


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于无人机高光谱影像的建筑垃圾分类研究
[徐隆鑫1, 2, 3, 4  , 孙永华
, 孙永华2, 3, 4, * , 吴文欢1 , 邹凯2, 3, 4 , 何仕俊2, 3, 4 , 赵元铭2, 3, 4 , 叶淼2, 3, 4 , 张晓涵2, 3, 4 ]
, 孙永华, 吴文欢|
|


作者简介: 徐隆鑫, 1995年生, 核工业北京地质研究院遥感信息与图像分析技术国家级重点实验室助理工程师 e-mail: xlx1277376536@163.com
建筑垃圾“围城”已经成为现阶段城市环境治理面临的主要问题, 严重制约了城市生态环境的可持续发展, 做好建筑垃圾的分类对保护城市水资源、 提高城市土地利用率、 提升居民生活质量意义重大。 该研究将GaiaSky-mini 2推扫式机载高光谱成像仪(400~1 000 nm)搭载在经纬M600Pro无人机上, 选择晴朗无风的试验环境, 实时获取研究区高光谱遥感影像。 对采集的研究区高光谱遥感影像进行几何校正、 图像裁剪、 辐射校正等预处理; 将研究区内地物分为背景地物和建筑垃圾两大类, 其中背景地物包括芦苇、 蒿子、 水体、 阴影、 裸土和柏油路, 建筑垃圾包括白色塑料、 防尘布、 地基渣土和瓦砾砂石; 基于影像像元选取样本点, 分别提取研究区内6种背景地物和4种建筑垃圾的光谱信息, 制作光谱曲线, 并依据光谱特征差异, 选取特征波段, 通过波段计算统计并选取合理阈值, 利用决策树分类法实现背景地物的分离和建筑垃圾的识别提取; 针对不同类别的背景地物和建筑垃圾分别选取验证样本点, 对背景地物的分离结果和建筑垃圾的识别结果进行精度评价。 结果表明, 背景地物和建筑垃圾总体识别精度为85.91%, Kappa系数为0.845; 针对建立的背景地物分离决策树, 6种背景地物的分类效果均较好, 其中芦苇、 柏油路和裸土的生产者精度为95%, 整体能较好的将背景地物分离; 针对建立的建筑垃圾识别决策树, 防尘布和瓦砾砂石的生产者精度为95%, 白色塑料和地基渣土的生产者精度为90%, 能精确的提取研究区内的建筑垃圾。 研究表明决策树分类法在无人机高光谱遥感影像中实现建筑垃圾的识别与提取具有很好的分类准确度, 同时也验证了无人机高光谱遥感在建筑垃圾分类提取领域的科学性和可行性, 对未来建筑垃圾的分类识别工作具有一定的实际意义。
, SUN Yong-hua, WU Wen-huanThe “siege” of construction waste has become the main problem of urban environmental pollution at this stage, severely restricting the sustainable development of the urban ecological environment. A good classification of construction waste is of great significance to protecting urban water resources, improving the utilization rate of urban land and improving residents’ quality of life. In this paper, the GaiaSky-mini 2 push-broom airborne specular imager (400~1 000 nm) is mounted on the DJ MATRICE M600Pro UAV, and a clean and windless test environment is selected to collect hyperspectral remote sensing images of the study area in real-time. The hyperspectral remote sensing images of the study area were preprocessed by geometric correction, image cropping and radiometric correction; The objects in the study were divided into two categories: background objects, including reed, wormwood, water, shadow, bare soil and asphalt road, and construction waste including white plastic, dust cloth, foundation residue and rubble sand. Based on pixel points, select the regions of interest (ROI) of various features as training samples, extract the spectral information of six background features and four types of construction waste in the study area, and make spectral curves based on different spectral feature differences between features. Select feature bands, calculate statistics through bands and select reasonable thresholds, use decision tree classification to separate background features and identify and extract construction waste in the study area. Target different background features and construction waste types were selected to verify the sample points and evaluate the accuracy of the separation results of background features and the identification results of construction waste.The results show that the overall recognition and classification accuracy of background features and construction waste is 85.91%, and the Kappa coefficient is 0.845. According to the established decision tree for the separation of background features, the classification effect of six background features is good, among which the producer accuracy of reed, asphalt road and bare soil is 95%, and the overall separation of background features is good. According to the established construction waste identification decision tree, the producer accuracy of dust cloth and rubble sand is 95%, and the producer accuracy of white plastic and foundation residue is 90%, which can accurately extract construction waste in the study area. This study shows that decision tree classification is realized in the unmanned aerial vehicle (UAV) hyperspectral remote sensing image recognition and extraction of the construction waste has good classification accuracy. Moreover, to verify the unscrewed aerial vehicle (UAV) hyperspectral remote sensing in the field of construction waste classification to extract the scientific nature and feasibility of construction waste classification recognition for future work has a specific practical significance.
随着我国城市化进程的进一步加快, 城市中的建筑垃圾也在持续增多, 而建筑垃圾大多体积大、 重量大, 随意堆放、 填埋将会侵占大量土地, 同时也严重危害了公共安全[1]。 当下建筑垃圾的分类回收主要是借助人工手段, 不仅工作量大、 成本高而且还极易出现建筑垃圾错误分类的现象, 造成更加广泛的环境破坏。
无人机遥感相较于卫星遥感可以更为轻松地获取厘米级甚至更高分辨率的遥感影像, 不存在高空间分辨率和时间分辨率的矛盾[2], 并且具有操作灵活、 性价比高等突出优势, 已被广泛应用于水源地污染源监测[3]、 农作物叶片氮素含量反演、 森林冠层识别[4, 5]、 土壤水分检测、 植被、 农田[6, 7]的自动化分类识别等多种领域。 近些年来, 国内外不少学者借助高光谱成像技术, 利用光谱角填图(SAM)、 Fisher判别分析以及机器学习等方法建立模型, 对纸制品、 木制品[8]、 塑料[9]、 混凝土、 砖瓦/屋顶瓦、 地砖/墙砖[10]等多种垃圾进行分类识别, 取得了很好的效果。 高光谱遥感图像中每个像素均含有上百个不同波段的光谱反射信息, 利用无人机搭载高光谱成像仪获取高光谱遥感影像, 降低了作业成本的同时还可以快速、 实时地捕获地物细微的空间特征和光谱特征[11]。 因此, 利用无人机高光谱遥感技术来实现建筑垃圾的分类回收, 不仅可以充分考虑到不同类型建筑垃圾的光谱特征差异性, 提高分类识别的准确性, 还节省了人力物力, 弥补了传统方法的不足。
本研究利用无人机搭载GaiaSky-mini 2高光谱成像仪获取研究区高光谱遥感影像, 分析各类地物的二维光谱曲线, 找出各类地物之间的光谱特征差异, 选取特征波段, 利用决策树分类法分别建立背景地物分离模型和建筑垃圾识别分类模型, 验证无人机高光谱在建筑垃圾分类与识别领域的科学性与实用性。
研究区位于中国辽宁省盘锦市大洼区二界沟镇西大井村北部1 km处, 该区位于辽东湾半岛北部, 濒临渤海, 四季分明、 温度适宜、 光照充裕, 属于暖温带大陆性半湿润季风气候区。 研究区内包含水体、 植被、 裸土、 白色塑料、 防尘布、 地基渣土和瓦砾砂石等多种类型地物, 能提供实验样品需求。 研究区影像如图1所示。
 | 图1 研究区影像Fig.1 Image of the study area |
本研究使用大疆经纬M600Pro无人机获取研究区数据影像。 经纬M600 Pro可以实现超长续航, 其标配的Lightbridge 2高清数字图传系统, 可以提供最大5KM的远距离、 低延时高清实时影像与控制信号传输能力。 无人机平台搭载的GaiaSky-mini 2推扫式机载高光谱成像仪, 拥有176个光谱通道, 光谱范围为400~1 000 nm, 光谱分辨率为3.5 nm, 系统内置扫描系统和增稳系统, 大大减少飞行过程中由于无人机机身震动造成的图像质量差的问题。 并且在图像采集的过程中, GaiaSky-mini 2可以同时实现自动曝光和自动匹配扫描的速度。
试验于2019年9月27日进行, 实验时天气晴朗、 无风。 无人机航高设定为200 m, 航线固定, 航速设定为12.8 m· s-1; 采用推扫模式采集数据, 获取的无人机高光谱影像的空间分辨率为0.079 m。 搭载的高光谱相机具体技术参数见表1。
| 表1 高光谱相机技术参数 Table 1 Technical parameters of hyperspectral camera |
数据采集过程中, 由于受到传感器自身姿态角、 大气折射和地球曲率等因素的影响, 会使得影像发生一定程度的几何畸变。 数据处理过程中利用野外试验时选取的无遮挡、 具有明显特征的地面控制点数据对无人机遥感影像的几何畸变进行数学模拟完成几何校正。 根据像控点布设原则, 选择道路中间路沿石、 池塘拐角以及人工布设的标志物等共5个像控点, 其中人工布设的标志物处用红色喷漆喷成十字交叉型, 像控点坐标使用千寻星矩SR1智能网络RTK接收机测量。 飞行过程中, 航线两端由于无人机自身抖动, 云台未能及时补偿运动误差会造成影像的扭曲变形, 因此需要对影像进行裁剪, 消除影像扭曲对试验的影响。
利用SpecView软件平台针对高光谱影像进行辐射校正, 用来消除数据获取和传输过程中产生的系统的、 随机的辐射失真或者畸变[12]。
首先进行反射率校正, 将遥感影像的DN值(digital number)转化为反射率值(reflectance), 反射率校正的公式如式(1)
式(1)中, Rref是反射率校正后的图像反射率值, DNraw是原始影像的DN值, DNdark是相机测量时产生的内部系统误差, DNwhite为相机所测的白板数据。
其次, 考虑到试验过程中, 高光谱成像仪是在无人机飞到一定高度后获取的影像数据, 因此可能会受到大气、 水汽等因素的影响。 为了消除这些因素产生的影响, 实验开始之前, 在拍摄区域放置一块经过国家计量院标定过的反射率为20%、 面积为1 m× 1 m的灰布, 在高光谱成像仪获取影像时, 只需要保证其中一景影像覆盖到灰布即可。 大气校正的公式如式(2)
式(2)中, Rfixed是消除水汽或大气等因素之后的图像光谱反射率, Rref是经过反射率校正后的图像反射率, Rstandard是经过国家计量院标定的灰布的光谱反射率, Rgrayref是经过反射率校正后图像中的灰布反射率。
1.3.1 识别分类方案
将研究区内地物分为背景地物和建筑垃圾两大类, 其中背景地物包括植被、 水体、 裸土和柏油路等共6类, 建筑垃圾包括白色塑料、 防尘布、 地基渣土和瓦砾砂石共4类, 具体信息见表2。
| 表2 研究区地物类型 Table 2 Types of surface features in the study area |
决策树分类法是基于树结构原则, 按照一定的分类原则将原始数据分为特征更为均质的子集, 属于多元统计分类法的一种。 这些子集在数据结构中称为节点, 其基本思想是利用一组自变量来预测每个样本最可能对应的类型即因变量[13]。 基于各类背景地物和建筑垃圾的光谱曲线, 寻找特征波段, 并利用决策树分类法进行波段运算, 对无人机高光谱遥感影像进行背景地物的分离和建筑垃圾的识别提取。
1.3.2 背景地物分离
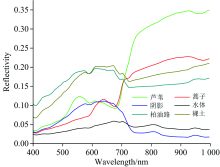
研究区内背景地物主要包含芦苇、 蒿子、 水体、 阴影、 裸土和柏油路, 为了消除背景地物对建筑垃圾识别提取产生的影响, 需要将背景地物分离。 针对6种背景地物, 分别选取样本点(其中芦苇、 水体、 裸土和柏油路分别选取50个, 蒿子和阴影分别选取30个), 统计并提取样本点光谱信息, 制作各类背景地物的光谱曲线, 如图2所示。
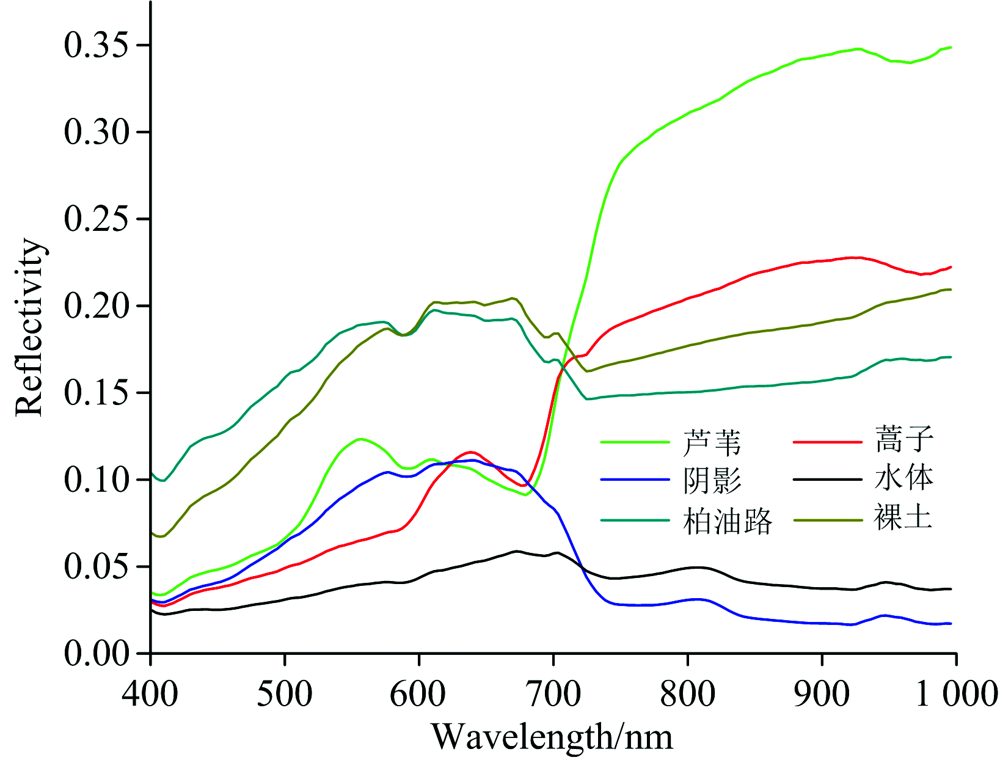 | 图2 各类背景地物光谱曲线Fig.2 Spectral curves of various background features |
基于各类背景地物的光谱曲线, 分析不同背景地物的光谱特征差异, 选择特征波段。 研究区内无效区域是由于对无人机影像进行几何校正导致图像位置变化, 而显示结果仍然以矩形范围显示产生的“ 黑边” , 反射率为零; 分别选取红光波段721 nm、 绿光波段551 nm和蓝光波段485 nm, 利用三波段和为0将无效区域分离。 构造归一化植被指数(NDVI), 当NDVI大于等于0.2时首先将植被分离出去; 在554~587 nm区间内, 芦苇的光谱反射率逐渐降低, 蒿子的光谱反射率却逐渐升高, 因此通过波段比值法可以将植被进一步细分。 水体和阴影的光谱反射率整体较低, 光谱曲线变化较为平缓, 二者的光谱曲线在947 nm处同时处在波峰位置, 此时的光谱反射率值明显低于其他类型背景地物, 因此利用单波段阈值法将水体和阴影从影像中分离出来; 构造归一化水体指数(NDWI), 当NDWI大于0.5时提取水体; 裸土和柏油路的光谱反射率从672 nm处开始快速下降, 并且在537~648 nm之间同时存在反射峰和谷, 这是其他类型背景地物不具备的光谱特征, 首先利用单波段阈值法和波段比值法将二者分离出来; 对比分析二者光谱曲线, 发现裸土和柏油路在534~577 nm之间的曲线斜率存在差异, 因此通过波段比值法进行细分。 分离背景地物所构造的决策树如图3所示。
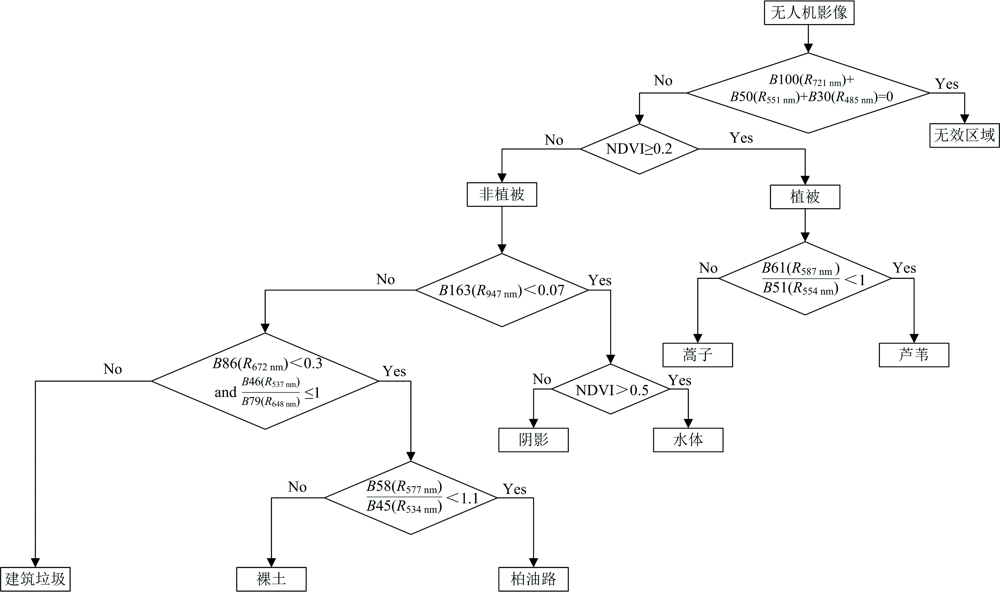 | 图3 背景地物分离决策树Fig.3 Decision tree for separation of background features |
1.3.3 建筑垃圾识别提取
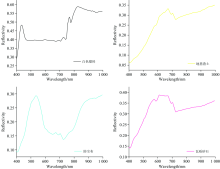
研究区内的建筑垃圾主要包括防尘布、 地基渣土、 瓦砾砂石、 白色塑料, 针对4种建筑垃圾分别选取30个样本点, 提取各类型建筑垃圾的光谱信息, 制作光谱曲线, 如图4所示。
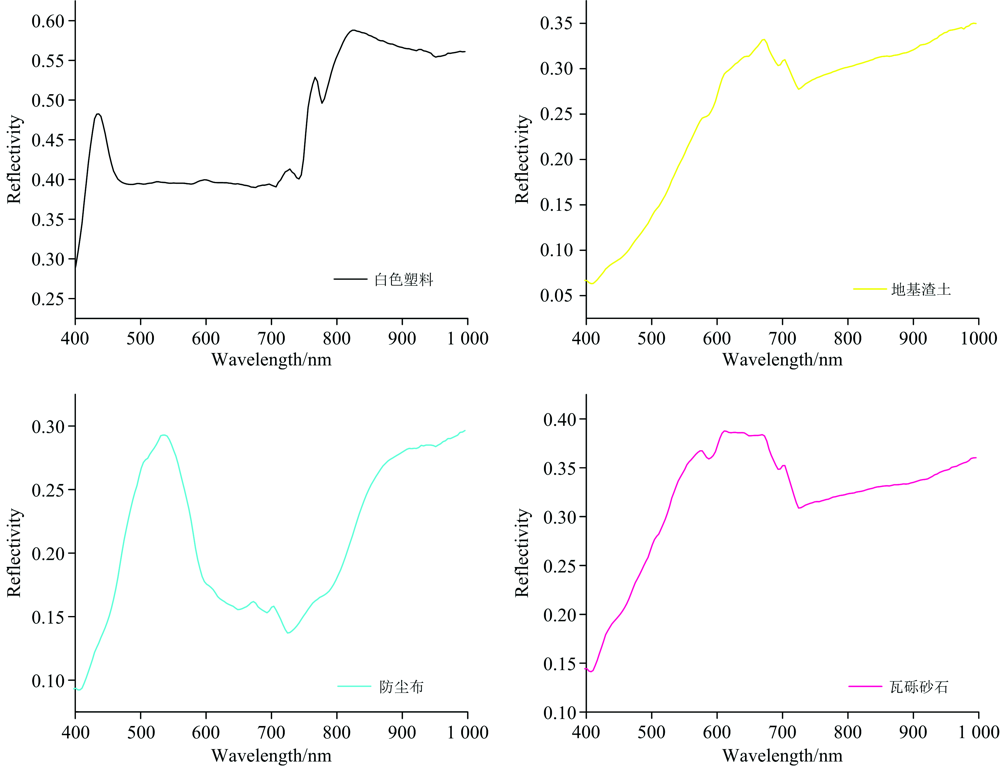 | 图4 各类建筑垃圾光谱曲线Fig.4 Spectral curves of various construction waste |
由图4可知, 4种建筑垃圾的光谱特征差异较为明显, 其中白色塑料的光谱曲线在433 nm处的光谱反射率值远远高于其他类别建筑垃圾, 因此可以利用单波段阈值法提取白色塑料。 防尘布在534~574 nm区间内的光谱反射率开始降低, 明显区别与其他类型建筑垃圾, 因此利用波段比值法提取防尘布。 地基渣土和瓦砾砂石的光谱曲线在407 nm处为波谷, 对应的光谱反射率值也分属于不同区间, 因此利用单波段阈值法分别提取地基渣土和瓦砾砂石。 识别提取建筑垃圾构造的决策树如图5所示。
 | 图5 建筑垃圾识别决策树Fig.5 Decision tree for identification of construction waste |
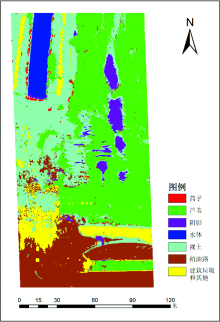
根据建立的背景地物分离决策树, 对背景地物进行分离, 分离结果如图6所示, 图中每种背景地物的分类结果以不同颜色进行显示, 并将建筑垃圾和其他未参与分类的地物用黄色区别显示; 单从分离结果图来看, 各类背景地物之间能够很好的区分出来, 整体分离效果较好, 但水体和阴影、 柏油路和裸土之间仍存在少数错分现象。
 | 图6 背景地物分离结果Fig.6 Separation results of background features |
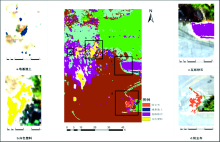
根据建立的建筑垃圾识别决策树, 对4种建筑垃圾进行识别提取, 结果如图7所示, 图中将4种建筑垃圾的分类结果以不同的颜色进行放大显示; 单从分类结果图来看, 4种建筑垃圾均被成功识别, 其中防尘布、 瓦砾砂石和白色塑料的识别结果较好, 但地基渣土仍存在着部分漏分现象。
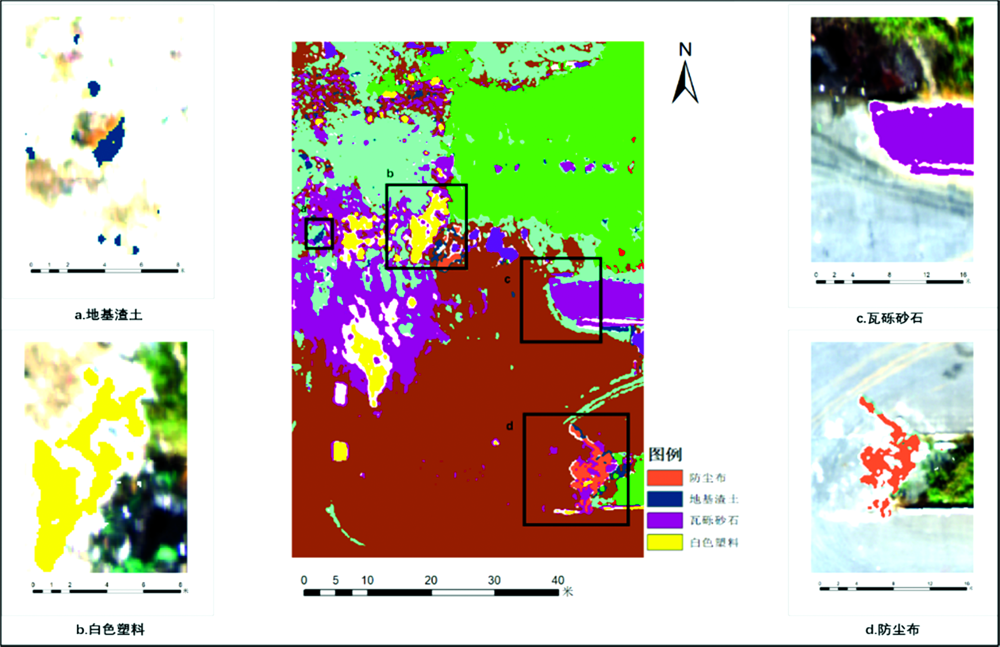 | 图7 建筑垃圾识别结果Fig.7 Identification results for construction waste |
针对6种背景地物和4种建筑垃圾, 基于影像像元分别选取20个验证样本点, 建立混淆矩阵, 对分类结果的精度进行定量评价。 建立的混淆矩阵如表3所示。
| 表3 建筑垃圾分类结果混淆矩阵 Table 3 Confusion matrix for construction waste classification |
由表3可知, 对背景地物进行分离时, 6种背景地物的生产者精度均达到80%及以上, 芦苇、 蒿子、 水体和柏油路的用户精度均达到95%及以上, 6种背景地物均可以很好地被分离出来; 由表3和图6可以看出, 对背景地巷进行分离时, 仍存在部分验证样本点被错分的现象: 对于水体, 选取的20个验证样本点中, 有4个点被错分为阴影, 这是由于养殖池塘部分近岸水体被蒿子的阴影覆盖, 并且水体和阴影的光谱反射率均较低易产生错分所导致的; 对于蒿子, 由于本次试验是在9月份进行, 此时蒿子进入花期和果期的交替期, 部分蒿子茎基部及下部的叶片脱落提前进入果期, 植株整体的光谱反射率发生变化, 并且蒿子为一年生草本植被属于灌木的一种, 较为贴近地面, 因此导致选取的20个验证样本点, 有3个点被错分为裸土; 对于柏油路, 选取的20个验证样本点, 有一个点被错分为裸土, 分析是由柏油路表面部分区域被裸土覆盖导致的。
针对4种建筑垃圾的识别, 生产者精度都在90%以上, 对于防尘布, 选取的20个验证样本点中, 有1个点被错分为瓦砾砂石, 分析是由于防尘布部分表面粘带有碎瓦砾导致的。 防尘布、 地基渣土和瓦砾砂石三种建筑垃圾的用户精度均在90%以上, 而白色塑料的用户精度为75%, 分析是由于白布与白色塑料的光谱反射率较为接近, 使得决策树分类器自动将位于白布上的像元验证点错分为白色塑料, 导致白色塑料的分类用户精度相对较低。
基于获取的研究区无人机高光谱遥感影像, 分别提取研究区内6种背景地物和4种建筑垃圾的光谱信息, 制作光谱曲线, 根据不同类型地物之间的光谱曲线差异, 确定特征波段, 采用决策树分类法分别建立背景地物分离决策树和建筑垃圾识别决策树, 能够很好的分离研究区内6种背景地物和精确识别4种不同类型建筑垃圾, 但在无人机高光谱数据采集过程中, 仍存在部分问题尚未得到解决: 由于研究区内复杂的环境, 以及影像采集过程中, 太阳入射角度、 仪器观测角度等众多因素都会对地物反射率产生影响, 可能会导致同物异谱、 异物同谱等现象发生, 必然会对影像的分类精度造成影响。 针对特征波段选取问题, 后续研究中将采用诸如一阶微分、 二阶微分法等方法对不同建筑垃圾的原始光谱进行运算, 在一定程度上放大原始光谱反射率曲线的变化速率、 强度以及吸收特性等光谱特征, 便于快速、 准确地选择出最佳特征波段, 提高决策树模型的效率和精度, 为未来精确、 快速和高效完成建筑垃圾的分类回收提供一定的技术支持。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|