






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于重叠视场的拼接式高光谱相机非均匀性校正
[杨雷1, 2, 3  , 周锦松
, 周锦松1, 2, 3 , 景娟娟1, 2, 3 , 聂博洋1, 3, * ]
, 周锦松]
|
|


作者简介: 杨 雷, 1989年生, 中国科学院空天信息创新研究院助理研究员 e-mail: yangl@aircas.ac.cn
高光谱遥感能够提供丰富的地球表面信息, 因而受国内外学者的广泛关注。 受到技术与工艺水平影响, 目前单个高光谱相机无法同时满足成像大视场和高分辨率的应用需求。 拼接式高光谱相机技术将多个高光谱相机组合成一个成像系统, 有效地扩大了高光谱相机的视场, 在精准农业、 对地观测、 环境监测等方面有着广泛的运用。 由于探测器像元响应, 光学系统, 电子学系统等因素的影响, 高光谱相机的焦平面阵列在同一均匀辐射源下, 探测器单个像元输出会出现不一致的现象, 该现象即为高光谱相机的非均匀性。 拼接式高光谱相机的非均匀性会严重影响相机成像质量与图像判读。 目前, 非均匀性校正主要分为基于定标的校正方法和基于场景的校正方法两大类。 通过对中国科学院空天信息创新研究院研制的拼接式高光谱相机非均匀性的分析, 建立了单台相机和多台相机间的非均匀性模型, 并根据非均匀性模型提出了一种基于重叠视场的拼接式高光谱相机非均匀性校正方法。 该方法综合运用了实验室定标数据与实时飞行数据, 利用实验室辐射定标校正单台相机非均匀性, 利用相机间重叠视场并引入小波滤波计算非均匀性系数校正多相机间的非均匀性。 由于该方法在实验室仅需要对单台相机进行辐射定标, 因此也摆脱了需要大口径积分球光源的限制。 开展了一系列对不同方法处理后图像质量进行评价的实验。 选取了存在非均匀性两个不同的波段图像作为原始图像, 并用该方法与对比方法对原始图像进行处理。 为了能够定量地对不同方法的校正效果进行对比, 引入了图像质量的提高系数(IF), 非均匀性(NU)与光谱角(SA)三个评价指标。 结果证明, 本文提出的基于重叠视场的拼接式高光谱相机非均匀性校正方法具有最好的非均匀性校正效果, 同时最大程度保留了光谱特性。
Hyperspectral remote sensing can provide rich information on the earth’s surface, so it has attracted extensive attention from scholars at home and abroad. Affected by the level of technology, a single hyperspectral imager cannot meet the application requirements of a large field of view and high resolution simultaneously. Splicing hyperspectral imager technology combines multiple hyperspectral imagers into one imaging system, effectively expands the field of view of hyperspectral imagers, and is widely used in precision agriculture, earth observation, environmental monitoring, etc. Due to the influence of detector pixel response, optical system, electronic system and other factors, the output of a single pixel of the detector will be inconsistent when the focal plane array of the hyperspectral imager is under the same uniform radiation source, which is the non-uniformity of the hyperspectral imager. The non-uniformity of splicing hyperspectral imager seriously affects the image quality and interpretation.Non-uniformity correction methods are divided into calibration-based and scene-based correction methods. In this paper, non-uniformity models of a single imager and multiple imagers are established based on the analysis of the non-uniformity of the splicing hyperspectral imager developed by Aerospace Information Research Institute. Based on non-uniformity models, a novel non-uniformity correction method based on overlapping fields of view is proposed. This method integrates the laboratory calibration and the real-time flight data. The laboratory radiometric calibration is used to correct non-uniformity of a single image, while the overlapping field of view and wavelet filter isused to correct non-uniformity of multiple imagers. This method only needs to calibrate the radiation of a single imager in the laboratory so that it eliminates the limitation of requiring a large-aperture integrating sphere. Several experiments are carried out to evaluate the quality of images processed by different methods. Images with non-uniformity of two different bands are selected as original images, and original images are processed by the proposed method. In order to quantitatively compare the correction effects of different methods, three evaluation indexes,Improvement Factor (IF), Non-uniformity (NU) and Spectral Angle (SA), are introduced. The results show that the proposed method can correct non-uniformity effectively and preserve the spectrum features simultaneously as much as possible.
高光谱成像技术可以在获取目标空间维度图像的同时, 得到光谱维度的信息, 广泛应用于精准农业、 对地观测、 环境监测等领域[1]。 受到技术与工艺水平影响, 目前单个高光谱相机无法同时满足成像大视场和高分辨率的应用需求, 因此拼接式高光谱相机技术应运而生。 该技术将多个高光谱相机的视场进行拼接, 从而达到扩大有效视场的目的。
高光谱相机的非均匀性是指焦平面阵列在同一均匀辐射源下, 探测器单个像元的输出不一致性, 主要来自于探测器像元响应, 光学系统, 电子学系统等因素所产生的非均匀性[2]。 对于拼接式高光谱相机, 除了单台相机的非均匀性以外, 还存在各相机间的非均匀性。 非均匀性校正对提高高光谱数据质量具有重要意义。
目前, 非均匀性校正主要分为基于定标的校正方法和基于场景的校正方法两大类。 基于定标的校正方法主要包括实验室定标[3]和基于地面的外场定标[4, 5, 6], 通过获取相对辐射定标系数进行校正; 基于场景的校正方法主要包括直方图匹配[7, 8, 9]和矩匹配[10], 在假设成像系统的探测器各像元获取的信号具有相同的分布的前提下, 利用统计学规律进行非均匀性校正。 然而, 针对拼接式大视场的高光谱相机, 基于定标校正的方法需要足够口径的照明设备[11], 且工作时容易受外界条件干扰; 基于场景的校正方法的统计学前提只有在推扫方向获取的数据足够多时才能够成立, 同样具有一定的局限性。
针对中国科学院空天信息创新研究院自行研制的大视场机载拼接式高光谱成像仪系统, 提出了一种基于重叠视场的拼接式高光谱相机非均匀性校正方法。 通过对地物推扫成像数据的算法验证, 本方法可以较好地消除拼接式高光谱相机不同相机间的非均匀性, 同时最大程度上保留图像的原始信息。
中国科学院空天信息创新研究院自行研制的大视场机载拼接式高光谱成像仪系统, 为了保证更宽的成像视场, 可见光至近红外波段由三台可见光至近红外高光谱成像仪拼接而成。 三台相机安装在一个两轴稳定平台内部, 两轴稳定平台用于稳定视轴, 使得载荷可以在飞行过程中保持垂直向下的稳定状态。 高光谱成像仪相关技术指标见表1。
| 表1 高光谱成像仪技术指标 Table 1 Technical parameters of the hyperspectral imager |
三台可见光至近红外高光谱成像仪的焦距相同, 并选用了相同的探测器。 三台高光谱成像仪采用左中右三个视场拼接的方式。 左、 中、 右相机的有效视场角分别为12.6° 、 8° 、 12.6° 。 在安装时, 中间的高光谱成像仪为垂直下视, 左右两个高光谱成像仪采用外八字各自倾斜9.4° , 与中间相机有约1° 的重叠, 共同组成了30° 的总视场。 三台相机安装位置与对应视场情况如图1所示。
 | 图1 三台相机安装位置与对应视场情况Fig.1 Installation position and field of view of three imagers |
从一组拼接式相机对地拍摄数据中, 选取了第68波段(550 nm)与第153波段(750 nm)图像作为原始数据。 如图2所示, 两个波段的图像三台相机均存在明显的非均匀性。
 | 图2 非均匀性原始图像 (a): 第68波段原始图像; (b): 第153波段原始图像Fig.2 Original image with non-uniformity (a): 68th band of original image; (b): 153rd band of original image |
为了测试该非均匀性规律, 在实验室以积分球为均匀光源, 在入射光照, 电路增益以及曝光时间相同的条件下, 分别测试3台相机的成像情况。 由于光机遮挡, 3台相机在空间维度有效像元个数分别为: 1号相机1 968个, 2号相机1 982个, 3号相机1 308个。 连续拍摄500帧图像后在时间维度上取平均值, 得到3台相机对积分球响应的单帧图像如图3所示。
 | 图3 三台相机积分球响应 (a): 1号相机; (b): 2号相机; (c): 3号相机Fig.3 Integrating sphere data of three imagers (a): No.1 camera; (b): No.2 camera; (c): No.3 camera |
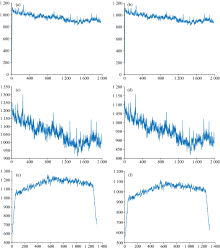
在积分球响应数据中, 选取每台相机光谱维第68波段(550 nm)及第153波段(750 nm)响应值, 如图4所示。
 | 图4 单台相机的非均匀性 (a): 1号相机第68波段; (b): 1号相机第153波段; (c): 2号相机第68波段; (d): 2号相机第153波段; (e): 3号相机第68波段; (f): 3号相机第153波段Fig.4 Non-uniformity of a single imager (a): 68th band of No.1 camera; (b): 153rd band of No.1 camera; (c): 68th band of No.2 camera; (d): 153rd band of No.2 camera; (e): 68th band of No.3 camera; (f): 153rd band of No.3 camera |
由图3与图4, 可以看出单台相机在相同光谱位置的不同空间维上的像元, 在相同的光照条件下响应存在差异, 即单台相机存在一定的非均匀性。
在积分球响应数据中, 选取3台相机空间维度的25%, 50%和70%三个视场所对应列数响应值的均值, 结果如图5所示。
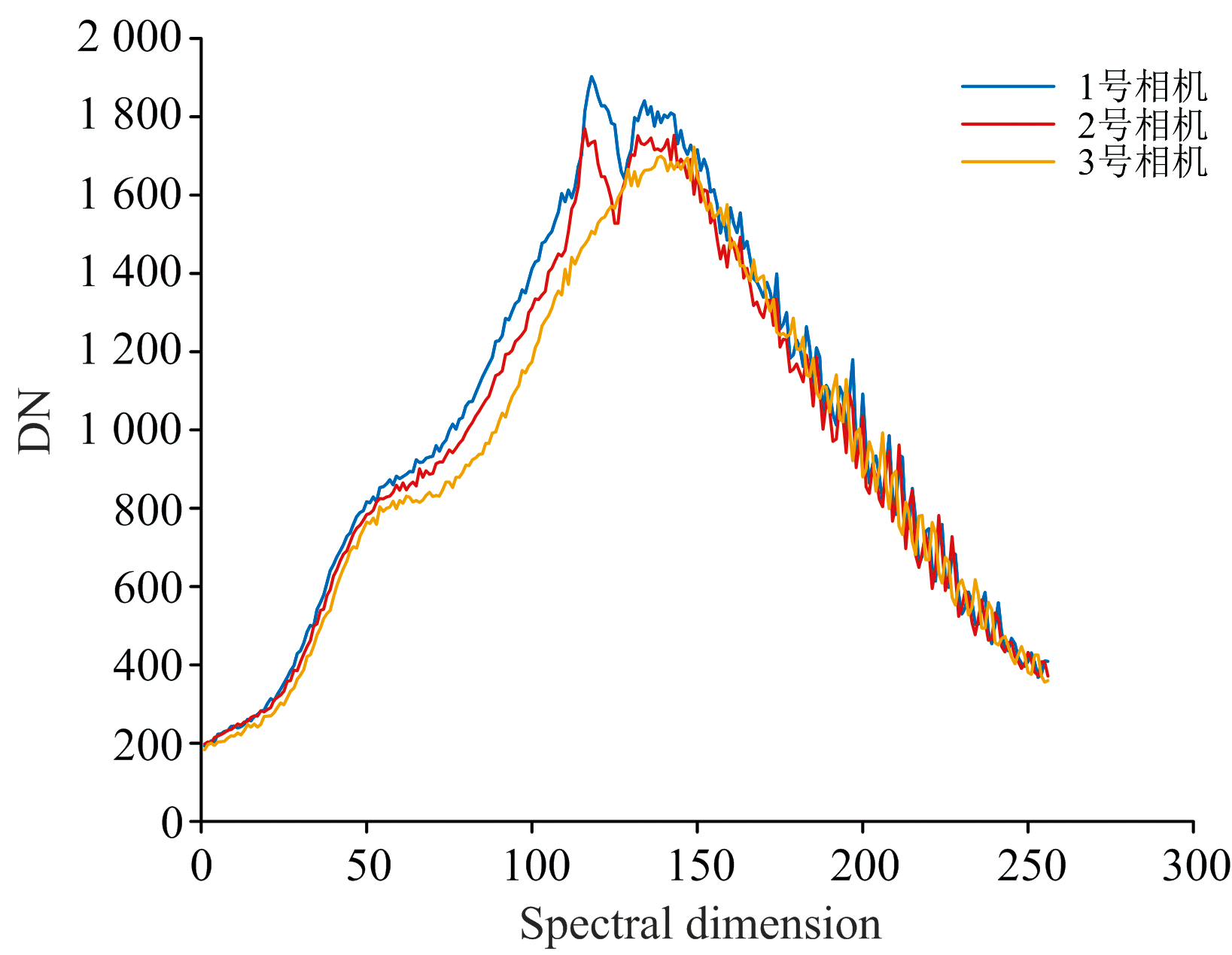 | 图5 三台相机间的非均匀性Fig.5 Non-uniformity among three imagers |
由图5, 可以看出三台相机在相同的视场位置, 在相同的光照条件下光谱响应存在差异, 即相机间存在一定的非均匀性。
对于单台高光谱相机, 根据探测器的光电响应特性, 有
式(1)和式(2)中, Mi为探测器第i个像元的输出电压, Ki为探测器第i个像元的输出响应, L为进入探测器的光照度, Bi为探测器第i个像元在无光照条件下的输出电压, Gi和Di分别是探测器第i个像元的增益和A/D转化系数, Ni为探测器第i个像元的输出响应值。
根据式(1)和式(2), 单台高光谱相机的探测器的输出响应值与进入探测器的光照具有较好的线性关系, 即有
式(3)中, ai和bi均为探测器在第i个像元的响应系数。
若探测器尺寸为NB× NS, 其中NB为光谱维行数, NS为空间维列数, 则定义探测器响应的非均匀性为是像元响应在饱和值的一半时, 像元响应值的标准差和平均值的比值[12], 即
$\text{U}=\frac{1}{\overline{{{V}_{S}}}}\times \sqrt{\frac{1}{{{N}_{B}}\times {{N}_{S}}}\overset{{{N}_{B}}}{\mathop{\underset{i=1}{\mathop \sum }\, }}\, \overset{{{N}_{S}}}{\mathop{\underset{j=1}{\mathop \sum }\, }}\, {{({{V}_{i, \text{ }\!\!~\!\!\text{ }j}}-\overline{{{V}_{S}}})}^{2}}}$ (4)
$\overline{{{V}_{S}}}=\frac{1}{{{N}_{B}}\times {{N}_{S}}}\overset{{{N}_{B}}}{\mathop{\underset{i=1}{\mathop \sum }\, }}\, \overset{{{N}_{S}}}{\mathop{\underset{j=1}{\mathop \sum }\, }}\, {{V}_{i, \text{ }\!\!~\!\!\text{ }j}}$ (5)
式(4)和式(5)中, U是图像的非均匀性, $\overline{{{V}_{S}}}$是所有像元响应值的平均值; Vi, j是第(i, j)个像元的响应值。
根据式(3)— 式(5), 对于单个高光谱相机探测器, 在探测器像元响应在饱和值的一半时, 增益与曝光时间相同的条件下, 单台相机非均匀性主要来自于不同像元的响应系数ai和bi的差异。 设n为相机编号, 为了消除单台相机的非均匀性, 需要将每台相机的所有像元响应系数统一为一组固定的系数an和bn。
对于拼接式高光谱相机, 在校正了单台相机的非均匀性后, 还需考虑不同相机间的非均匀性。 设n台高光谱相机参与拼接, 在相同光照条件下, 第n台的相机的像元平均响应是Nn, 作为基准相机的像元平均响应是Ns, 则有
式(6)中, kn是第n台相机相较于基准相机的校正系数。 因此, 获得较准确的kn值是完成不同相机间非均匀校正的关键。
首先进行单个高光谱相机的非均匀性校正。 根据式(3)— 式(5), 单个相机的所有像元响应系数an和bn应通过校正统一。 其中an和bn分别代表增益系数和偏置系数。 因此, 本算法首先通过辐射定标多段校正方法, 校正探测器各像元的增益系数和偏置系数。 具体算法如下:
选取n个不同的辐亮度作为定标点, 分别使用φ 1, φ 2, …, φ n表示。 探测器中第i个波段NS个像元的响应输出值对应的均值分别是$\overline{V\left( {{\varphi }_{1}} \right)}$, $\overline{V\left( {{\varphi }_{2}} \right)}$, …, $\overline{V\left( {{\varphi }_{n}} \right)}$, 第(i, j)处像元对应的响应值分别是Vi, j(φ 1), Vi, j(φ 2), …, Vi, j(φ n)。 第(i, j)处像元的响应值和所有像元响应值的均值之间满足以下关系
$\overline{V\left( {{\varphi }_{k-1}} \right)}={{k}_{i, \text{ }\!\!~\!\!\text{ }j}}\times {{V}_{i, \text{ }\!\!~\!\!\text{ }j}}\left( {{\varphi }_{k-1}} \right)+{{b}_{i, \text{ }\!\!~\!\!\text{ }j}}$(7)
$\overline{V\left( {{\varphi }_{k}} \right)}={{k}_{i, \text{ }\!\!~\!\!\text{ }j}}\times {{V}_{i, \text{ }\!\!~\!\!\text{ }j}}\left( {{\varphi }_{k}} \right)+{{b}_{i, \text{ }\!\!~\!\!\text{ }j}}$(8)
其中, k=2, …, n, i=1, 2, …, NS; NB是探测器的行数, 即波段数; NS是探测器的列数, 即空间维数。
探测器第(i, j)处像元的睁益和偏置分别是
${{k}_{i, j}}=\frac{\ \ \ \overline{V\left( \ {{\varphi }_{k}} \ \right)}-\overline{V\left( \ \ {{\varphi }_{k-1}} \ \ \right)}\ \ \ }{\ \ \ \ {{V}_{i, j}}\ \ \left( \ {{\varphi }_{k}} \ \right)-{{V}_{i, j}}\ \ \left( \ \ {{\varphi }_{k-1}} \ \ \right)\ \ \ }$(9)
${{b}_{i, \text{ }\!\!~\!\!\text{ }j}}=\overline{V\left( {{\varphi }_{k-1}} \right)}-{{k}_{i, \text{ }\!\!~\!\!\text{ }j}}\times {{V}_{i, \text{ }\!\!~\!\!\text{ }j}}\left( {{\varphi }_{k-1}} \right)$(10)
对于任意辐亮度φ , 第(i, j)处像元响应输出值是Vi, j(φ )。 需要判断Vi, j(φ )在$\overline{V\left( {{\varphi }_{1}} \right)}$, $\overline{V\left( {{\varphi }_{2}} \right)}$, …, $\overline{V\left( {{\varphi }_{n}} \right)}$的哪个区域内。 若满足$\overline{V\left( {{\varphi }_{k-1}} \right)}< {{V}_{i, \text{ }\!\!~\!\!\text{ }j}}\left( \varphi \right)\le \overline{V\left( {{\varphi }_{k}} \right)}$, 那么, 第(i, j)处像元响应输出值可以校正为
然后进行拼接式高光谱相机不同相机间的非均匀校正。 由图1可知, 3台参与拼接的高光谱相机中, 3号相机位于中心视场, 与1号相机和2号相机均有重叠部分, 因此选取3号相机的像元响应为基准响应。
设3台相机在空间方向推扫成像T住图像, 针对第t帧图像, 1号相机中与3号相机重叠视场为
式(12)和式(13)中,
在拼接式高光谱成像仪实际工作过程中, 当重叠视场中地面目标与非重叠视场中的地面目标光谱差异较大时, 会给算法中k13和k23值带来一定的误差干扰。 为了消除该误差, 本算法引入了一维小波多尺度分解的方法, 对k13和k23进行小波滤波修正。
一维小波多尺度分解与重构公式如式(14)— 式(16)
式中,
根据式(14)— 式(16), 选取小波基为“ sym8” , 分解层数为3, 对k13和k23分别进行一维离散小波分解, 将第三层的低频系数代入小波重构公式, 得到经过小波滤波修正后的系数K13与K23。 最后将1号相机与2号相机每个像元的响应值分别乘以K13与K23, 即可完成3台相机间的非均匀性校正。
方法流程图如图6所示。
 | 图6 算法流程图Fig.6 Steps of the method |
为了验证本算法的有效性, 选取图2中数据作为原始图像, 分别采用基于场景的非均匀性定标, 未进行小波滤波的本文方法和本文提到的基于重叠视场的混合校正方法对原始数据进行非均匀性校正。 校正结果如图7所示。
 | 图7 不同校正方法对比 (a): 基于场景的非均匀性定标校正第68波段; (b): 基于场景的非均匀性定标校正第153波段; (c): 本文方法(未进行小波滤波)校正第68波段; (d): 本文方法(未进行小波滤波)校正第153波段; (e): 本文方法校正第68波段; (f): 本文方法校正第153波段Fig.7 Results obtained through various methods (a): 68th band of scene-based non-uniformity calibration correction; (b): 153rd band of scene-based non-uniformity calibration correction; (c): 68th band of correction (without wavelet filtering) using the method proposed in this paper; (d): 153rd band of correction (without wavelet filtering) using the method proposed in this paper; (e): 68th band of correction using the method proposed in this paper; (f): 153rd band of correction using the method proposed in this paper |
从图7可以看出, 实验室单台相机定标校正一定程度上调整了图像的灰度, 但对于三台相机间的非均匀性校正效果并不明显; 基于场景的非均匀性定标校正在一定程度上校正了三台相机间的非均匀性, 由于图像整体信息复杂, 校正的同时引入了条带噪声, 对图像细节损失较严重。 本方法在校正相机非均匀性和细节的保留方面取得了良好的平衡。
为了定量化评价上述方法的校正效果, 引入了图像质量的提高系数(IF), 非均匀性(NU)与光谱角(SA)三个评价指标。
图像的IF表示图像校正前后图像质量的提高程度, 它的定义如式(17)— 式(19)
$\text{IF}=10\text{lo}{{\text{g}}_{10}}\left( \frac{\mathop{\sum }_{j}d_{R}^{2}\ \ \left[ j \right]}{\mathop{\sum }_{j}d_{E}^{2}\ \ \left[ j \right]} \right)$(19)
式(17)— 式(19)中, j是图像在推扫方向的空间位置, 一般为探测器的列数; MeanIR[j]和MeanIE[j]分别是原始图像和校正后图像在推扫方向的像元响应值的均值。 MeanI[j]是MeanIE[j]经过低通滤波之后得到的值。 IF越大, 说明图像的校正效果越好, 图像质量提高的程度越大。
图像的非均匀性(NU)定义如式(20)
$\text{NU}=\frac{1}{{{\bar{S}}}}\times \sqrt{\frac{\overset{m}{\mathop{\mathop{\sum }_{i=1}}}\, \overset{n}{\mathop{\mathop{\sum }_{j=1}}}\, {{({{S}_{i, \text{ }\!\!~\!\!\text{ }j}}-{\bar{S}})}^{2}}}{m\times n}}$(20)
式(20)中, NU是图像的非均匀性, ${\bar{S}}$是所选区域的像元响应值的均值, Si, j是第(i, j)处像元的响应值, m和n分别表示图像中的行数和列数。 NU值越大, 则说明非均匀性越大, 校正效果越差。
图像的光谱角(SA)定义如式(21)
$\text{ }\!\!\theta\!\!\text{ }=\text{co}{{\text{s}}^{-1}}\frac{\overset{n}{\mathop{\mathop{\sum }_{i=1}}}\, {{t}_{i}}{{r}_{i}}}{\sqrt{\overset{n}{\mathop{\mathop{\sum }_{i=1}}}\, t_{i}^{2}}\sqrt{\overset{n}{\mathop{\mathop{\sum }_{i=1}}}\, r_{i}^{2}}}$(21)
式(21)中, ti与ri分别是非均匀性校正前后的光谱响应, i是对应的谱段数。 光谱角度越小, 代表图像经过校正算法处理前后的光谱特性变化越小。
用上述3种指标对3种非均匀性校正方法进行评价, 评价指标计算范围见图8红色方框, 结果如表2— 表4所示。
 | 图8 评价指标的计算范围Fig.8 Range of evaluation indexes |
| 表2 不同方法的图像质量提高系数(IF) Table 2 IF of the different methods |
| 表3 不同方法的非均匀性(NU) Table 3 NU of the different methods |
| 表4 不同方法的光谱角(SA) Table 4 SA of the different methods |
从表2— 表4中的指标数据可以看出, 相较于实验室单台相机定标方法和基于场景的非均匀性校正方法, 提出的基于重叠视场的校正方法具有最好的非均匀性校正效果, 同时在最大程度上减小了图像原始信息的损失。
非均匀性校正对提高高光谱数据质量具有重要意义。 本文通过对拼接式高光谱相机实验室数据进行分析, 建立了非均匀性模型, 提出了一种基于重叠视场的拼接式高光谱相机非均匀性校正方法。 该种方法综合运用了实验室定标数据与实时飞行数据, 运用符合定标的方法校正单台相机的非均匀性, 运用相机间重叠视场计算系数的方法校正多相机间的非均匀性, 同时引入一维多重小波变换对校正系数进行了滤波处理。 实验结果证明, 相较于实验室单台相机定标方法和基于场景的非均匀性校正方法, 本文提出的基于重叠视场的拼接式高光谱相机非均匀性校正方法具有最好的非均匀性校正效果, 摆脱了需要大口径积分球光源的限制, 同时最大程度保留了光谱特性。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|