




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于无人机可见光谱遥感的玉米长势监测
[王翔宇1  , 杨菡
, 杨菡2 , 李鑫星2 , 郑永军3 , 严海军4 , 李娜5, * ]
, 杨菡]
|
|


作者简介: 王翔宇, 1989年生, 长治学院电子信息与物理系讲师 e-mail: wangxiangyu8@126.com
玉米是我国重要的粮食作物之一, 在我国种植规模最大、 发展最快。 玉米的长势会直接影响到其产量和品质, 因此通过对玉米的长势进行有效监测, 可以为田间管理、 早期产量估算提供宏观的参考信息, 为国家和相关部门决策提供重要的参考依据。 以无人机为遥感平台, 搭载影像传感器构建遥感系统, 获取玉米可见光谱遥感影像。 利用ENVI软件对获取的玉米冠层可见光谱彩色图像进行几何校正和辐射校正, 然后对图像进行彩色图像灰度化和增强处理。 利用对农田复杂背景适应能力较好以及具有较强光照适应性的AP-HI算法完成作物分割来提取玉米覆盖度信息。 在计算玉米覆盖度时, 首先利用AP-HI算法将图像进行分割, 并转换为二值图, 来去除图像中的土地、 水管、 道路、 作物残渣等背景, 以保留玉米的二值图像。 图像中的农田存在道路区域, 计算实际作物覆盖度时需将其排除。 道路区域出现在图像的四个边界以及相对正中的位置处, 对这些位置分别进行处理, 统计其中黑色像素点的个数, 根据像素点个数确定道路宽度, 并将道路部分从二值图中去除。 去除后的二值图中, 白色像素为无作物区域, 黑色像素为玉米种植区域, 统计黑色像素占总像素的比例, 以此确定作物的多少。 选取80×80像素值作为单位面积, 对处理图像进行分块标记, 得到区块数为720, 对单位面积的分块进行全区域扫描, 每当扫描到一个黑色像素值就将总的统计面积加1, 直至扫描到6 400个像素点, 计算其中含有的总的黑色像素值数目与6 400的比值, 直至将720个区块黑色像素点占总像素比例统计完全, 即可计算图像中黑色像素数与总像素数之比, 即为玉米覆盖度。 在此基础上, 根据实际情况计算玉米冠层孔隙率, 并建立覆盖度与叶面积指数模型, 完成玉米叶面积指数反演, 为玉米长势监测提供理论依据。
Maize is one of the most important food crops in China, which has the largest planting scale and the fastest growing trend. The growth of maize will directly affect its yield and quality. Therefore, through effective monitoring of the growth of maize can provide macro information for field management and yield estimation, and provide an important basis for decision-making by the relevant national departments. In this study, Unmanned Aerial Vehicle (UAV) equipped with an image sensor was used as a low-altitude remote sensing platform to obtain visible spectral remote sensing images of maize. First we made geometric and radiometric correction of maize canopy visible spectrum image by ENVI software, and then we made gray and enhancement processing of the color image. AP-HI algorithm was used to obtain the maize coverage information, for it has strong light adaptability to the complex background of farmland. The image was segmented by AP-HI algorithm and converted it into a binary image to remove the background of the land, water pipes, roads and residues in the image, so as to retain the binary image of maize. The road existed in the farmland of the image, which needed to be excluded when calculating the actual crop coverage. The road area appeared in the four boundaries and center of the image. The number of black pixels in the road area was counted and the road width was calculated according to the number of pixels, and then the road part was removed from the binary image. In the processed image, the white pixels are the non-crop area, and the black pixels are the maize planting area. In order to calculate the size of maize crops, the proportion of black pixels to total pixels in the binary image needed to be counted. The unit area was selected as 80×80 pixels, and the image was marked by blocks from top to bottom and left to right and got the number of blocks was 720. The unit area was scanned, and the proportion of the black pixels per unit area to the total number of pixels (6 400 pixels) was calculated. Until the 720 blocks were completely counted, the proportion of the number of black pixels to total pixels in the image could be calculated, which is the maize coverage. The relational model between coverage and Leaf Area Index (LAI) through canopy porosity was established to complete maize LAI inversion, so as to provide theoretical basis for monitoring maize growth. The results show that low altitude UAV visible spectrum remote sensing can be used as an effective method to extract crop coverage, which has a good prospect.
玉米是我国规模最大、 发展最快的粮食作物。 2018年粮食作物中, 玉米播种面积最大, 共计4 212.9万hm2, 占比36.0%[1]。 玉米长势会直接影响到其产量和品质, 有效地监测玉米长势可以为田间管理、 早期产量估算提供宏观的信息, 为国家和相关部门决策提供重要的参考依据。 因此玉米长势监测研究具有重要的现实意义。
叶面积指数(leaf area index, LAI)常作为评价作物长势和预测产量的依据[2, 3, 4]。 传统的LAI测量方法效率低且精度不高, 而使用光学仪器测量可以达到无损测量的目的, 测量结果准确, 但需要对采集图像进行后期处理, 较为费时。 王宏博等利用玉米冠层高光谱数据, 结合线性回归算法, 对春玉米叶面积指数进行了反演。 王传宇等通过分析玉米冠层顶视单角度红外图像, 完成了玉米叶面积指数的获取[5]。 遥感技术的出现, 为作物长势监测提供了新的途径, 植被指数被广泛应用在遥感领域, 用于评价植被覆盖和长势。 Ishfaq Ahmad等利用机器学习算法对农场玉米的卫星遥感图像进行处理, 计算出了玉米植被指数[6]。 卫星影像为作物长势监测提供了数据支撑, 但卫星影像受天气影响大, 且分辨率难以满足作物覆盖度变化研究需求[7]。 低空无人机遥感可以弥补卫星影像的不足, 为作物长势监测提供了一种高时效、 低成本的新方法。 张宏鸣等利用无人机多光谱影像, 完成了对夏玉米的叶面积指数反演[8]。 陈鹏飞等利用无人机获取玉米生育期的高光谱图像, 建立了玉米叶面积指数反演模型[9]。 Eija Honkavaara等利用轻型无人机搭载FPI光谱相机, 对采集到的光谱立体图像进行处理和评估[10]。 Blancon Justin等利用无人机获取玉米的多光谱图像, 并利用高通量模型辅助方法对玉米的叶面积指数的动态变化进行了监测分析[11]。
作物覆盖度和叶面积指数密切相关, 是描述地表植被分布的重要参数, 可以通过获取作物覆盖度来构建叶面积指数反演模型, 完成作物长势分析。 本研究主要以无人机为遥感平台, 通过搭载高精度数码相机来完成玉米种植区域的图像获取, 通过图像处理来获取玉米覆盖度信息, 并构建玉米叶面积指数反演模型, 实现对玉米长势的监测, 为玉米的田间管理和早期产量估算提供依据。
试验在河北省涿州东城坊镇的“ 中国农业大学涿州实验站” (115.857° E, 39.471° N)选择保护性耕作地块开展, 种植作物为夏玉米。 试验时间为2017年5月18日12:00— 13:00, 天气晴, 太阳辐射强度稳定, 东北风≤ 3级(约5 m· s-1), 微风, 适于无人机航拍。
采用四旋翼电动无人机Phantom 3 professional作为遥感平台, 无人机飞行设定高度约为5~50 m, 多次无人机遥感试验均采用同一套航线, 相机镜头选择Phantom 3 professional标配镜头, 进行垂直拍摄。
1.2.1 可见光谱遥感图像预处理
利用无人机遥感获取玉米冠层可见光谱彩色图像, 图像分辨率4 000× 3 000, 水平、 垂直分辨率72 dpi, 24位深彩色图像。 利用ENVI软件进行几何校正和辐射校正等预处理。 由于选取阈值需要参照直方图, 因此在图像进行处理后, 再获取图像的直方图以选取阈值。
1.2.2 玉米覆盖度提取
由于光照条件和复杂的环境对于作物图像获取具有较大影响[12], 因此采用AP-HI作物自动提取算法完成玉米覆盖度提取[13]。 AP-HI算法具有较强的光照适应性, 能在复杂的环境下准确提取作物的覆盖度。
AP-HI算法结合了色度-亮度查找表(hue intensity-look up table, HI-LUT)[14]以及仿射传播聚类方法(affinity propagation, AP)[15], 利用较少的训练样本即可获得较好的作物分割效果。 当叶片出现高光时, 该方法性能下降, 但由于发生高光的叶片面积占整幅图像面积比例很小, 因此对研究结果影响较小[16]。 AP-HI算法概率密度函数为
式(1)中, h为色度的随机变量, θ =(μ , σ 2|I)为某一特定亮度I下的未知分布参数, μ 为期望, σ 2为方差。
利用最大似然法估计分布参数θ =(μ , σ 2|I), 其中使用的样本数据来自户外不同光照条件下的作物图像。 利用估计出特定亮度I下绿色色度的均值μ 和方差σ 2, 组成最终亮度范围在[1, 250]下的色度-亮度查找表(HI-LUT), 其中μ 为对应亮度下的期望色度。
根据得到的颜色模型, 定义测度|Ψ (i, j)|来表征给定的像素点pixel(i, j)的色度与期望色度之间的距离。 距离越大时, 该像素点属于绿色作物的可能性就越小。
式(2)中, H(i, j)和I(i, j)分别表示像素点pixel(i, j)的色度值和亮度值, μ I(i, j)和σ I(i, j)分别表示I(i, j)在HI-LUT中对应的均值μ 和标准差σ 。 按照式(3)设定Ψ (i, j)的阈值k来对图像进行分割。 当Ψ (i, j)小于或等于阈值k时, 像素点为作物, 否则为背景。
由于分割结果对测度中的阈值选择较敏感, 故利用仿射传播聚类算法对其进行改进, 以类别代替单个像素点进行分割, 从而降低了阈值选择带来的影响, 同时一定程度上提升了分割的效果, 提取结果更为稳定。
1.2.3 玉米叶面积指数反演模型
根据实际情况选择合适的算法并计算各生育期作物冠层孔隙率, 与同时期实测的叶面积指数作回归分析, 分别建立叶面积指数反演模型。 叶面积指数与植被覆盖度的关系如式(4)
将式(4)进行转化, 得到
其中, k为冠层消光系数, λ 0> 1代表规则分布, λ 0=1代表随机分布, λ 0< 1代表丛生分布。 可见, 叶面积指数LAI与冠层孔隙率(1-Cc)为对数函数关系。
获取不同覆盖度玉米冠层可见光谱彩色图像, 利用AP-HI算法去除土地、 水管、 道路、 作物残渣等背景, 保留玉米图像。 在近景拍摄条件下, AP-HI算法能够准确分割玉米图像, 分割结果如图1所示。
 | 图1 近景条件下的玉米图像分割 (a): 原图; (b): 分割后图像Fig.1 Corn image segmentation (close shot) (a): Original image; (b): Image after segmentation |
由图1(b)可以看出, 在近景条件下, 利用AP-HI算法可以有效去除图像中的土地、 作物残渣等背景, 特别是土地中的黑色水管有反光现象, 利用AP-HI算法可以有效去除水管, 同时避免光照对图像的影响。
在远景拍摄条件下, 利用AP-HI算法对玉米图像分割, 分割结果如图2所示。
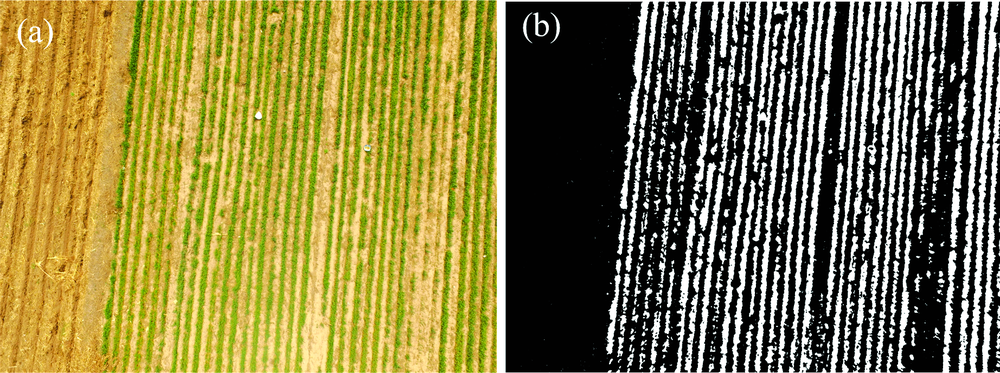 | 图2 远景条件下的玉米图像分割 (a): 原图; (b): 分割后图像Fig.2 Corn image segmentation (distant shot) (a): Original image; (b): Image after segmentation |
由图2(b)可以看出, 在远景条件下, 利用AP-HI算法同样可以有效去除图像中的土地、 作物残渣等背景, 并保留玉米图像。
综上, 无论是近景航拍还是远景航拍, AP-HI算法均能有效去除图像背景, 并有效保留玉米图像为后续研究提供基础。
2.2.1 道路提取
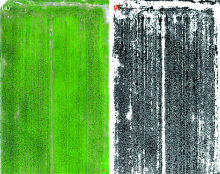
计算玉米覆盖度需选取视野范围较大的图像, 由于近景航拍图像所获得的玉米作物视野范围较小, 因此选取视野范围更大的远景航拍图像作为处理对象。 在无人机远景航拍的图像中, 选出整块玉米田地的区域, 作为新的待处理图像, 该图像的分辨率为1722× 2970, 利用AP-HI算法将图像进行分割, 并转换为二值图, 如图3所示。
 | 图3 玉米地块图像分割 (a): 玉米地块原图; (b): 分割后图像Fig.3 Image segmentation of cornfield (a): Original image; (b): Image after segmentation |
图3(b)中白色代表无作物区域, 黑色代表玉米种植区域。 由原始图像观察可知在农田中存在道路区域, 在计算实际作物覆盖度时需将其排除。 道路区域出现在图像的四个边界以及相对正中的位置处, 且道路的区域一般不会超过200个像素值大小, 因此将上下各200行、 左右各200列以及图像正中间的0.2n(n代表图像的列数)列的图像单独取出进行处理, 统计其中黑色像素点的个数, 如图4— 图6所示。
 | 图4 上下200行黑色像素点统计 (a): 起始200行像素统计; (b): 末尾200行像素统计Fig.4 Black pixel statistics (up and down 200 rows) (a): The pixel statistics in first 200 rows; (b): The pixel statistics in last 200 rows |
 | 图5 左右200列黑色像素点统计 (a): 起始200列像素统计; (b): 末尾200列像素统计Fig.5 Blackpixel statistics (left and right 200 columns) (a): The pixel statistics in first 200 columns; (b): The pixel statistics in last 200 columns |
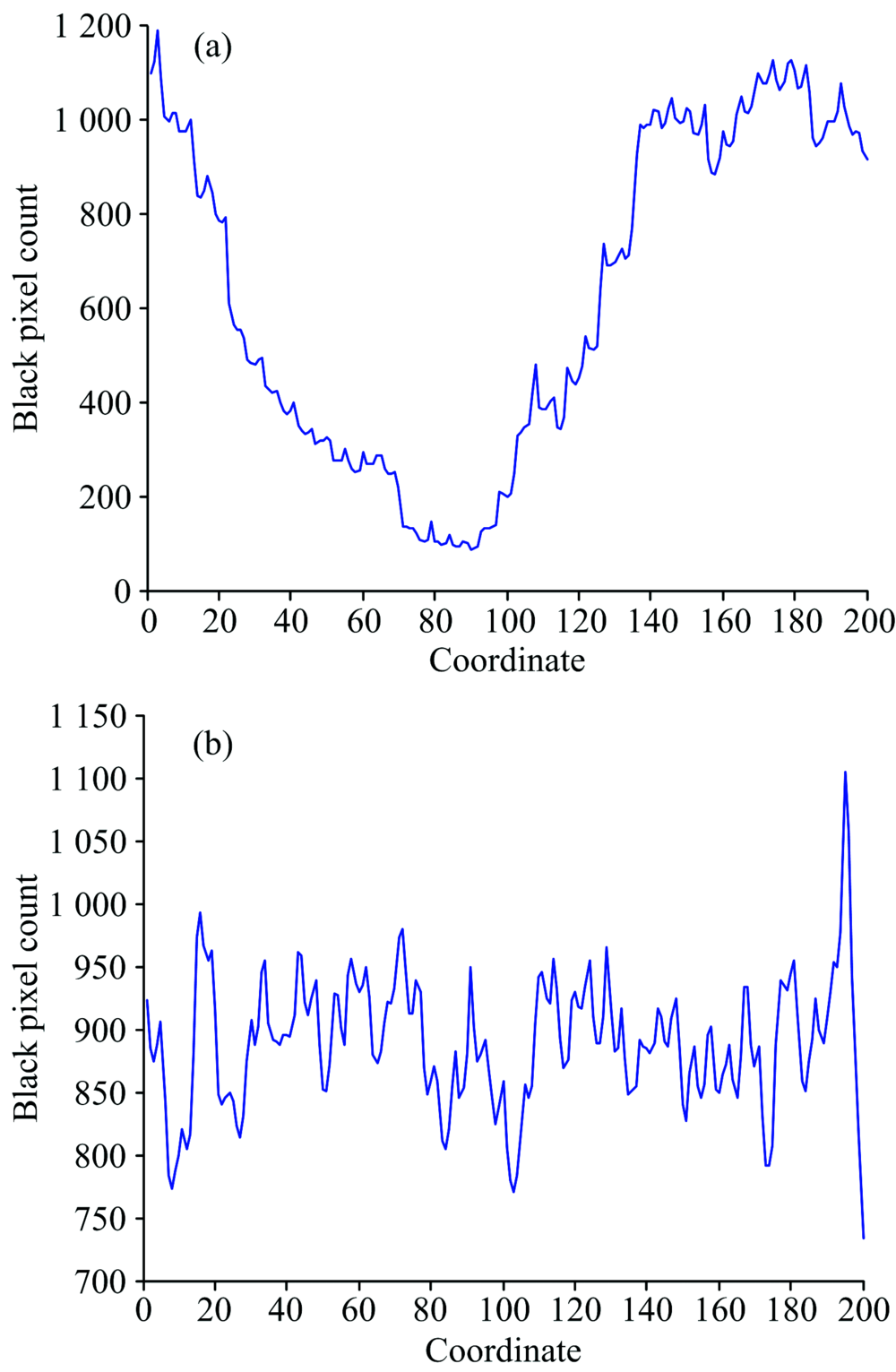
 | 图6 中间346列黑色像素点统计Fig.6 Black pixel statistics (346 columns in the middle) |
设置阈值为500, 若存在某一行中黑色像素点数目小于500, 则认为可能存在道路。 对于四边可能存在道路的情况, 找出其中最少像素点的坐标位置与起始点相减即为道路宽度; 对于图6的情况, 需从最小点坐标位置处向左向右延伸分别找到第一个极值点, 两个极值点坐标相减即为道路宽度。 设置道路宽度阈值为40, 若计算值小于40则认为不存在道路。
通过以上述方法分析, 图4(a)经算法计算道路宽度为87个像素值, 为验证算法的正确性, 在原始图像上手动测量获取道路宽度约为90个像素值; 图4(b)中不存在道路; 图5(a)中虽然存在小于500的位置, 但其计算得到的道路宽度为20, 小于道路阈值, 需舍去; 图5(b)经算法计算道路宽度为74个像素值, 在原始图像上手动测量获取道路宽度约为75个像素值; 图6经算法计算宽度为57个像素值, 在原始图像上手动测量获取道路宽度约为60个像素值。
2.2.2 玉米提取
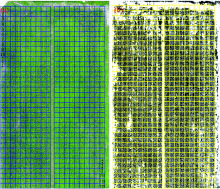
玉米的提取方法为在二值图像中选定某一特定大小的区域, 统计该区域内黑色像素点占总像素点的比例, 以此确定作物的多少。 选取图3作为处理对象, 选取80× 80像素值作为单位面积。 由于在图像的上边界、 右边界以及中间处存有道路, 在实际处理过程中需要将这些道路排除在算法处理之外, 对处理图像进行分块标记, 可以得到区块数为720, 如图7所示。
 | 图7 处理区域分块Fig.7 Processing region |
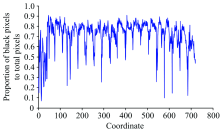
对单位面积的分块处理方法是进行全区域扫描, 每当扫描到一个黑色像素值就将总的统计面积加1, 直至扫描到6 400个像素点, 计算其中含有的总的黑色像素值数目与6 400的比值。 图7中所有720个区块黑色像素点占总像素比例的折线图如图8所示。
 | 图8 黑色像素占总像素点的比例Fig.8 The proportion of black pixels in total pixels |
计算图像中黑色像素数与总像素数之比, 即为玉米覆盖度。 玉米覆盖度为
式(6)中, Cc为植被覆盖度, CC为图像中的黑色(玉米)像素总和, A为图像的像素总和。
根据式(6)得到玉米覆盖度, 结合式(5)即可得到玉米叶面积指数为
根据式(7)可以完成玉米叶面积指数的计算, 从而为玉米长势监测提供依据。
玉米的种植地块, 除了玉米外, 还包括道路、 水管、 作物残渣等复杂背景, 通过图像分割算法可以将玉米作物从复杂的背景中提取出来, 从而为玉米田间管理及早期产量估算提供一定的参考信息。 此外, 光照和作物阴影会对图像分割造成较大影响, 因此需要对分割方法进行改进以克服光照和阴影的影响, 从而准确提取出玉米图像, 以获得其覆盖度。
以无人机为遥感平台, 搭载影像传感器构建遥感系统, 获取玉米地块的可见光谱彩色遥感影像。 通过ENVI软件对玉米冠层可见光谱彩色遥感图像进行预处理, 然后利用AP-HI算法进行作物分割来提取玉米覆盖度信息, AP-HI算法对农田复杂背景具有较好的适应力, 能够准确分割出玉米作物, 在此基础上, 通过冠层孔隙率方法建立覆盖度与叶面积指数模型, 完成玉米叶面积指数反演。 研究结果表明, 无人机遥感系统可以进行低空图像数据采集, 能够有效提取作物覆盖度, 为玉米长势监测提供依据。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|