





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
中红外差分吸收激光雷达探测苯气体浓度
[段明轩1  , 李仕春
, 李仕春1, 2, * , 刘家辉1 , 王怡1 , 辛文辉1, 2 , 华灯鑫1, 2, * , 高飞1, 2 ]
, 李仕春, 刘家辉, 高飞|
|


作者简介: 段明轩, 1999年生, 西安理工大学机械与精密仪器工程学院硕士研究生 e-mail: dmxdyx2022@163.com
苯作为挥发性有机化合物(VOCs)的重要组成部分, 其大气污染状况日益引起人们的关注, 中红外波段通常是分子的基频指纹吸收区, 已成为痕量气体检测的重要波段, 而差分吸收激光雷达是探测大气痕量气体的重要手段, 故针对区域性苯浓度实时遥感问题, 提出基于中红外带间级联激光器(ICL)的探测大气苯浓度路径积分型差分吸收(IPDA)激光雷达系统。 首先, 在分析IPDA激光雷达的探测原理的基础上, 构建了IPDA激光雷达的反演算法及其误差分析模型。 其次, 详细分析来自HITRAN数据库的中红外3 100 cm-1附近苯以及主要干扰气体(如HCl, CH4和H2O)的吸收光谱, 结合HCl和CH4着重考虑了H2O对探测结果的影响, 选择IPDA激光雷达的测量波长和参考波长分别为3 090.89和3 137.74 cm-1。 再次, 基于两个连续波ICL, 设计了探测大气苯浓度IPDA激光雷达系统, 并可通过控制温度和驱动电流调谐激光器的输出波长, 使其波长分别稳定在强吸收谱区和弱吸收谱区, 并设计了基于中红外衍射光栅的光谱分光子系统, 以实现双波长接收信号的同步探测。 最后, 基于标准大气模型, 仿真分析了不同路径长度、 能见度和水汽浓度情况下激光雷达的探测性能, 并搭建中红外波段检测气体池开展了测试实验, 以验证该IPDA激光雷达系统的可行性。 仿真及实验结果分析表明, 当大气能见度为5 km, 水汽浓度低于0.4%时, 苯的浓度路径积(CL)在0.1~24 mg·m-3·km范围内探测的相对误差优于10%, 而苯的CL为5 mg·m-3·km时探测相对误差优于1%; 初步实验测试了中外红波段差分吸收激光雷达探测的线性相关系数 R2约为98.7%。
, LI Shi-chun, LIU Jia-hui, GAO FeiBenzene is an important component of volatile organic compounds (VOCs), and its pollution of the atmosphere has attracted increasing attention. The mid-infrared band is usually the fundamental frequency fingerprint absorption region of molecules, so it has become an important band for detecting trace gas molecules. Moreover, the differential absorption lidar is an important means of detecting atmospheric trace gases. Therefore, aiming at the problem of real-time remote sensing of regional benzene concentration, an integral path differential absorption (IPDA) lidar for detecting atmospheric benzene concentration based on inter-band cascade lasers (ICLs) is proposed. Firstly, we construct the retrieval algorithm of IPDA lidar and its error analysis model based on analyzing the detection principle of IPDA lidar. Secondly, the absorption spectra of benzene and major interfering gases (such as HCl, CH4 and H2O) near the mid-infrared vicinity region of 3 100 cm-1 from the HITRAN database are analyzed in detail. By considering comprehensively the influence of HCl, CH4 and H2O on the detection results, the measurement wavelength and reference wavelength of the IPDA lidar are selected to be 3 090.89 and 3 137.74 cm-1 respectively. Thirdly, we designed an IPDA lidar for detecting atmospheric benzene concentration based on two continuous-wave ICLs. The output wavelengths of these ICLs can be tuned by controlling the temperature and driving curren, so that their wavelengths can be stabilized in the strong absorption spectrum region and the weak absorption spectrum region respectively. And then, a spectroscopic system with a mid-infrared diffraction grating as the core is designed to realize synchronous detection of dual-wavelength receiving signals. Finally, combined with the mid-latitude standard atmospheric model, the performance of lidar under the conditions of different visibilities, path lengths, and water vapor concentrations is analyzed and discussed. And then, we carry out test experiments by building a mid-infrared band detection gas cell to verify the feasibility of the IPDA lidar. These results from simulations and experiments show that the relative error of benzene concentration is less than 10% within the concentration-path length product (CL) range of 0.1~24 mg·m-3·km, and the relative error of detection is better than 1%, while the CL of benzene is 5 mg·m-3·km, under the condition of atmospheric visibility of 5 km, and the water vapor concentration of less than 0.4%; and that the linear correlation coefficient R2 of differential absorption lidar detection in the mid-infrared band is about 98.7% by preliminary experiments.
苯是大气中挥发性有机化合物(VOCs)的重要组成部分, 是臭氧与气溶胶颗粒物的重要前体物[1], 车辆尾气、 焚烧、 工厂排放以及试剂的使用与蒸发是已知的主要人为来源。 苯能够通过人体裸露在外的皮肤或者呼吸道感染进入人体, 对人体身体状况有很大的危害, 并且有Ⅰ 类致癌作用[2]。 在大气中, 苯的浓度通常较低, 一般约为35 μ g· m-3, 但是, 在重度污染区可高达3.5 mg· m-3 [3]。 因此, 为加快大气苯污染的治理工作[4], 研究区域性苯浓度实时遥感技术显得尤为重要。 在分析路径积分型差分吸收(IPDA)激光雷达的探测原理的基础上, 我们提出并构建了IPDA激光雷达的反演算法及其误差分析模型。
苯的传统检测方法主要有气相色谱-质谱法和电离-质谱法, 这两种方法均具有高灵敏度和可检测多物种的优势[5], 但是, 通常适合单点位采样监测, 并不适合区域性苯浓度实时遥感监测。 而差分吸收激光雷达因其采用遥感探测手段, 具有灵敏度高、 探测距离远和分辨率高等优点, 被广泛应用于大气痕量气体探测领域, 如安徽光机所的叶凯迪等利用苯的紫外吸收波段, 开展了宽谱光源的差分吸收技术研究[6], 受限于大气紫外波段的强消光特性, 通常遥感距离有限。 而中红外光谱通常是分子最强的基频指纹吸收区, 而且该波段大气的消光影响较小, 成为痕量气体分子监测的重要波段, 但目前大多数痕量气体探测的差分吸收激光雷达系统激光器工作波长在紫外波段[7]、 可见光[8]以及近红外波段[9], 中红外的差分吸收激光雷达相对较少[10], 这是由于差频相干激光系统(如染料激光器)和光学参量振荡器(optical parametric oscillator, OPO)等中红外激光器都存在系统复杂、 成本高的问题[11], 而带间级联激光器(inter-band cascade laser, ICL)属于半导体分布式激光器, 其激射波长由量子阱层厚度决定, 而不限于增益介质能级, 故可覆盖分子基频指纹吸收波长范围3~6 μ m, 适用于痕量气体监测[12]。 尽管中红外波段已成为目前新型痕量气体遥感的研究热点[13, 14], 但是探测苯气体的中红外差分吸收激光雷达尚未报道。
基于差分吸收光谱分析技术, 首先探讨路径积分型差分吸收(integral path differential absorption, IPDA)激光雷达的探测原理, 并构建其反演算法及其误差分析模型。 其次, 基于带间级联激光器激射波长可定制且可调谐的优势, 以中红外衍射光栅为核心构建光谱分光系统, 设计探测苯浓度的中红外IPDA激光雷达系统, 并考虑主要干扰气体, 选择合适的工作波长。 最后, 仿真分析探测积分路径上大气中的平均苯浓度, 探讨积分路径、 能见度以及水汽等因素对IPDA激光雷达探测信噪比及测量相对误差的影响规律, 并开展室内苯气体浓度探测实验, 以验证系统的可行性。
IPDA激光雷达由发射系统向硬目标发射波长相差不大的两束激光, 接收经过大气衰减、 硬目标反射再衰减的回波信号, 与基于后向散射的廓线式差分吸收激光雷达不同, IPDA激光雷达不能反映目标气体的廓线信息, 只能探测光束路径上目标气体的平均浓度, 但具有更高的信噪比和更低的探测浓度限。 IPDA激光雷达发射两束激光, 其中一束波长在目标气体的强吸收谱区, 称为测量波长或强吸收谱线, 记为λ on; 而另一束波长在目标气体的弱吸收谱区, 目标气体几乎不吸收, 称为参考波长或弱吸收谱线, 记为λ off。 为消除强吸收谱线和弱吸收谱线附近其他干扰气体(如遥感C6H6时的H2O、 NO2、 HCl)和削弱大气气溶胶的影响, 需要优化选择合适的强吸收谱线和弱吸收谱线, 两路波长反射信号的差异主要由目标气体的吸收强弱产生, 通过比较两个波长的反射信号, 可反演出目标气体在传输路径上的平均浓度。
在IPDA激光雷达中, 探测器接收的回波信号功率可表示为
式(1)中, P0为激光器的发射功率, η 为系统的光学效率, A为望远镜的有效接收面积, r为硬目标反射物距离, β 为理想漫反射硬目标的反射率, α (r)为距离r处的大气消光系数, α (r)=N(r)σ +α a(r), N为被测气体的分子数浓度, σ 为被测气体的分子吸收截面, α a(r)为除被测气体吸收因素导致的消光效应之外的所有因素产生的消光系数。
在5 km以下的短光程遥感系统中, 为提高回波信号的信噪比, 可采用反射镜代替漫反射硬目标, 并将其调整至与激光光束垂直, 在考虑到激光发散角与望远镜口径等因素后, 假设激光光束能量均匀分布, 可将激光雷达方程改写为
式(2)中, S(r)为激光束经距离r处硬目标物反射到接收望远镜时的扩散面积, 通常可表示为
将两束激光波长代入式(2), 计算波长λ on和λ off通道的比值, 由于两工作波长存在差异, 气溶胶的消光效应可能存在差异, 这有可能引入系统误差, 通常可通过数值仿真法或者对比实验法构建校正模型[15], 此处着重讨论中红外IPDA激光雷达探测苯气体的可行性, 先忽略两束激光波长差异导致的气溶胶消光差异, 进而可求得路径r内苯分子的平均数浓度为
${{N}_{r}}=-\frac{1}{2r\Delta\sigma }\text{ln}\left[ \ \frac{P\ \left( \ {{\lambda }_{\text{on}}}\ \ \right)/{{P}\ _{0}}\ \left(\ {{\lambda }_{\text{on}}} \ \ \right)}{P\ \left(\ {{\lambda }_{\text{off}}} \ \ \right)/{{P}\ _{0}}\ \left(\ {{\lambda }_{\text{off}}} \ \ \right)} \ \ \right]$(3)
式(3)中, Δ σ 为差分吸收截面, Δ σ =σ (λ on)-σ (λ off), σ (λ on)为苯分子在λ on处的吸收截面, σ (λ off)为苯分子在λ off处的吸收截面, P0(λ on)与P0(λ off)分别表示波长λ on和λ off通道的初始功率; P(λ on)和P(λ off)分别是望远镜接收到的两路差分吸收通道的回波信号。
中红外探测器APD的输出信噪比可表示为
$\text{SNR}=\frac{P{{D}^{\text{*}}}}{\sqrt{A\text{ }\!\!\Delta\!\!\text{ }f}}$(4)
式(4)中, P为探测器输入信号功率; D* 为探测器归一化探测率(由生产商提供); A为探测器光敏面积; Δ f为探测器工作带宽。 当忽略重叠因子影响时, IPDA激光雷达回波信号功率随积分路径增加而逐渐减小, 而λ on通道的信噪比随着被测吸收气体浓度的增加也会单调减小。 如果假设两通道探测器的随机噪声互不相关, 因此, 可得到IPDA激光雷达的总信噪比为
$\frac{1}{\text{SN}{{\text{R}}_{t}}}=\sqrt{{{\left( \frac{1}{\text{SN}{{\text{R}}_{\text{on}}}} \right)}^{2}}+{{\left( \frac{1}{\text{SN}{{\text{R}}_{\text{off}}}} \right)}^{2}}}$(5)
式(5)中, SNRon与SNRoff分别表示λ on和λ off两通道回波信号的信噪比。
根据式(3)推导结果, 假设式中各量之间无相关性, 可得苯分子数浓度测量相对误差为
式(6)中, Δ τ D表示差分光学厚度, 它与苯分子数浓度N、 硬目标反射物距离r和差分吸收截面Δ σ 有关, 可表示为Δ τ D=NrΔ σ 。 差分光学厚度随积分路径和被测气体浓度增加而单调增加, 考虑信噪比随积分路径和被测气体浓度增加而单调减少, 因此, 系统的相对误差会在合适的积分路径和气体浓度处具有最小值。
大气能见度是激光束传输中的重要衰减因子, 也是回波功率的重要影响因素之一, 如果假设大气水平均匀, 则大气消光系数与水平能见度V的关系可表示为[16]
式(7)中, α 为探测波长λ 的大气水平消光系数, q表示波长修正因子。
针对区域性苯浓度实时遥感问题, 利用中红外波段的带间级联激光器和衍射光栅, 提出并设计IPDA激光雷达系统(图1), 其主要参数参见表1。 两个连续波带间级联激光器发出中红外激光束, 通过控制温度和电流输入将两个激光器的波长分别稳定在强吸收谱区λ on处和弱吸收谱区λ off处, λ on光束经准直扩束后由分束片BS1分光1%的功率被PD1所接收并反馈到激光器控制部分, 其余功率经M1反射后由合束片BS3汇合后, 再经M2反射后进入大气。 λ off光束经准直扩束后由分束片BS2分光10%能量, 再被BS4分光1%功率被PD2接收并反馈, 剩余9%功率通过水汽池被PD3接收并反馈到激光器控制部分, 以确保精准调谐λ off波长, 其余功率经合束片BS3后, 再经M2反射后进入大气。 激光束在传输过程中与大气中的分子(含苯分子、 其他干扰气体分子)和气溶胶粒子等相互作用, 再经过硬目标反射后由光学系统接收, 经衍射光栅G1光谱分光后, 分别由APD1和APD2接收进行光电转换, 再经数据采集后进入计算机, 由算法软件反演得到积分路径中苯的平均浓度。
 | 图1 苯浓度探测的IPDA激光雷达原理图Fig.1 Schemitic diagram of IPDA lidar for detecting benzene concentration |
| 表1 IPDA激光雷达系统主要参数 Table 1 Main parameters of IPDA lidar |
该激光雷达系统采用带间级联激光器作为激励光源, 其具有体积小、 可调谐、 阈值电流低等优点, 其发射波长范围为3~6 μ m, 系统中采用了波长分别为3 090.89 cm-1(3 235.31 nm)和3 137.74 cm-1(3 187.01 nm)的带间级联激光器。 图2给出了生产商提供的实验室定制中心波长为3 090 cm-1的带间级联激光器的调谐性能, 通过控制其工作电流[图2(a)]和温度[图2(b)]对激光器精细调谐, 以实现与IPDA激光雷达设计波长匹配。
 | 图2 带间级联激光器的特性 (a): 波长随驱动电流变化情况; (b): 波长随温度变化情况Fig.2 Characteristics of interband cascade laser (a): The wavelength varies as driving current; (b): The wavelength varies as temperature |
中红外吸收光谱通常对应于物质分子的振转能级跃迁, 覆盖了有机物分子基团的双键、 三键振动区以及部分含氢化学键振动区, 因此中红外光谱区适合用于大气中痕量气体测量和分析。 中红外基频指纹强吸收光谱大多位于1 600~3 300 cm-1, 如芳烃的苯环C— H和环形C— C伸缩振动以及C— H弯曲振动, 其中C— H伸缩振动在3 000~3 100 cm-1。 中红外基频指纹的吸收谱具有吸收强、 谱线宽且密集的特点, 故往往变化比较平缓。 此外, 中红外波段也是大气传输窗口, 是激光大气传输、 卫星遥感的最优波段, 故可满足苯的探测要求。
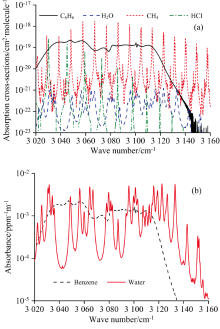
在使用IPDA激光雷达技术探测苯浓度时, 为减小干扰气体对其探测结果的影响, 在选择IPDA激光雷达两束工作波长时, 要尽量满足λ on位于苯吸收谱线的强吸收区且位于各干扰气体的弱吸收区, λ off位于苯吸收谱线的弱吸收区且位于各干扰气体与λ on处吸收截面相近的弱吸收区。 根据HITRAN数据库, 可得到苯气体以及其他主要干扰气体在波长3 100 cm-1附近的吸收谱线。 图3(a)给出了苯和影响最大的3种气体(H2O、 CH4、 HCl)的吸收谱结构, 从图中可看到苯在3 100 cm-1左右的吸收谱线变化比较平缓, 这为减小各干扰气体对苯浓度探测的影响提供了有利条件。 从图3(a)可看到, CH4的吸收截面量级与苯差距不大, 但变化规律且均匀分布着很多吸收谷; HCl的吸收截面略低于苯, 也有均匀的吸收谷可选, 因此, 选择苯气体的强吸收谱线和弱吸收谱线时, 可选择CH4和HCl的吸收谷作为IPDA激光雷达的工作区, 同时考虑水汽吸收谱线分布, 可选择强吸收谱线为3 042或3 100 cm-1, 弱吸收线为3 130和3 148 cm-1。
 | 图3 苯和主要干扰气体的吸收谱 (a): 吸收截面; (b): 吸光度(苯浓度34.87 mg· m-3, 水汽浓度3.47 g· m-3)Fig.3 Absorption spectrum of benzene and major interfering gases (a): Absorption cross section; (b): Absorbance (benzene concentration is 34.87mg· m-3, water vapor concentration is 3.47 g· m-3) |
另外, 虽然H2O吸收截面比苯小三个量级左右, 但大气中H2O的含量远大于苯气体浓度且变化范围较大, 不能只考虑吸收截面进行分析, 而应该采用包含浓度信息的吸光度进行分析, 当水汽和苯的浓度分别为34.87 mg· m-3和3.47 g· m-3(标准大气中水汽含量)时, 其吸光度如图3(b)所示, 可看出二者的吸光度大略相当, 因此, 为减小水汽吸收对苯浓度探测的影响, 需要精细调谐其中的某工作波长, 使两波长的水汽吸收度互相抵消, 考虑强吸收线λ on波长是系统信噪比的主要制约因素, 因此, 我们选择调谐弱吸收谱线λ off使之抵消强吸收谱线的水汽吸收效应(图1中的水汽池和PD3用于实现弱吸收谱线λ off的反馈调谐), 由于IPDA激光雷达的两工作波长应该尽量靠近, 以减少大气气溶胶粒子的消光差异带来的影响, 最终选择λ on=3 090.89 cm-1和λ off=3 137.74 cm-1。
基于标准大气模型, 构建不同大气水平能见度时的底层大气光学参量, 基于IPDA激光雷达探测痕量气体原理, 仿真分析积分路径、 能见度和水汽浓度对所设计中红外IPDA激光雷达的系统信噪比[式(5)]和苯浓度反演相对误差[式(6)]影响, 以评估IPDA激光雷达探测大气苯浓度的性能, 在具体仿真分析中, 取大气水平能见度为5 km, 积分路径长度2r为1.6 km, 水汽的体积浓度为0.4%作为常规工作参数。
路径长度不仅影响返回信号功率, 进而影响信噪比, 而且还直接影响着目标气体吸收效应的差分光学厚度, 从而从两方面综合影响着探测浓度的相对误差, 为获得最佳路径长度, 假设硬目标物距离r分别取0.5、 0.8和1 km, 即积分路径长度2r分别为1、 1.6和2 km时, 分析了不同路径长度对系统信噪比及相对误差的影响(图4), 从图中可以看到, 路径长度越短, 系统信噪比越大, 相对误差越小。 图4(a)中, 在苯浓度小于4 mg· m-3, 路径长度分别1、 1.6和2 km时, 对应信噪比分别为31、 26和23 dB左右, 且随着苯浓度增加, 信噪比降低速度很慢, 原因在于此时总信噪比受差分光学厚度影响较小; 但是, 苯浓度大于4 mg· m-3后, 三种情况信噪比迅速降低, 原因在于此时总信噪比主要受差分光学厚度的影响。 由图4(b)可看出, 当积分路径长度为1 km, 苯浓度在0.08~40 mg· m-3时, 相对误差优于10%, 当苯浓度为12 mg· m-3时, 为最佳探测状态, 相对误差优于0.2%; 当路径长度为1.6 km, 苯浓度在2~40 mg· m-3之间时, 相对误差优于10%, 在苯浓度为8 mg· m-3时, 为最佳探测状态, 相对误差优于0.6%; 而当路径长度为2 km时, 在苯浓度为2.4~24 mg· m-3之间情况下, 相对误差优于10%, 最佳探测情况在苯浓度为5 mg· m-3时出现, 相对误差优于1%。 从分析结果来看, 路径长度的不同对系统探测性能的影响较大, 在实际探测中, 要结合实际情况取较为合适的路径长度, 以达到更佳的探测效果。
 | 图4 不同路径长度时探测性能随苯浓度变化情况 (a): 信噪比; (b): 相对误差Fig.4 Detection performance varies as benzene concentration while path length is different (a): SNR; (b): Relative error |
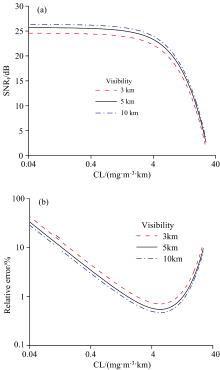
在仿真外场实验时, 路径上的苯浓度一般比较低, 路径长度比较长, 而在实验室测试时, 路径长度比较短, 苯浓度可以控制的比较高, 为了让仿真数据与实验室测试数据量级相近, 因此将浓度与硬目标距离的乘积作为一个仿真参量, 并称其为浓度路径积(concentration-path length product, CL), 此处, 路径长度固定, CL随着苯浓度变化而变化。 大气能见度是影响开放光程下IPDA激光雷达反射信号功率的重要因素之一, 根据式(7)的大气水平能见度与不同波长消光系数的关系模型, 假设通常重度污染情况下的大气水平能见度为3、 5和10 km时, 系统的信噪比和相对误差如图5所示。 从图可看出, 能见度越大, 大气越洁净, 系统信噪比越大, 相对误差越小。 由图5(a)可看出, 当CL小于2.8 mg· m-3· km时, 系统信噪比相对稳定, 且约为26 dB; 当CL大于2.8 mg· m-3· km时, 信噪比迅速下降, 此时系统信噪比主要受限于大气光学厚度的影响, 尤其是强吸收谱λ on通道, 可通过减少积分路径长度改善信噪比。 从图5(b)可以看出, 不同能见度情况对系统相对误差影响较小, 依据CL差异, 相对误差变化较大, 当CL在0.2~28 mg· m-3· km之间, 能见度大于3 km时, 苯浓度探测的相对误差优于10%, 且在CL约为5 mg· m-3· km时获得最佳探测状态, 相对误差优于1%。
 | 图5 不同能见度时探测性能随CL变化情况 (a): 信噪比; (b): 相对误差Fig.5 Detection performance varies as CL while visibility is different (a): SNR; (b): Relative error |
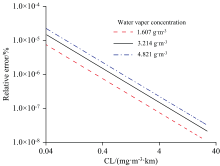
水汽的吸收谱线在中红外是非常丰富的, 大气中水汽含量较大且浓度起伏剧烈, 在选择IPDA激光雷达的测量波长和参考波长时, 通过选择相近的水汽吸收截面, 降低了水汽对探测结果的影响, 通过仿真比较不同水汽浓度对探测结果带来的影响, 其引起的相对误差可表示为
$\frac{\Delta N}{N}=\frac{\frac{1}{\Delta \sigma }\ \left[ \ {{\alpha }\ _{\text{w}}}\ \left(\ {{\lambda }_{\text{on}}}\ \right)-{{\alpha }\ _{\text{w}}}\ \left(\ {{\lambda }_{\text{off}}}\ \right)\ \right]}{\frac{1}{2 \Delta \sigma R}\ \ \left[\ \text{ln}\frac{P\ \left(\ {{\lambda }_{\text{on}}}\ \right)/{{P}\ _{0}}\ \left(\ {{\lambda }_{\text{on}}}\ \right)}{P\ \left(\ {{\lambda }_{\text{off}}} \ \right)/{{P}\ _{0}}\ \left(\ {{\lambda }_{\text{off}}} \ \right)} \ \ \ \ \ \ \ \ \right] \ \ \ \ \ +\frac{1}{\Delta \sigma }\ \left[\ {{\alpha }\ _{\text{w}}}\ \left( \ {{\lambda }_{\text{on}}}\ \right)-{{\alpha }\ _{\text{w}}}\ \left(\ {{\lambda }_{\text{off}}}\ \right)\ \right]}$ (8)
式(8)中, α w(λ on)与α w(λ off)分别为水汽在两个工作波长处的吸收系数, α w(λ )=Nwσ (λ ), 其中, Nw是水汽浓度, σ (λ )是水分子在波长λ 处的吸收截面积, 如表2所示。
| 表2 苯和水汽的吸收截面 Table 2 Absorption cross-section of benzene and water vapor |
从图6可看处, 当水汽浓度分别为1.607、 3.214和4.821 g· m-3时, 因其对激光能量的吸收效应固定, 当苯的CL逐渐增大时, 由水汽引起的探测误差逐渐变小。 当水汽浓度小于4.821 g· m-3时, 对苯浓度探测结果带来的误差非常小, 因此说明选取的系统工作波长可以有效减小由水汽的差分吸收效应对探测结果带来的影响。
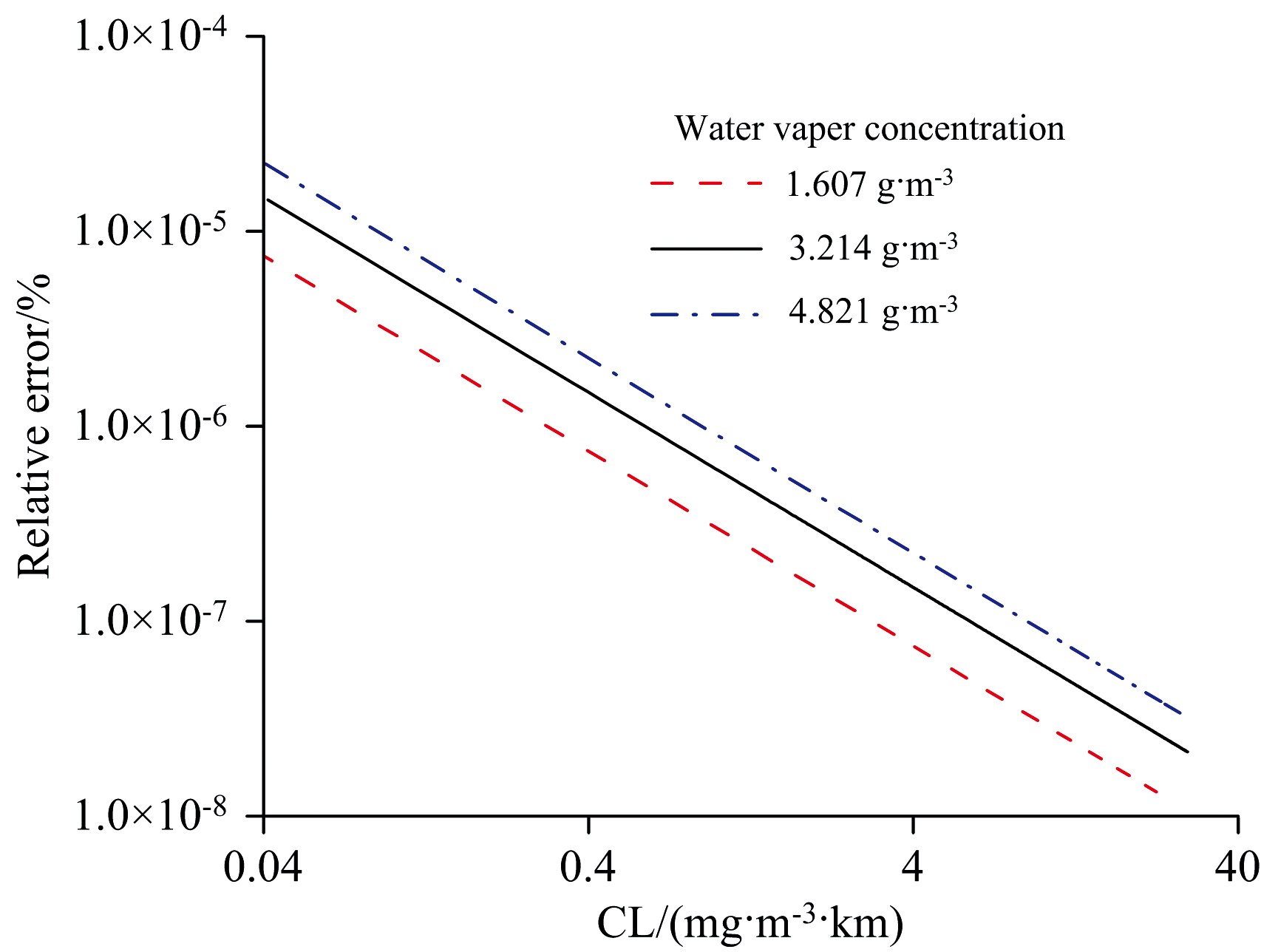 | 图6 水汽差分吸收效应引起的误差Fig.6 Error due to water vapor differential absorption effect |
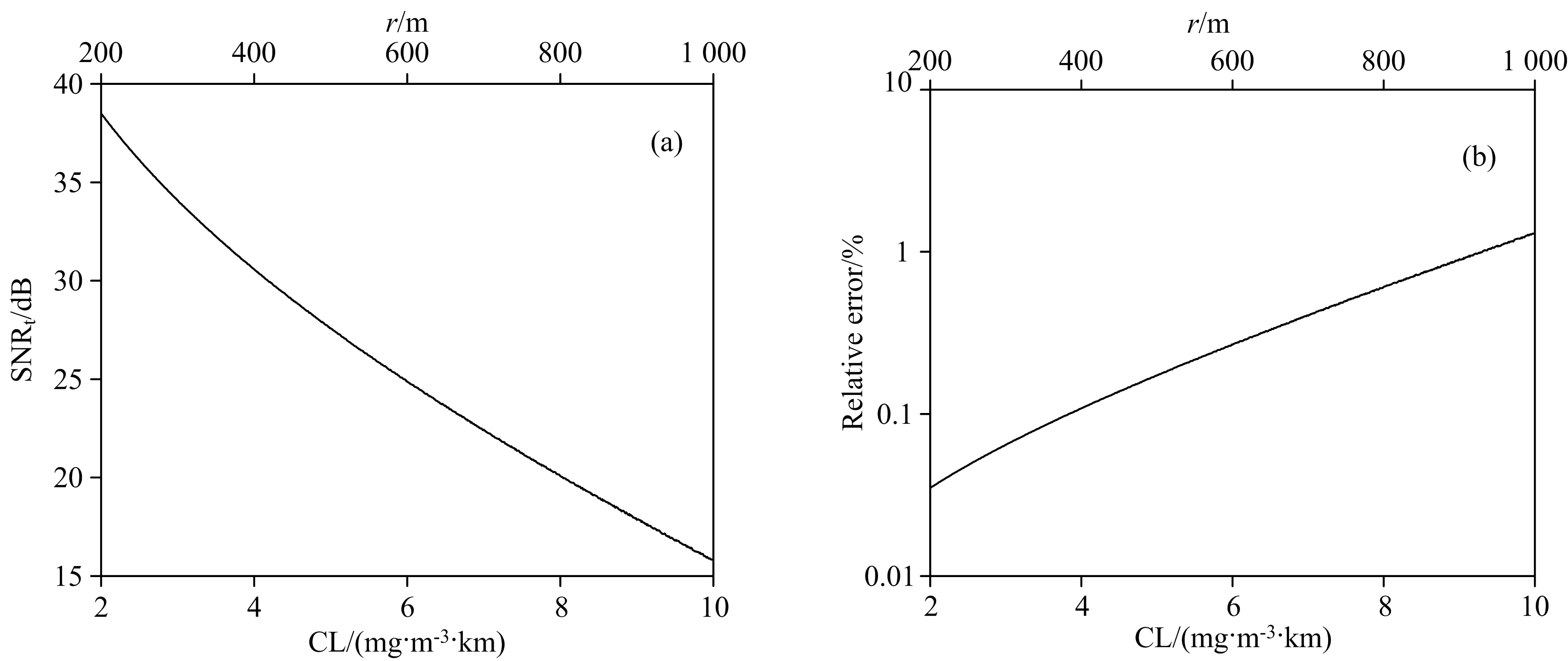
当水汽浓度分别为1.607、 3.214和4.821 g· m-3时, 其对探测系统信噪比与相对误差的影响(图7)。 从图7中可以看到, 水汽浓度越小, 信噪比越大, 相对误差越小。 从图7(a)可以看到, 当水汽浓度分别为1.607、 3.214和4.821 g· m-3时, 随着水汽浓度的增加, 信噪比下降不到1 dB。 从图7(b)可以看到, 在CL小于0.1 mg· m-3· km时, 相对误差较大, 当CL在0.2~28 mg· m-3· km时, 系统相对误差小于10%。 最佳探测状态在CL为5 mg· m-3· km时获得, 此时相对误差为0.5%左右, 且因水汽浓度变化而引起的相对误差变化约为0.1%。 因此, 可以得到水汽浓度变化对系统探测性能有一定的影响, 但是选择较佳的探测状态时, 可忽略水汽浓度变化对系统产生的影响。
 | 图7 不同水汽浓度时探测性能随CL变化情况 (a): 信噪比; (b): 相对误差Fig.7 Detection performance varies as CL while water vaper concentration is different (a): SNR; (b): Relative error |
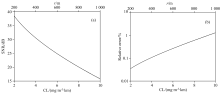
为有效治理大气中的二次污染, 目前我国规定在生产环境空气中苯的短时间接触容许浓度为10 mg· m-3, 因此可假设在探测路径上均匀分布10 mg· m-3的苯气体, 将相关系统参数代入到信噪比与误差模型中, 得到了信噪比与误差随CL变化关系(图8), 此时CL随路径长度变化而变化。 如图8所示, 随着CL的增加信噪比逐渐降低, 在6.4 mg· m-3· km处时, 探测的相对误差约为0.5%, 测量的绝对误差为0.05 mg· m-3。
 | 图8 苯浓度10 mg· m-3时探测性能随CL变化情况 (a): 信噪比; (b): 相对误差Fig.8 Detection performance varies as CL while benzene concentration is 10 mg· m-3 (a): SNR; (b): Relative error |
为验证所设计中红外差分吸收激光雷达的探测性能, 利用自制气体池, 开展了实验室测试实验, 实验系统如图9所示。 自制的气体池采用透射式结构, 可以实现光谱吸收法对苯浓度的检测, 基于HITRAN的吸收截面计算初始苯气体浓度, 利用气泵抽取苯气体并接入干燥空气, 计算获取其相对浓度变化量, 作为实际值, 然后, 通过差分吸收雷达技术反演得到测量值, 通过不同方法获得数值之间的相关性分析, 验证中红外波段差分吸收激光雷达探测的可行性。
 | 图9 室内实验系统图Fig.9 Indoor experiment system diagram |
实验结果如图10所示, 在气体池探测苯浓度实验中, 苯浓度测量值与实际值之间线性关系的R2约为98.7%, 可为中红外差分吸收激光雷达的外场实验提供依据。
 | 图10 气体池苯浓度探测数据对比Fig.10 Data comparison of benzene concentration detection in gas cells |
针对区域性苯浓度实时遥感问题, 基于苯在中红外波段缓变的吸收谱特征, 综合考虑H2O、 NO2、 HCl等主要干扰气体的吸收谱, 提出了基于带间级联激光器的中红外IPDA激光雷达探测系统。 优化选择IPDA激光雷达系统的测量波长和参考波长分别为3 090.89和3 137.74 cm-1, 通过构建的信噪比与误差模型, 仿真分析可得在大气水平能见度为5 km, 积分路径长度为1.6 km, 水汽的体积浓度低于0.4%的情况下, 苯的CL在0.1~24 mg· m-3· km范围内时, 系统探测的相对误差优于10%, 而苯的CL为5 mg· m-3· km时, 探测相对误差优于1%。 基于自制气体池开展了实验室苯浓度测试实验, 其测量值与实际浓度的线性关系系数R2约为98.7%。 实验室测试实验可为IPDA激光雷达实时遥感区域性苯浓度提供依据。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|