光滤波器独特性使得SuperK Compact比其他激光光源更稳定;
(3)重复频率20~30 kHz, 输出脉冲宽度1~2 ns;
(4)平均功率稳定性0.2 dB。
此外, 分光系统采用光栅分光系统, 相比滤波和干涉式分光系统, 结构更简单, 且拥有更宽的光谱测量范围和更高的光谱分辨率, 是目前应用最为广泛且综合性能较为突出的分光系统。 通过光栅分光, 最终获得目标物的32波段回波信号。
使用上述高光谱激光雷达系统采集植被叶片光谱并分析其复杂的方向反射特性, 包括回波强度和二向反射率因子特征。 为研究高光谱激光雷达植被方向反射特性对叶绿素含量估算的影响, 分别将不同入射角下得到的光谱指数与叶绿素含量进行回归分析。 选择了反演叶绿素时较常用的绿波叶绿素指数(green chlorophyll index, CIgreen)、 归一化差值植被指数(normalized difference vegetation index [670, 800], NDVI670, 800)和简单比值指数(simple ratio [750, 550], SR750, 550), 如表1所示。
| 表1 研究中用到的光谱指数 Table 1 The spectral indices used in this study |
随后使用决定系数(determination coefficient, R2)和均方根误差(root mean square error, RMSE)作为回归误差的评价指标。
式(1)和式(2)中, yi和
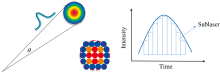
叶片表面结构的叶脉使叶片表面分布有很多“ 沟壑” , 叶片局部区域表面或凸起或凹陷, 此外, 叶片表面还有一层很薄的蜡质层, 二者对太阳辐射的反射具有近似镜面反射的性质。 高光谱脉冲激光光束和太阳光束的区别在于二者光的性质不同, 前者是高斯光, 光的能量大小随时间变化上呈高斯曲线状, 光斑落在目标物上后, 其光斑内部能量分布呈现由光斑正中间沿半径向外依次减小的高斯函数分布, 如图2所示。 每个光斑内部又可以看作多个子圆光斑的组合, 每个子圆光斑的能量也随时间变化呈高斯函数分布。 因此, 可以明确的是, 植被叶片的镜面反射本身是叶片结构与光子的相互作用, 对高光谱脉冲激光光源和太阳光源来说作用是一样的, 不同的是前者是一个光斑内部配合着能量高斯变化的镜面反射, 而后者可单独看做一个点大小内能量不变的镜面反射。 植被叶片内部生化组分也是影响叶片表面反射特性的又一因素, 对高光谱激光光束来说, 内部生化组分主要使叶片产生近似漫反射的后向散射特性。
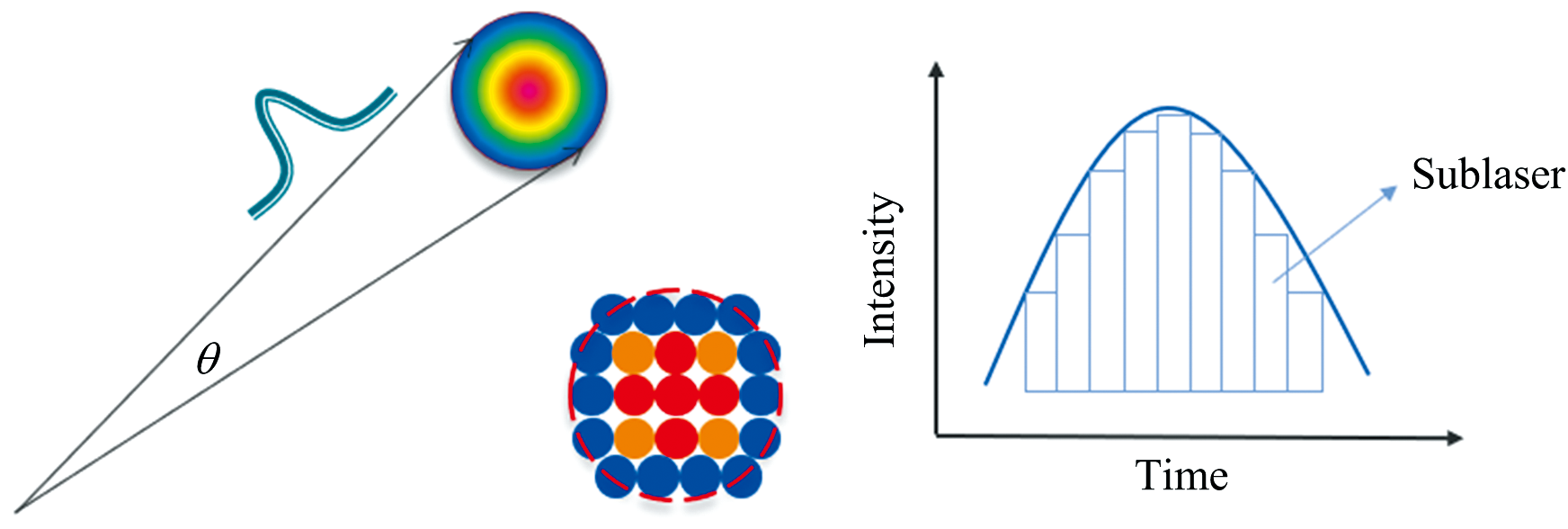 | 图2 脉冲激光光束能量分布Fig.2 Energy distribution of a pulse laser |
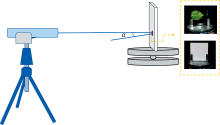
热点方向观测是高光谱激光雷达系统观测的重要特点, 由于发射和接收器均在同一方向, 因此在对植被进行探测时, 该系统始终处于热点观测状态, 高光谱激光雷达植被复杂方向反射特性就是指植被叶片法线方向和激光入射方向不同夹角(称为入射角)下光谱的各向异性。 利用高光谱激光雷达测定了植被叶片的方向反射特性, 实验表明523~816 nm波段内该系统测得的数据信噪比高[7], 因此后续实验及分析均采用该波段内的实验数据。 绿萝是常见阔叶类植被叶片, 实验中以绿萝为研究对象, 大小为25.42 cm× 18.57 cm, 叶平展, 有利于实验观测。 实验测得了不同入射角下绿萝叶片及99%标准反射板的后向散射回波强度, 入射角设置为0° ~70° 。 为详细展示叶片的反射光谱特征, 步长设置为5° 。 实验原理如图3所示。
 | 图3 实验原理图Fig.3 Schematic diagram of the experimental principle |
为获得叶片二向反射率因子(bi-directional reflectance factor, BRF), 需要对其进行定标, 定标方法为相同入射角下叶片回波强度与标准反射板回波强度的比值
式(3)中, rλ (α )为叶片在入射角α 和波长λ 的二向反射率因子, Il, λ (α )为叶片在高光谱激光雷达下测得的回波强度, Iw-p, λ (α )为标准反射板的回波强度, rw-p为标准反射板的反射率, 本研究中为0.99。
高光谱激光雷达测得的植被叶片后向散射回波强度如4所示, 由图4(a)可知, 在可见光523~653 nm范围内, 叶片变化趋势较为平缓, 回波强度较小, 在670 nm处回波强度开始增大, 在红边686~719 nm范围内开始出现陡然上升的狭长“ 地带” , 这说明植被叶片薄壁细胞组织对高斯脉冲光束仍然具有强反射作用, 细胞间隙的多重散射作用对高能量、 高斯光仍会造成高反射的现象。 在近红外波段内, 总体上, 植被叶片回波强度出现迅速下降的趋势, 但强度值仍高于可见光, 在768和784 nm处, 植被叶片回波强度比较接近。 同时, 从图4(a)可以看出, 从0° 入射角开始, 植被叶片回波强度会随激光方向与叶片法线方向间的入射角增大而逐渐降低, 70° 时各波长回波强度均达到最小。 图4(b)以入射角为横坐标, 更加清晰地展示了各波长随入射角的变化趋势, 可以看出, 0° ~10° 范围内叶片回波强度下降缓慢, 但在10° ~25° 范围内, 开始急剧下降, 在30° ~70° 时, 可见光波段内回波强度比较接近, 稳定到一定水平, 几乎不再下降, 但近红外波段回波强度依然下降, 且强度值均高于可见光, 这与图4(a)中可见光与近红外区域叶片回波强度展现出的变化趋势是一致的。
 | 图4 高光谱激光雷达叶片回波强度Fig.4 Intensities of backscattered signals measured by hyperspectral LiDAR |
为研究叶片二向反射率因子变化曲线, 同时测量了标准反射板的回波强度, 如图5所示。 与植被叶片不同的是, 白板对脉冲激光反射的回波强度总体上呈现先上升后下降的变化趋势, 由图5(b)可知, 10° ~25° 范围内并未出现急剧下降的情况, 这与植被变化趋势有所不同, 是由于标准反射板的漫反射特性造成的。 但总体上, 各波段对应标准反射板的回波强度值随入射角的增大而逐渐降低, 70° 时也达到最小。
 | 图5 高光谱激光雷达标准反射板回波强度Fig.5 Intensities of reflectance standard measured by hyperspectral LiDAR |
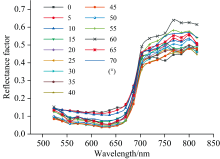
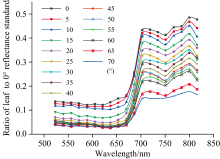
尽管植被叶片回波强度值随入射角的增大而逐渐减小(图4), 但这并不意味着植被二向反射率因子变化也呈现同样的变化趋势。 利用式(3)计算了植被叶片的二向反射率因子, 其随入射角的变化如图6所示。 从图6反射率因子随波长的变化趋势可以看出, 同一入射角下, 植被叶片的二向反射率因子在绿光波段到红光波段, 变化趋势较为平缓, 略微下降。 在绿光波段反射率因子值较大, 在红光波段达到最低, 这是叶片叶肉细胞内部色素含量吸收和反射作用的结果。 再之后开始缓慢上升, 并在红边波段反射率因子出现陡然上升的趋势, 在近红外波段达到最高。 从反射率因子随入射角变化趋势来看, 在可见光波段内, 0° 入射角的反射率因子最大, 但并不是随入射角增大一直呈下降趋势, 例如70° 入射角下二向反射率因子值就大于20° 时的值, 整个入射角范围内, 40° ~45° 范围反射率因子是最小的; 在近红外波段内, 上述变化趋势则明显不同, 60° 入射角的反射率因子最大, 45° 时反射率因子达到最小。 这种变化从二向反射率因子计算公式[式(3)]和回波强度随入射角变化(图4和图5)分析便可得知, 尽管植被叶片和标准反射板的回波强度是随入射角的增大逐渐降低的, 但是这种降低趋势通过比值计算之后便会发生变化。 为了对比分析, 同时给出了植被叶片各个方向回波强度与法线方向(0° 入射角)处标准反射板回波强度的比值变化曲线, 如图7所示, 可以看出, 这种定标方式下, 叶片各方向回波强度与0° 标准反射板的比值会随入射角的增大而逐渐降低, 但由于这种定标方式只是回波强度的一种归一化方式, 其结果并不是二向反射率因子, 在高光谱激光雷达植被光谱分析中没有实际意义, 因此在实际应用中也应当避免使用该种计算方式。
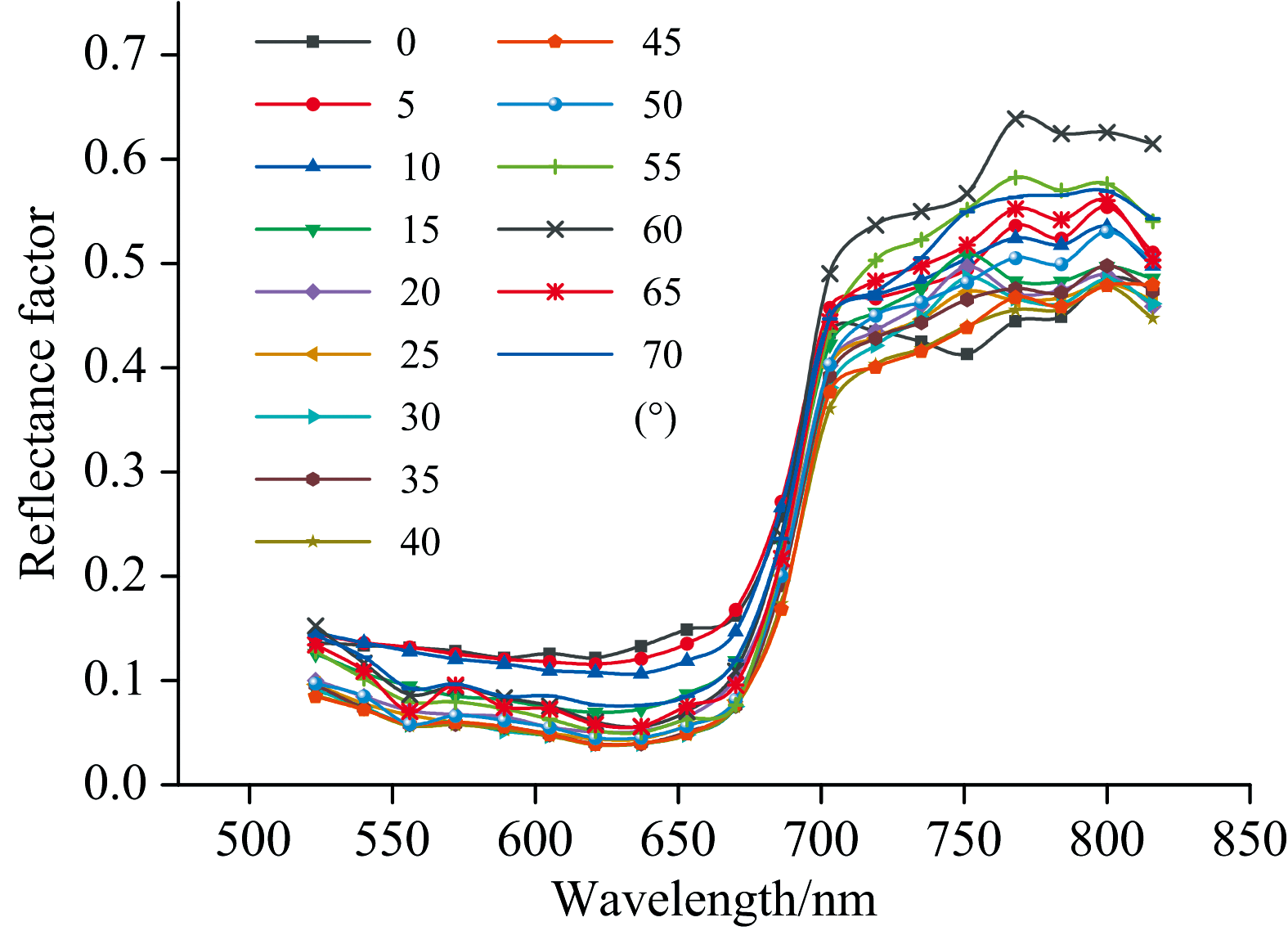 | 图6 高光谱激光雷植被叶片复杂方向反射特性: 随波长变化趋势Fig.6 Intricate reflection characteristics of leaf sample measured by hyperspectral LiDAR: the changing trend with wavelength |
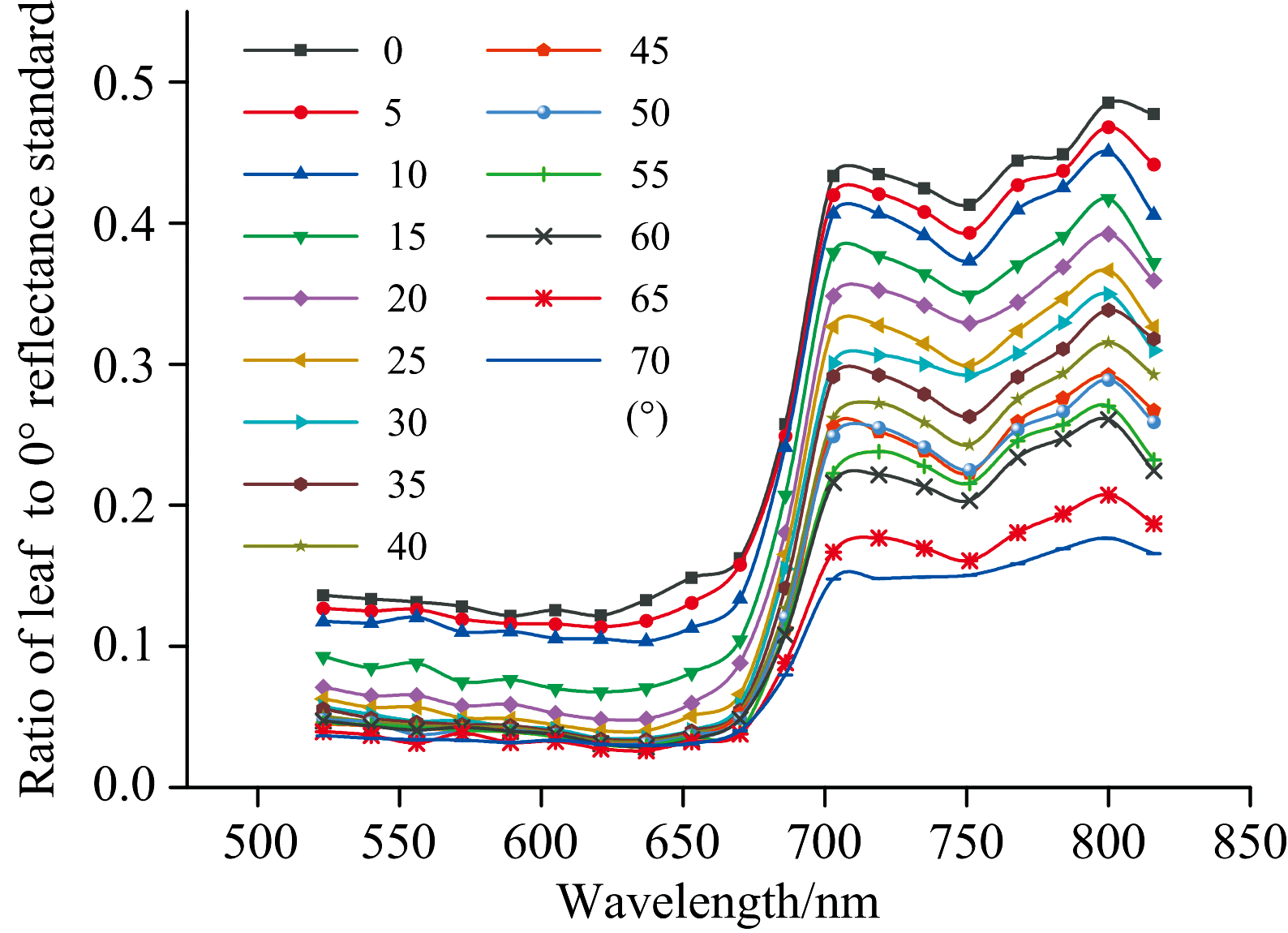 | 图7 高光谱激光雷植被叶片各方向回波强度与0° 标准反射板的比值Fig.7 Ratio of leaf intensities at different incidence angles to the intensity of reflectance standard at the incidence angle of 0° |
为了进一步展示植被叶片随入射角变化的趋势, 充分挖掘植被叶片在高光谱激光雷达下的复杂方向反射特性, 据图6分析结果, 以入射角为自变量绘制了二向反射率因子的变化曲线, 如图8所示。 图8(a)为可见光波段范围内变化情况, 图8(b)为近红外波段范围内变化情况, 可以看出, 两种情况下, 二向反射率因子变化趋势显然不相同, 反射率因子曲线形状也有明显差异。 由图8(a)可知, 二向反射率因子值在0° ~10° 时较大, 在10° ~30° 范围内迅速下降, 在45° 时达到最小, 之后开始缓慢上升, 60° 时有极大值, 但总体小于0° ~10° 时的值。 在近红外波段内, 如图8(b)所示, 二向反射率因子在0° ~10° 范围内有一个上升趋势, 10° ~45° 范围内缓慢下降, 之后开始在45° ~60° 时显著上升, 在10° 和60° 有两个极大值, 且60° 时二向反射率因子达到最大。 可见光和近红外波段在65° ~70° 时均有一个下降再上升的趋势。 总体来看, 高光谱激光雷达植被叶片二向反射率因子在可见光和近红外波段随入射角的形状变化特征是不同的, 高光谱激光雷达植被叶片的这种复杂反射特性, 实际上是由于不同波段的激光与植被叶片表面结构、 叶肉细胞内部色素和细胞间隙多重散射相互作用的结果。
 | 图8 高光谱激光雷植被叶片复杂方向反射特性: 随入射角变化趋势Fig.8 Intricate reflection characteristics of leaf sample measured by hyperspectral LiDAR: the changing trend with incidence angle |
为研究植被叶片方向反射特性对叶绿素含量估算的影响, 利用高光谱激光雷达分别测定青杨和山玉兰等常见树种的20片叶片方向反射光谱, 测定了每片叶片的叶绿素含量。 叶绿素含量测量是通过利用叶绿素a和叶绿素b吸收光谱的不同, 测定各特定峰值波长下的光密度, 再根据色素分子在该波长下的消光系数, 最终利用分光光度计在665和649 nm处进行比色, 记录OD值, 测得叶绿素含量。 为免实验环境和操作过程对叶绿素含量造成不必要的影响, 取叶片样品后立即在暗室中测量叶片的高光谱激光雷达回波强度, 之后立刻将该片叶片送去实验室化验其叶绿素含量。 测定高光谱回波强度和叶绿素含量后分别计算不同入射角下表1中的光谱指数, 将各个入射角下的光谱指数与叶绿素含量进行回归分析。 以CIgreen指数为例, 图9展示了不同入射角下CIgreen指数与叶绿素含量间的相关关系, 包括另外两种指数NDVI670, 800和SR750, 550在内所有指数的反演精度见表2。
 | 图9 不同入射角下CIgreen指数与叶绿素含量间的估算模型Fig.9 The estimation models between CIgreen at different incidence angles and leaf chlorophyll content |
| 表2 不同入射角下的植被指数反演叶绿素含量的精度 Table 2 The retrieval accuracies of different spectral indices at different incidence angles for chlorophyll content |
由图9可以看出, 对于决定系数R2, 变化范围为0.143 5~0.634 7, R2最大值是最小值的4.4倍, 且整体随入射角呈现先减小, 后增大, 再减小的趋势, 其中, 在0° 入射角时最大, 为0.634 7, 随着入射角增大, R2逐渐减小, 随后降低至50° 时的0.255 9, 随后在60° 入射角时R2有回升, 70° 时继续降至最小, 为0.143 5。 对于均方根误差RMSE, 0° 时反演误差最小, 为0.519 7 mg· g-1, 随后逐渐增大至50° 时的0.741 8 mg· g-1, 随后在60° 入射角时RMSE减小, 70° 时继续增大至0.795 8, RMSE的变化范围为0.519 7~0.795 8, 误差变化最大可达1.5倍, 不同入射角下回归方程p值均小于0.1。 值得注意的是, 从图9可以明显看出, 散点聚焦程度在随着入射角增大而发生变化, 由0° 时聚集先变得离散, 在50° 时离散程度最大, 随后在60° 入射角时, 离散程度减小, 又变集聚, 70° 时离散程度再次增大, 可以发现与其对应的是图中横坐标的变化, 即自变量光谱指数值在发生变化, 这是由于光谱指数是由不同波段的反射率因子进行数学运算得来的, 同一波段的反射率因子在不同入射角的值是不相同的, 由它们构建的植被指数大小必然不同, 而同一批叶片其叶绿素含量是固定的, 因此建模过程中, 不同入射角下的植被指数值的范围就会发生变化, 这样在叶绿素含量估算时散点的聚集程度和回归方程R2和RMSE便有所差异, 造成不同入射角下的估算误差。 由表2也可以看出, 对于NDVI670, 800和SR750, 550, R2和RMSE并不是随着入射角增大统一呈现同步增大或同步减小的趋势。 对于NDVI670, 800, R2随入射角的变化趋势是先减小, 再增大, 再减小, RMSE则反之, R2的取值范围为0.332 9~0.468 2, 最大值为最小值的1.4倍, RMSE变化范围为0.627 1~0.702 3, 对于SR750, 550, R2取值范围为0.131 8~0.627 0, 最大值是最小值的4.8倍, RMSE为0.525 2~0.801 2, 最大波动1.5倍。 对于决定系数R2, 三者均在50° 左右时达到最小, 随后60° 时增大, 70° 时再次降低, RMSE反之。 需要指出的是, SR750, 550在70° 时回归方程p值小于0.1, 但总体上看并不影响反演精度和误差的整体变化趋势。
(1)展示了高光谱激光雷达植被叶片回波强度随入射角的变化特征, 揭露了高光谱激光雷达植被叶片二向反射率因子变化趋势。 结果表明高光谱激光雷达植被叶片二向反射率因子并不是随着入射角的增大而逐渐减小, 在可见光和近红外波段, 植被叶片分布展现出不同形状的变化曲线, 可见光波段反射率因子最大值出现在0° ~10° , 近红外波段最大值出现在60° , 反射率因子最小值均出现在45° 处, 最大和最小反射率因子间可差0.1左右。
(2)高光谱激光雷达植被叶片方向反射特性确实会影响植被叶绿素含量估算结果。 反演结果R2和RMSE并不是随着入射角增大统一呈现同步增大或同步减小的趋势, R2随入射角的变化趋势是先减小, 再增大, 再减小, RMSE则反之。 对于不同光谱指数, R2随入射角增大最大变化可达4倍, RMSE最大变化1.5倍左右, 在0.5~0.8 mg· g-1内波动。
针对高光谱激光雷达植被叶片方向反射特性及对叶绿素含量反演的影响研究, 对高光谱激光雷达植被定量遥感研究具有重要意义, 为后续植被三维生化参数准确估算提供了一定的参考。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|