


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
结合纹理和空间特征的多光谱影像面向对象茶园提取
[黄邵东1  , 徐伟恒
, 徐伟恒1, 2, 3, * , 熊源1 , 吴超1 , 代飞1, 2, 3 , 徐海峰1 , 王雷光2, 3 , 寇卫利1 ]
, 徐伟恒, 熊源|
|


作者简介: 黄邵东, 1995年生, 西南林业大学大数据与智能工程学院硕士研究生 e-mail: hsd142636@swfu.edu.cn
云南茶园主要分布于山区, 往往与其他地物混合, 破碎化程度高, 给基于遥感的高精度茶园提取带来困难。 破碎化山地茶园的遥感识别能力有待进一步提高。 以西双版纳北部及普洱市南部山区为研究区, 以高分一号(GF-1)遥感影像为数据源, 基于易康(eCognition9.0)软件, 采用多尺度分割(MRS)方法对影像进行分割, 并通过ED3Modified评估影像的最优分割尺度。 首先构造了包括14个光谱特征、 6个纹理特征和3个空间特征的23维初始特征, 通过计算样本的分离度对分类特征空间进行优化, 确定了16维最优特征空间。 然后应用面向对象的监督分类方法[贝叶斯(Bayes)、 决策树5.0(DT5.0)及随机森林(RF)]对研究区茶园进行提取。 采用实地调查样点和随机点结合的方法对提取结果进行精度验证, 并比较了不同分类方法的茶园提取精度。 面向对象的监督分类[多分类(茶园、 森林、 农田、 不透水层、 水体)]结果的总体精度(OA)和Kappa系数分别为(Bayes: 87.73%, 0.70), (DT: 88.52%, 0.72), (RF: 91.23%, 0.78)。 三种分类方法对茶园提取的生产者精度(PA)和使用者精度(UA)分别为(Bayes: 67.23%, 75.33%), (DT: 68.84%, 83.83%), (RF: 70.54%, 87.13%); 相比于面向对象的RF多分类, 面向对象RF二分类(茶园、 其他地物)OA和Kappa系数分别提高了3.24%和0.07, 茶园提取的PA与UA分别提高了5.99%和5.61%; 相较于仅利用光谱特征的基于像元的RF多分类, 面向对象的RF二分类OA与Kappa系数分别提高了23.32%和0.27, 茶园提取PA与UA分别提高了21.10%和29.03%。 结果表明: 采用面向对象的监督分类方法在对茶园提取方面有应用潜力, 尤其面向对象的RF分类精度更高, 二分类相较于多分类对于茶园提取更为精细和准确。 该方法对于复杂、 破碎山地茶园提取精度较高, 能够满足基于高空间分辨率多光谱影像的茶园精细化识别应用需求。
, XU Wei-heng, XIONG YuanThe tea plantations of Yunnan province are mainly fragmentally distributed in mountainous areas and often mixed with other ground objects, making it difficult to extract tea plantations with high precision based on remote sensing. Combining textures and spatial features based on Object-Oriented method is rarely applied to extract tea plantations in previous crop classification research using multi-spectral imagery. Therefore, it is necessary to explore further the recognition ability for tea plantations by using high spatial resolution and multi-spectral images under the fragmental and mountainous region. In this research, a typical mountainous area located between the northern Xishuangbanna autonomous prefecture and the southern of Pu’er city was used as our study area. A scene image with a 2 m resolution pan-chromatic and 8 m resolution multi-spectral derived from the GF-1 PMS sensor was used as the source data for our research. The eCognition Developer9.0 software was employed to segment the image by multi-resolution segmentation, and the ED3Modified method was used to evaluate the optimal segmentation scale. Firstly, we constructed 23 dimensions of original features including 14 spectral features, 6 textures and 3 spatial features. Secondly, 16 optimal features were selected to classify by calculating the separation distance of five land-cover types. Thirdly, based on 16 optimal features space, three object-oriented supervised classification methods (Bayes, Decision Tree 5.0 (DT) and Random Forest (RF) were applied to extract the tea plantations of the study area. Finally, filed survey samples and random samples were used to validate the accuracy of tea plantations extraction results, and we compared the classification accuracies of different classification methods. The results showed that for the multi-classification (including tea plantations, forest, cropland, impervious and water body) the overall accuracy (OA)/ Kappa coefficient (Kappa) are Bayes (87.73%/0.70), DT5.0 (91.23%/0.78) and RF (88.52%/0.72) respectively, but for tea plantations, the producer accuracy (PA)/user accuracy (UA) are Bayes (67.23%/75.33%), DT (68.84%/83.83%) and RF (70.54%/87.13%). Compared with the object-oriented RF multi-classification, the OA and Kappa of the object-oriented RF binary classification (tea plantations and others) increased by 3.24% and 0.07, the PA/UA of tea plantations increased by 5.99%/5.61%. Similarly, compared with the pixel-based multi-classification, the OA and Kappa of the object-oriented RF binary classification increased by 23.32% and 0.27, the PA/UA of tea plantations increased by 21.10%/29.03%, respectively. The results indicated that the object-oriented supervised classification methods have the potential for tea plantations extraction, especially the object-oriented RF classification got a higher accuracy. Moreover, the binary classification method has higher accuracy than that of multi-classification for tea plantation extraction. Our object-oriented method that combined textures and spatial features with spectral features is effective for tea plantations extraction, especially when applied to the complex and fragmental mountainous landscape. Our method can meet the application requirements in fine tea plantations identification based on high-spatial resolution and multi-spectral imagery too.
数据来源: 自然资源部国土卫星遥感应用中心, 自然资源卫星影像云服务平台
茶叶起源于中国, 中国是最早发现和种植茶叶的国家, 中国茶文化源远流长[1]。 茶叶是包括中国、 斯里兰卡, 肯尼亚和印度在内等诸多发展中国家重要的经济支柱[2]。 21世纪初以来, 全球茶产业发展迅速, 茶叶种植面积与产量都有了显著的增长。 截止2018年, 中国茶叶种植面积为2 985.80千公顷, 产量达261.04万吨。 而云南省作为我国重要的产茶大省, 茶叶成为当地农民的主要经济来源以及当地财政税收的重要来源。 2018年云南省茶叶种植面积达46.66万公顷, 茶叶产量达42.33万吨, 同比2017年增长7.6%。 茶园快速扩张, 提高了茶叶产量, 进而推动了当地的经济发展, 但同时产生了森林资源减少、 生物多样性及生态系统服务降低等一系列负面影响[3]。 因此准确识别茶园分布范围, 对有关部门制定相应的土地政策, 合理种植茶园、 茶园病害预防及茶叶估产、 保护生态环境等具有科学的指导意义。
传统的应用遥感影像对地物进行提取大多是基于像元的方法, 无法充分利用高空间分辨率影像丰富的地物信息(纹理、 空间信息), 且会造成信息冗余, 容易导致地物错分、 漏分, 且出现“ 椒盐现象” [4]。 而面向对象分类方法则是基于地物类内一定同质性进行对象分割获得基元, 因此可以充分利用高空间分辨率影像丰富的光谱信息、 纹理信息、 上下文语义信息、 邻域信息和空间信息等相关信息, 弥补了传统基于像元分类容易造成的地物分类破碎化的弊端[5]。 以云南省重点山地茶园区域的一景GF-1 PMS影像为数据源, 采用多尺度分割(multiresolution segmentation, MRS)方法对影像进行分割, 采用面向对象的监督分类方法[贝叶斯(Bayes)、 决策树(decision tree, DT)、 随机森林(random forest, RF)]实现茶园的提取, 探索适合山区茶园提取最优的分割参数和分类特征组合的高精度、 精细化提取方法。
研究区位于云南省南部, 是典型的山地茶园分布区域。 世界纪录认证机构(World Record Certification Agency, WRCA)认证的“ 世界最大连片茶园” 的大渡岗万亩茶园位于本文研究区内。 地理范围(100° 43'34″E— 101° 29'39″E, 22° 02'30″N— 22° 45'11″N), 面积约为4 412 km2, 如图1所示。 研究区内地物类型主要有森林、 茶园、 农田、 不透水层以及水体等。
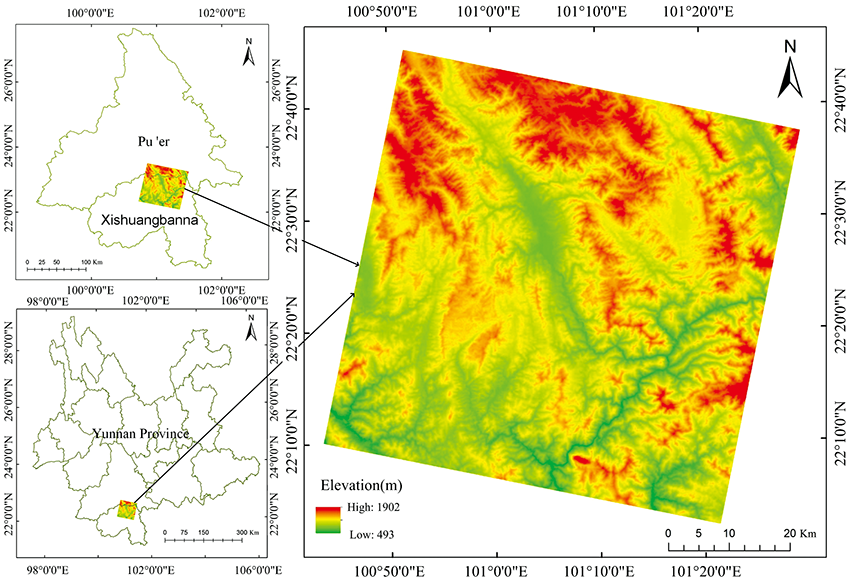 | 图1 研究区示意图Fig.1 Schematic diagram of study area |
基于eCognition9.0软件, 采用MRS方法对影像进行不同尺度分割, 并利用ED3Modified对分割结果进行评估, 确定茶园提取的最优分割尺度。 在研究区分割对象上随机选取了茶园、 农田、 森林、 水体及不透水层5种地物类型共600个分割对象用作训练样本, 并结合2018年12月份对普洱、 西双版纳地区茶园的实地调查及Google Earth影像数据对训练样本进行核对校正。 通过优化特征空间组合后, 分别利用Bayes, DT及RF分类方法对茶园进行提取并对茶园提取结果进行精度比较。
以一景GF-1 PMS遥感影像(拍摄日期: 2019年2月21日)为数据源, 包括2m分辨率的全色波段, 4个8 m分辨率的多光谱波段[蓝(Blue)、 绿(Green)、 红(Red)、 近红外(NIR)]。 利用ENVI5.3进行影像预处理, 采用NNDiffuse PAN Sharpening算法进行全色与多光谱数据融合, 最终获得2 m分辨率的融合影像。
GF-1影像分割效果主要受输入影像波段, 形状, 紧致度及尺度4个因素影响[6]。 若分割尺度不当, 则会导致一些地物存在“ 欠分割” 或“ 过分割” 现象, 难以保证分类精度。 为克服不当尺度造成的上述弊端, 采用MRS方法对影像进行分割并进行最优分割尺度评估, 借助ED3Modified方法及样地叠加进行目视解译确定影像的最优分割尺度[6]。 该方法的原理是当与一个参考多边形的重叠面积超过参考多边形或被分割对象面积的50%时, 被分割的对象才能被标记为相对应的参考多边形的分割对象。 ED3Modified值为0~1的归一化指数, 计算见式(1)。 ED3Modified值越低则表示影像分割质量越高。 在分割对象中随机选取茶园、 森林、 农田、 不透水层、 水体样地各30个参考多边形, 采用ArcGIS10.5计算ED3Modified值, 最佳分割尺度由ED3Modified的最低值决定。
$\begin{array}{l}\text { ED } 3_{\text {Modified }}= \\\frac{1}{I} \sum_{i=1}^{I} \Bigg| \frac{1}{J_{i}} \sqrt{\frac{\left(1-\frac{S\left(r_{i} \cap s_{j}\right)}{r_{i}}\right)^{2}+\left(1-\frac{S\left(r_{i} \cap s_{j}\right)}{s_{i}}\right)^{2}}{2}} \Bigg| \end{array}$(1)
式(1)中, ri为参考多边形; I为参考多边形的数量; S为面积; sj为对应的参考多边形的分割对象; Ji为相对应的分割数。
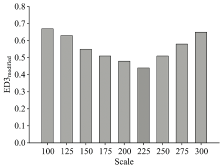
选择分割尺度范围为100~300(分割步长为25)对影像进行分割。 如图2所示, ED3Modified值呈现为“ 中间低两头高” 的趋势, 说明ED3Modified表现为先减少后增加的变化, 即在分割尺度为225时ED3Modified最小(0.44), 则与之对应的尺度225为最优分割尺度。
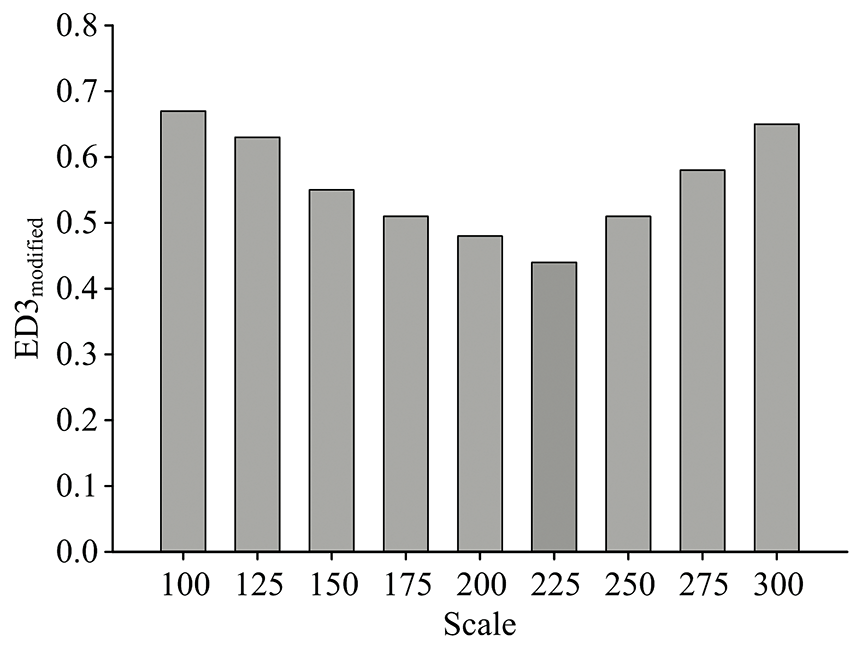 | 图2 ED3Modified值随分割尺度的变化Fig.2 The ED3Modified values vs the segmentation scale |
不同分割尺度的分割效果如图3所示。 分割尺度过小, 会导致过分割, 如图3(a— e)所示, 大面积连片区域的地物分割过于细碎化(森林、 茶园); 分割尺度过大, 导致欠分割, 一些夹杂在大面积地物内的其他零散地物就会被合并为大面积地物, 造成地物分割对象混淆, 如图3(g— i)所示。 在最佳分割尺度下, 地物分割不仅对离散的不透水层、 水体以及连片的茶园、 森林都达到了较为良好分割效果, 合并了同类地物小区域, 又与其他地物有明确的边界, 如图3(f)所示。 因此, 针对本研究区域, 当分割尺度为225时, 不论是小面积的不透水层, 水体, 或者是大面积连片的森林、 茶园、 农田都能较好的与参考图斑重合, 获得良好的分割效果。
 | 图3 不同尺度下的影像分割结果Fig.3 Image segmentation results at different scales |
分类过程采用分割对象的纹理、 光谱及空间特征, 见表1。 选取了GF-1影像的4个波段(Blue, Green, Red和NIR)的光谱反射率均值及标准差、 调整土壤亮度的植被指数(soil adjust vegetation index, SAVI)、 归一化植被指数(normalized difference vegetation index, NDVI)、 燃烧面积指数(burned area index, BAI)及归一化水体指数(normalized difference water index, NDWI), 亮度指数(brightness)均值和对象内部最大差值(Max.diff)等14个光谱特征; 基于灰度共生矩阵(gray level co-occurrence matrix, GLCM) 的角二矩阵(angular second moment)、 相异度(dissimilarity)、 相关性(correlation)、 熵(entropy)、 及同质性(homogeneity)和对比度(contrast)等6个纹理特征; 紧致度(compactness)、 面积(area)及长宽比(length/width)等3个空间特征。 最终构建了23维分类特征。
| 表1 面向对象分类的对象特征 Table 1 The features of object-oriented classification |
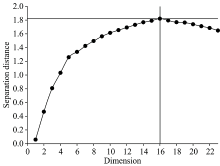
将表1中的23维特征组合为一个特征空间, 基于eCognition9.0计算5类样本在此特征空间中的分离度, 通过比较不同特征空间产生的分离度, 找出在两两不同地类样本之间产生最大的平均最小距离的特征组合, 各地物在此特征空间下具有最好的可分性, 则此特征空间为最优特征组合。 如图4所示, 当特征维度达到16维时, 地物可分离度已达到1.82, 再增加特征对于地物样本之间的可分离效果趋势逐渐下降, 也即增加特征已经造成了分类特征冗余, 因此将最优特征空间定为16维, 分别为BAI, Homogeneity, Area, NIR_Mean, NIR_Std, Length/Width, Dissimilarity, Compactness, Red_Mean, Max.diff, Entropy, Blue_Mean, NDVI, Correlation, Brightness以及SAVI。
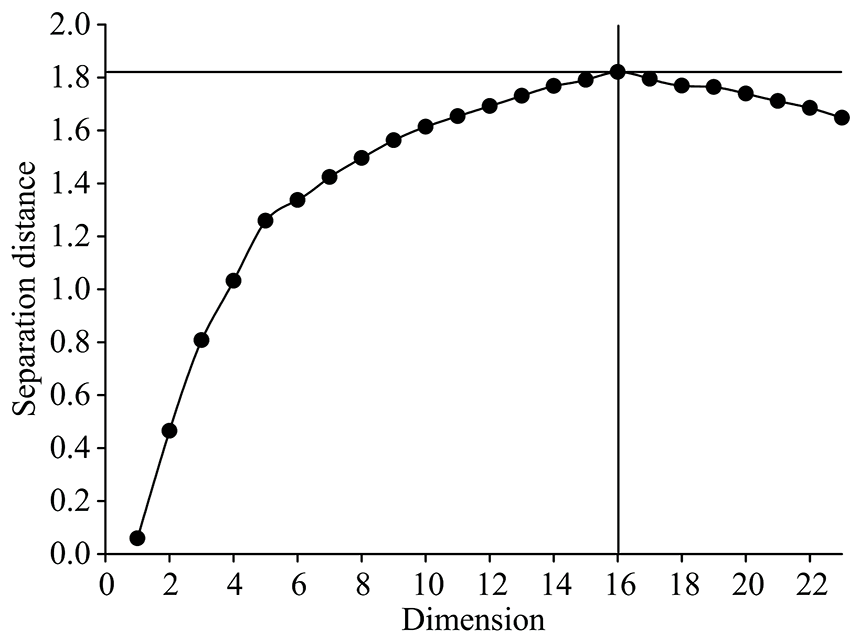 | 图4 最优特征空间维度评价Fig.4 Evaluation of the optimal feature spaces dimensions |
基于特征优化得到16维分类特征, 选用常用的三种监督分类方法(Bayes, DT, RF)进行茶园提取并进行精度对比。 对比了(1)三种面向对象的监督分类[多分类(森林、 茶园、 农田、 不透水层及水体)]精度; (2)面向对象的RF二分类(茶园、 其他)与面向对象的RF多分类茶园提取精度; (3)面向对象RF二分类与基于像元的RF多分类的茶园提取精度。
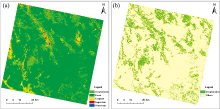
面向对象的RF的多分类[图5(a)]以及RF二分类的茶园提取结果[图5(b)]。 多分类结果与茶园混淆的作物主要为农田, 而二分类由于将森林、 不透水层、 农田及水体归为一类, 增加了与茶园的类间差异, 因此, 二分类较多分类对于农田的过滤效果较明显。
 | 图5 随机森林(RF)茶园提取结果Fig.5 Extraction results of random forest tea plantations |
选取研究区茶园分布较为典型的大渡岗茶园 (100° 57'16.62″E, 22° 21'3.12″N)进行局部地区茶园提取效果展示及面积比较。 图6(a)为大渡岗影像真彩色合成图(蓝、 绿、 红波段合成); 图6(b)为面向对象的RF多分类结果; 图6(c)为基于像元的RF多分类结果。 大渡岗连片茶园的官方统计面积为65 246亩, 面向对象多分类对于茶园的提取面积为59 851亩, 与统计面积相对误差为-8.27%; 基于像元多分类对于茶园的提取面积为55 142亩, 与统计面积相对误差为-15.49%。
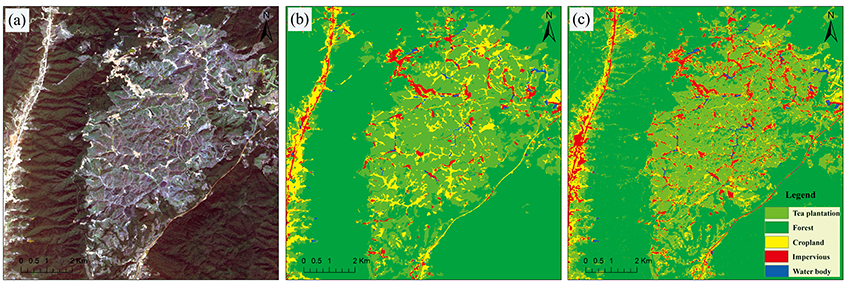 | 图6 面向对象与基于像元的RF分类结果对比Fig.6 Comparison of the object-oriented and pixel-based classifications |
本研究采用ArcGIS10.5在GF-1号影像上生成3 000个随机点结合Google Earth进行地物类型标记, 然后与野外实地调查的1 006个数据点相结合, 利用ENVI5.3生成分类混淆矩阵进行精度验证, 其中验证点个数分别为茶园(603)、 森林(2 728)、 农田(372)、 不透水层(188)及水体(115)。
由表2可知, 对于本研究区中5类地物分类中, 面向对象的Bayes, DT及RF分类的总体精度(overall accuracy, OA)与Kappa系数分别为87.73%, 0.70; 88.52%, 0.72; 91.23%, 0.78。 对于茶园提取效果而言, DT与RF分类效果优于Bayes, 以RF分类效果更为显著, 生产者精度(producer accuracy, PA)与使用者精度(user accuracy, UA)分别达到了70.54%及87.13%。
| 表2 面向对象的监督分类结果精度对比 Table 2 Comparison of the accuracies of object-oriented supervision classification |
由表3可知, 基于像元的RF分类的OA与Kappa系数分别为71.42%与0.58, 而茶园的PA与UA只达到了55.43%和63.71%, 由图6大渡岗茶园提取结果可知, 基于像元的RF的茶园提取结果[图6(c)]相较于面向对象分类的茶园提取结果[图6(b)]“ 椒盐” 现象比较严重, 且茶园、 农田以及森林混淆度较高, 分类结果较为破碎。 而面向对象RF二分类的OA与Kappa系数较基于像元RF分类的结果分别提高23.32%和0.27, 较面向对象RF多分类OA与Kappa系数分别提高3.24%和0.07; 就茶园提取精度而言, 面向对象RF二分类PA与UA比基于像元的RF多分类分别提高了21.10%和29.03%, 比面向对象的RF多分类分别提高了5.99%和5.61%。
| 表3 基于像元和面向对象的RF茶园提取精度对比 Table 3 Comparison of the accuracies of pixel-wise RF and object-oriented RF for tea plantations extraction |
仅利用单一时相多光谱GF1-PMS影像, 基于像元的RF分类方法, 在山区茶园提取中精度(PA/UA: 55.43%/63.71%)不高。 然而, 结合纹理和空间特征, 采用面向对象方法可以提高茶园提取精度。 在三种分类器(RF, Bayes和DT)中, 面向对象的RF分类精度(PA/UA: 70.54%/87.13%)较高。 面向对象RF二分类方法的茶园提取精度(PA/UA: 76.53%/92.74%)高于面向对象RF多分类方法。 本研究利用单一时相GF-1全色影像融合多光谱对于山区茶园提取获得了较为满意的精度, 说明高分影像对山区破碎茶园的监测及制图具有较好的应用价值及潜力。
随着传感器数量的增加, 遥感影像的空间分辨率、 光谱分辨率以及时间分辨率的提高, 在充分利用光谱信息的同时, 空间信息及纹理信息对于地物分类越来越重要[7]。 山区地物类型复杂多样(橡胶、 香蕉、 甘蔗、 灌草等)与茶园具有相似的光谱特征, “ 异物同谱” 现象增加了高精度提取茶园的难度, 而采用面向对象的分类方法, 相比于基于像元的分类, 在光谱特征基础上增加了纹理特征与空间特征, 提高了茶园的提取精度; 将森林、 水体、 农田及不透水层四类地物合并为一类, 平均了四种地物的类间差异, 而增大了茶园同森林、 农田的类间差异, 因此面向对象的DT二分类较多分类进一步提高了茶园的提取精度。 但面向对象分类方法高精度提取茶园依赖于影像的高空间分辨率, 而诸如高分、 WorldView及SPOT等系列影像获取成本高。 本文仅讨论了单一时相条件下, 融合纹理和空间特征的茶园提取方法。 如何将多源、 多时相遥感影像融合, 应用于山区复杂地形条件下茶园提取和精细化制图, 有待进一步研究。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|