







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于多级靶标的航空多光谱相机绝对辐射定标
[崔珍珍1, 2  , 马超
, 马超1 , 张浩2, * , 张宏伟3 , 梁虎军3 , 邱文2 ]
, 马超, 张宏伟|
|


作者简介: 崔珍珍, 1993年生, 河南理工大学测绘与国土信息工程学院博士研究生 e-mail: 15738510680@163.com
基于场地的绝对辐射定标是航空遥感数据定量化应用的重要保障手段, 如何降低外场测量环境及各种测量误差的影响、 提高定标结果的稳定性和精度是航空相机定标的关键。 利用2020年12月26日—28日在云南普洱定标场布设的5种不同反射率的灰阶靶标, 采用反射率基法对机载Lecia DMC Ⅲ航空多光谱相机连续进行3次辐射定标试验。 在飞机飞越定标场上空的同时, 获取地表反射率、 大气参数和试验场内各采样点的几何信息, 利用MODerate resolution atmospheric TRANsmission(MODTRAN)5.2.1大气辐射传输模型得到遥感器入瞳处各波段的辐亮度, 然后结合影像选定区域的平均DN值, 分别采用单点法、 两点法和多点法计算得到不同的定标系数。 通过系统对比不同方法得到的定标结果并分析各种误差源, 提出了一种基于多级靶标多次观测的航空多光谱相机外场高精度绝对辐射定标的方法, 各波段的定标不确定度分别为7.24%(蓝)、 6.20%(绿)、 5.35%(红)和4.68%(近红外)。 为了验证辐射定标的结果, 通过反射率反演的方法来验证不同方法计算得到的定标系数的合理性; 利用单点法、 两点法和多点法得到不同的定标系数, 基于Atmospheric/Topographic Correction for Airborne Imagery(ATCOR 4)大气校正软件对试验场内的多种典型地物进行大气校正; 将反演的地表反射率与实测地物反射率进行对比验证。 结果表明: 多级靶标和短期多次试验对于提高定标精度非常关键, 5%、 20%和60%灰阶靶标单点定标法和单次多点定标法的定标精度相对最差, 40%灰阶靶标单点定标法和两点法的定标误差明显减小, 多次多点法的定标精度相对较高, 三类方法平均相对误差分别为10%、 5.43%和3.18%。 本文提出的基于多级靶标多次试验的航空多光谱相机定标方法, 降低了单点法、 两点法及单次试验定标的不确定性, 对于今后航空相机的外场高精度定标及航空数据的定量化应用具有较高的参考价值。
Site-based absolute radiometric calibration is an important guarantee for quantitatively application of aerial remote sensing data. The key to aerial camera calibration is to reduce the influence of field measurement environment and various measurement errors and improve the stability and accuracy of calibration results. In this paper, five gray scale tarps with different reflectance were set up at the Pu’er test site in Yunnan Province from 26th to 28th December 2020, and a reflectance-based method, which requires synchronous measurements including the surface reflectance, atmospheric parameters and geometry information when the aircraft overpass the calibration test site, was used for absolute radiometric calibration of Lecia DMC Ⅲ airborne multispectral camera. These parameters were input into the MODerate resolution atmospheric TRANsmission (MODTRAN) atmospheric radiative transfer model to obtain the spectral radiance at the entrance pupil at the aircraft height. Then, combined with the average DN of the selected area of the image, the different absolute radiometric calibration coefficients were derived for the DMC Ⅲ camera via three consecutive calibration experiments based on single-, dual- and multi-site methods. By systematically comparing the calibration results of single-, dual- and multi-site methods and analyzing various error sources, proposing a high-precision absolute radiometric calibration method based on multiple observations with multi-scale tarps. Moreover, the calibration uncertainty of each band is 7.24% (blue), 6.20% (green), 5.35% (red) and 4.68% (near infrared), respectively. In order to verify the radiometric calibration results, the reflectance inversion validation was adopted to prove the rationality of the three different calibration coefficients obtained by single-, dual- and multi-site methods. The different absolute calibration coefficients obtained by single-, dual- and multi-site methods were used to conduct atmospheric correction for various typical ground objects in the test site with Atmospheric/Topographic Correction for Airborne Imagery (ATCOR 4) atmospheric correction software, and the surface reflectance obtained by inversion was compared with the measured surface reflectance for verification. The results show that multiple experiments based on multi-scale tarps in a time are strongly critical for improving the calibration accuracy. The single-site method with 5%, 20% and 60% tarps and single multi-site for single experiment method have relatively poor calibration accuracy. The calibration errors of the single-site method with 40% tarp and dual-site method decrease obviously, while the multi-site for multiple experiments method has relatively high calibration accuracy. The average relative errors of the three methods are 10%, 5.43% and 3.18%, respectively. The calibration method of aerial multispectral camera based on multiple experiments with multi-scale tarps put forward in this paper reduces the calibration uncertainty of single-site method, dual-site method and single experiment, which has the high reference for the high-accuracy site-based calibration of aerial cameras and the quantitative application of aerial data in the future.
遥感数据的应用水平不仅取决于传感器的设计与性能, 更取决于数据的定量化水平[1]。 近年来, 随着遥感科学的迅猛发展和遥感应用程度的不断深入及应用范围的空前拓展, 定量化遥感已然成为当今遥感发展最重要的方向之一。 辐射定标是将传感器记录的无量纲的数字DN值转换成具有实际物理意义的大气顶层辐射亮度或反射率的过程, 建立了数字量化值与对应视场中辐射亮度值之间的定量关系[2]。 辐射定标是遥感数据定量处理和应用的首要保障和基本前提, 在实现原始遥感数据和地球物理参数之间转化的过程中具有至关重要的作用和无可替代的地位, 辐射定标的精度直接影响着数据后续的定量化应用水平[2, 3]。
常见的光学遥感器在轨绝对辐射定标方法有反射率基法、 辐照度基法和辐亮度基法, 这些方法在基于大面积均匀场地的在轨替代定标中发挥着重要作用。 随着光学遥感器空间分辨率的不断提高, 使得基于光谱均一、 朗伯性好的灰阶靶标的绝对辐射定标成为可能[4]。 反射率基法作为目前使用最广泛的场地定标法, 在可见光和近红外波段具有较高的精度, 已广泛应用于传感器的校准[5]。 该方法早在20世纪80年代就已用于对Landsat-5/TM的辐射定标[6, 7], 之后也成功应用在其他卫星传感器上, 如Landsat-7/ETM+[8]、 SPOT/HRV[9]和MODIS[10]等的在轨辐射定标。 20世纪末, 我国建立的甘肃敦煌定标场和青海湖水面辐射校正场, 成功地实现了对我国的风云卫星[11]、 资源卫星[12]、 环境卫星[13]和SPARK卫星[14]等星载传感器的绝对辐射定标工作, 促进了国产系列卫星在轨辐射定标及数据定量化应用的发展。
航空光学相机是应用最早和最为广泛的航空遥感载荷[15], 通常用于测绘制图和三维模型的构建, 最早只关注相机的几何特性[16]。 但最近几年来, 随着定量遥感的迅猛发展, 人们对这类相机的辐射特性也逐渐重视起来, 这意味着航空光学相机需要更高的校准精度。 为此, 国内外均建立了一批用于航空相机的几何与辐射综合试验场。 其中, 国外的有美国的Madison航空定标场[17]、 德国的Vaihingen/Enz航空定标场[18]和芬兰的Sjö kulla航空定标场[19, 20]等; 国内的有河南嵩山遥感地面定标场[21, 22]、 河南安阳航空相机综合试验场[23]和内蒙古包头高分辨遥感综合定标场[24]。 国内外的学者们基于这些定标场做了大量实验, 并根据获取的数据对传感器的辐射性能进行了研究。 航空遥感外场定标通常采用反射率基法[2], 陈伟等[25]基于内蒙古包头定标场的固定靶标, 采用反射率基法对机载宽视场多光谱相机进行了场地绝对辐射定标, 定标不确定度为5.19%, 但是未对定标结果进行验证。 如赵航等[16]利用8种不同反射率的固定靶标, 采用反射率基法在安阳定标场进行了绝对辐射定标试验, 并分别用单点法、 两点法和多点法计算得到了多组不同的定标系数; 结果表明, 单点法引起的误差最大, 两点法和多点法反演误差明显降低, 其中多点法精度最高, 平均相对误差为11.86%, 但是也未计算定标不确定度。 以上研究均基于辐射定标场, 采用反射率基法成功实现了对航空机载相机的外场绝对辐射定标, 但是大部分研究采用的靶标参照不够, 且都是仅对定标场一次成像, 结果存在一定的不确定性。
DMC Ⅲ 相机作为具备高分辨率、 高精度航空遥感能力的航空数码相机中最年轻有力的成员, 自推出便备受关注[26], 其具备的测绘制图及三维模型构建等已不满足当前的用户需求, 人们更期待利用其获得高精度的遥感专题产品, 进而实现遥感定量化, 前提便是高精度的辐射定标。 鉴于此, 本文基于云南普洱试验场布设的5种不同反射率(标称反射率分别为5%、 20%、 40%、 60%和80%)的灰阶靶标, 对Lecia DMC Ⅲ 多光谱相机进行了多次试验, 并于2020年12月26日— 28日连续3次成功成像。 利用反射率基法, 分别采用单点法、 两点法和多点法得到DMC Ⅲ 相机各波段的绝对辐射定标系数, 实现了对DMC Ⅲ 多光谱相机的绝对定标, 并利用试验区周围的典型地物对定标结果进行了反射率反演精度验证。
采用反射率基法[27]对DMC Ⅲ 相机进行外场绝对辐射定标。 有研究表明在气溶胶光学厚度较小的晴朗天气下, 反射率基法和辐照度基法的定标精度相当[28], 因此选用反射率基法进行辐射定标。 反射率基法需要在飞机过顶时同步测量地表反射率和大气参数, 然后利用大气辐射传输模型模拟计算得到传感器各通道入瞳处的辐亮度, 并与影像上选定区的平均DN值相比, 即可得到传感器各通道的绝对辐射标定系数。 采用MODTRAN 5.2.1大气辐射传输模型进行辐射传输模拟计算, 反射率基法绝对定标原理如式(1)所示, 通过式(2)可以转换得到表观辐亮度。
式中, ρ a为大气程辐射反射率, ρ t为地表反射率, s是半球反照率, T(θ s)和T(θ v)分别为太阳方向和观测方向的总透过率, θ s为太阳天顶角, θ v为传感器观测天顶角, φ v-s是观测方位角与太阳方位角的相对夹角, ρ * 和L分别为传感器入瞳处的表观反射率和表观辐亮度, E0为大气层顶的太阳辐照度, d为日地距离, 单位为AU。
分别采用单点法、 两点法和多点法进行绝对辐射定标, 根据1.1节中的方法计算得到表观辐亮度后, 结合影像对应区域的平均DN值, 即可计算得到DMC Ⅲ 相机各波段不同方法对应的辐射定标系数。
由于相机参数设置原因, 导致12月26日— 28日80%灰阶靶标蓝、 绿、 红波段的DN值以及12月27日— 28日60%灰阶靶标红波段的DN值出现饱和现象(图1), 因此这部分饱和值被剔除, 不参与定标系数的计算。 由于本次试验期间相机在12月26日— 28日连续三次成功成像, 为了提高定标精度, 将3次的数据联合计算。
 | 图1 所有灰阶靶标各波段的辐亮度与DN值的关系Fig.1 The relationship between the radiance and the DN value of all gray scales and each band |
其中, 单点法是分别利用标称反射率为5%、 20%、 40%、 60%的灰阶靶标, 假设暗电流为零时, 根据式(3)计算定标系数。
式(3)中, L为DMCⅢ 相机入瞳处的表观辐亮度, 单位为W· (m2· sr· μ m)-1, 为选定区域的平均DN值, a为定标系数, 单位为W· (m2· sr· μ m· DN)-1。
两点法是利用标称反射率为5%和60%的灰阶靶标, 根据式(4)计算定标系数。
式中, L为DMCⅢ 相机入瞳处的表观辐亮度, 单位为W· (m2· sr· μ m)-1, DN为选定区域的平均DN值, a为增益, 单位为W· (m2· sr· μ m· DN)-1, b为偏置, 单位为W· (m2· sr· μ m)-1。
多点法定标是利用标称反射率为5%、 20%、 40%和60%的灰阶靶标, 根据式(4)计算得到相机各波段的绝对辐射定标系数; 另外, 为了排除单次定标的不确定性, 还利用多点法分别计算了12月26日、 27日和28日这三天的定标系数。
不确定度采用相对误差来表示, 根据式(5)计算每项误差对定标系数的不确定度ε , L0为参考等效辐亮度, L1为改变输入条件后的等效辐亮度, 总体不确定度用各项误差不确定度的平方和的平方根来表示[14]。
试验场地位于普洱思茅机场, 地处滇西南无量山东南麓, 澜沧江以东。 平均海拔高度大于1 km, 场地面积大于50 m× 50 m, 地势平坦, 无植被覆盖, 大气干洁、 无污染。
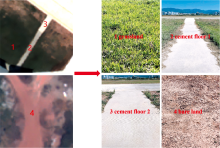
灰阶靶标采用湿法PU革制作, 具有光谱平坦性好、 遥感器观测视场范围接近理想朗伯体、 反射率覆盖相机动态范围等特点。 2020年12月26日— 28日在该场区铺设灰阶靶标, 靶标布设示意图及现场图如图2所示, 依次按照5%、 60%、 20%、 80%和40%的顺序布设靶标, 靶标铺设超过5× 5像元, 计算时取图像中心3× 3像元范围内的平均DN值, 以避免混合像元的影响。
 | 图2 靶标铺设示意图Fig.2 Schematic diagram of tarps laying |
DMC Ⅲ 相机是Lecia公司在2016年发布的DMC系列中的最新款相机, 是一款专门用于高分辨率、 高光谱、 高精度航空摄影测量的面阵数码相机[29]。 相比传统的航空摄影测量相机, DMC Ⅲ 相机通过使用新型的Complementary Metal-Oxide-Semiconductor(CMOS)成像传感器使得其相幅提高到26 112× 15 000像素, 这是目前国际上单传感器所能达到的最大相幅, 比普通传感器高出25%, 极大地提升了航测效率。 DMC Ⅲ 相机的基本参数见表1。
| 表1 DMC Ⅲ 基本参数表 Table 1 Basic parameters of DMC Ⅲ camera |
DMC Ⅲ 相机拥有1个高分辨率(全色波段)镜头和4个低分辨率(红、 绿、 蓝、 近红外)镜头, 并且具有配套的数据处理软件— Hxmap, 用于数据的解码、 调色和影像输出等[30]。 本工作仅对蓝、 绿、 红和近红外4个波段进行辐射定标, DMC Ⅲ 相机及其光谱响应函数见图3。
 | 图3 DMC Ⅲ 相机及其光谱响应函数 (a): DMC Ⅲ 相机示意图; (b): 光谱响应函数Fig.3 DMC Ⅲ camera and its spectral response function (a): Diagram of DMC Ⅲ camera; (b): Spectral response function |
2020年12月在试验区铺设灰阶靶标对DMC Ⅲ 相机进行了多次定标试验, 并于12月26日— 28日连续3次成功成像。 航空飞行高度约为4670 m, 相机多光谱谱段图像的空间分辨率约为0.62 m。
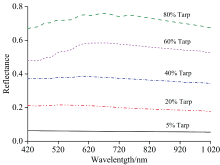
地面光谱测量采用ASD FieldSpec 4地物光谱仪(以下简称ASD)。 为测量靶标反射率, 需分别测量参考白板光谱和靶标光谱。 在相机过顶前后, 多次测量靶标光谱, 并在多个位置进行多次测量, 以减小随机误差的干扰, 12月26日— 28日试验场5块灰阶靶标的平均反射率光谱曲线如图4所示。
 | 图4 试验场各靶标反射率Fig.4 Reflectances of different gray-scale tarps in test field |
为了验证定标结果的精度, 在12月28日的飞机过顶的试验中还测量了试验场周围的草地、 水泥地和裸地的反射率光谱作为参照(图5)。
 | 图5 验证地物的反射率Fig.5 Reflectance spectra of verification features |
大气参数测量仪器采用国际上通用的太阳分光光度计CE318。 采用改进的Langley法进行气溶胶光学厚度和水汽含量的反演[31], 实验期间550 nm气溶胶光学厚度及水汽含量变化如图6所示。 12月26日— 28日这3天飞机过顶定标场的时间分别为14:25、 14:04和13:44, 对过境时刻前后5 min内的数据求均值, 得到对应过境时刻的550 nm气溶胶光学厚度分别为0.084、 0.066和0.032; 对应过境时刻的水汽含量分别为1.012、 0.906和0.720 g· cm-2。 采用Aura卫星OMI反演的Level 3级臭氧数据产品(https://acdisc.gsfc.nasa.gov/data/Aura_OMI_Level3/OMDOAO3e.003/2020)作为飞机过境时刻的臭氧含量, 这3天的臭氧含量分别为254.9、 246.3和255.6 DU。
 | 图6 12月26日— 28日 550 nm气溶胶光学厚度及水汽含量Fig.6 Aerosol optical depth at 550 nm and water vapor content from December 26th to 28th |
采用MODTRAN 5.2.1模型进行辐射传输计算, 将测量的地表反射率、 传感器光谱响应函数、 550 nm气溶胶光学厚度、 水汽含量、 臭氧及成像几何等参数输入辐射传输模型, 同时将Angstrom指数作为输入, 约束原有辐射传输模型中默认气溶胶类型的波段散射特性, 进而得到DMC Ⅲ 相机各波段的表观辐亮度。 选择影像上每块靶标中心3× 3像元大小的区域, 计算其对应的平均DN值。 分别利用单点法、 两点法和多点法计算得到DMCⅢ 相机各波段的绝对辐射定标系数(表2)。
| 表2 单点法、 两点法和多点法的绝对定标系数结果 Table 2 Absolute calibration coefficients obtained by single-, dual- and multi-site methods |
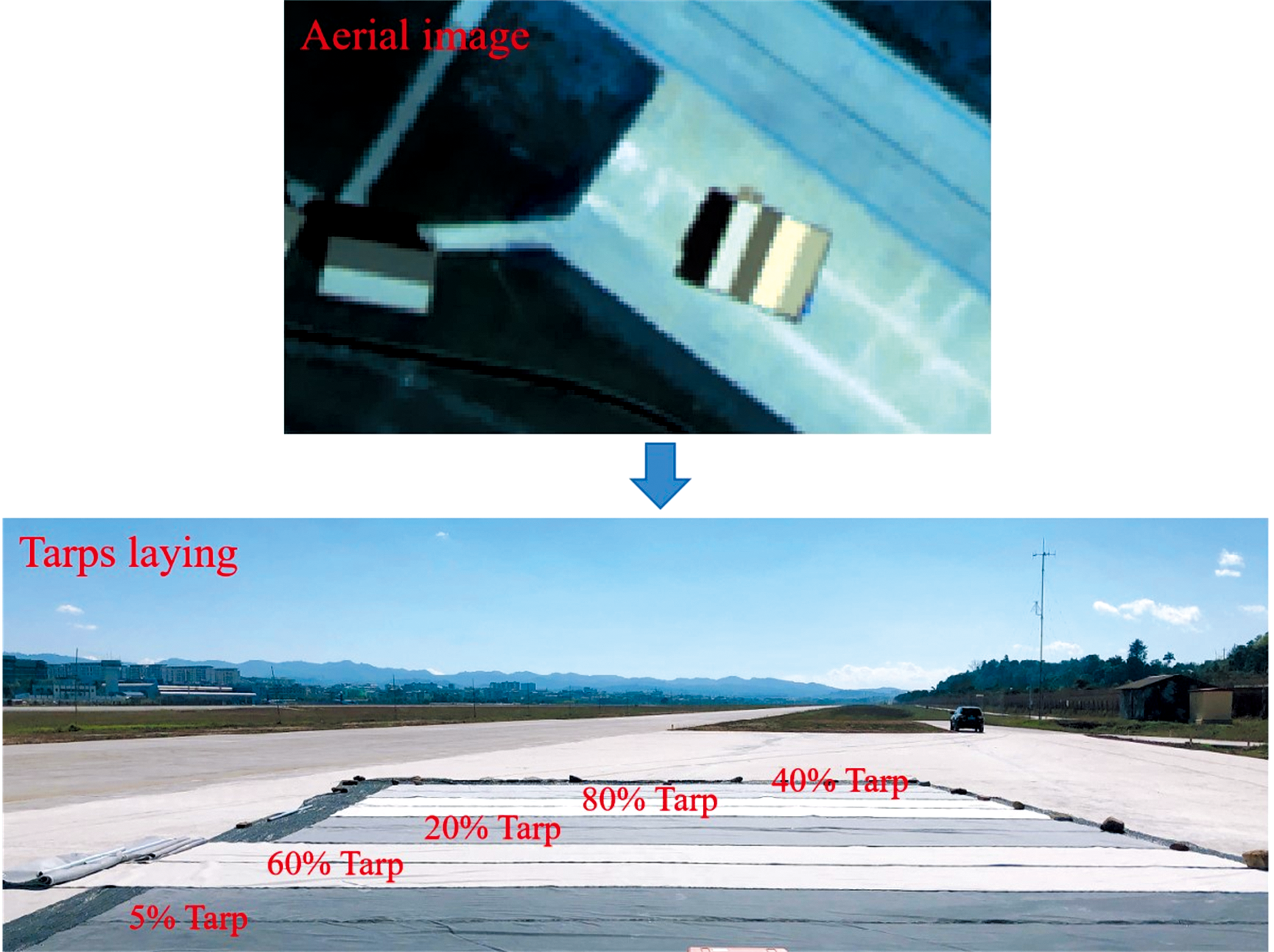
在反射率基法的可见光近红外多光谱相机场地绝对辐射定标过程中, 引起辐射定标系数误差的原因主要包括气溶胶模型假设误差、 大气模式假设误差、 反射率测量误差、 气溶胶光学厚度测量误差、 水汽测量误差和辐射传输模型固有误差, 模拟上述各种误差条件下DMC Ⅲ 相机入瞳处波段等效辐亮度, 然后根据式(5)计算每项误差对定标系数的不确定度。
为了确定气溶胶类型的不确定性, 以城市型气溶胶模型模拟的结果为参考值, 对比乡村型气溶胶模拟的结果, 比较这两种结果的相对误差, 得到DMC Ⅲ 相机各波段气溶胶模型假设误差的不确定度[图7(a)]。
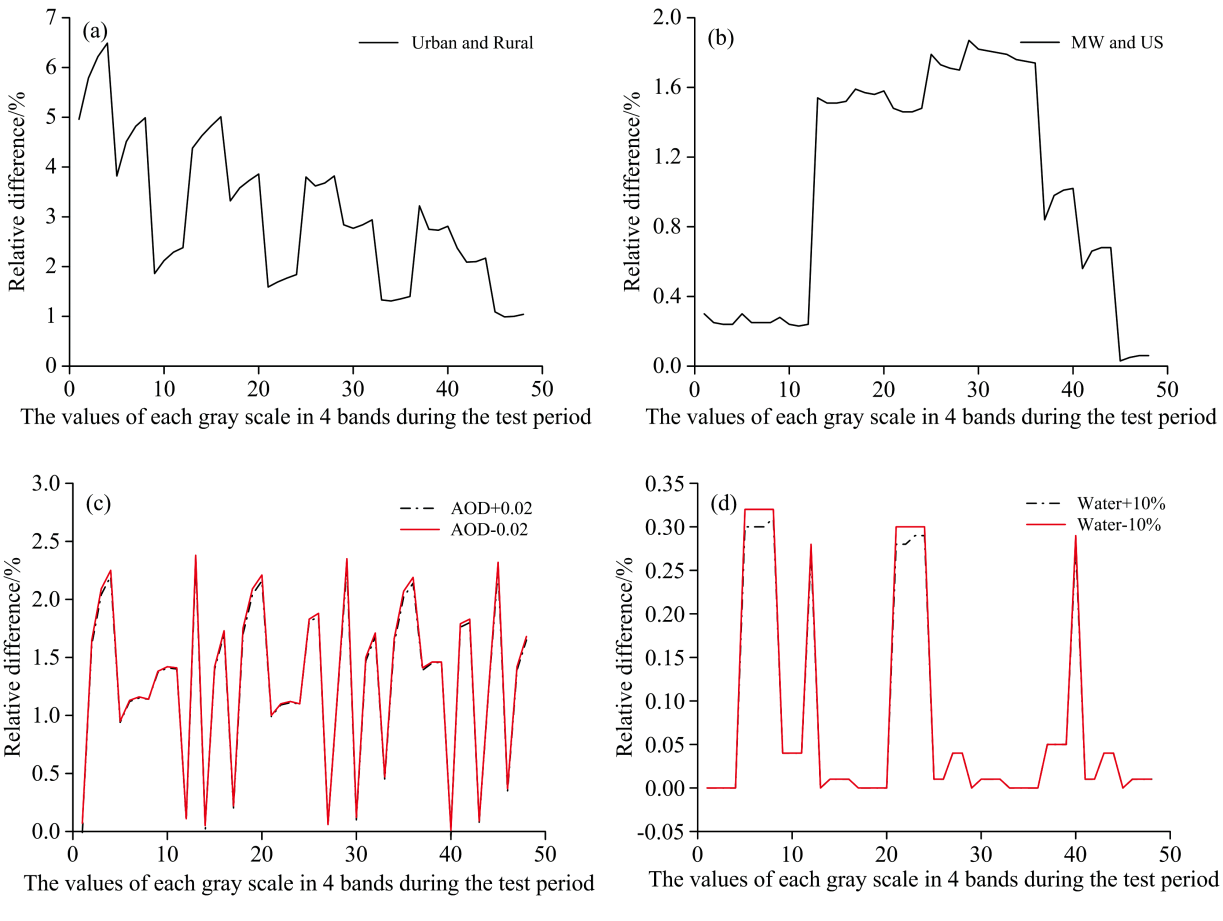 | 图7 反射率基法的各项误差源 (a): 气溶胶模型假设误差; (b): 大气模式假设误差; (c): 气溶胶光学厚度测量误差; (d): 水汽测量误差Fig.7 Uncertainty sources of reflectance-based method (a): Assumption of aerosol type; (b): Assumption of atmospheric model; (c): AOD retrieval; (d): Water vapor retrieval |
由于没有实验测量大气廓线数据, 为了评估大气模式对定标的影响, 以中纬度冬季大气模式的模拟结果为参考, 与1976年美国标准大气模式的结果作对比得到DMC Ⅲ 相机各波段大气模式假设误差的不确定度[图7(b)]。
反射率基法绝对定标需要同步测量地表反射率, 反射率作为MODTRAN模拟的输入项, 其精度直接影响着辐射传输的精度, 2020年12月26日— 28日分别测量了试验区内各靶标的反射率。 国内外从事定标的专业人员认为地面反射率测量的误差约为2%[14, 25, 32, 33], 因测量规范与仪器水平与其相似, 故将此次地表反射率测量误差导致的不确定度设置为2%。
AOD是从CE318数据中反演得到的, 总不确定度为0.01~0.021[34]。 通过人为增加气溶胶光学厚度± 0.02, 计算得到气溶胶光学厚度测量误差导致的不确定度[图7(c)]。
水汽含量是利用CE318测量的数据反演得到的, 水汽含量反演的误差在10%内。 MODTRAN5模拟时, 水汽含量作为输入项, 在增加水汽含量± 10%的基础上, 计算得到水汽含量测量误差导致的不确定度[图7(d)]。
MODTRAN 5的精度已提高很多, 保守估计其不确定度为1%[7]。
综上所述, DMC Ⅲ 多光谱相机反射率基法定标各波段的不确定度分别为7.24%(蓝)、 6.20%(绿)、 5.35%(红)和4.68%(近红外), 不确定度分配如表3所示。
| 表3 反射率基法绝对定标不确定度 Table 3 Absolute calibration uncertainty of reflectance-based method |
通过反射率反演的方法[3]来验证单点法、 两点法和多点法得到的定标系数的合理性。 利用这3种方法得到的不同绝对定标系数, 采用ATCOR 4大气校正软件对DMC Ⅲ 相机云南普洱试验场所在影像进行大气校正, 得到反演后的地表反射率。 以试验场内的草地、 水泥地和裸土为例(图8), 分别用不同定标系数反演后得到的地表反射率与实测的地表反射率对比来验证定标系数的精度。
 | 图8 验证地物在影像上的位置及实地测量照片Fig.8 Location and photos of verification features |
图9为单点法、 两点法和多点法对草地、 水泥地和裸地的验证结果, 其中纵坐标表示经辐射定标和大气校正反演后得到的影像各波段的反射率, 横坐标表示地面实测的反射率与光谱响应函数卷积后各波段的等效反射率。 图中的y=x为参考线, 图中的点越接近这条线, 说明实测的反射率与图像反演后的反射率越接近, 即定标系数的精度越高。 同时还对图中的所有点进行了线性拟合, 得到了线性拟合方程表达式及拟合优度R2, R2越大表明拟合程度越高; 并计算了每种定标方法验证结果的均方根误差(root mean square error, RMSE), RMSE越小, 表明该种定标方法的精度越高。
 | 图9 定标系数验证结果 (a): 单点法— 5%灰阶靶标; (b): 单点法— 20%灰阶靶标; (c): 单点法— 40%灰阶靶标; (d): 单点法— 60%灰阶靶标; (e): 两点法— 5%和60%灰阶靶标; (f): 多点法— 12月26日; (g): 多点法— 12月27日; (h): 多点法— 12月28日; (i): 多点法— 12月26日— 28日Fig.9 Validation results of absolute calibration coefficients (a): Single-site method— 5% tarp; (b): Single-site method— 20% tarp; (c): Single-site method— 40% tarp; (d): Single-site method— 60% tarp; (e): Dual-site method; (f): Multi-site method— 26 December; (g): Multi-site method— 27 December; (h): Multi-site method— 28 December; (i): Multi-site method— 26 to 28 December |
由图9可以看出, 对于单点法定标来说, 图中各点与y=x的接近程度为: 40%灰阶靶标> 60%灰阶靶标> 20%灰阶靶标> 5%灰阶靶标, 拟合优度R2的大小为: 40%灰阶靶标(0.997 6)> 60%灰阶靶标(0.994 5)> 20%灰阶靶标(0.992 7)> 5%灰阶靶标(0.927 0), RMSE大小为: 5%灰阶靶标(0.079 0)> 20%灰阶靶标(0.036 3)> 60%灰阶靶标(0.022 3)> 40%灰阶靶标(0.016 2)。 可以看出不同灰阶靶标单点法定标的精度有高有低, 其中5%靶标单点定标的定标系数误差最大, 这是因为5%的靶标本身反射率低, 引入的误差较大; 20%灰阶靶标和60%灰阶靶标单点定标的误差有所减小, 二者定标结果较为接近; 40%灰阶靶标单点定标的精度相对最高, 这是因为40%灰阶靶标为中等亮度, 与靶标周边地物反射率更接近(图10), 因此40%灰阶靶标单点定标的误差相对其他灰阶靶标单点定标的误差更小。 两点法的定标精度相对单点法有所减小, 略高于40%灰阶靶标单点定标的精度。 对于多点法来说, 单次多点定标的精度接近于20%灰阶靶标和60%灰阶靶标单点定标的结果; 多次多点定标的精度在所有方法中最高(与y=x的接近程度最高, R2最大: 0.998 3, RMSE最小: 0.005 9), 能够消除单次试验、 单级靶标定标的不确定性。 总体来说, 40%灰阶单点定标、 两点法、 多次多点法均能较好的反演地表反射率, 其中多次多点法反演的精度最高。
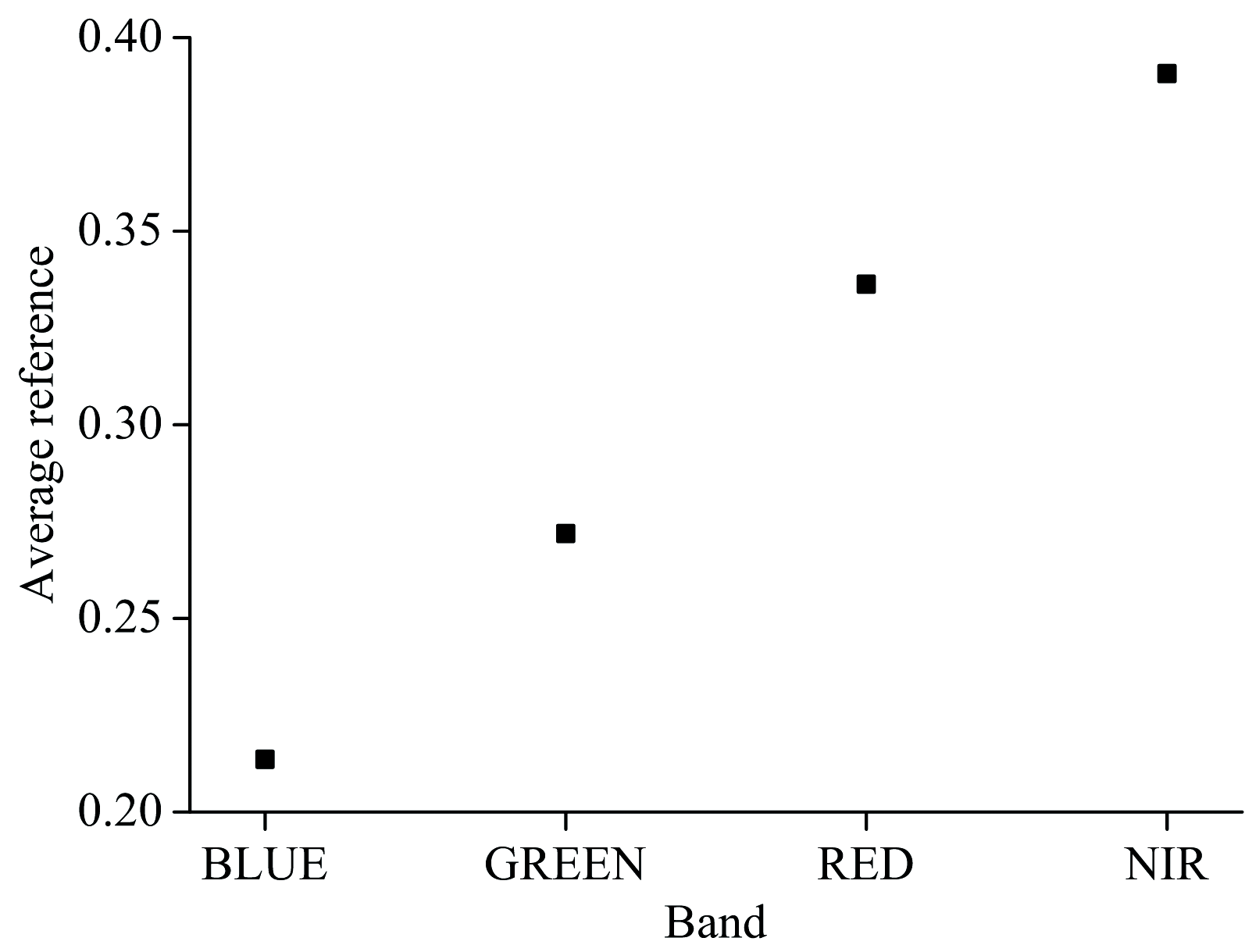 | 图10 靶标周围(30 m× 30 m)地物平均反射率Fig.10 Average reflectance of objects around the tarps (30 m× 30 m) |
为了进一步定量化验证不同方法的定标精度, 采用式(5)计算各种定标方法的相对误差, 结果见表4。 可以看出, 单点法定标和单次多点定标得到的定标系数反演的误差最大, 这两种方法的平均相对误差较为接近, 基本都大于10%; 两点法反演的误差明显降低, 平均相对误差为5.43%; 多次多点法反演的误差最小, 平均相对误差为3.18%。 综上所述, 利用反射率基法对DMC Ⅲ 多光谱相机进行绝对辐射定标时, 采用多级靶标多次成像方法计算得到的绝对辐射定标系精度最高。
| 表4 反射率反演验证的相对误差 Table 4 Relative error of reflectance inversion validation |
系统研究了航空光学多光谱相机外场绝对辐射定标方法和误差来源, 提出了一种基于多级靶标多次观测的外场高精度绝对辐射定标方法。 利用云南普洱试验场布设的5种不同反射率的灰阶靶标, 采用反射率基法对机载Lecia DMC Ⅲ 多光谱光学相机进行绝对辐射定标, 以2020年12月26日— 28日连续3次成像的数据为基础, 根据单点法、 两点法和多点法分别计算得到不同的定标系数, 并利用试验场周围多种典型地物进行反射率反演精度验证, 实验结果证明了单点法、 两点法和单次多点法的定标精度无法得到稳定的保障, 多级靶标和短期多次试验是提高航空外场定标精度的关键。 具体结论如下:
(1)利用反射率基法对机载航空相机进行绝对辐射定标时, 总体不确定度介于2.45%~7.47%之间; 采用ATCOR 4大气校正软件对不同方法得到的定标系数进行精度验证, 5%、 20%和60%灰阶靶标单点定标法和单次多点法的定标精度相对较差, 40%灰阶靶标单点定标法和两点法的定标误差明显减小, 多次多点法的定标精度相对较高, 三类方法平均相对误差分别为10%、 5.43%和3.18%。 基于外场的航空遥感辐射定标的最大误差源主要是气溶胶模型假设误差和气溶胶光学厚度测量误差, 建议选择晴朗且能见度较高的天气进行定标, 以提高定标精度。
(2)航空外场实验不确定性因素较多, 单次试验单点定标及两点定标会引起定标结果较大的不确定性。 建议在条件允许的情况下, 采用多级靶标多次实验对航空相机进行定标, 以消除各种因素带来的不确定性, 提高航空定标精度; 如果因客观条件所限, 无法实现多级靶标布设, 在天气条件理想的情况下, 可以考虑仅用中等反射率(40%~50%)的灰阶靶标进行定标。
(3)由于试验是在气溶胶光学厚度较小(550 nm AOD< 0.1)的晴朗天气下进行的, 并且在短时间内多次成功成像, 实验条件较为理想。 如果试验期间大气能见度不理想, 则需要同步测量漫总比数据, 来降低气溶胶型假设引起的漫射透过率误差; 或者通过适当调整飞机起降高度来减少大气误差, 进而提高定标精度。
(4)由于实验相机参数设置问题, 导致影像上80%灰阶靶标的DN值出现饱和。 今后应根据实验当日天气的实际情况设置合适的曝光参数, 保障各种反射率等级的地物均能有效成像。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
|
| [30] |
|
| [31] |
|
| [32] |
|
| [33] |
|
| [34] |
|