

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于近红外漫反射测量的车载式原位土壤参数检测仪开发
[周鹏 , 李民赞
, 李民赞* , 杨玮, 冀荣华, 孟超]
, 李民赞, 杨玮, 冀荣华, 孟超]
|
|


作者简介: 周 鹏, 1990年生, 中国农业大学信息与电气工程学院博士研究生 e-mail: zhoupeng@cau.edu.cn
农田变量施肥作业需要对农田土壤养分信息进行高精度的快速原位采集, 已有的设备不能满足精细农业田间测量的需要, 为此基于近红外漫反射测量开发了一款新型车载式原位土壤参数检测仪。 检测仪采用光照稳定性更好的卤钨光源代替太阳光进行土壤光谱检测, 以提高仪器对工作条件的适应性。 由7个敏感波长(1 070, 1 130, 1 245, 1 375, 1 450, 1 550, 1 680 nm)构成的土壤氮素测量极限学习机模型提高了仪器的测量实时性和精度。 检测仪由机械部分、 光学部分及控制部分组成。 机械部分为检测仪提供平台支撑, 光学部分为检测仪提供检测光源, 主要由卤钨光源、 光源转接法兰、 近红外导光光纤、 检测总成(含入射光出口端、 InGaAS光电探测器及7个敏感波长的滤光片)等组成, 控制部分实现对土壤测量信号的采集及处理。 检测仪工作时, 卤钨光源通过近红外导光光纤、 检测总成中的入射光出口端将检测光源传输到待测土壤表面, 通过测量土壤表面漫反射光的光谱反射率检测土壤养分参数。 在卤钨光源和近红外导光光纤连接处设计光源转接法兰, 最大限度的减小检测光源在传输过程中的损失。 漫反射光经过检测总成中的滤光片滤波后, 由相应的InGaAS光电探测器实现光电转换, 再经信号处理单元计算出各个敏感波长处的反射率。 检测仪采用灰度标准板进行光学标定测试, 测试结果显示, 检测仪在7个敏感波长处的反射率与MATRIX-I型傅里叶光谱分析仪反射率相关系数最高为0.997 8, 平均值为0.927 8, 表明检测仪有较高的检测精度。 为进一步对检测仪农田土壤养分的检测精度进行评估, 进行了检测仪的农田应用试验, 检测结果表明检测仪检测值与实验室标准检测方法检测值的相关系数都在0.90以上。 试验结果表明, 车载式原位土壤参数检测仪能够实现对农田土壤养分信息的快速原位高精度检测。
Variable fertilizing requires the rapid and in-situ high-accuracy collection of farmland soil nutrients information. However, existing equipment could not meet the needs of field measurement in precision agriculture. Hence, a vehicle-mounted in-situ soil parameters detector was developed based on near-infrared (NIR) diffuse reflection. The detector used a tungsten halogen light source with better illumination stability instead of sunlight to perform soil spectrum detection to improve the adaptability of the instrument to working conditions. A soil total nitrogen measurement extreme learning machine model consisting of seven sensitive wavelengths (1 070, 1 130, 1 245, 1 375, 1 450, 1 550, 1 680 nm) was developed to improve the real-time measurement accuracy. The detector consisted of a mechanical part, optical part and control part. The mechanical part provided platform support for the detector, The optical part was composed of a halogen tungsten light source, a light source adapter flange, a NIR guiding fiber, and a set of detection assembly including an incident light exit end, seven InGaAS photodetectors, and seven single-band filters. The control part realized the collection and processing of the soil measurement signal with a MSP430F149 main control chip module When the detector performed farmland soil nutrients detection, and the tungsten halogen light source transmitted the detection light source to the surface of the detection soil through the NIR guiding fiber and incident light exit end of the detection assembly. The diffuse light from the surface of the detection soil was used to detect soil nutrient parameters. A light source adapter flange at the junction of the tungsten halogen light source and the NIR guiding fiber was designed to minimize the loss of the detection source during transmission. The filter of detection assembly filtered the diffuse light to become a single-band detection light, and the InGaAS photodetector realized photoelectric conversion of the single-band detection light, and the signal processing unit calculated the reflectance at each sensitive wavelength. After the development of the detector was completed, a standard gray board was used as the measurement object to conduct the optical calibration test. The test results showed that the correlation coefficient ( R) between the reflectance value of the detector at seven sensitive wavelengths and the reflectance value of the MATRIX-I type Fourier spectrum analyzer had a maximum of 0.997 8 and an average of 0.927 8, which indicated that the detector had higher detection accuracy. In order to further evaluate the detection accuracy of farmland nutrients content using the detector, and the farmland application test of the detector was carried out at the Tongzhou Experimental Station of China Agricultural University. The test results showed that the correlation coefficient ( R) between the measured value of soil nutrients content using the detector and the laboratory standard test method were all above 0.90. The test results showed that the vehicle-mounted in-situ soil parameters detector could realize rapid in-situ high-accuracy collection of farmland nutrients information.
基于信息与通信技术的作物精细管理可通过变量施肥、 精量播种、 石灰和除草剂的精细管理等现代农业技术来增加收益并减少对环境的影响。 定点、 定时获取土壤属性信息是进行变量作业和作物定点、 定时精细管理的前提[1, 2]。 土壤全氮和含水率是土壤养分检测的两个最重要指标[3, 4], 为提高作物产量及品质, 需要快速原位获取高精度的土壤全氮、 含水率信息, 并根据获取的信息及时做出人工干预, 保证土壤全氮和含水率处于作物生长最佳的状态。 然而传统的土壤采样和实验室分析费力且昂贵, 并且采样网格不够密集, 不能够做到大范围、 快速原位的土壤养分信息采集[5, 6]。 因此, 需要研发一种应用于农田土壤全氮和含水率快速原位检测的高精度检测仪。
近红外漫反射光谱测量在土壤养分估算及其相应的检测仪开发领域得到越来越广泛的应用, 已成功对土壤有机质, 土壤全氮, 土壤有机碳和土壤水分等进行了实验室检测, 并都取得了较好的预测结果[7, 8, 9]。 在检测仪开发方面, 李民赞等基于近红外漫反射测量, 开发了便携式土壤有机质及土壤全氮检测仪, 开发的仪器都取得了较好的实验室检测结果[10, 11]; Shibusawa等开发了车载式可见-近红外光谱检测仪, 检测仪检测结果经过后续复杂的数据处理, 可以对土壤全氮、 有机质和含水率等土壤参数进行预测[12]; Mouazen等开发了基于可见-近红外光谱的车载式土壤磷元素检测仪, 并根据检测结果开展了土壤磷元素的变量施肥作业研究[13, 14]。
以上几款基于光谱学原理的土壤检测仪器中, 便携式仪器尚无法实现田间的实时在线测量[10, 11], 而车载式仪器或者价格过于昂贵, 只适用于科学研究[12], 或者测量的参数和精度还不能满足精细农业生产需求[13, 14]。 本研究开发了一款新型基于近红外漫反射测量的车载式土壤参数原位检测仪, 能够以较低的成本提供高密度、 快速原位的大范围农田土壤全覆盖测量, 实现对大田土壤全氮、 含水率的快速原位高精度检测, 并为农业的精细化管理决策提供信息支持。
1.1.1 近红外漫反射测量光学系统设计
根据实验室前期的试验研究和便携式土壤全氮检测仪开发经验, 确定用于检测土壤全氮含量和含水率的7个近红外敏感波长(1 070, 1 130, 1 245, 1 375, 1 450, 1 550和1 680 nm)[15, 16], 提出了基于近红外漫反射测量的车载式原位土壤养分检测仪总体设计方案, 如图1所示。
 | 图1 车载式原位土壤参数检测仪总体方案Fig.1 Overall design of vehicle-mounted in-situ soil parameters detector |
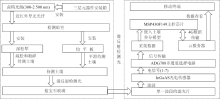
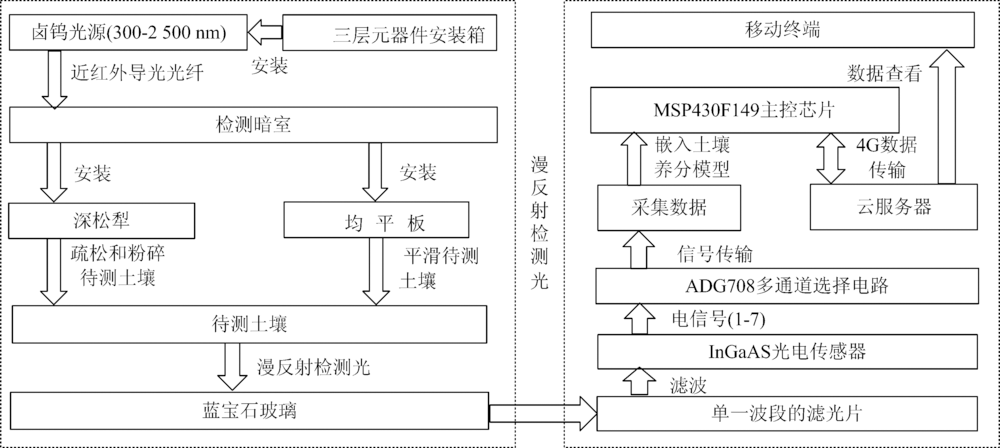
光学系统是车载式原位土壤参数检测仪的核心, 图2是车载式原位土壤参数检测仪光学系统原理图, 包括地上部分和地下部分。 地上部分主要有光源、 光源转接法兰和近红外导光光纤组成, 光源通过近红外导光光纤传输到地下的检测土壤表面, 由地下部分的检测总成实现光谱反射率的测量。 检测总成主要由入射光出口端、 InGaAS光电探测器及7个敏感波长的滤光片、 蓝宝石玻璃等组成。
 | 图2 车载式原位土壤参数检测仪光学检测示意图 1: 卤钨光源发射端; 2: 发射端光源转接法兰; 3: 近红外导光光纤; 4: 遮光防尘罩; 5: 入射端光源转接法兰; 6: 电子元件安装孔; 7: 电子元件保护罩; 8: 蓝宝石保护玻璃; 9: 犁柱; 10: 深松犁位置调节孔; 11: 深松犁; 12: 检测暗室; 13: 检测土壤Fig.2 Optical detection prototype of vehicle-mounted in-situ soil parameters detector 1: Halogen tungsten light source emitting terminal; 2: Transmitting light source adapter flange; 3: Near-infrared guiding fiber; 4: Blackout dust cover; 5: Incident light source adapter flange; 6: Electronic components mounting hole; 7: Electronic components cover; 8: Sapphire glass; 9: Shank; 10: Deep pine plow position adjustment hole; 11: Deep pine plow; 12: Detection of darkroom; 13: Testing soil |
检测光源对检测精度有着直接影响, 根据对各种光源特性的分析, 采用光照稳定性更好的卤钨光源(300~2 500 nm)代替太阳光进行土壤光谱检测。 近红外导光光纤与卤钨光源及检测端都设计了光源转接法兰, 保证检测光在传输过程中不受损失。 检测总成底平面安装了蓝宝石玻璃板, 它可以保护InGaAS光电探测器和滤光片等不被检测土壤污染, 保证检测仪的正常工作, 同时对入射光和反射光的损耗最小。
1.1.2 辅助机械系统和电子控制系统设计
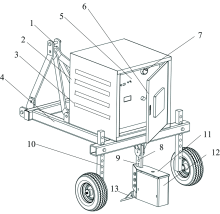
为了保证检测仪能在农田正常工作, 除了核心光学系统, 还包括辅助机械系统和电子控制系统。 辅助机械系统为整个检测仪提供平台支撑, 主要由三点悬挂结构(连接拖拉机)、 电子元器件安装箱、 载重支撑平台、 深松犁等组成。 整个检测总成固定在一台深松犁上。 深松犁通过开沟作业, 为地下检测总成提供测量所需的空间和待检测土壤平面。 电子控制系统实现对检测土壤近红外漫反射测量信号的采集及处理, 控制部分主要有MSP430F149主控芯片模块、 电路处理模块、 GPS模块等组成。 主控芯片模块将电路处理模块传送的检测信息输入到土壤养分预测模型, 从而计算得到土壤参数检测值。 图3是车载式原位土壤参数检测仪组成示意图。
 | 图3 车载式原位土壤参数检测仪示意图 1: 三点悬挂结构; 2: 电子元器件安装箱; 3: 散热通道; 4: 载物支撑平台; 5: 控制面板; 6: 安装箱前门; 7: 卤钨光源; 8: 犁柱; 9: 深松犁位置调节孔1; 10: 深松犁位置调节孔2; 11: 遮光防尘罩; 12: 检测暗室; 13: 深松犁Fig.3 Prototype of vehicle-mounted in-situ soil parameters detector 2: Three-point suspension structure; 2: Electronic component mounting box; 3: Heat dissipation channel; 4: Load support platform; 5: Control panel; 6: Front door of installation box; 8: Halogen tungsten light source; 8: Shank; 9: Deep pine plow position adjustment hole 1; 10: Deep pine plow position adjustment hole 2; 11: Blackout dust cover; 12: Detection of darkroom; 13: Subsoiler |
1.1.3 胶合滤光片选型及光谱透射性能分析
滤光片滤波性能是影响车载式原位土壤参数检测仪检测准确度的重要因素之一, 如果滤光片滤波性能较差, 会让非目标波段的漫反射光透过, 直接影响土壤参数的检测精度。 同时在仪器开发过程中还必须考虑成本。 滤光片镀膜技术的不断发展, 使得滤光片在理论上能够按照设计要求进行镀膜, 但是窄通镀膜滤光片成本过高, 不利于农业上的推广应用。 为此, 经过大量的市场调研, 最终采用滤光片胶合技术, 以较低成本满足滤光片滤波性能需求, 图4为采用胶合技术实现的目标滤光片性能曲线图。
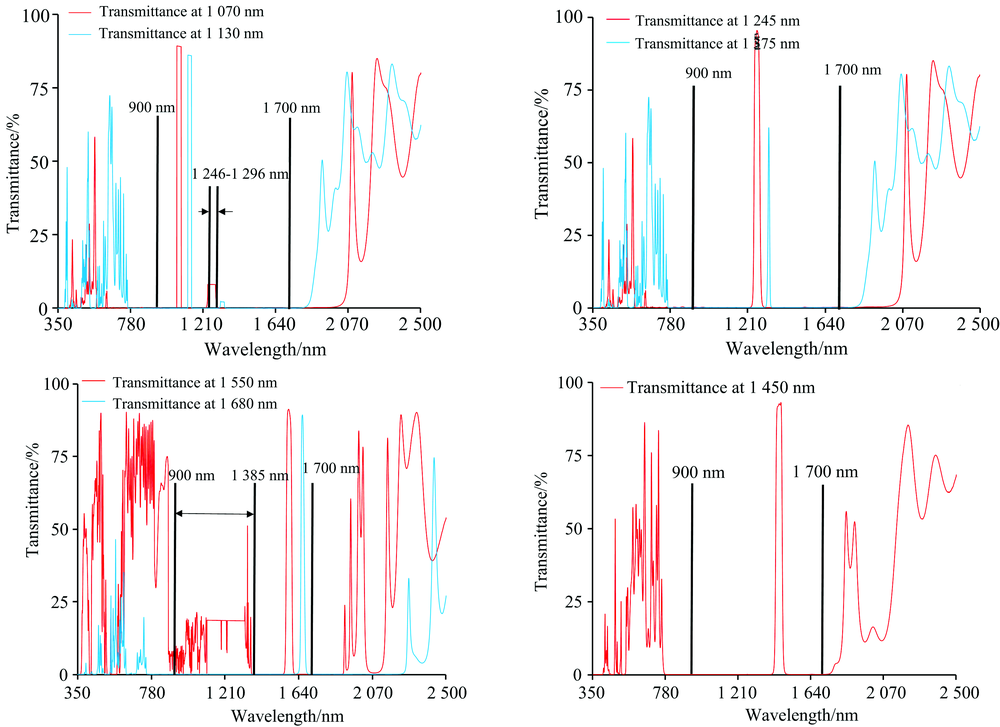 | 图4 胶合滤光片滤波性能曲线图 (a): 1 070和1 130 nm滤光片透射率; (b): 1 245和1 375 nm滤光片透射率; (c): 1 550和1 680 nm滤光片透射率; (d): 1 450 nm滤光片透射率Fig.4 Filtering performance curve of single-band filter (a): Transmittance of filter at 1 070 and 1 130 nm; (b): Transmittance of filter at 1 245 and 1 375 nm; (c): Transmittance of filter at 1 550 and 1 680 nm; (d): Transmittance of filter at 1 450 nm |
从图4(a, b, c, d)分别可以看出, 胶合滤光片基本满足了原位检测仪对滤光片性能的需求。 卤钨光源通过近红外导光光纤传输到检测土壤表面, 而近红外导光光纤仅能对900~1 700 nm波段的近红外光进行导通, 因此在滤波时只需考虑900~1 700 nm波段的近红外光即可。 通过对滤光片性能曲线进行分析, 对1 245, 1 375, 1 450和1 680 nm的滤光片, 完全满足对900~1 700 nm非目标近红外光进行滤波的要求; 1 070 nm的滤光片不能对1 246~1 296 nm附近的近红外光进行滤波; 1 130 nm的滤光片对1 320 nm的近红外光滤波效果较差, 但透过率都在10%以下; 1 550 nm的滤光片, 对900~1 385 nm的近红外光不能完全进行滤波, 在1 355 nm附件, 透过率在50%左右; 1 550 nm的滤光片对900~1 385 nm的近红外光滤波效果较差, 但是透过率基本都在20%左右。 综合考虑实际的滤光片性能、 开发成本, 上述采用胶合技术的滤光片能够基本满足原位检测仪的开发需求。
1.2.1 光学标定试验设计
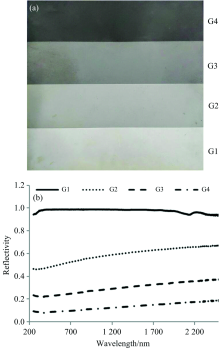
车载式原位土壤养分检测仪开发完成后, 对检测仪进行光学标定测试。 选择标准板为测量对象, 标准板包含四块不同灰度的朗伯体平板(从白到黑依次用G1—G4表示)[见图5(a)], 图5(b)为标准板及其标准反射率[17], 不同灰度值下的标准反射率各不相同, 每隔10min测量一次, 每次测量重复5次取其平均值, 连续5 h内7个敏感波长处的反射率数据; 同时, 使用MATRIX-I型傅里叶光谱仪检测标准板以更好地评估车载式土壤养分原位检测系统的稳定性和可靠性。
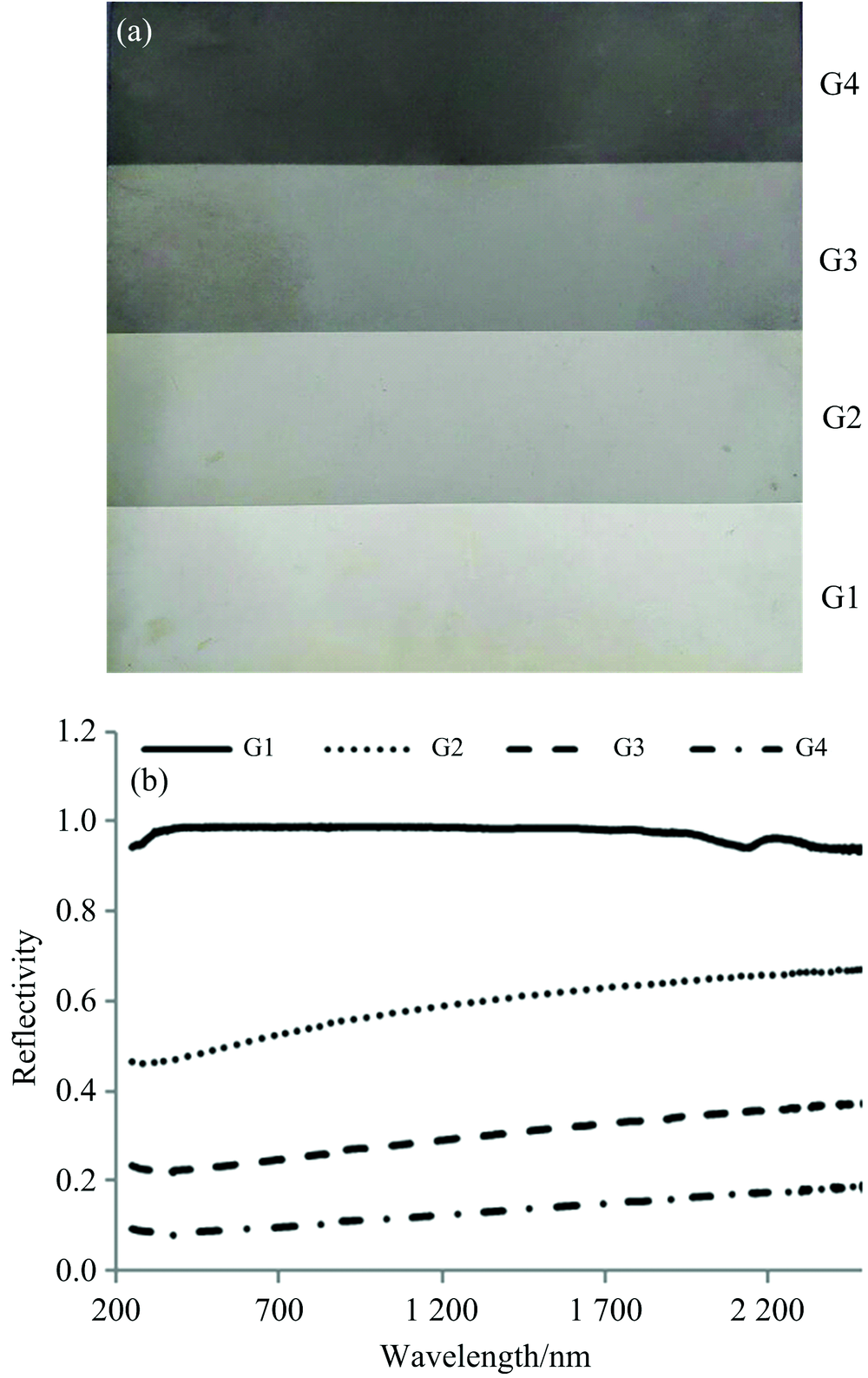 | 图5 标准板及其标准反射率 (a): 标准板; (b): 标准板的标准反射率Fig.5 Spectral reflectance of the standardgray board (a): Standard gray board; (b): Standard spectral reflectance |
1.2.2 田间试验
为了对车载式原位土壤参数检测仪农田检测效果进行评估。 2019年5月16日在中国农业大学通州实验站根据拟好的实验方案进行田间试验。 实验田面积为3 000 m2, 每年冬小麦和夏玉米轮作。 实验田土壤粉粒、 沙粒和粘粒占比为27%, 57%和16%, 根据美国农业部土壤质地分类方法, 土壤质地为砂壤土。 实验内容包括数据采集和土样采集, 首先进行数据的采集, 车载式检测仪的检测速度设定为0.88 m·s-1, 数据采集的间隔为1 s。 每隔4~6 m设定一个检测点, 总共选择了103个检测点, 每个检测点插入一个标杆, 便于土样采集。 每个土壤样本采集2 kg, 用双层牛皮袋封装样品, 防止水分散失, 样本采集完成后, 立即送往实验室, 用实验室方法测定采集土壤样本全氮含量及含水率[18]。
以MATRIX-I 型傅里叶光谱仪作为基准, 以图5所示的标准板为对象, 对车载式原位土壤参数检测仪在7个敏感波长处测得的反射率数据进行了精确度分析, 计算了两种测量数据之间的相关系数, 分析结果如表1所示。
| 表1 车载式原位土壤参数检测仪光学标定测试结果 Table 1 Optical calibration test of vehicle-mounted in-situ soil parameters detector |
从表1中可以看出, 车载式原位土壤参数检测仪在7个敏感波长处的反射率数据与MATRIX-I型傅里叶光谱仪的反射率数据高度相关, 相关系数的最小值为0.861 5, 最大值为0.997 8, 平均值为0.927 8, 光学标定测试结果表明检测仪可以在相对较长的时间内保持良好的稳定性和可靠性, 满足长时间、 快速原位高精度土壤检测的要求。
2.2.1 土壤含水率检测分析
土壤含水率既是重要的土壤参数, 又与光谱数据之间存在高度相关性, 因此利用开发的车载式原位土壤参数检测仪首先开展了田间土壤含水率检测试验。
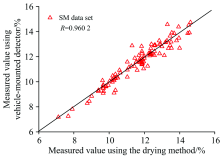
利用车载式原位土壤参数检测仪在土壤含水率敏感波段1 450 nm测得的103个农田土壤含水率值及烘干法测得的标准土壤含水率值, 建立了土壤含水率与烘干检测值的1:1关系, 如图6所示。
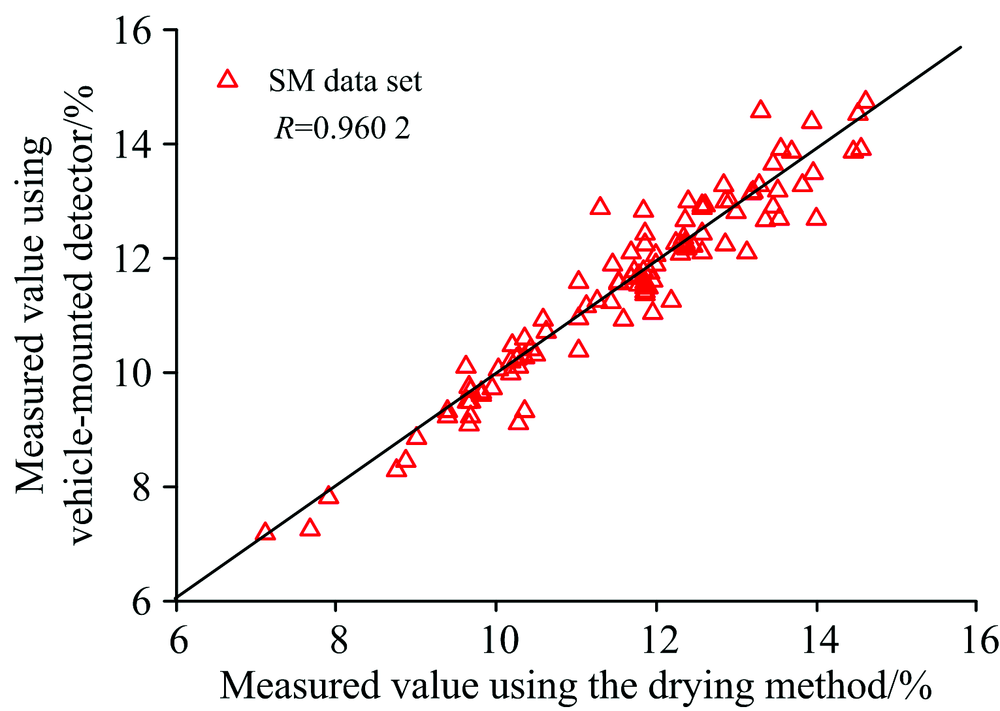 | 图6 农田土壤含水率检测值Fig.6 Field detection of SM |
从图6可以看出, 农田土壤含水率检测值均匀的分布在回归线两侧, 只有个别检测值距离回归线较远, 相关性分析结果相关系数r为0.960 2, 结果表明, 车载式原位土壤参数检测仪农田土壤含水率检测精度达到了较高的水平。
2.2.2 土壤全氮检测结果分析
车载式原位土壤参数检测仪嵌入的土壤全氮预测模型为极限学习机模型, 极限学习机模型为单隐含层前馈神经网络, 网络包含输入层、 隐含层和输出层, 隐含层与输入层和输出层之间通过神经元间全连接。 同时, 极限学习机模型在模型设置和网络训练过程中, 只需设置隐层神经元个数, 并且在网络训练过程中不需要调整网络的输入权值以及对隐元进行设置, 因此具有学习速度快、 泛化性能好的优点。 极限学习机模型结构会因激励函数的不同而改变, 常用的激励函数有Sigmoid, Sine和Hardlim等, 车载式原位土壤参数检测仪嵌入的极限学习机模型, 隐含层神经元个数为72, 激励函数为Sigmoid函数。
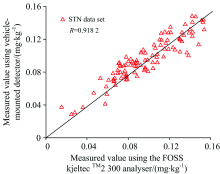
利用嵌入极限学习机模型的车载式原位土壤参数检测仪测得的103个农田土壤全氮值及凯氏定氮仪测得的标准土壤全氮值, 其中凯氏定氮仪采用瑞典FOSS公司的KjeltecTM 2300全自动凯氏定氮仪[9]。 建立了农田土壤全氮车载式原位土壤参数检测仪检测值及凯氏定氮仪检测值的1:1关系图, 从图7可以看出, 农田土壤全氮检测值均匀的分布在回归线两侧, 相关性分析结果相关系数r为0.918 2, 结果表明车载式原位土壤参数检测仪农田土壤全氮检测精度也达到了较高的水平, 满足农田参数实时原位测量的需要。
 | 图7 农田土壤全氮检测值Fig.7 Field detection of soil total nitrogen |
(1)开发了一款基于近红外漫反射光谱测量的车载式原位土壤参数检测仪。 采用光照强度和稳定性更好的卤钨灯作为光源, 进一步提高了检测仪的检测精度。 光学标定测试结果表明, 车载式原位土壤参数检测仪与MATRIX-I型傅里叶光谱仪具有良好的一致性, 检测仪可以稳定工作5h以上。 满足农田土壤养分快速原位高精度检测的需求。
(2)对车载式原位土壤参数检测仪农田试验检测结果与实验室标准检测方法检测结果进行对比分析, 土壤全氮含量和含水率检测结果与实验室标准检测方法检测结果的相关系数都在0.90以上, 结果表明, 车载式原位土壤参数检测仪农田土壤全氮、 含水率检测精度高, 实现了对大面积农田土壤全氮含量和含水率参数的快速原位高精度检测。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|