
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
融合拉曼散射光和荧光信号反演海面溢油厚度的算法研究
[崔永强1  , 孔德明
, 孔德明2, * , 马勤勇1 , 谢贝贝1 , 张晓丹1 , 孔德瀚3 , 孔令富1 ]
, 孔德明, 马勤勇|
|


作者简介: 崔永强, 1979年生, 燕山大学信息科学与工程学院博士研究生 e-mail: hbyd_yqc@sina.com
随着海洋溢油问题的日益严重, 多种遥感技术被用于海面溢油监测, 其中激光诱导荧光(LIF)技术是目前被认为最有效的海面溢油探测技术之一。 Hoge等基于LIF技术提出了一种利用拉曼散射光评估薄油膜厚度的积分反演算法并广泛应用于海面溢油探测, 针对该算法存在误差较大的问题, 提出一种融合拉曼散射光和荧光信号评估海面溢油厚度的反演算法。 首先利用拉曼散射光信号反演油膜厚度, 然后利用该反演结果计算获取溢油油品的荧光特征光谱, 最后利用荧光信号反演油膜厚度。 文中推导了利用荧光信号反演油膜厚度的算法, 给出了油品荧光特征光谱的逼近算法, 并给出了利用荧光信号反演油膜厚度的误差分析。 通过实验对该方法进行了验证, 选用原油和柴油为实验油品, 以波长405 nm的激光作为激发光源, 采集波长范围为420~700 nm, 采集了海水的背景荧光和拉曼散射光信号、 实验油品2, 5, 10和20 μm等不同厚度油膜的光谱信号。 将采集数据分为训练集和测试集, 利用训练集数据采用梯度下降法获取油品的荧光特征光谱, 利用测试集数据分别采用积分拉曼法和该方法反演油膜厚度。 采用积分拉曼法, 原油不同厚度油膜反演结果的平均误差分别为12.6%, 4.6%, 4.4%和2.3%, 柴油不同厚度油膜反演结果的平均误差分别为14.0%, 7.0%, 4.2%和3.6%; 采用本文方法, 原油不同厚度油膜反演结果的平均误差分别为2.5%, 2.2%, 1.2%和1.1%, 柴油不同厚度油膜反演结果的平均误差分别为3.0%, 2.4%, 2.7%和1.6%。 实验结果表明, 2 μm油膜反演结果的误差降低最多, 原油和柴油2 μm油膜的反演结果误差分别由12.6%和14.0%降低为2.5%和3.0%, 其他厚度油膜反演结果的误差也有较大程度的降低, 油膜厚度反演结果的误差均小于3%, 采用本文算法可以有效提高油膜厚度反演结果的精度。
, KONG De-ming, MA Qin-yongAs the problem of marine oil spills becomes more and more serious, a variety of remote sensing technologies are used to monitor oil spills on the sea surface. Among them, Laser-Induced Fluorescence (LIF) technology is considered one of the most effective oil spill detection technologies. Based on LIF technology, Hoge et al. proposed an integral inversion algorithm based on Raman scattering light to evaluate the thickness of thin oil film, which has been widely used in oil spill detection on the sea surface. Given the large error of the algorithm, an inversion algorithm for evaluating the thickness of oil spills on the sea surface is proposed by using Raman scattering light and fluorescence signals. Firstly, the oil film thickness is inversed by Raman scattering light signal, and then the fluorescence feature spectrum of oil is calculated using the inversion result, and finally, the oil film thickness is inversed by using the fluorescence signal. The algorithm for inversion of oil film thickness using fluorescence signal is deduced, the approximation algorithm of oil fluorescence feature spectrum and the error analysis of oil film thickness inversion using fluorescence signal is given. Experiments verify the method, Crude oil and diesel are selected as the experimental oil and the laser with wavelength of 405 nm is used as the excitation source. The collection wavelength range is 420~700 nm. The background fluorescence and Raman scattering spectra of sea water, the fluorescence spectra of 2, 5, 10 and 20 μm oil films are collected. The collected data are divided into a training set and a test set. The fluorescence feature spectrum of the oil is obtained by gradient descent method using the training set data, and the oil film thickness is retrieved by the Raman integration method and the method in this paper respectively, using the test set. Using Raman integral method, the average errors for different thicknesses of crude oil are 12.6%, 4.6%, 4.4% and 2.3%, and the average errors for different thicknesses of diesel oil are 14.0%, 7.0%, 4.2% and 3.6%; Using this method, the average errors for different thickness of crude oil are 2.5%, 2.2%, 1.2% and 1.1%, and the average errors for different thickness of diesel oil are 3.0%, 2.4%, 2.7% and 1.6%. The experimental results show that the errors of the 2 μm oil film inversion results are reduced the most. The errors of the 2 μm oil film inversion results for crude oil and diesel oil are reduced from 12.6% and 14.0% to 2.5% and 3.0%. The errors of the oil film inversion results of other thicknesses are also greatly reduced. The errors of the oil film thickness inversion results are all less than 3%. The algorithm can effectively improve the accuracy of the oil film thickness inversion results.
随着海洋运输业和石油开采业的快速发展, 轮船排污、 运油船只及海上钻井平台泄漏等溢油事故时有发生, 海上溢油污染问题日益严重[1]。 快速高效的溢油探测对溢油污染的快速处理和水体环境的保护具有重要意义[2, 3]。
油膜厚度是海面溢油的重要参数。 海面溢油厚度的评估, 传统方法是根据《波恩协议》油膜色彩与油膜厚度的对应关系人工确定油膜厚度。 近年来多种遥感技术应用于溢油监测, 其中激光诱导荧光(laser induced fluorescence, LIF)技术被认为是最有效的海面溢油探测技术之一[4, 5, 6]。 Kung等提出了利用LIF探测技术评估海面溢油的建模方法[7], Hoge等基于该方法提出了一种利用拉曼散射光评估薄油膜厚度的积分反演算法并进行了溢油探测实验[8]。 我国对海面溢油也开展了大量的研究, 中国海洋大学成功研制了用于海洋参数测量的激光雷达系统并完成水面油膜的探测实验[9]。 然而, 基于拉曼散射光的海面溢油反演算法在反演较薄油膜厚度时存在误差较大的问题, 基于此, 本文提出了一种融合拉曼散射光和荧光信号反演海面溢油厚度的算法, 利用拉曼散射光和荧光信号反演油膜厚度, 提高反演结果的精度, 并通过实验验证了该算法的正确性和有效性。
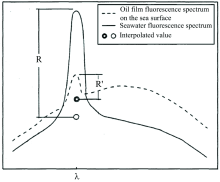
如引言所述, Hoge等提出了一种适用于薄油膜厚度评估的反演算法, 其原理是海水受激光束照射激发的拉曼散射光由于海面油膜的吸收而呈负指数衰减, 依据拉曼散射光的衰减程度反演油膜厚度[8], 该算法原理如图1所示。
 | 图1 海面油膜厚度反演算法原理Fig.1 Principle diagram of inversion algorithm for oil film |
采用LIF探测无溢油覆盖的海面, 探测器接收到清洁海水发射的拉曼散射光信号强度为R, 在海面存在溢油的条件下, 海水的拉曼散射光由于油层的吸收而衰减, 此时探测器接收到的拉曼散射光信号强度为R', 因此油膜厚度d可表示为[8]
式(1)中: ke和kλ 分别为油膜在激发波长和波长λ 处的消光系数; R'为油膜覆盖海面时海水的拉曼峰信号强度; R为纯净海水的拉曼峰信号强度。
设Rr和Rt分别为油膜拉曼信号的插值计算结果和理论值, dr和dt分别为油膜的反演计算厚度和理论厚度, E为拉曼信号的测量误差, E'为反演结果的误差, 即
由式(1)可得
一般情况下, E≪1, 因此, 式(4)可以近似为
由式(5)可得反演结果的误差E'为
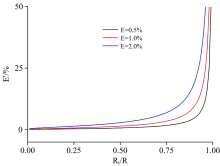
在Rt不同相对误差条件下, 反演结果的误差E'与Rt/R的关系如图2所示。
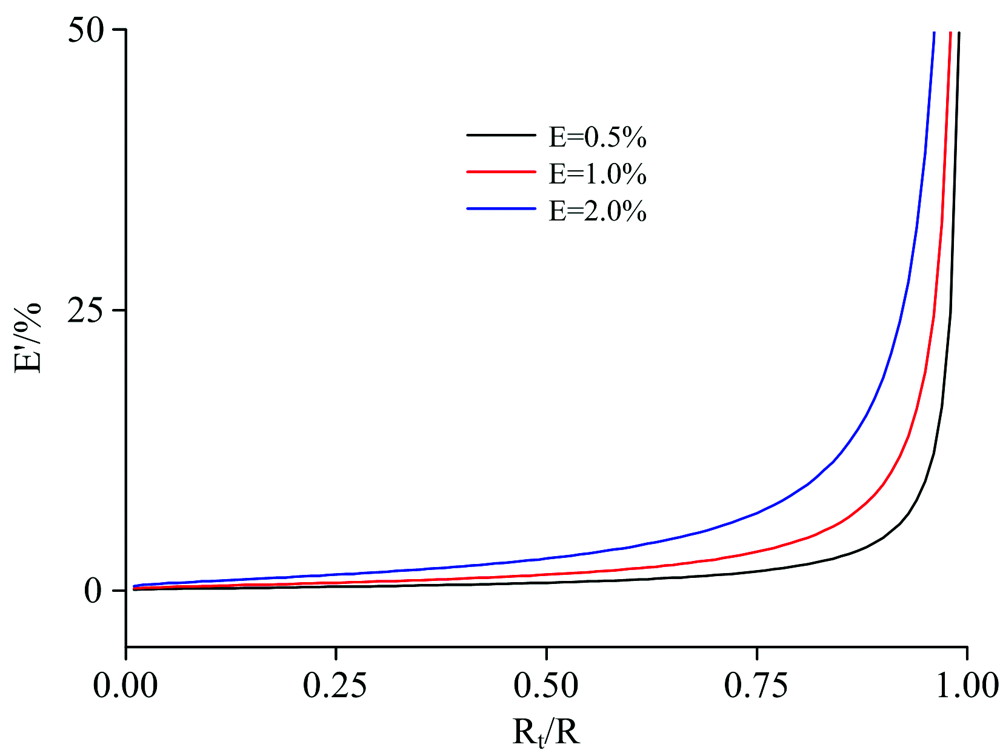 | 图2 E'与Rt/R的关系Fig.2 The relationship between E' and Rt/R |
由图2可见, 随着Rt/R的增加反演结果的相对误差逐渐增加, 当Rt/R趋于1时误差较大且随Rt/R的增加快速变大。 由于薄油膜对海水的拉曼散射光吸收较弱, 其对应的Rt/R趋近于1, 因此应用积分拉曼法反演薄油膜厚度时, 即使较小的误差同样会导致反演结果存在较大误差。
采用LIF技术探测溢油覆盖的海面, 探测器接收到波长λ 处的信号K包括油膜荧光信号、 海水背景荧光信号和海水拉曼散射光信号三部分, 该信号可以表示为[7]
式(7)中, P0为入射的激光能量, ke和kλ 分别为油膜在激发波长和波长λ 处的消光系数, d为油膜厚度, η , ξ 和Ψ 分别为在波长λ 处的油膜荧光转换效率、 海水荧光转换系数和海水拉曼转换系数, δ r为δ 函数。
采用LIF技术探测无溢油覆盖的海面, 此时探测器接收到的信号为海水的背景荧光和拉曼散射光信号, 由式(7)可得波长λ 处的信号Kw可表示为
油品的荧光特征光谱在波长λ 处的信号记为Ko, 由式(7)可得
由式(7)、 式(8)和式(9)可得利用荧光信号反演油膜厚度公式
式(10)可以消除积分拉曼法由于插值、 去除荧光等操作引入的计算误差, 但是该算法需要获取油品的荧光特征光谱Ko, 因此利用式(10)反演油膜厚度的关键是获取准确的油品荧光特征光谱Ko。
利用积分拉曼法获得的油膜厚度d, 由式(7)和式(9)推导可得Ko的计算公式为
由于积分拉曼法反演油膜厚度存在一定的误差, 因此利用式(11)计算获得的Ko与实际值也具有一定的差异, 可以通过迭代逼近的方法获取准确的Ko。 方法如下:
(1)利用积分拉曼法反演油膜厚度d。
(2)利用式(11)计算Ko。
(3)计算Ko加权平均值
(4)根据Ko与
本文采用梯度下降法逼近油品的荧光特征光谱, 具体实现方法如下:
设油品的荧光特征光谱信号强度y与油膜厚度x的关系为
代价函数定义为
由于积分拉曼法反演油膜厚度的误差与油膜厚度成反比, 因此在计算加权平均值时, 采用油膜厚度反演结果作为权重值, 使得较厚油膜具有较高的权重而较薄油膜的权重较小, 式中
梯度计算公式为
每次迭代后调整油膜厚度为
式(17)中: N为样本数量, α 为学习率。
关于阈值可根据反演精度要求进行设置, 一般可设置为
由式(13)可得
在荧光波峰波段, 油品的信号强度通常要远大于纯净海水的信号强度, 而薄油膜信号强度和纯净海水信号强度的差值较小, 可得
因此式(18)可近似为
设油膜荧光特征光谱的理论值为Ko, 利用该算法获取的近似值为
由式(20)、 式(21)和式(22)可得到
因此, 该算法反演油膜厚度的误差可近似为油膜荧光特征光谱的计算误差。
实验装置和材料包括: AvaSpec-ULS2048光谱仪、 NDV4542激光二极管、 手柄支架、 500 mL烧杯和移液器, 实验油品为原油与白油的混合油(1:10)和柴油。 实验过程如下:
(1)在烧杯中放置500 mL海水, 采集纯净海水的背景荧光和拉曼散射光信号。
(2)在烧杯中放置500 mL海水, 分别放置厚度为2, 5, 10和20 μm厚度的原油和柴油油膜, 静置30 min, 待其扩散均匀后, 采集不同厚度油膜的荧光光谱。
(3)在烧杯中放置足够厚油膜, 采集实验油品的荧光特征光谱。
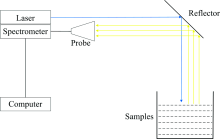
光谱仪与激光器平行放置, 激光器发射的激光经45° 反射镜改变激光束方向后, 照射到距离激光器5 m处放置的实验油品, 实验油品发射的荧光信号经反射镜改变方向后由光谱仪接收。 实验装置如图3所示。
 | 图3 实验装置图Fig.3 Experimental equipment structure |
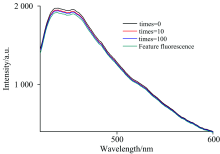
在采集过程中, 保持探头与样本距离不变, 采用Avasoft8软件采集光谱信号, 积分时间为200 ms, 采集波长范围为420~700 nm, 每个油膜样本采集50条光谱数据, 每条数据均采用多次采集的光谱信号平均值作为采集结果。 实验采集的部分光谱信号如图4所示。
 | 图4 实验采集光谱信号 (a): 海水的背景荧光和拉曼散射光信号; (b): 10 μm原油油膜荧光光谱信号; (c): 原油不同厚度油膜的荧光光谱信号; (d): 柴油不同厚度油膜的荧光光谱信号Fig.4 Spectral signals collected in the experiment (a): Background fluorescence and Raman scattering light spectra of sea water; (b): Fluorescence spectra of 10 μm oil film; (c): Fluorescence spectra of crude oil films with different thickness; (d): Fluorescence spectra of diesel oil films with different thickness |
由图4可见, 海水的拉曼峰在465 nm附近, 薄油膜的拉曼峰与海水的拉曼峰差异较小, 随着油膜厚度增加拉曼峰强度逐渐降低。 原油的荧光信号较弱, 柴油的荧光信号较强。 由于拉曼峰与荧光波段重合, 因此利用积分拉曼法反演油膜厚度时, 需要消除荧光的影响。
将采集数据的70%作为训练集, 30%作为测试集, 采用梯度下降法获取油品的荧光特征光谱, 以原油为例, 设置阈值参数为0.000 1
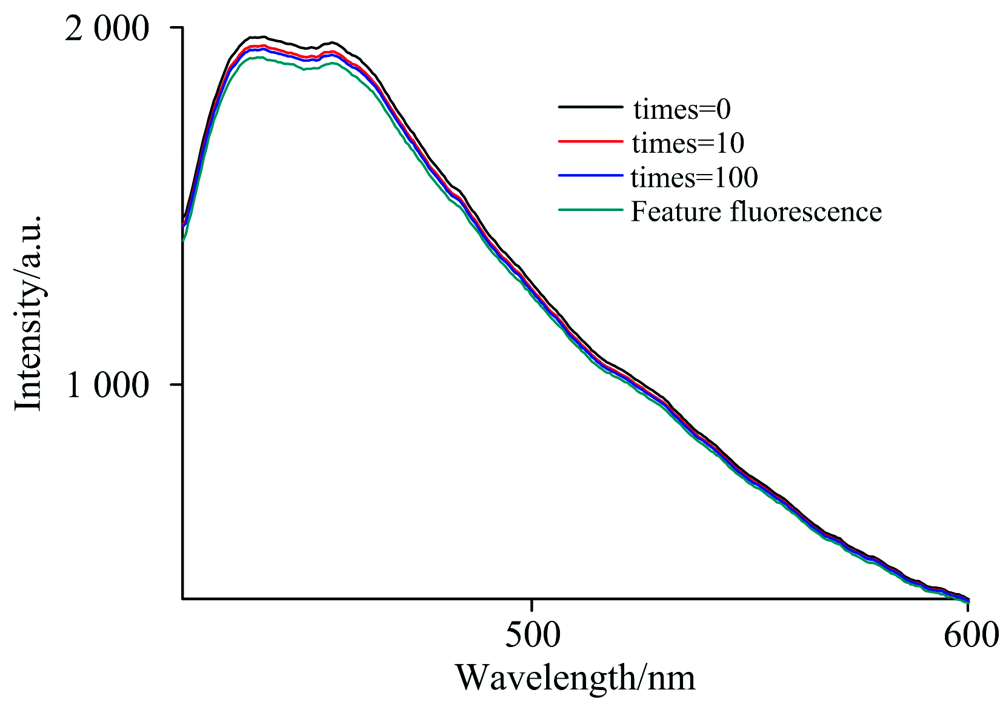 | 图5 不同迭代次数获取的荧光特征光谱Fig.5 Feature fluorescence spectrum with different iterations |
 | 图6 不同迭代次数Ko的误差值Fig.6 Error of Ko with different iterations |
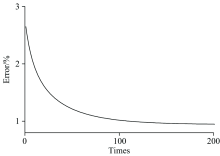
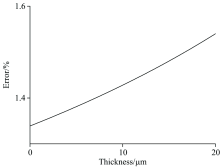
随着迭代次数的增加, 计算获取的荧光特征光谱与实验室获取的荧光特征光谱逐渐逼近, 迭代100次后, 在荧光波峰波段的误差在1%以内。 采用式(10)反演油膜厚度时, Ko引入的反演误差如图7所示。
利用获取的油品荧光特征光谱, 采用测试集数据反演油膜厚度, 结果如表1所示。
 | 图7 Ko引入的反演结果误差Fig.7 Error introduced by Ko |
| 表1 油膜厚度反演结果 Table 1 Inversion results of oil films |
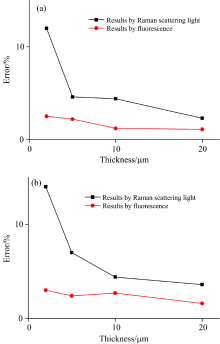
由表1可见, 积分拉曼法在油膜较薄时反演结果误差较大, 2 μm厚度的原油和柴油油膜反演误差分别为12%和14%, 随着油膜厚度的增加, 反演结果误差逐渐减小, 20μm厚度的原油和柴油油膜反演结果误差分别为2.3%和3.6%, 而本文算法对不同厚度油膜反演结果的误差没有较大差异, 对不同厚度油膜均能取得较好的反演结果。 本文算法反演结果的误差与积分拉曼法对比结果如图8所示。
 | 图8 不同厚度油膜反演结果误差 (a): 原油; (b): 柴油Fig.8 Errors of oil films with different thickness (a): Crude oil; (b): Diesel oil |
由图8可见, 采用本文算法可以有效提高油膜厚度反演结果的精度, 尤其是2 μm薄油膜效果最好, 原油和柴油2 μm油膜的反演结果误差分别由12%和14%降低为2.4%和3.0%, 其他厚度油膜反演结果的精度也有较大的提高, 各种厚度油膜的反演结果误差均小于3%, 具有较高的反演精度。
针对积分拉曼法反演海面溢油厚度误差较大的问题, 本文提出了一种融合拉曼散射光和荧光信号反演油膜厚度的算法, 首先利用积分拉曼法反演油膜厚度, 然后利用该反演结果采用梯度下降法获取溢油油品荧光特征光谱的近似值, 最后利用荧光信号反演油膜厚度。 文中推导了利用荧光信号反演油膜厚度的算法, 给出了油品荧光特征光谱的逼近算法, 并给出了利用荧光信号反演油膜厚度的误差分析。 以原油和柴油为实验油品, 对该算法进行了实验验证, 实验结果表明该算法能够有效提高薄油膜厚度的反演精度。 利用迭代获取的溢油荧光特征光谱, 该方法也可用于较厚油膜的厚度评估。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|