



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于数字摄像的测量观测系统设计
[雷鸣1  , 孙玫玲
, 孙玫玲3, * , 聂凯2 , 刘旭林2, * ]
, 孙玫玲, 聂凯]
|
|


作者简介: 雷 鸣, 1976年生, 天津市气象信息中心高级工程师 e-mail: lmeagle01@163.com
在大气能见度观测中, 相关研究多集中于白天观测, 夜间观测的研究比较少见, 而对于昼夜连续观测的研究更是鲜有报道。 目前, 国内外尚没有完全按照能见度定义研制的大气能见度自动观测仪出现。 针对这一问题, 基于CCD数字摄像技术, 模拟人工观测光学原理, 提出了一种能够昼夜进行大气能见度连续观测的方法。 该方法基于对目标物获得能见度计算公式, 并针对昼夜模式下的系统参数进行修正, 能够有效消除外在环境因素和相机自身系统内部因素引发的观测误差。 为验证算法的有效性, 针对天空遮挡、 半遮挡和空旷等不同情况(不同情况, 会影响观测环境的亮度, 以此测试系统对杂散光的抵抗能力, 以及对不同环境的适应能力), 搭建了基于该方法的3套原理样机。 利用搭建的数字摄像能见度仪(DPVS)在北京地区进行了实际的大气能见度分钟级观测。 观测实验表明, 基于该方法构建的观测系统, 不但具有较宽的观测范围, 而且能够有效适应各类复杂天气情况, 在雨雪霾等不同天气下, 均有较好的观测效果, 且无论是在能见度变化较快或者较为缓慢的情况下, DPVS系统均能够进行快速正确的响应。 而透过DPVS与散射仪和透射仪这两种标准观测仪器观测结果的对比分析发现, DPVS与前两者的观测结果具有较高的相关性: 0.973 1, 且观测性能相当, 其平均相对误差在-1.54%左右, 均方根相对误差在8.82%左右。 而本文算法出现的最大相对误差为-14.11%。 世界气象组织MOR规定: 能见度仪在满量程范围内, 其最大相对误差小于20%, 即认为是达到标准的能见度仪, 可以投入实际观测使用。 基于该算法研发的DPVS系统符合观测标准, 能够投入实际使用, 且DPVS系统的观测成本远比散射仪和透射仪更低, 具有较好的前景和应用价值。
In the atmospheric visibility observation, most of the related research focus on daytime observation, while the researches on nighttime observation are rare, and the research on the continuous observation of day and night are rarely reported. At present, there is no automatic atmospheric visibility observation instrument developed by the definition of visibility at home and abroad. In order to solve this problem, based on CCD digital camera technology, the principle of artificial observation optics is simulated, and a method of continuous observation of atmospheric visibility is proposed. This method is based on the visibility calculation formula of the target. It modifies the system parameters in the day and night mode, which can effectively eliminate the observation error caused by the external environmental factors and the internal factors of the camera system. In order to verify the effectiveness of the algorithm, three sets of principle prototypes based on the method are built for different situations such as sky occlusion, semi occlusion and open space (different situations will affect the brightness of the observation environment, to test the system’s resistance to stray light and adaptability to different environments). They are using the built digital photography visibility system (DPVS) to observe the actual atmospheric visibility at a minute level in the Beijing area. Observation experiments show that the observation system based on this method has a wide observation range and can effectively adapt to all kinds of complex weather conditions. It has a good observation effect in different weather conditions such as rain, snow and haze, and the DPVS system can respond quickly and correctly no matter the visibility changes rapidly or slowly. Through the comparative analysis of the observation results of DPVS, scatterometer and transmission instrument, it is found that there is a high correlation between DPVS and the observation results of the former two instruments: 0.973 1, and the observation performance is similar, with the average relative error of -1.54% and the root mean relative square error of 8.82%. The maximum relative error of this algorithm is -14.11%. According to the World Meteorological Organization (WMO) MOR, if the maximum relative error of the visibility meter is less than 20% within the full range, it is considered a standard visibility meter and can be used in actual observation. The DPVS system based on this algorithm meets the observation standard and can be practical. Moreover, the observation cost of the DPVS system is much lower than that of the scatterometer and transmission instrument, so it has a good prospect and application value.
能见度作为气象观测的要素之一, 随着在交通、 航空和环境监测中的广泛应用, 已经发挥越来越重要的作用[1], 尤其是近年来雾霾天气的增加, 导致低能见度天气下交通事故的发生, 给人民和国家带来不可估量的损失和影响。 而目前, 国内外能见度的观测方式仍然以目测为主, 但这种方式主观性较强, 规范性差, 且难以实时性获得数据。
当前, 透过仪器测量大气能见度的方法主要有透射法和散射法, 分别代表这两个方向的仪器有透射仪和散射仪。 前者观测精度高, 适合中低能见度天气, 缺点是过于依赖基线的长度, 且在雨、 雾等低能见度天气时, 会因水汽吸收等复杂条件造成较大误差。 散射仪的优点是安装方便、 测量范围广, 缺点是精度较低, 观测结果波动起伏较大[2]。
随着科学技术和CCD数字摄像技术的不断发展[3, 4], 科研人员将CCD数字摄像技术开始应用于大气能见度的观测当中[5, 6]。 这种观测方式能够避免传统观测的缺点, 同时接近人眼的观测模式, 并且完全符合能见度观测的定义。
1949年, Steffens最先利用照相法测量能见度, 但因为利用胶片照相, 较难定量化分析, 导致并未实际应用。 1999年, 在我国首先由中国科学院周秀骥院士提出了利用数字摄像能见度仪(digital photography visiometer system, DPVS)的观测思想和构架[7], 而后美国也在同年开始了DPVS观测仪的研制[8]。 周凯等透过自动提取道路深色区域, 利用暗原色先验理论获得大气透射率进而计算出能见度, 但其视程距离仅在200 m左右进行研究, 适用范围较小[9]。 戴庞达等基于曲线演化理论, 针对夜间观测光源图像, 将对能见度的反演转化为零水平集曲线演化过程对时间变量趋于无穷大时的数据求取, 该方法能够较好地对夜间能见度进行观测, 但在高能见度时测量精度会下降[10]。 陈晓婷等设计一种新的白天能见度算法, 将数字摄像机获取的彩色图像分割后留下背景天空区域, 对目标区域进行天空信息重建, 通过估计透射率计算能见度值。 该方法不需要架设目标物, 但计算量很大, 且对环境的适应能力较差, 而目标物区域的正确设置, 又需要消耗较长的时间[11]。 陆天舒等基于全视野数字图像, 通过多项式拟合方法建立离散样本数据集中大气透射率与对应时刻大气能见度的关系模型[12], 估算能见度, 该方法在环境光照均匀时效果较好, 但是实际环境很难满足这一条件, 且研究仅处于图片离线分析当中, 尚无法实时观测。
虽然关于能见度的观测算法很多, 但是却鲜有昼夜连续观测的系统, 本文设计了一套完整的昼夜观测系统。 该方法能够较好地克服观测误差, 获得较好的观测效果。
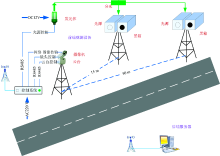
整个观测系统共分为两部分: 室内和室外, 室内主要是服务器等运行软件和数据处理的设备, 室外主要是摄像机(若需控制摄像机的转向则还配有云台)、 黑体、 光源, 以及电源、 数据传输和光源亮度控制系统、 光强检测系统等, 系统架构如图1所示。
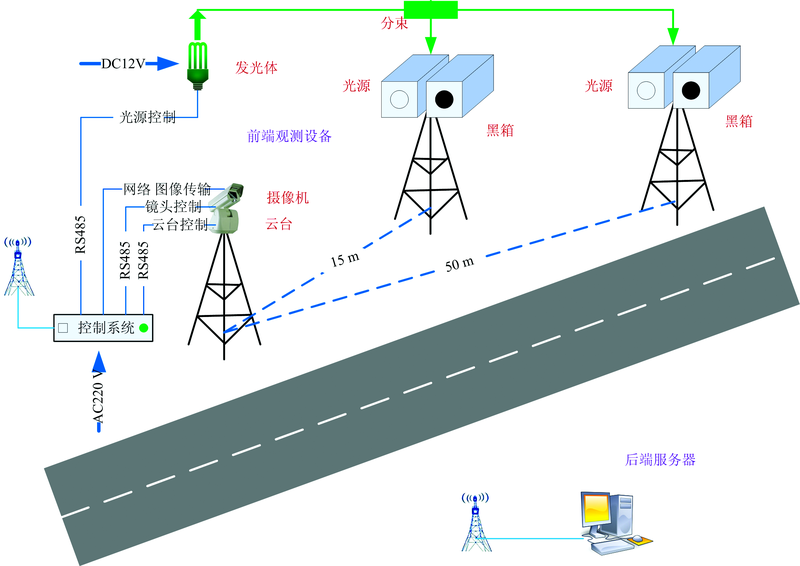 | 图1 观测系统示意图Fig.1 Schematic diagram of observation system |
其中, 黑体和光源成对放置, 便于后续的系统计算, 也便于昼夜的连续观测, 两对目标物的实际观测距离分别为: 15和50 m。 系统实物(无云台)如图2所示。
 | 图2 观测系统现场图Fig.2 The field diagram of observation system |
设相机到目标物的距离分别为L1和L2, 目标物的视亮度分别为Bt1和Bt2, 两目标物的真亮度分别为Bt10和Bt20, 目标物到相机之间的空气柱亮度为I01和I02, 目标物对应的天空背景视亮度分别为Bg1和Bg2, 目标物对应的天空背景真亮度分别为Bg10和Bg20, 则两个目标物的视亮度可由式(1)和式(2)计算[13]。
式(1)和式(2)相减, 可得
两边取对数, 整理则有
同理, 根据第二目标物黑体, 可以求得
将式(3)和式(4)相减, 整理则可求得
考虑到黑体的真亮度均为零, 即Bt20=Bt10=0。 同时, 这里假设天空背景是均匀的, 即Bg1=Bg2, Bg10=Bg20。 将以上诸多条件代入式(5), 并整理则有
将式(6)代入式(7)中, 即可获得如式(8)能见度观测计算公式
式(8)中, 各变量均为已知, 其中Bt1, Bt2, Bg1和Bg2可直接由观测图片获取。
另外, 需要注意在实际中, 成像并非理想状态, 再加上远目标物与相机之间的距离比较远, 成像明显较小(见图3), 相同系统噪声下, 必然会对成像较小的远目标造成更大的影响(近目标物因为距离合宜而成像较大, 面积比远目标物大了4倍左右, 而更稳定, 不易受到影响)。 为了进一步削弱系统误差, 设远目标物的真实视亮度为B't2, 而通过相机实际观测到的含有系统固有误差的视亮度为Bt2, 针对远目标引入修正因子α , 因为要消除的是系统固有误差, 所以, 可以设B't2=α Bt2。 因为式(8)中的Bt2所代表的就是目标物真实视亮度, 即: 虽然此时观测到的远目标视亮度是Bt2, 但它并不准确, 而应该以其真实视亮度B't2代替, 所以式(8)可以改写为式(9)
 | 图3 各系统的观测视频画面Fig.3 Observation video of each system |
当白天模式需要进行标定的时候, 选取高能见度观测值(能见度由其他探测仪器观测而得), 假设V=15 000 m, 代入式(9)即可获得系统的修正因子α 值。 从而能见度即可根据式(9)计算获得。
当为夜间观测模式时, 设光源1和光源2的真亮度分别为Bt10和Bt20, 其视亮度分别为Bt1和Bt2, 光源到相机之间的空气柱亮度为BL1和BL2, 黑体1(即光源1的天空背景)的真亮度为Bb10, 黑体2(即光源2的天空背景)的真亮度为Bb20, 黑体的视亮度分别为Bb1和Bb2, 则两个光源的视亮度可由如下式计算
由于同组目标物距离相机的距离相同, 且黑体均按标准黑体制作, 其真亮度约等于0。 所以, 有BL1=Bb1, BL2=Bb2。 同理, 根据式(7), 可以获得夜间能见度观测公式如式(10)
式(10)中, 其他均为已知数据, 而夜间模式参数
为了测试算法的有效性, 实验地点选取在中国气象局北京南郊观测场, 对比数据选取自观测场提供的标准能见度仪观测数据。 考虑成像清晰度和基线长度对能见度精度的影响, 设定目标物与相机之间的距离分别为15和50 m(实际距离略有偏差), 针对天空空旷、 存在部分遮挡和存在遮挡三种情况, 分别架设了3台观测仪器, 拍摄到的视频画面如图3所示。
系统采集的图像均为灰度图, 白天画面亮度自动调节范围设置在[180, 220](满量程为[0, 255]), 夜间观测模式时, 系统曝光量设为30 000。 观测系统每间隔1 min测量一次, 采样时间间隔为50 ms, 每次测量50张图片平均, 从而消弱异常数据的干扰。 以存在部分遮挡的观测系统为例(其他系统采集数据相似, 不再赘述), 其采样数据如图4所示。
 | 图4 观测系统昼夜数据采集样例Fig.4 The example of day and night data acquisition of observation system |
其中, 图4中左上角标记了观测系统采集到的详细观测信息, 位于上方区域的方框为目标黑体采集区(两个叠放在一起的长方体, 上面的是黑体, 下面的则是光源), 位于下方区域的方框为目标光源采集区, 最顶部的方框为天空背景的采集区。
为进一步测试算法的观测性能, 选择连续观测时间为7月11日到7月14日以便更好地测试系统的稳定性。 同时, 为了测试系统的适应能力, 也特别选择临近时间不同等级下的空气质量天气, 数据时间均为完整的1 d, 时间间隔为1 min, 数据上限统一设为15 000 m, 并选择标准能见度仪: 大气透射仪(LT31)和前向散射仪(PWD22)测量结果进行数据对比分析。 相对应的天气情况, 见表1。
| 表1 观测的天气状况 Table 1 Observed weather conditions |
为进一步分析本文算法的观测性能, 以三组数据的均值为标准数据。 这样的优点是对每一台观测仪器都是公平的, 使得不同观测方法的观测值在标准数据中所占的比重是相同的。 则分别计算各观测数据与标准数据的误差情况如表2所示。
| 表2 观测误差 Table 2 Observation error |
各观测数据与标准数据的相关系数和均方根相对偏差比较结果, 如表3所示。
| 表3 相关系数和均方根相对偏差比较 Table 3 Comparison of correlation coefficient and root mean square relative deviation |
由图5可以看到本文算法具有较宽的观测范围, 能够满足大范围观测的需要, 且与两种标准能见度仪的观测结果吻合度较高。 在各种天气状况下, 本文算法均能够正常的有效观测。 无论是在能见度变化较快或者较为缓慢的情况下, 均能够进行良好的观测。
 | 图5 能见度观测对比曲线图 (a): 2月12日; (b): 2月18日; (c): 4月02日; (d): 5月05日; (e): 7月11日; (f): 7月12日; (g): 7月13日; (h): 7月14日Fig.5 Contrast curve of visibility observation (a): February 12; (b): February 18; (c): April 02; (d): May 05; (e): July 11; (f): July 12; (g): July 13; (h): July 14 |
由表2可以看到, DPVS、 透射仪和散射仪三种观测数据均是整体呈现随着能见度增大, 观测误差也逐渐增大的现象, 而本文算法在低能见度时观测误差较大, 其余范围能见度的观测, 误差相对稳定, 甚至略优于其他两种仪器的观测结果。 这是因为DPVS算法观测的基线长度(40 m)远比透射仪的更大, 因而具有较好的观测稳定性, 而散射仪的观测是以较小的采样空间去估算能见度, 所以随着距离的增加, 误差自然会逐渐增大。 而DPVS算法之所以低能见度时观测误差较大, 可能的原因是低能见度造成图像边界特征不明显, 在进行目标物定位采样的时候, 会造成一定程度的误差, 导致系统定位偏离正确采样位置, 从而造成采集到的目标物亮度值异常, 进而使能见度计算误差增大, 而通常情况下, 近目标物因为距离较近比较清晰, 不容易出现偏离, 偏离较常出现在远目标物上, 而这样的偏离往往会导致所采集到的目标物亮度值出现偏高的情况, 由式(8), 可以清楚的看到, 这会导致分母数值增大, 从而造成最终观测能见度的计算结果偏低。 而DPVS相对误差是小于零的结果, 也证明了这一点。 但是随着能见度的增加, 图像边界特征较为明显, 更容易定位和采样, 误差随之降低。
由表3可以看到, 三种观测模式的相关性都比较高, 且较为接近, 数据偏差的程度也比较相近。 而本文算法出现的最大相对误差为-14.11%。 世界气象组织MOR规定: 能见度仪在满量程范围内, 其最大相对误差小于20%, 即认为是达到标准的能见度仪, 可以投入实际观测使用。 本文算法符合观测标准, 能够投入使用。
设计了一套基于视频摄像技术的能见度观测系统, 该系统能够较好地进行大范围昼夜连续观测, 观测结果较为稳定, 且安装简便, 仅需架设一对观测目标物即可进行观测, 其观测精度与透射仪和散射仪等标准能见度仪观测结果相当, 并能够适应各种复杂天气条件下的观测, 但观测成本却大大降低, 具有较好的应用价值和市场前景。 目前, 系统存在的问题, 主要集中在目标物边界的准确定位上, 这在低能见度下会影响系统的观测精度, 以后将会在这方面做进一步的研究, 提升系统目标物的定位算法性能, 使系统在低能见度时, 依然能够有良好的表现。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|