


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
结合DEM的红边-近红外植被指数提取城市植被信息
[王枭轩1  , 卢小平
, 卢小平1, * , 李国清2 , 王俊2 , 杨泽楠1 , 周雨石1 , 冯志立1 ]
, 卢小平, 李国清|
|


作者简介: 王枭轩, 1992年生, 河南理工大学自然资源部矿山时空信息与生态修复重点实验室博士研究生 e-mail: 1244377865@qq.com
随着生活水平的不断提高, 城市植被已成为衡量城市宜居性的重要标准之一, 对城市生物多样性评估和保护起到非常重要的作用。 因此, 合理规划城市植被是解决环境问题和提高生活质量的重要手段。 因此, 城市植被的提取和监测成为重中之重的任务。 目前, 城市植被提取一方面受到地域和物种的影响, 另一方面也受到地形和建筑物阴影的影响。 为解决上述问题, 提出了一种结合数字高程模型(DEM)的红边-近红外植被指数模型(RENVI)。 首先选取了3景经过辐射定标和大气校正的具有红边波段、 且光谱和空间分辨率较高的Worldview-3遥感影像; 然后, 根据红边波段对于植被具有较高的敏感性, 且红边范围内的光谱数据与反映植被生长状况的参数有较好的相关关系原理, 采用DEM模型和红边波段光谱差异, 有效去除地形和建筑物阴影; 最后, 在可见光波段范围内建立红边光谱-近红外光谱构建特征空间, 构建了红边-近红外植被指数模型, 同时与归一化植被指数(NDVI)和增强型植被指数(EVI)进行城市植被提取的定性和定量对比分析。 定性分析是利用真实植被影像参考图与模型提取植被影像进行视觉分析; 后者是采用用户精度、 生产者精度、 总体精度和Kappa系数进行量化分析。 定性分析表明: NDVI和EVI提取城市植被, 由于建筑和道路像元混淆在植被中, 产生了错分和漏分的问题。 RENVI较好地消除了阴影像元与植被像元混淆问题, 能准确的提取城市植被, 减少了冗余度, 增加了植被指数的信息量。 定量分析表明: RENVI模型较NDVI和RVI能够准确提取城市植被, 3景影像总体精度分别为89%, 81.4%和91.8%, Kappa系数分别为0.852 8, 0.791 3和0.905 2。 综上所述, 该方法有效提高了城市植被提取精度, 并取得了较好的提取视觉效果。
With the continuous improvement of living standards, residents’ requirements for urban vegetation are also increasing. Urban vegetation has become one of the important criteria to measure the livability of cities and plays a very important role in assessing and protecting urban biodiversity. Therefore, rational planning of urban vegetation is an important means of solving environmental problems and improve the quality of life. To sum up, monitoring urban vegetation becomes the main task, and the extraction of urban vegetation becomes the top priority. At present, the problems of urban vegetation extraction mainly focus on two aspects. Vegetation extraction is affected by region and species. On the other hand, Vegetation extraction is affected by topography and the shadow of buildings. In order to solve the above problems, this paper proposes a red edge-near infrared vegetation index model based on DEM. In this experiment, worldView-3 remote sensing images with red-edge bands and high spectral and spatial resolution after radiation calibration and atmospheric correction were first selected. Then, according to the high sensitivity of the Red Edge band to vegetation and the good correlation between the spectral data within the red edge and the parameters reflecting vegetation growth, the DEM model and the spectral difference between the red edge were adopted to remove the shadow of terrain and buildings effectively. Finally, the red-border spectrum-near-infrared spectrum is constructed based on the feature space within the visible band, and the red-border near-infrared vegetation Index model is constructed. At the same time, the urban vegetation extraction is compared and analyzed with NDVI and EVI. The analysis methods are qualitative and quantitative. The former is to extract vegetation images for visual analysis by using a real vegetation image reference map and model. The latter is a quantitative analysis using user accuracy, producer accuracy, overall accuracy and Kappa coefficient. The result of the qualitative experiment shows that the DEM model can effectively remove the shadow of buildings and terrain by combining with the different information of the red edge band between shadow and vegetation. After removing the shadows, NDVI and EVI were used to extract urban vegetation from the images, which made the buildings and road pixels confused in the vegetation, resulting in the problem of misclassification and omission. However, RENVI can effectively eliminate the confusion between shadow pixels and vegetation pixels, accurately extract urban vegetation, reduce redundancy, and increase vegetation index information. The quantitative experimental results show that the RENVI model can accurately extract urban vegetation compared with NDVI and RVI. The overall accuracy of the 3 images is 89%, 81.4% and 91.8% respectively, and the Kappa coefficient is 0.852 8, 0.791 3 and 0.905 2 respectively. In summer, this method can effectively improve the extraction precision of urban vegetation and obtain a better visual effect of extraction.
随着城市化进程和水平不断提高, 城市面临着较多的环境问题, 如空气污染、 城市热岛效应、 生态破坏等。 因此, 改善环境质量和生态条件是目前的重要的问题。 城市植被作为城市生态系统的重要组成部分, 在改善空气质量、 降低城市热岛效应、 降低CO2排放、 降低街道噪声、 调节气候、 维持城市生态平衡和保护生物多样性等方面具有重要的生态功能[1]。 城市植被信息的有效提取, 对城市生态文明建设和环境质量具有重要意义。
遥感技术作为一种新型探测技术, 可重复对城市植被进行监测, 得到植被细节信息, 可有效用于城市植被提取[2]。 城市植被提取方法主要包括基于像元的提取方法、 基于面向对象的提取方法和基于光谱指数的提取方法[3, 4, 5]。 前两种方法需要大量的训练样本和分类器筛选, 光谱指数的提取方法是根据植被的光谱特征, 提出具有高分离度的光谱指数能够有效区分植被和非植被区域, 该方法是一种直接、 高效的方法。 Gim等采用归一化差值植被指数(normalized difference vegetable index, NDVI)长期对植被时序监测, 但容易受到光谱饱和的影响[6]; 陈学兄等通过归一化差值山地植被指数(NDMVI)与NDVI对比分析, 证明了他们的模型受地形影响较小, 有利于估算植被覆盖度[7]; 李耀辉等证明了增强型植被指数(enhance vegetable index, EVI)结合SG滤波较传统方法提取植被面积的优越性[8]。 但是, 上述方法提取城市植被易受到建筑物阴影的影响, 主要是因为建筑物阴影像元亮度值较低, 混杂在植被像元中。 因此, 如何消除建筑物阴影的影响, 准确提取植被成为当下研究的重点。 Jing等提出了一种阴影植被指数(SEVI), 弥补了因地形校正产生的问题[9]; 柳晓农等基于SEVI构建植被区分阴影消除植被指数(VDSEVI), 解决了植被像元信息和阴影像元信息混淆的问题[10]; 江洪等采用SVI与RVI组合, 并结合地形因子提取植被, 有效减弱了了因地形产生的误差[11]。 上述方法, 注重了监测和消除阴影, 但缺乏对植被的浓密状及和与其他地物光谱差异的分析。
综上所述, 针对植被提取的两个问题: 一是城市植被覆盖种类和地域差异大, 植被指数地域性不明显; 二是建筑物和地形阴影像元容易和植被像元混淆, 提出了一种结合数字高程模型(digital elevation model, DEM)的红边-近红外植被指数。 首先, 采用DEM结合红边波段信息去除阴影。 然后, 以可见光中的红边波段和近红外波段的光谱特性, 构建了一种红边-近红外植被指数(RedEdge-NIR vegetable index, RENVI)提取城市植被, 同时与NDVI和EVI指数的城市植被提取结果做对比, 验证了该模型的有效性。 该方法既解决了阴影与植被信息混淆问题, 又准确的提取了城市植被。
为验证本方法的有效性, 选取了3景辐射定标和大气校正后的Worldview-3遥感影像, 空间分辨率为0.4 m, 三景分别为a1、 a2和a3, 均包含海岸带、 蓝、 绿、 黄、 红色、 红边和2个近红外8个波段。 a1大小为164× 152像素, a2为205× 179像素, a3为179× 204像素。
由图1所示, 3景城市影像中主要包含道路、 植被和建筑物等地物, a1和a3植被较为集中, 纹理信息丰富, 有少部分植被混杂在道路中; a2植被较为分散, 大部分植被混杂在建筑物和道路中。
 | 图1 worldview-3遥感影像Fig.1 Remote Sensing Images of worldview-3 |
1.2.1 建筑物阴影剔除
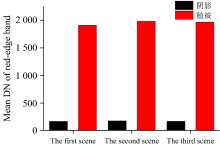
由实验数据可知, 该地区的阴影主要是地形和建筑物引起的, 因此, 为了准确提取城市植被, 采用了DEM结合红边波段的方法去除阴影。 首先, 采用DEM数据进行地形建模, 剔除影像中由地形产生的阴影。 然后, 基于红边波段, 对比阴影像元均值和植被像元均值差异剔除由建筑产生的阴影, 如图2所示。 由图2可知, 3景中阴影像元均值整体低于植被像元均值, 综上所述, DEM结合红边波段能有效去除山体阴影。
 | 图2 红边波段分析图Fig.2 Red-edge band analysis diagram |
1.2.2 RENVI模型构建
根据学者前期的结论[12]和植被的光谱曲线可知, 红边波段和近红外波段对于植被具有较高的敏感性, 且红边范围内的光谱数据与反映植被生长状况的参数有较好的相关关系。 因此, 利用红边波段和近红外波段构建特征空间, 可以增加植被和非植被的差别。 为了进一步研究猜想的有效性, 把3景影像的地物分为植被、 道路和建筑物, 绘制三种地物的近红外和红边波段的散点拟合图, 如图3所示。
 | 图3 地物拟合图Fig.3 Ground feature fitting maps |
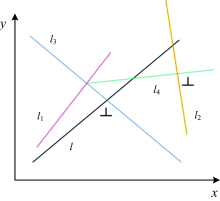
由图3可知, 拟合线的左下方为植被, 右上方为道路和建筑物。 为了准确解释模型的构造过程, 绘制了模型解释图4。 l为植被、 建筑物和道路的总拟合线, l1为植被拟合线, l2为道路建筑物拟合线, l3和l4分别为为l和l2的垂线。
 | 图4 模型解释图Fig.4 Model interpretation diagram |
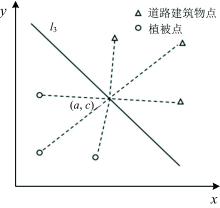
设该构造线的方程为l=kx+b, l1=k1x+b1, l2=k2x+b2, 该三个方程是通过最小二乘拟合而得。 根据式(1)和图5计算点(a, c), 且l与l3垂直, 得l3=-1/kx+(c+a/k)。 根据式(2)计算点(e, f), 且且l4与l2垂直, 得l4=-1/k2x+(e+f/k)。
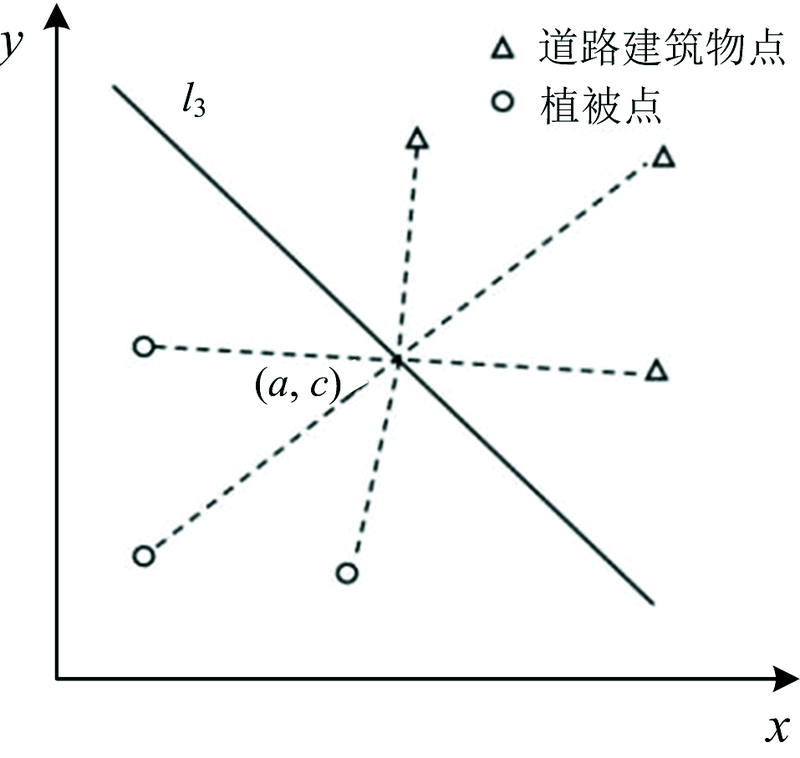 | 图5 a和c计算解释图Fig.5 Interpretation diagram of a and c calculations |
式(1)中, (a, c)为l和l3的交点, xi和yi为植被点的横坐标和纵坐标, xj和yj为道路建筑物点的横坐标和纵坐标。 l和l3为植被线和l的垂直线, k1和k分别为l1和l斜率, b1为l1与x轴交点。
根据图6可知, 任意像元点到直线l3的距离为式(3)。
 | 图6 样本点到l3距离图Fig.6 Graph of distance from sample point to l3 |
式(3)中, D等于任意像元点到直线l3的距离, k为l斜率, (a, c)为l和l3的交点。 当D=0时, 则像元在直线l3上, D> 0时在植被为像元, D< 0时为道路和建筑物像元。 因此, 可知RENVI为式(4)所示。
式(4)中, RENVI为红边-近红外植被指数模型, x为红边波段像元值, y为近红外波段像元值。
Worldview-3遥感影像根据1.2.1剔除阴影后, 根据1.2.2选取等量的城市植被像元, 建筑物像元和道路像元, 以可见光中的红边波段为x轴和近红外波段为y轴绘制散点图, 进行最小二乘拟合。 3景拟合线方程分别为y=0.632 2x+2 572.8, y=0.497x+3 101.1和y=0.488 4x+3 161.8, 根据式(1)计算出a分别为4 596.35, 4 587.69和4 581.32, c分别为4 953.62, 4 986.32和4 959.63; 根据式(4)计算分别得到RENVI=-1.582 0x-y+12 225.38, RENVI=-0.398 5x-y+2 815.816和RENVI=-0.394 2x-y+6 284.50。
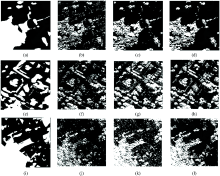
为验证本模型的可靠性, 以NDVI, EVI和RENVI 3种指数进行城市植被提取的定性分析验证。 图7为参考影像、 NDVI提取影像、 EVI提取影像和RENVI提取影像, 其中, 参考图是根据空间分辨率为0.4 m的Worldview-3遥感影像目视解译得到的。
 | 图7 不同指数提取城市植被结果 (a), (e), (i): 参考影像; (b), (f), (j): NDVI; (c), (g), (k): EVI; (d), (h), (l): RENVIFig.7 Urban vegetations extracted by different indexes (a), (e), (i): reference diagram; (b), (f), (j): NDVI; (c), (g), (k): EVI; (d), (h), (l): RENVI |
由图7可知, NDVI和EVI是剔除阴影后才进行的运算, 虽去除了阴影对植被的影响, 但有部分建筑和道路像元混淆在植被中被提取, 产生了错分和漏分的问题。 RENVI较好地消除了阴影像元与植被像元混淆问题, 能准确的提取城市植被, 增加了植被指数的信息量。
在上述影像中随机生成500个样本点建立混淆矩阵, 判断三种方法的提取精度。 总体精度和Kappa系数除了上述方法, 同时采用式(5)和式(6)进行分析, 验证方法的准确性。
表1, 表2和表3为三景影像提取城市植被的混淆矩阵和精度评价。
| 表1 第一景植被提取精度评价 Table 1 Evaluation of vegetation extraction accuracy for the first scene |
| 表2 第二景植被提取精度评价 Table 2 Evaluation of vegetation extraction accuracy for the second scene |
| 表3 第三景植被提取精度评价 Table 3 Evaluation of vegetation extraction accuracy for the third scene |
式(5)中, n为像元总个数; xi+和x+i分别为为混淆矩阵各行、 个列之和; xii为淆矩阵对角线元素。
Kappa系数
总体精度
式(6)和式(7)中: P0是分类的总体精度(overall accuracy), 表示对每一个随机样本, 分类结果与地面调查数据类型一致的概率; Pe表示由于偶然机会造成的分类结果与地面调查数据类型相一致的古率; n为分类的类型数量; N为样本总数; Pii为第i类型的被正确分类的样本数目。 当分类结果与实际类型完全吻合时, Kappa系数的值即为1。
由表1, 表2和表3可知, 由于去除了阴影, 本文提出的RENVI模型得到的用户精度、 生产者精度、 总体精度和Kappa系数大于其他两种提取结果, 说明本方法在植被提取方面展示出较高优越性。 其中, 第二景影像本方法提取精度低于第一景和第三景, 主要是因为影像中植被与其他地物轮廓勾杂, 边界模糊。
针对城市植被提取的两大问题, 即, 阴影与植被像元容易混淆和光谱植被指数地域性不明显, 提出了一种DEM结合RENVI模型的提取方法, 同与NDVI和RVI提取结果对比分析, 得出以下结论:
(1) DEM模型结合阴影与植被的红边波段差异信息, 能够有效解决阴影和植被像元混淆的问题。
(2)RENVI模型较NDVI和RVI能够准确提取城市植被, 3景影像总体精度分别为89%、 81.4%和91.8%, Kappa系数分别为0.852 8, 0.791 3和0.905 2。
(3)DEM结合RENVI模型具有较强的适应性, 不仅能够适应地形和建筑物的影响, 又能适应区域植被分布的影响。
研究表明, 提出的模型在去除阴影的前提下, 有效的提取城市植被, 同时能更多的应用于具有红边波段的遥感影像。 然而, 也具有不足之处。 (1)当城市地形复杂时, 去除建筑物阴影不稳定; (2)该模型只能运用于具有红边波段的遥感影像。 因此, 下一步研究需考虑模型的稳定性和普适应用性, 极大发挥模型的城市植被提取能力。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|