{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
车载小型DOAS系统获取淮北地区大气污染气体方法研究
[张琦锦1, 2  , 郭映映
, 郭映映1, 2 , 李素文1, 2, * , 牟福生1, 2, * ]
, 郭映映, 牟福生]
|
|


作者简介: 张琦锦, 1999年生, 淮北师范大学物理与电子信息学院硕士研究生 e-mail: qjzhang2020@outlook.com
我国城市气体污染物主要包括氮氧化物、 臭氧、 二氧化硫和颗粒物等, 其中NO2和SO2是气体污染物中常见的污染痕量气体, 对地气辐射、 全球气候、 空气质量和人体健康都有着直接或间接的影响。 淮北地区是我国基础能源和重要原料煤炭的生产基地, 长期的煤炭生产使得当地大气环境污染相对更为复杂, 开展快速获取大气污染物浓度是目前研究热点之一。 差分吸收光谱(DOAS)仪是一种光学遥感式光谱设备, 具有稳定、 时间分辨率高、 灵敏度高和不受搭建平台制约等优势特点, 可同时获取多种污染气体的浓度信息。 针对淮北地区复杂的环境污染, 构建了基于移动平台的车载小型差分吸收光谱系统(DOAS), 该系统包括光谱采集系统、 温控系统和GPS定位系统。 利用车载GPS定位系统记录移动过程中的经纬度和车速, 光谱仪放置在恒温系统中, 保障系统测量的精准性。 在实验期间, 首先测试了系统的性能, 规划了走航观测路线, 并将车载DOAS测量结果与地基MAX-DOAS进行对比以验证系统的准确性, 实现了对淮北地区的大气典型污染物的快速、 便捷、 精准监测。 航测期间, 利用QDOAS软件对原始测量光谱进行反演处理, 选取相对干净的光谱作为参考谱, 获取了淮北地区NO2和SO2柱浓度空间分布, 其中NO2的浓度范围为5.09×1015~15.4×1016 molecule·cm-2, SO2的浓度范围为3.53×1015~9.07×1016 molecule·cm-2。 将车载DOAS测量的结果分别与站点地基MAX-DOAS测量结果和卫星(TROPOMI)数据对比, 均具有较好一致性(相关系数 R2>0.75)。 外场实验表明构建的车载小型DOAS系统可以准确的获取城市污染气体柱浓度分布, 为确认城市污染气体的源区和校验卫星遥感数据提供一种有效的技术手段。
Urban air pollutants in China mainly include nitrogen oxides,ozone,sulfur dioxide and particulate matter. NO2 and SO2 are common trace gases in atmospheric pollutants, which directly or indirectly impact ground air radiation,global climate,air quality and human health.Huaibei region is the production base of basic energy and important raw material coal in China. Local atmospheric pollution has become more complex due to long-term coal production. It is one of the research hot pots to acquire atmospheric pollutant concentration quickly. Differential optical absorption spectrometer(DOAS) is an optical remote sensing spectral equipment,which has the advantages of stability, and high sensitivity and is not restricted by building platform. It can obtain the concentration information of a variety of polluting gases at the same time. Because of the complex environment pollution in Huaibei, this paper constructed a mobile mini differential optical absorption spectroscopy(DOAS) system based on the mobile platform, which includes a spectrum acquisition system, temperature control system and GPS positioning system. The GPS positioning system was used to record the longitude, latitude and speed during the movement. The spectrometer was placed in the constant temperature system to ensure the accuracy of the system measurement. During the experiment, the performance of the system is tested, and the navigation observation route is planned first. The mobile DOAS measurement results are compared with the MAX-DOAS to verify the accuracy of the system to realize the rapid, convenient and accurate monitoring of typical atmospheric pollutants in Huaibei. During the measurement period, QDOAS software was used for inversion processing of the originally measured spectra and the relatively clean is selected as the reference spectrum to obtain the spatial distribution of NO2 and SO2 column concentration in the Huaibei region. The range of NO2 concentration is 0.509×1016~15.4×1016 molecule·cm-2, and that of SO2 is 0.353×1016~9.07×1016 molecule·cm-2. The results of mobile Mini-DOAS measurements were compared with MAX-DOAS measurements and TROPOMI data, which showed good consistency (correlation coefficient R2>0.75). Field experiments show that the mobile Mini-DOAS system can accurately obtain the distribution of urban pollution gas column, providing an effective technical means for confirming the source area of urban atmospheric pollution and verifying satellite remote sensing data.
随着国家工业化发展, 大量的污染气体排放到大气环境中, 这些污染气体对空气质量和气候变化都产生了重要影响。 SO2和NO2是大气中常见的痕量气体, 不仅危害人体健康, 而且对生态环境也有严重影响[1, 2]。 安徽淮北地区是我国基础能源和重要原料煤炭的生产基地, 长期的煤炭生产对当地生态环境和居民健康都产生了严重影响[3]。 掌握淮北地区污染气体的排放特征, 对研究该地区污染物浓度分布、 输送和卫星数据校验具有重要意义。
目前区域污染气体检测方法主要是卫星观测和站点仪器等。 卫星观测的空间分辨率较低, 并且还会受到大气中云层分布的影响, 不能精确的反映小区域污染气体分布情况[4]。 站点仪器有同时检测多成分气体、 测量精度高、 可实时监测等优点, 但无法实现对城市的移动监测。 近年来, 基于车载移动平台差分吸收光谱(DOAS)技术在污染气体检测方面获得了广泛应用, 该技术具有快速、 便捷、 精确监测等优势[5]。 吴丰成等利用车载DOAS技术航测了石家庄某电厂的污染分布[6], 牟福生等利用车载DOAS测量了华北平原SO2和NO2的排放, 黄业园等利用车载DOAS测量了武汉地区NOx的分布[7]。 本工作利用构建的小型车载DOAS系统, 对淮北地区污染气体分布进行移动观测, 获取了淮北地区SO2和NO2的浓度分布[8]。
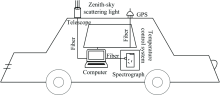
图1为搭建的车载小型差分吸收光谱系统平面图。 该系统主要是由温控系统、 光谱仪、 望远镜、 光纤、 GPS定位系统、 计算机等组成[9]。 望远镜采集天顶方向的太阳入射光, 光纤将采集到的光传到光谱仪, 光谱仪将接收的光信号转换为电信号传输到计算机系统进行处理。 其中GPS定位系统主要记录移动过程中的经度、 纬度和车速等信息[9]。 在实验期间, 首先对系统进行性能测试, 以确保测量数据的精准性。 光谱仪作为核心部件, 选用的是海洋公司HR2000+微型光谱仪。 在暗室中, 设置光谱仪最小积分时间(1 ms), 平均扫描次数为1 000次, 连续测量两次确定光谱仪的平均偏置(935.8 counts)。 将测量得到的两条光谱相减, 利用DOASIS软件得到光谱仪的电子噪声(0.587 counts)。 设置平均扫描次数1次, 改变积分时间得到不同积分时间情况下的光谱, 并做偏置修正, 从而测量出光谱仪暗电流(0.186 counts· s-1)。 在外场实验过程中光谱仪均存放在温控系统中以避免因温度变化引起的光谱漂移, 温控系统的温度设置在25 ℃。
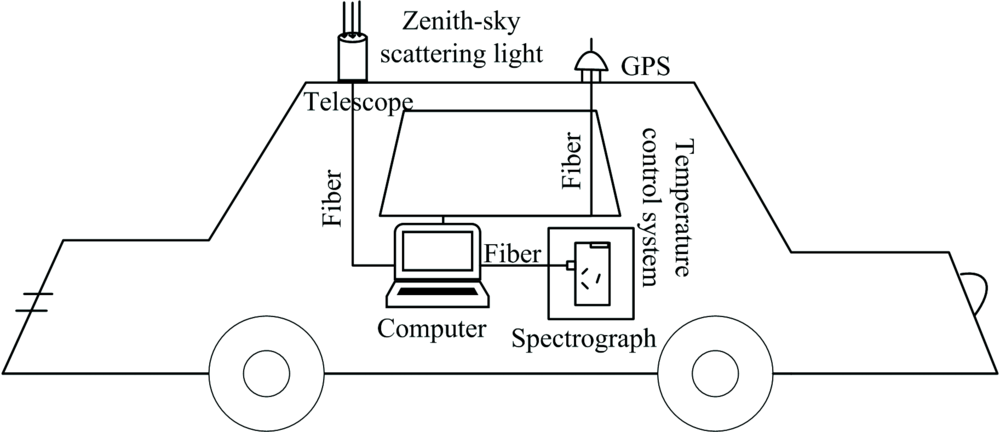 | 图1 车载小型DOAS系统Fig.1 Mobile mini-DOAS system |
系统以天顶方向的太阳散射光为光源, 利用气体对不同波段光的特征吸收来获取光谱信息[10]。 太阳光在大气传输的过程中, 受到痕量气体的散射、 吸收等各种作用而发生衰减, 前后光强的变化结合Lambert-Beer定律描述[11]。
式(1)中, I0(λ )为太阳光参考谱(相对“ 干净” 的测量谱), I(λ )为经过气体吸收后探测到的太阳光谱, σ 'i(λ )表示差分痕量气体吸收截面, ci为气体浓度, L为入射光通过的光程[12]。 在实际大气环境中, 由于光程未知, 可以将浓度和光程合并, 即
式(2)中, ln
为了验证系统测量的准确性, 规划了航测路线, 实验路线是沿着固定站点MAX-DOAS的测量方向。 利用构建的车载小型DOAS系统于2021年4月至6月在淮北地区开展了五次走航观测实验, 得到了城区的SO2和NO2的空间分布信息。 测量时望远镜固定在车窗外, 高于地面约1.5 m, 观测方位角始终保持天顶方向。 走航期间的天气为晴天, 实验时间段为中午12点前后, 该时间段太阳天顶角较小。 单次走航总里程约为28 km, 实验车辆行驶速度为(35± 5) km· h-1。
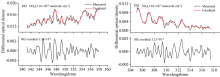
将系统测得的光谱进行反演处理, 得到测量路径上NO2和SO2浓度。 其中NO2和SO2拟合波段分别为341~358和305~317.5 nm, 参与NO2和SO2拟合过程的痕量气体分别为NO2, O3, O4, O3a(平流层臭氧)和NO2, O3, SO2。 将加入痕量气体的吸收截面与仪器函数进行卷积处理, 同时拟合过程中加入由狭缝函数和校正波长生成的ring光谱作为吸收气体的吸收截面, 以此反演出航测期间NO2和SO2的柱浓度。 具体参数设置如表1。 反演光谱的结果中, 出现了部分负值, 这些负值出现的原因是由于夫琅和费参考谱中痕量气体的吸收。 去除了负值和剩余噪声(RMS> 0.03)的数据, 其中NO2去除的数据占比为8.71%, SO2去除的数据占比13.80%[14]。 图2给出在2021年6月4日13:17测量的一条光谱的SO2和NO2的拟合实例。 其中黑色线和红色分别表示经过处理的吸收截面和拟合得到的差分吸收结构[15]。 其拟合残差主要来源于仪器噪声、 光纤连接端口反射光、 未知气体的吸收等。 航测期间NO2拟合误差范围为5.61%~18.08%, SO2的拟合误差范围为2.68%~19.04%[8]。
| 表1 NO2和SO2反演设置 Table 1 NO2 and SO2 retrieval fit settings |
 | 图2 2021年6月4号13:17车载DOAS测量光谱反演示例 (a): NO2; (b): SO2Fig.2 Spectral inversion example of mobile DOAS measurement at 13:17 on June 4, 2021 (a): NO2; (b): SO2 |
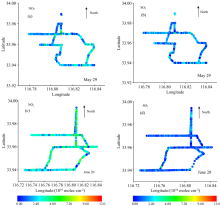
经过五次走航观测, 系统测量NO2的垂直柱浓度范围为5.09× 1015~15.4× 1016 molecule· cm-2, SO2的垂直柱浓度范围为3.53× 1015~9.07× 1016 molecule· cm-2。 该浓度整体要高于其他城市区域, 淮北地区NO2和SO2污染水平相对较高[12]。 将车载GPS记录的经纬度信息结合反演浓度信息, 得到车载观测路径上NO2和SO2垂直柱浓度空间分布特征[16]。 航测期间, 车载右侧路径NO2和SO2浓度偏高, 原因是此路段为工业发展区, 工厂排放使得污染物浓度变高。 图3为5月29日和6月20日车载DOAS系统在淮北地区走航观测的NO2和SO2的空间分布情况。
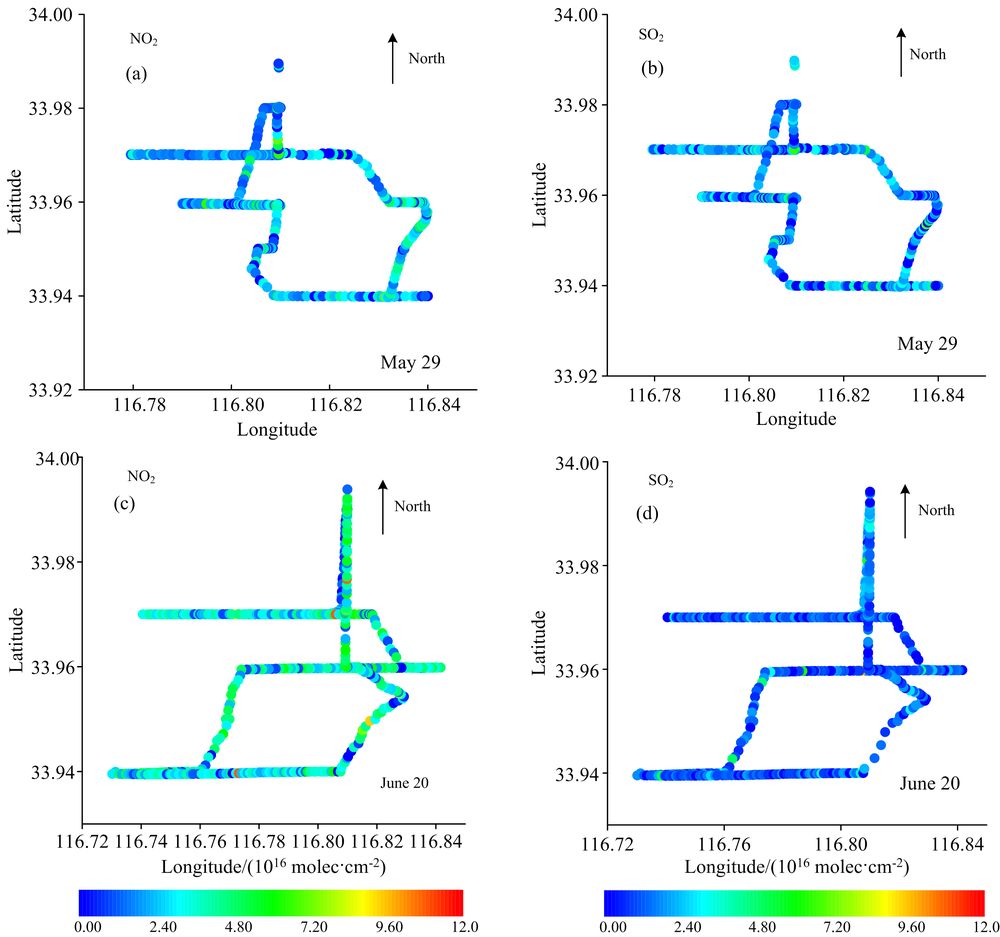 | 图3 淮北地区NO2和SO2垂直柱浓度分布Fig.3 NO2 and SO2 vertical columns densities distribution in Huaibei area |
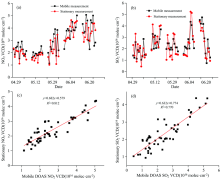
将车载DOAS反演的痕量气体垂直柱浓度与固定站点MAX-DOAS测量的结果进行对比[17]。 对比过程中将五次走航实验测量的痕量气体浓度按照点式仪器结果的时间分布求其均值。 如图4(a)和(b)所示, 由图可以看出, 五次走航实验测量的NO2和SO2浓度值和站点MAX-DOAS测量污染气体浓度值相差较小, 变化趋势基本一致。 将车载DOAS和MAX-DOAS测量的结果作相关性分析, 结果如图4(c)和(d)。 由图可以看出车载DOAS和MAX-DOAS的测量结果具有较好的一致性(
 | 图4 (a), (b)车载小型DOAS和站点MAX-DOAS的污染气体浓度对比; (c), (d)车载DOAS和MAX-DOAS数据相关性Fig.4 (a), (b) Comparison of pollution gases concentration between the mobile Mini-DOAS and stationary MAX-DOAS data; (c), (d) The correlation of the mobile DOAS and stationary MAX-DOAS data |
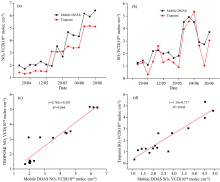
TROPOMI(对流层监测仪器)是搭载在Sentinel-5P的探测器, 成像分辨率为7 km× 3.5 km。 选取TROPOMI对流层浓度和车载DOAS观测结果进行对比, 对TROPOMI卫星数据进行格点化。 其中图5(a)和(b)显示了航测期间, 车载测量的污染气体浓度和TROPOMI测量的浓度, 图5(c)和(d)显示TROPOMI卫星数据柱浓度和车载DOAS观测结果的相关性, 二者具有较好相关性(相关系数r> 0.8)。
 | 图5 车载DOAS和TROPOMI柱浓度对比 (a), (b): 车载DOAS和TROPOMI数据对比图; (c), (d): 车载DOAS和TROPOMI数据相关性分析Fig.5 Comparison of the vertical column densities measured by the mobile DOAS and TROPOMI (a), (b): Mobile DOAS data with TROPOMI data; (c), (d): Correlation analysis of mobile DOAS and TROPOMI data |
构建了基于移动平台的车载小型DOAS系统, 利用构建的系统对淮北地区进行了走航实验。 在实验期间, 测试了系统的性能并规划了走航观测的路线, 使得航测路线围绕着站点MAX-DOAS的监测方向进行。 航测期间NO2和SO2浓度范围分别为5.09× 1015~15.4× 1016和3.53× 1015~9.07× 1016 molecule· cm-2。 将车载DOAS系统测量的结果分别与地基MAX-DOAS和TROPOMI卫星数据进行对比。 车载DOAS测量的浓度与站点MAX-DOAS测量结果和卫星(TROPOMI)数据均具有较好的相关性(相关系数R2> 0.75)。 表明构建的小型车载DOAS系统能实现对淮北地区的典型大气污染物的快速、 便捷、 精确的监测, 为获取城市区域污染气体浓度和卫星校验提供技术支持。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|