



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
利用无人机多源传感器估算马铃薯植株氮含量
[樊意广1, 3, 5  , 冯海宽
, 冯海宽1, 2, 3, * , 刘杨1, 3, 4 , 边明博1, 3 , 赵钰1, 3 , 杨贵军1, 3 , 钱建国5 ]
, 冯海宽, 刘杨|
|


作者简介: 樊意广, 1993年生, 北京市农林科学院信息技术研究中心硕士研究生 e-mail: fyglngd@163.com
快速准确地获取作物的植株氮含量(PNC)信息, 是农业精细化管理的关键和数字农业发展的研究热点。 近年来, 随着无人机和传感器技术的发展, 利用多种传感器信息监测作物理化参数逐渐引起国内外学者的关注。 以马铃薯为研究对象, 首先, 基于无人机获取了马铃薯现蕾期、 块茎形成期、 块茎增长期、 淀粉积累期和成熟期的高光谱影像和数码影像, 同时采集各生育期的地面数码影像, 并实测了株高( H)、 PNC和11个地面控制点(GCPs)的三维空间坐标。 其次, 利用无人机数码影像结合GCPs生成试验区域的数字表面模型(DSM), 分别从无人机数码影像和DSM中提取马铃薯的地面覆盖度( VCuav)和株高( Hdsm), 并利用地面数码影像计算的覆盖度( VC)和实测 H验证提取的 VCuav和 Hdsm的精度。 然后, 根据高光谱反射率数据计算绿边参数(GEPs), 构造GEPs× Hdsm× VCuav, GEPs/(1+ VCuav), (GEPs+ VCuav)× Hdsm和GEPs/(1+ Hdsm) 4种融合特征参数(FFPs), 对高光谱影像信息和数码影像信息进行融合。 最后, 将各生育期提取的GEPs和构造的FFPs分别与PNC作相关性分析, 筛选最优绿边参数(OGEP)和最优融合特征参数(OFFP)构建5个生育期的PNC线性估算模型, 并根据相关性较高的GEPs和FFPs利用偏最小二乘(PLSR)和人工神经网络(ANN) 2种回归方法构建PNC的多参数估算模型, 结果表明: (1)基于无人机数码影像提取的 Hdsm和 VCuav具有较高的精度, 可以代替实测 H和 VC估算作物理化参数。 (2)与GEPs相比, 前4个生育期, 构造的大部分FFPs与PNC的相关性更高, 能更好地反映马铃薯的氮营养状况。 (3)马铃薯5个生育期, OFFP估算PNC的效果优于OGEP。 (4)与单参数模型相比, 基于GEPs和FFPs利用PLSR和ANN 2种方法构建的模型精度和稳定性均明显提高, 其中, 以FFPs为模型因子利用ANN方法构建的模型效果最好。 该研究表明融合高光谱绿边参数和高清数码相机传感器提取的株高和覆盖度信息能显著提升PNC的估算精度, 可为马铃薯氮营养状况的动态无损监测和多源传感器信息的应用提供参考。
, FENG Hai-kuan, LIU YangAcquiring the plant nitrogen content (PNC) information of crops quickly and accurately is the key to agricultural meticulous management and a research hotspot in the development of digital agriculture. In recent years, with the development of UAV and sensor technology, the use of various sensor information to monitor the physical and chemical parameters of crops has gradually attracted the attention of scholars at home and abroad. This study takes potato as the research object. Firstly, based on the UAV, the hyperspectral images and digital images of the potato budding stage, tuber formation stage, tuber growth stage, starch accumulation stage and maturity stage were obtained. At the same time, the digital camera was used to synchronously obtain the ground digital images of five growth periods, and the three-dimensional spatial coordinates of eleven ground control points (GCPs) and plant height ( H), PNC were measured. Secondly, the digital surface model (DSM) of the test area was generated by using UAV digital images combined with GCPs. The accuracy of the extracted VCuav and Hdsm is verified by the calculated coverage ( VC) of the digital image and the measured H. Then, the green edge parameters (GEPs) were calculated according to the hyperspectral images, and four fusion feature parameters (FFPs) of GEPs× Hdsm* VCuav, GEPs/(1+ VCuav), (GEPs+ VCuav)× Hdsm and GEPs/(1+ Hdsm) were constructed, fusion of hyperspectral image information and digital image information. Finally, the correlation between GEPs extracted and FFPs constructed in each growth period with PNC were analyzed, and the PNC linear estimation models of five growth periods were constructed based on the optimal GEP and optimal FFP respectively. According to the GEPs and FFPs with high correlation, the multiple parameters estimation models of PNC were constructed by using partial least squares (PLSR) and artificial neural network (ANN). The results show that: (1) Hdsm and VCuav extracted from UAV digital images have high accuracy , which can replace the measured H and VC to estimation physical and chemical parameters (2) Compared with GEPs, most of the constructed FFPs have stronger correlation with PNC in the first four growth stages, and could better reflect the nitrogen nutrition status of potato. (3) Linear estimation models of potato PNC were constructed based on the optimal green edge parameter (OGEP) and the optimal fusion feature parameter (OFFP), respectively. The results showed that the effect of OFFP in estimating PNC was better than that of OGEP. (4) Compared with the single-parameter model, the accuracy and stability of the model constructed by using PLSR and ANN based on GEPs and FFPs are significantly improved. Among them, the models constructed with FFPs as the model factor have the best effect. (5) The ANN method is better than the PLSR method in estimating PNC in each growth period. Therefore, the fusion of the hyperspectral green edge parameters and the plant height and coverage information extracted by the high-definition digital camera sensor can improve the estimation accuracy of PNC, which provide a reference for the non-destructive dynamic monitoring of potato nitrogen nutrition status and the application of multi-source sensors information.
氮素是作物生长过程中不可或缺的营养元素, 合理的氮肥供应是保证作物正常生命活动的物质基础。 植株氮含量(plant nitrogen content, PNC)是表征作物氮素营养状况的重要指示因子; 快速准确地获取作物的PNC信息有助于科学、 高效地制定氮肥管理策略, 提高氮肥利用效率及降低环境污染[1]。 传统的PNC测量方法主要是田间取样与实验室测试相结合, 虽然结果准确, 但具有一定的破坏性, 且耗时费力, 无法满足数字农业快速、 高效和大范围监测的要求。 近年来, 遥感技术的迅速发展, 为作物氮营养状况的高效无损监测提供了一种新的技术手段[2]。
与卫星和地面遥感技术相比, 无人机成像技术具有操作简单、 分辨率高和成本低等优点, 已成为数字农业的重要技术支撑[3]。 目前, 以无人机为遥感平台监测作物理化参数常用的传感器主要有高光谱、 多光谱和数码相机等, 国内外学者就不同传感器监测作物理化参数的性能做了大量研究。 结果表明, 不同类型传感器监测作物理化参数的性能不同, 仅利用单一传感器监测作物理化参数具有一定的局限性[4, 5, 6]。 例如高光谱传感器虽然波段数目众多, 可获得大量与作物理化性质密切相关的特征参数, 如红边和绿边等, 但存在空间分辨率低, 无法获取作物详细的空间结构特征等不足, 无法避免单一光谱特征在作物高覆盖度条件下估算理化参数可能出现的饱和现象[7]。 而多光谱和数码相机传感器虽然空间分辨率高, 可以高精度地获取作物的空间结构特征, 如株高和纹理等, 但受波段数目的制约, 无法提供足够的与作物理化性质密切相关的光谱信息。
为解决上述问题, 充分利用多种传感器的优势, 一些学者尝试利用多种传感器信息监测作物的理化参数。 如Kefauver等[8]利用数码影像数据和多光谱影像数据探究了不同施氮水平对大麦品质的影响, 结果表明多光谱影像指数对多元模型的贡献大于数码影像指数。 Yue等[9]探究了地面高光谱数据、 无人机数码影像数据和无人机高光谱数据与株高结合估算作物长势参数的性能, 结果显示, 株高的加入能明显提高光谱指数估算冬小麦地上生物量的能力。 Xu等[10]利用无人机搭载数码相机传感器和多光谱传感器分别获取了冬小麦的覆盖度信息和多光谱影像指数, 并构建了覆盖度调整光谱指数, 用于估算冬小麦的叶片氮含量, 结果显示, 无人机多光谱指数结合数码相机提取的覆盖度信息能有效提高估算模型的精度和稳定性。
以上研究表明, 株高和覆盖度的加入可以提高作物理化参数的估算精度, 但现有的大多数研究都是将二者与不同传感器获取的光谱指数作为单独变量直接输入到理化参数的估算模型中, 尝试融合不同传感器获取的信息的较少, 将无人机高光谱获取的红边和绿边等特征参数, 与无人机高清数码相机获取的株高和覆盖度信息融合监测作物的氮素营养状况的研究更是鲜有报道。
已有的研究表明, 相较于红边区域, 绿边与作物的理化性质联系更加紧密, 在监测作物理化参数方面的应用更广泛[11, 12]。 因此, 以马铃薯为研究对象, 基于无人机高光谱反射率数据, 提取了8个绿边参数(green edge parameters, GEPs), 分别与无人机数码影像提取的株高和覆盖度信息融合, 构造了GEPs× Hdsm× VCuav, GEPs/(1+VCuav), (GEPs+VCuav)× Hdsm和GEPs/(1+Hdsm) 4种融合特征参数(fusion feature parameters, FFPs), 并利用偏最小二乘(partial least squares regression, PLSR)和人工神经网络(artificial neural networks, ANN)2种算法, 着重探讨了绿边参数融合株高和覆盖度估算马铃薯植株氮含量的潜力, 以期为马铃薯氮营养状况的高效无损监测提供一种新的技术支撑。
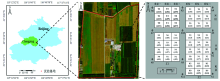
马铃薯试验田位于北京市昌平区小汤山镇国家精准农业研究示范基地(40° 10'34″N, 116° 26'39″E), 该地平均海拔为36 m, 属暖温带半湿润大陆性气候。 马铃薯试验采用正交试验设计, 试验方案详情见文献[12]。 为避免不同生育期试验田位置偏差对试验结果的影响, 于试验小区周围埋设了11个地面控制点(ground control point, GCPs), 并利用高精度的GPS测定各GCP的三维坐标。 具体的试验设计如图1所示。
 | 图1 马铃薯田间位置及试验设计Fig.1 Potato field location and experiment design |
以无人机为遥感平台, 搭载高清数码相机传感器和高光谱传感器分别于2019年5月13日、 5月28日、 6月10日、 6月20日和7月3日开展飞行作业, 获取马铃薯现蕾期至成熟期5个生育期的数码影像和高光谱影像数据。 2种传感器的具体参数如表1所示。 为避免光照对试验结果的影响, 选择正午12:00— 14:00开展飞行作业, 无人机的飞行高度设置为20 m, 且配备高精度的位置与姿态测量系统, 以获得试验区域的精确位置。
| 表1 传感器参数 Table 1 Sensor parameters |
高光谱影像的预处理在Cubert-Pilot和PhotoScan软件中完成, 主要包括影像的校正、 拼接和融合等。 数码影像的预处理在PhotoScan中完成, 主要包括影像的对齐与校正、 生成点云、 构建网格和纹理, 最终生成试验区域的数字表面模型(digital surface model, DSM)和数字正射影像(digital orthophoto map, DOM)。
地面数据的采集与无人机飞行作业同步开展。 采集内容包括各生育期的实测株高(height, H)、 实测覆盖度(vegetation coverage, VC)和PNC数据。 其中H的测量方法为: 在每个小区选取4株能代表整体长势的马铃薯植株, 量取自然状态下叶顶端到茎基的距离, 取其平均值作为该小区马铃薯植株的H值。 VC的测量方法借鉴了吴智超等[13]的思路, 首先基于型号为G16的数码相机(有效像素为1 200万), 分别获取马铃薯5个生育期冠层上方约1.5 m处的数码影像。 其次利用“ 色度-饱和度-亮度” (hue-saturation-intensity, HSI)颜色空间对研究区进行转换处理, 再利用过绿植被指数(excess green vegetation index, EXG)对HSI处理的结果进行绿色植被处理。 然后采用最大类间方差阈值和形态学阈值的方法剔除土壤背景和杂草噪声。 最后每个研究小区内植被的像素数与小区内总像素数的比值即该小区的VC值。 PNC通过实验室测量获取; 每个试验小区选取能代表整体长势的植株3株, 将其茎叶分离后105 ℃杀青0.5 h, 之后在80 ℃条件下干燥至恒质量得到样本的干质量, 然后利用凯氏定氮仪测定叶和茎部分的全氮含量, 最后根据样本的干质量计算各个小区的PNC值[14]。
在502~554 nm范围内, 由于植被叶片自身特性和内部结构的影响, 光谱反射率由低谷区缓慢增加到峰值区, 形成绿色植物特有的绿边特征, 常用于作物理化参数的监测。 选取了绿边最大反射率(Rmax)、 绿边反射率总和(Rsum)、 绿边面积(SDg)、 绿边位置(GEP)、 绿边振幅(Dg)、 最小振幅(Dgmin)、 绿边振幅/最小振幅(Dg/Dgmin)和绿边一阶导数总和(Dsum)8个GEPs。 其中, SDg表示绿边区域内光谱曲线包围的面积, GEP表示绿边区域一阶导数最大处对应的波长, Dg和Dgmin分别表示绿边区域一阶导数的最大值和最小值。 为充分利用高光谱传感器波段信息丰富和数码相机传感器高分辨率的优点, 基于选取的无人机高光谱GEPs和无人机数码影像提取的Hdsm和VCuav构造GEPs* Hdsm× VCuav, GEPs/(1+VCuav), (GEPs+VCuav)× Hdsm和GEPs/(1+Hdsm) 4种共32个融合特征参数进行马铃薯PNC的监测。
为提取马铃薯的株高, 于2019年4月20号采集了马铃薯试验田裸土状态下的数码影像, 并结合GCPs生成该时期的DSM, 在ArcGIS软件中将不同生育期的DSM与裸土期的DSM进行差值运算, 最后利用感兴趣区工具提取每个小区的株高, 将其平均值作为该小区的Hdsm。 马铃薯覆盖度的提取在ENVI软件中完成, 首先利用EXG指数通过双峰法求取植被与土壤背景的阈值, 然后对影像进行二值化处理, 最终以植被像素点个数与总像素点个数的比值作为该小区的VCuav。
采用偏PLSR和ANN两种方法构建马铃薯PNC估算模型。 PLSR是一种可以提供多对多的回归模型。 特别是当自变量个数较多并存在一定的自相关性, 而因变量个数较少时, 通过PLSR构建的模型效果要优于传统回归分析。 ANN能够模拟动物脑神经元的行为特征, 根据输出值与期望值之间的误差对各神经元间的权值进行不断修正, 从而达到非线性映射的目的。
每个生育期获取48组数据, 在回归分析中, 采用32组数据(重复1和重复3)作为建模集, 16组数据(重复2)作为验证集, 构建马铃薯PNC的估算模型。 选用决定系数(R2)、 均方根误差(RMSE)和标准均方根误差(NRMSE)评价模型的性能。
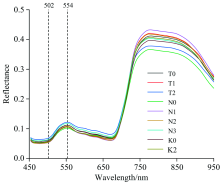
采用卷积平滑滤波(Savizky-Golag, SG)对原始高光谱反射率进行平滑校正, 以减少环境噪声、 传感器随机误差等对马铃薯冠层高光谱反射率的影响。 以块茎形成期为例, 不同处理小区校正后的光谱反射率曲线如图2所示。 由图2可知, 马铃薯冠层反射率具有典型的绿色植被光谱特征。 在选取的绿边区域内, 光谱反射率缓慢上升, 在550 nm附近出现“ 绿峰” 特征, 可以较好地区分环境背景和植被特征。
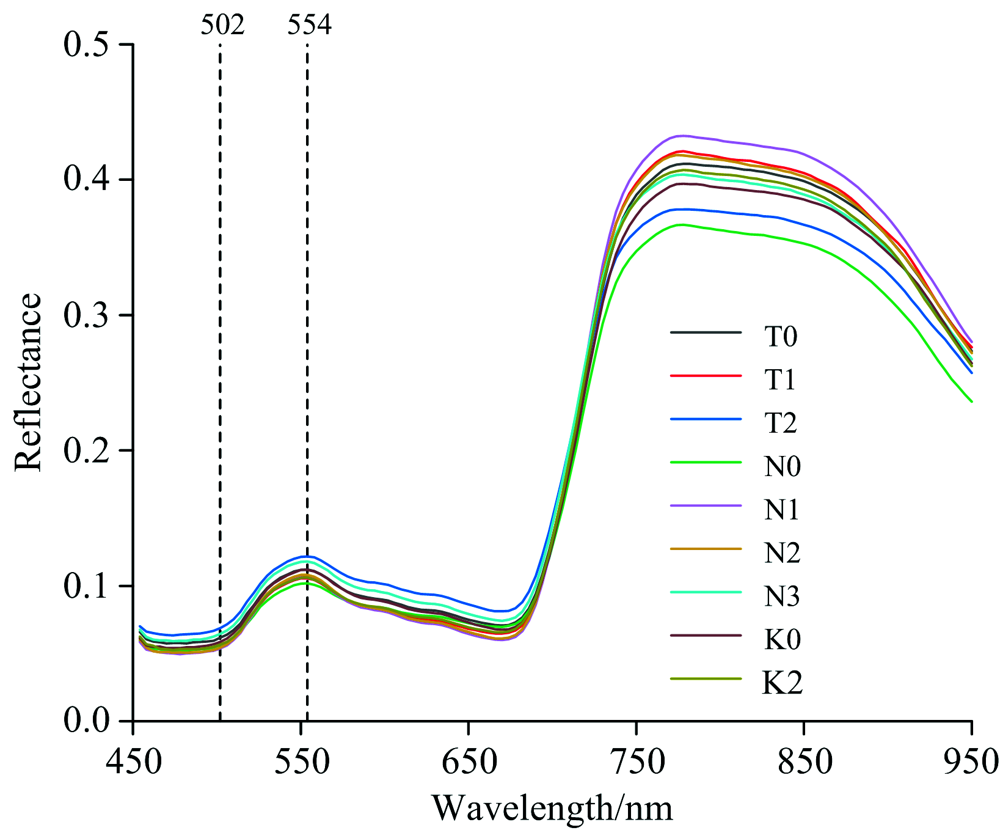 | 图2 马铃薯块茎形成期光谱反射率曲线Fig.2 Spectral reflectance curves of potato in tuber formation period |
通过马铃薯各生育期DSM与裸土期DSM之间的差值运算, 得到5个生育期共240组Hdsm数据, 将其与实测的H进行线性拟合, 结果如图3所示。 由图3可知, 提取的Hdsm与实测H拟合的决定系数为0.86, RMSE为2.66 cm, NRMSE为10.23%, 表明基于DSM提取的Hdsm具有可靠的精度, 可以代替实测H估算作物的理化参数。
 | 图3 马铃薯提取株高与实测株高对比分析Fig.3 Comparative analysis of extracted plant height and measured plant height of potato |
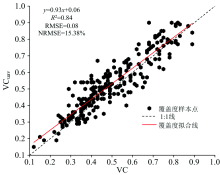
基于马铃薯5个生育期的无人机数码影像和地面数码影像, 分别获取240组提取VCuav数据和实测VC数据, 将二者进行线性拟合得到如图4所示的结果。 由图4可知, 5个生育期VCuav和VC的拟合决定系数为0.84, RMSE为0.08, NRMSE为15.38%, 表明基于无人机数码影像提取的VCuav具有较高的精度, 可以代替实测VC估算作物的理化参数。
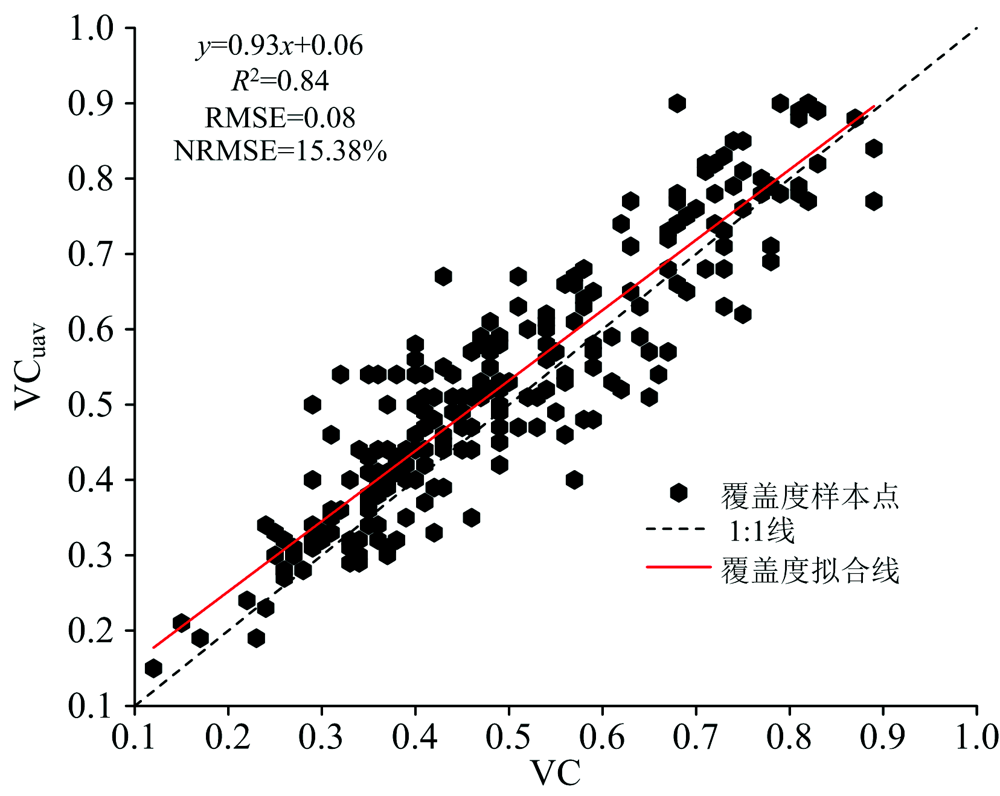 | 图4 马铃薯提取覆盖度与实测覆盖度对比分析Fig.4 Comparative analysis of potato extraction coverage and measured coverage |
根据马铃薯高光谱反射率数据, 提取各生育期的GEPs, 并基于GEPs和无人机数码影像提取的Hdsm及VCuav构造GEPs× Hdsm× VCuav, GEPs/(1+VCuav), (GEPs+VCuav)× Hdsm和GEPs/(1+Hdsm) 4种FFPs, 将各生育期获取的GEPs和FFPs分别与对应生育期的PNC进行相关性分析, 结果如图5所示。 由图5可知, 马铃薯5个生育期, 大部分GEPs和FFPs与PNC均达到0.01相关水平, 相关性表现较好。 其中, 现蕾期共有6个GEPs与PNC的相关性达到0.01相关水平, 相关性从小到大依次为Dgmin, Dg, Rsum, SDg, Rmax和Dsum, 相关系数绝对值介于0.60~0.79之间, 而相关性位于前6的FFPs分别为Dg/1+Hdsm, Dsum/1+Hdsm, SDg/1+Hdsm, Rmax/1+VCuav, Dsum/1+VCuav和SDg/1+VCuav, 相关系数绝对值介于0.71~0.84之间。 块茎形成期共有Rmax, Dg, Dgmin, SDg和Dsum 5个GEPs与PNC的相关性达到0.01相关水平, 相关系数绝对值介于0.37~0.72之间, 而相关性位于前5的FFPs分别为(Rmax+VCuav)× Hdsm, Dsum/1+Hdsm, SDg/1+Hdsm, Dsum/1+VCuav和SDg/1+VCuav, 相关系数绝对值位于0.75~0.85之间。 块茎增长期共有Dgmin, Rsum, Rmax和Dg/Dgmin 4个GEPs与PNC达到0.01相关水平, 相关系数绝对值介于0.63~0.68之间, 而相关性位于前4的FFPs分别是Dg/Dgmin× VCuav× Hdsm, Rmax/1+VCuav, SDg/1+VCuav和Dsum/1+VCuav, 相关系数绝对值介于0.70~0.88之间。 淀粉积累期共有Dgmin, Rsum和Rmax 3个GEPs与PNC达到0.01相关水平, 相关系数绝对值介于0.39~0.69之间, 而相关性位于前3的FFPs分别为Dg/1+VCuav, SDg/1+VCuav和Dsum/1+VCuav, 相关系数绝对值介于0.66~0.74之间。 成熟期共有Rsum, Dg, Rmax, SDg和Dsum 5个GEPs与PNC达到0.01相关水平, 相关系数绝对值介于0.52~0.68之间, 而相关性位于前5的FFPs分别为Dsum× VCuav× Hdsm, SDg× VCuav× Hdsm, Dg/1+VCuav, Dsum/1+VCuav和Dg/1+VCuav, 相关系数介于0.49~0.56之间。 由以上分析可知, 马铃薯前4个生育期, 构造的大部分FFPs与PNC的相关性明显高于GEPs, 表明FFPs与作物PNC联系更紧密, 能更好地反映作物氮素营养的动态变化。
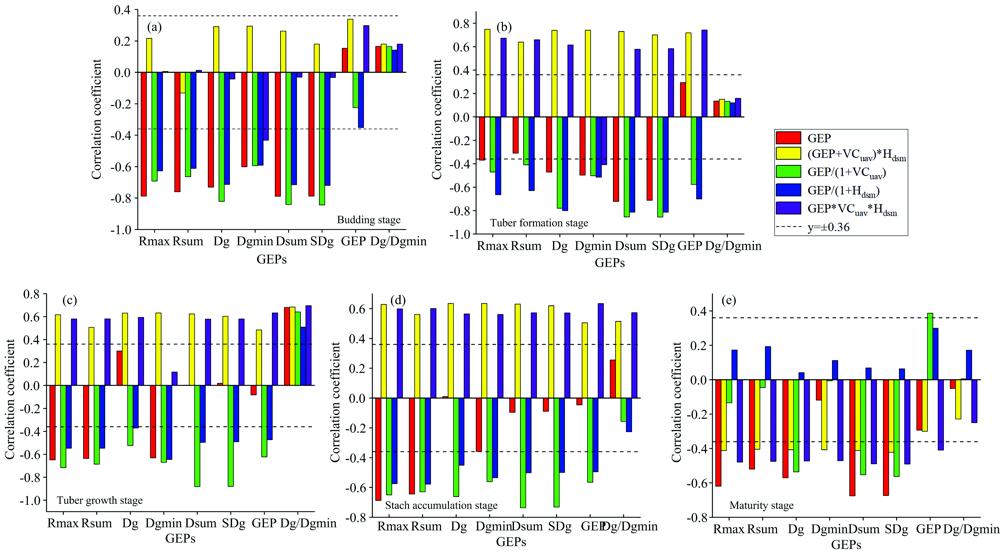 | 图5 不同生育期植株氮含量与提取参数相关性分析结果 注: 虚线为0.01相关水平线Fig.5 Correlation analysis results of extraction parameters and plant nitrogen content at different growth stages Note: dotted line represents the correlation significant at 0.01 level |
2.5.1 单参数估算马铃薯植株氮含量
基于各生育期挑选的最优绿边参数(optimal GEP, OGEP)和最优融合特征参数(optimal FFP, OFFP), 利用一元线性回归建立5个生育期的PNC估算模型, 以探究OGEP和OFFP估算马铃薯PNC的能力。 通过建模集和验证集数据得到各生育期模型的精度指标如表2和表3所示。 由表2可知, 基于OGEP构建的马铃薯PNC估算模型现蕾期精度最好, 建模和验证的R2分别为0.54和0.77, RMSE分别为0.55和0.37, NRMSE分别为14.97%和14.21%, 成熟期模型精度最差, 建模和验证的R2分别为0.49和0.31, RMSE分别为0.37和0.37, NRMSE分别为14.02%和14.33%。 总的来说, 各生育期的OGEP具有一定估算马铃薯PNC的能力, 但构建的模型精度普遍不高。
| 表2 最优绿边参数估算马铃薯PNC结果 Table 2 PNC of potato estimated by using optimal green edge parameter |
| 表3 最优融合特征参数估算马铃薯PNC结果 Table 3 Estimated values of potato PNC with optimal fusion feature parameters |
由表3可知, 基于OFFP构建的马铃薯5个生育期的PNC估算模型块茎增长期精度最好, 建模和验证的R2分别为0.78和0.76, RMSE分别为0.28和0.25, NRMSE分别为10.52%和11.14%, 成熟期精度最差, 建模和验证的R2分别为0.30和0.47, RMSE分别为0.43和0.38, NRMSE分别为16.47%和16.43%。 总的来说, 基于OFFP构建的马铃薯PNC估算模型前4个生育期估算效果良好, 精度和稳定性较高, 但成熟期模型的精度较低。
2.5.2 多参数估算马铃薯植株氮含量
为评估多个绿边参数和融合特征参数估算马铃薯PNC的能力, 分别基于各生育期与PNC达到0.01相关水平的GEPs及相同个数的FFPs, 采用PLSR和ANN两种方法构建马铃薯5个生育期的PNC估算模型, 结果如表4所示。 由表4可知, 以GEPs为模型变量, 利用PLSR和ANN 2种方法建立的马铃薯PNC估算模型前3个生育期的精度较高, 而淀粉积累期和成熟期的模型精度有所下降。 而以FFPs为模型变量构建的模型前4个生育期的模型精度较高, 成熟期的模型精度较低。 与单个模型参数构建的PNC估算模型相比, 多参数构建的模型的精度和稳定性更高, 且以FFPs为模型变量, 构建的模型精度优于GEPs。 为进一步确定马铃薯PNC的最佳估算模型, 以FFPs为模型变量, 分别绘制基于PLSR和ANN两种方法的马铃薯5个生育期PNC实测值与预测值的散点图, 如图6和图7所示。
| 表4 基于PLSR和ANN方法估算马铃薯不同生育期PNC Table 4 PNC estimations of potato at different growth stages by using PLSR and ANN |
 | 图6 基于FFPs利用PLSR估算马铃薯PNC效果Fig.6 PNC estimation of potato based on FFPs using PLSR |
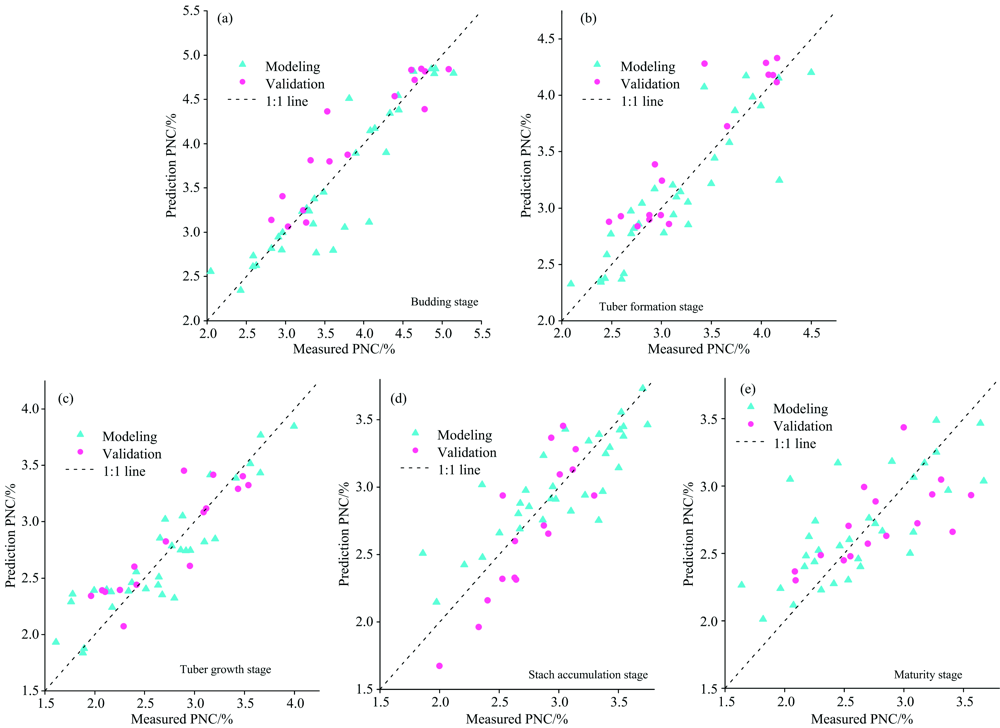 | 图7 基于FFPs利用ANN估算马铃薯PNC效果Fig.7 PNC estimation of potato based on FFPs using ANN |
综合表4、 图6和图7可知, 各生育期以同种模型变量基于ANN构建的PNC估算模型的建模R2均高于PLSR方法, RMSE和NRMSE均低于PLSR方法, 且以FFPs为模型变量, 基于ANN方法的5个生育期的预测值与实测值分布更接近1:1线, 模型的精度和稳定性最好。
由相关性分析结果(图5)可知, 马铃薯5个生育期, 构建的大部分GEPs均与PNC达到0.01相关水平, 且前3个生育期的相关性明显高于后2个生育期, 表明绿边区域与PNC的联系较为紧密, 且生长前期相关性高于生长后期。 分别基于OGEP和GEPs构建马铃薯PNC的估算模型, 结果(表2、 表4)也表明, 前3个生育期的模型精度高于后2个生育期, 其原因是随着马铃薯生长进程的推进, 由淀粉积累期到成熟期马铃薯植株逐渐凋零枯萎, 马铃薯叶片内叶绿素浓度不断降低, 对绿光的反射能力变弱, 绿边区域与PNC的敏感性降低, 以GEPs构建的马铃薯PNC估算模型的精度也因此降低。
为探究融合特征参数估算马铃薯植株氮含量的性能, 首先基于无人机数码影像提取了作物的株高和覆盖度, 由图3和图4可知, 基于无人机数码影像提取的Hdsm和VCuav精度可靠, 可以用于作物理化参数的估算。 由各生育期的FFPs与PNC的相关性分析结果(图5)可知, 前4个生育期, 构造的大部分FFPs与PNC的相关性明显高于GEPs。 由表3和表4可知, 前4个生育期的OFFP与PNC的相关性显著高于OGEP, 且基于OFFP和FFPs构建的PNC估算模型的精度和稳定性均显著优于OGEP和GEPs, 而在成熟期, 模型的精度没有提升。 这表明, 前4个生育期FFPs与PNC的联系更紧密, 其原因是, 相较于GEPs, FFPs融合了高光谱绿边参数、 高清数码相机获取株高和覆盖度, 包含了作物冠层和垂直结构2个层次的变化信息, 而PNC由茎和叶2部分的氮含量组成, 因此, FFPs与作物PNC的联系更紧密, 能更好地反映PNC的动态变化, 且覆盖度的加入, 在一定程度上能消除土壤背景等的影响[15], 因此马铃薯前4个生育期基于FFPs估算PNC的效果优于GEPs, 而成熟期, 由于连天大雨的影响, 大部分马铃薯植株迅速凋零枯死, 此时提取的株高和覆盖度信息不能反映真实的PNC状况, 因此这一时期构建的FFPs与PNC的相关性明显降低, 构建的PNC估算模型的精度也明显降低。 此外, 由5个生育期的OFFP和参与建模的FFPs可知, 由GEPs/(1+VCuav)构建的FFPs与PNC的相关性更强, 对马铃薯PNC估算模型的贡献最大, 这与Yao等[14]利用高光谱植被指数与地面数码相机获取的覆盖度估算冬小麦叶片氮含量得到的结论一致, 其原因是植被覆盖度的加入能很大程度上消除土壤背景的影响, 增强了GEPs与作物氮状况的敏感性。
为探究OGEP和OFFP估算马铃薯PNC的效果, 首先利用一元线性回归构建马铃薯5个生育期的PNC估算模型, 由表2和表3可知, 与基于GEPs和FFPs构建的模型相比, 基于最优模型参数构建的模型的精度和稳定性较差, 说明多参数估算作物理化参数的能力高于单个模型参数, 这与Han等[16]估算玉米地上生物量得到的结论一致。 其原因是多参数能够提供更丰富的与氮相关的信息, 从而能够更好地反映PNC的变化。 基于GEPs和FFPs, 分别采用PLSR和ANN 2种方法构建马铃薯的PNC估算模型, 由表4可知, 基于2种方法构建的模型均表现为FFPs明显优于GEPs, 说明融合绿边参数和株高、 覆盖度构建的FFPs与PNC的联系更紧密, 能明显提高估算作物PNC的精度, 可为作物氮营养状况的监测和多源传感器信息的应用提供参考; 而基于同种模型因子时, ANN方法显示出更好的估算性能, 其原因是神经网络算法在处理非线性问题方面具有明显的优势和强大的容错能力, 提高了估算模型的精度。
利用无人机搭载高光谱和数码相机2种传感器, 探究了高光谱绿边参数融合株高及覆盖度信息估算马铃薯植株氮含量的能力, 结果表明: (1)基于无人机数码影像提取的Hdsm和VCuav与实测H和VC的拟合R2分别是0.86和0.84, 表明提取的Hdsm和VCuav精度可靠, 可以用于估算作物的理化参数。 (2)与原始无人机高光谱GEPs相比, 利用GEPs与无人机数码影像提取的Hdsm和VCuav构造的大部分FFPs与马铃薯PNC的相关性更高, 能更好地反映马铃薯的氮营养状况。 (3)在马铃薯前4个生育期, 基于OFFP和FFPs构建的模型明显优于OGEP和GEPs, 其中, 以FFPs为模型因子构建的模型效果最好。 (4)利用ANN方法估算各生育期PNC的效果优于PLSR方法。 该研究可为马铃薯氮营养状况的无损动态监测和多源传感器信息的应用提供参考。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|