

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于天空光遮挡法的漂浮式水体光谱测量系统研制
[田礼乔1  , 李森
, 李森1, * , 孙相晗1 , 童如清1 , 宋庆君2 , 孙兆华3 , 李勇1 ]
, 李森, 孙相晗|
|


作者简介: 田礼乔, 1980年生, 武汉大学测绘遥感信息工程国家重点实验室教授 e-mail: tianliqiao@whu.edu.cn
精确的现场水体光谱特性测量与分析是水色遥感领域亟待解决的重要基础问题。 传统的剖面法、 水面之上法等水体光谱现场测量方法无法直接测得离水辐亮度( Lw), 后处理过程比较复杂, 不确定性较大。 天空光遮挡法(SBA)实现了对水体离水辐亮度的直接测量后处理流程相对简单, 能较好地避免传统现场光谱测量方法的许多不确定因素。 但目前为止, 国际上还没有成熟的基于SBA方法的水体光谱测量系统, 因此基于SBA方法开展新型水体光谱测量系统研制与测试具有重要的理论与现实意义。 作者在系统分析SBA水体光谱现场获取原理的基础上, 介绍了首套基于SBA方法的漂浮式水体光谱测量系统的研发情况, 详细阐述了其硬件结构设计及系统单元设置情况。 通过2017年9月20日珠江口(113°32'38″E, 22°25'43″N)的系统现场测试分析验证了该系统分钟级高频次连续水体光谱采集能力。 该系统实现了连续直接观测得到离水辐亮度和入射辐照度进而计算得到遥感反射率( Rrs)的功能, 其变异系数均小于5%, 将系统观测结果与Maya2000 Pro同步观测获得的遥感反射率对比, 表现出良好的一致性, 证明了该系统采用SBA方法进行水体遥感反射率测量的有效性。 连续观测实验证明了该系统水体遥感反射率测量的稳定性以及快速跟踪水体光学特征变化的能力。 论文指出了基于SBA漂浮式水体光谱测量系统发展起来的漂浮式光学浮标(FOBY)在自阴影评估与校正、 数据质量控制、 数据高频获取、 浮标姿态记录、 多要素联合观测、 长时序大范围组网等方面存在的问题及未来发展前景。 综上所述, 基于SBA方法研发的漂浮式水体光谱测量系统能实现水体光谱的高频观测, 以及水体光学特性的快速变化动态跟踪, 有助于提高现场测量与卫星遥感数据的匹配效率; 基于该系统, 在建立传感器观测网的基础上可以获取水体光谱大数据集, 有利于大幅提高各种卫星数据水色遥感应用潜力。
It has been a long-standing and challenging goal to precisely measure water-leaving radiance (Lw) in ocean color remote sensing. Conventional approaches like in-water profile method, above-water method and other water measurement methods cannot directly measure Lw. Thus, they demand complex post-measurement processes, which cause many uncontrollable factors. Skylight-blocked approach (SBA), proposed by Zhongping Lee in 2013, was an innovative method to directly measure Lw, which can avoid uncertainties caused by post-measurement processes. However, no water spectral measurement system based on SBA has been developed so far. It is of great theoretical and practical significance to develop and test such equipment. Based on SBA, a water spectral measurement system was developed in this study. Firstly, the principles of the field water-spectrum measurement method, SBA is introduced. Then, the hardware structure and system design of the system are described in detail. The field experiment in Pearl River Estuary (113°32'38″E, 22°25'43″N) was carried out on September 20, 2017 to test the continuous measurement ability of the system. The system can measure Lw and downward irradiance of water ( Es) directly and synchronously and then calculated the Rrs. The coefficients of variation (CV) of them are less than 5%, which basically proves the effectiveness of the water spectral measurement system in Lw measurement. The measurements results of the system are in good agreement with those of Maya2000 Pro synchronous. The continuous observation experiments show the stability of measurements and the ability to track the change of optical characteristics of water. The existing problems and future development prospects are pointed out, such as self-shading correction, data quality control, high frequency measurement, buoy tilts recording, multi-factor joint measurement, long time series and large range networking, etc. To summarize, the water spectral measurement system based on SBA called the Floating Optical Buoy (FOBY) can measure Lw directly in high the frequency of minutes which can track the rapid dynamic change of water optical characteristics. It is expected to improve the matching efficiency between in-situ measurement data and satellite remote sensing data. Based on the system, big data sets of water spectral can be obtained by means of the network. It is conducive to greatly improve the application potential of various satellite data on ocean color remote sensing.
水色遥感是卫星对地观测系统中重要的组成部分。 海洋水色遥感在海洋初级生产力的估算、 海洋碳循环研究、 海洋生态环境监测、 海洋动力学研究、 海洋渔业开发管理等方面都具有广泛的应用前景与深远的研究意义[1, 2]。 湖泊水色遥感则是海洋水色遥感的理论和技术在湖泊水体进一步的丰富、 发展, 在全球气候变化湖泊区域响应、 湖泊水体污染事件监测预警等方面具有重要应用[3]。 水体遥感反射率(remote-sensing reflectance, Rrs, sr-1)或离水辐亮度(water-leaving radiance, Lw, W·m-2·nm-1·sr-1)是海洋与湖泊水色遥感的最基础物理量, 是描述水体光谱特性的重要参数之一。 由于测量技术的限制以及水体状况的不确定性, 准确测量离水辐亮度仍然是一个极具挑战性的工作[1], 因此精确的现场水体光谱特性测量与分析是水色遥感领域亟待解决的重要基础问题[4]。
常见的水体遥感反射率现场获取方法有四种: (1) 剖面法(in-water profiling method); (2) 水面之上法(above water method); (3)水面漂浮法(surface floating method)和(4)天空光遮挡法(skylight-brocked approach, SBA)。 剖面法, 通过纵向测量水下不同深度水体的光学特性并外推得到水表面的光学信号, 从而求得遥感反射率等物理量。 剖面法一般采用的仪器比较昂贵, 仪器操作、 布放复杂, 而且受一定自阴影影响, 数据结果有一定的不确定性, 一般只能用于水深大于10 m水体, 因此这种方法在大洋Ⅰ类水体中应用十分广泛, 但在浑浊浅水区则无用武之地[5]。 水面之上法, 是指在水面上方采取适当的观测几何, 通过观测海面、 对应方向上天空光和海面入射辐照度(或水平放置的标准板)等目标, 来求得遥感反射率的方法。 水面之上法具有现场操作简单、 现场实验成本低等优点, 是目前Ⅱ 类水体光谱特性研究中最常用的测量方法, 但受海面、 天气条件等的影响, 在现场很难保证严格的观测几何, 同时目前天空光剔除方法也还存在较大争议, 复杂的现场观测条件以及基于经验和其他假设条件下的数据处理方法也给遥感反射率结果带来很多不确定性[6]。 水面漂浮法, 通过测量刚好位于水表面下的上行辐射照度, 推算水面以上离水亮度, 在现场测量中应用较少。
天空光遮挡法用一个遮光罩直接遮挡住天空光, 使其不进入观测传感器视场, 从而实现对水体离水辐亮度的直接测量[1], 避免现场复杂性引起的观测几何误差以及天空光剔除方法带来的不确定性, 也具有更简单的后处理流程。 1999年Ahn等提出了遮挡天空光的思路, 2006年Tanaka等设计了半球形罩子的测试装置进行了实验, Lee等基于Satlantic HyperPro Ⅱ 系统配套锥形遮光罩设计了一套测量系统, 在诸多水域开展了应用, 并对天空光遮挡法测量的问题进行了详细深入地讨论[7]。 但目前为止, 国际上还没有成熟的针对SBA方法的双通道一体化水体光谱测量系统, 因此基于SBA方法开展一定的双通道水体光谱测量系统研制与测试显得尤为重要。
本文的主要贡献在于: (1) 对比分析了水体光谱现场测量中水面之上法与天空光遮挡法的基本测量原理; (2) 介绍了研制的漂浮式水体光谱测量系统硬件结构及系统单元设置; (3) 进行了珠江口现场测试, 评价了现场实验结果; (4) 指明了类似系统的研发方向。
遥感反射率(Rrs, sr-1)定义为水体离水辐亮度(Lw, W·m-2·nm-1·sr-1)与水面入射辐照度(Es, W·m-2·nm-1)的比值
式中: Lw为离水辐亮度, Es为水面入射辐照度。
传统的水面之上法无法直接获得水体离水辐亮度Lw, 测量原理如图1(a)所示, 一般通过式(2)计算水体遥感反射率Rrs。
式中: Lu, Lsky和Lp分别为光谱仪面向水体、 天空和标准板时测量的信号, ρ f和ρ p为水-气界面反射率和标准板反射率。
现场测量中, 仪器观测平面与太阳入射平面的夹角90°≤θ ≤135°, 仪器与海面方向夹角30°≤θ ≤45°, 如图1(a), 需要满足严格的观测几何以避免太阳直射反射(耀斑)和白帽的影响, 公式中重要参数水-气界面反射率ρ f的确定也极富挑战且对水体遥感反射率Rrs测量准确度有很大影响[5, 8, 9]。
区别于剖面法和水面之上法, 天空光遮挡法可以直接测量获得水体离水辐亮度[2]。 图1(b)展示了天空光遮挡法的基本原理, 辐亮度探头下端安装一个锥形遮光罩, 观测时, 下端开口浸没水面以下几厘米, 同时保持辐亮度探头始终高于水面, 遮光罩阻挡了大气散射光和水面反射的天空光信号进入辐亮度探头, 这样就可以实现离水辐亮度的直接测量。
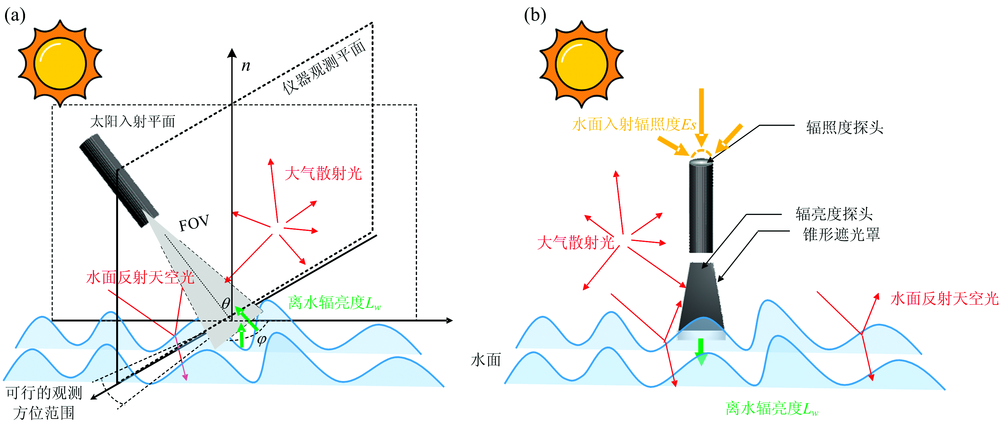 | 图1 水面之上法(a)和天空光遮挡法(b)的测量原理 图(a)中FOV为辐亮度传感器视场, θ 是仪器观测方向与海面法线的夹角, 即观测天顶角; φ 是仪器观测平面与太阳入射平面的夹角, 即观测方位角Fig.1 Schematic diagram of above-water method (a) and skylight-blocked approach (b) In Fig.1 (a), the FOV is the field of view of the radiance sensor, θ is the angle between the instrument observation direction and the sea surface normal, that is, the observation zenith angle; φ is the angle between the instrument observation plane and the solar incident plane, that is, the observation azimuth angle |
相较于水面之上方法和剖面法, 天空光遮挡法具有三大优势[7]: (1)实现了离水辐亮度的直接观测。 剖面法和水面之上法测量无法直接测得离水辐亮度, 需要上行辐亮度外推和天空光去除等后处理过程, 天空光遮挡法可直接观测离水辐亮度, 减少了后处理过程带来的不确定性; (2)适宜不同水体类型的布放与观测。 剖面法仪器布放复杂, 在大洋Ⅰ类水体中应用十分广泛, 但在浅海及较浑浊水域, 测量误差较大, 天空光遮挡法可以实现大洋、 海岸带、 内陆水体等不同水体类型的布放与观测; (3)测量步骤简便, 受环境影响小。 水面之上法需要满足严格的观测几何以避免太阳直射反射(耀斑)和白帽的影响, 易被环境因素影响测量结果的准确性。 与之相比, 天空光遮挡法对观测几何要求不高, 测量流程简便, 可以提高现场观测效率和准确性。
漂浮式水体光谱测量系统的设计满足以下的标准及功能: (1) 集成两套独立的高光谱辐射测量模块, 实现离水辐亮度和水面太阳入射辐照度的同步测量; (2) 具有无人值守的独立观测能力, 能够在海洋及湖泊的涌流、 波浪中保持不倾覆, 并能避免水生生物附着对于传感器观测的影响; (3) 搭载GPS卫星定位模块和姿态记录模块, 实时记录观测系统的位置、 姿态, 并通过无线天线回传水体光谱观测结果; (4) 结构设计小型化, 尽可能少受自阴影影响, 可以由小型船只运载与布放。
漂浮式水体光谱测量系统采用模块化设计, 包括浮体和四个主要模块: 光谱测量模块、 控保与数传模块、 定位与姿态记录模块和供电模块。 图2展示了漂浮式水体光谱观测系统的模块和结构。
 | 图2 漂浮式水体光谱测量系统 浮体包括(a)上盖和(b)观测架; 光谱测量模块包括两个光学探头: (c)辐照度探头和(d)辐亮度探头, (e)传输光纤和两个(f)光谱仪, 辐亮度探头下装(g)锥形遮光罩以及(h)探头清洁刷; 控保与数传模块由集成CPU的(i)总控板和(j)无线传输天线组成; 定位与姿态记录模块由(k) GPS和姿态传感器组成; 电源模块由锂电池和(l)通电线路组成Fig.2 Schematic diagram of the floating water spectral measurement system The system includes (a) the upper cover and (b) the observation frame; The spectral measurement module consists of two optical sensors: (c) the irradiance sensor and (d) the radiance sensor, (e) the optical fiber and (f) two spectrographs, radiance sensor equipped with (g) a cone and the irradiance sensor equipped with a (h) cleaning brush; control-protection and data transmission module are composed of (i) master control board integrated with CPU and (j) wireless transmission antenna. The positioning and attitude recording module is composed of (k) GPS and attitude sensor; the power module consists of (l) lithium battery and wires |
漂浮式水体光谱测量系统采用小型漂流浮体结构设计, 总体方案设计兼顾其稳定性, 在流体作用下的运动性能及浮体自阴影对光谱测量准确度的影响。 浮体环形大内径, 窄舱体的设计尽量避免仪器自阴影对观测的影响, 采用黑色喷漆减少其对水面光场的影响。
光谱测量模块采用与TriOS RAMAES辐照度与辐亮度探头一致的德国ZEISS的Monolithic Miniature Spectrometer 1 (MMS1)光谱仪, 波段范围为310~1 100 mm, 波谱分辨率约为3 nm, 波长精度0.3 nm。 两光学探头委托北京航天三院303所用积分球进行光学探头定标, 定标波长范围为380~780 nm, 视场角8°, 详细的定标方法可参见文献[10]。 光学探头采用双通道设计, 将两个探头集合起来, 辐照度光学探头向上观测太阳入射辐照度, 装有锥形遮光罩的辐亮度光学探头向下进行离水辐亮度测量。 由于漂浮式水体光谱测量系统运行环境为水环境, 探头的结构设计中加入水密设计, 保证作业的稳定性。
辐亮度光学探头下安装一个锥形遮光罩, 锥型遮光罩的设计避免了大气散射光、 水面反射的天空光及太阳光进入辐亮度探头视场, 保证直接测得离水辐亮度。 锥形遮光罩设计为两端开口的圆锥形, 高130 mm, 上口径33 mm, 下口径49 mm, 保证管壁倾角与辐亮度探头视场角一致, 在不影响辐亮度测量下尽量减小体积。 上端通过螺纹与上盖拧合, 下端通过浮体自稳性设计始终淹没水面, 阻挡天空散射光和水面反射的太阳光进入其视场, 保证测得的为水体的离水辐亮度, 并采用黑色喷漆, 减少仪器对周围光场的影响。
系统为辐照度探头和辐亮度探头设计了两个清洁刷, 清洁刷采用弧形设计避免清洁过程中对光学探头观测的影响, 处于非工作状态时也不遮挡光学探头视场。
定位与姿态记录模块中GPS可准确记录观测系统位置的经纬度信息, 用于观测系统定位、 观测系统状态监控及数据质量检验。 姿态传感器实时测量姿态数据包括观测系统工作状态的偏离竖直方向角度, 测量精度0.1°, 可准确记录采集光谱数据时对应的姿态, 用于剔除由于姿态偏差较大出现的异常数据。
系统软件分为数据传输模块, 数据处理模块, 数据展示模块。 数据传输模块包括传感器开关机, 测量频率、 测量时间、 测量方式等远程设置, 数据接收等功能; 数据处理模块包括光谱饱和数据剔除、 暗电流扣除、 积分时间归一化功能; 数据显示包括水面入射辐照度、 离水辐亮度、 遥感反射率、 测试站位的GPS位置、 仪器观测姿态等关键参数可视化实时显示功能。
珠江是我国第二大河, 有西江、 北江和东江三个主要支流, 通过八大口门流入南海。 珠江口范围从珠江三角洲海岸到南海北部海域, 随着珠江三角洲的快速经济发展和城市化, 珠江口海域已处于严重污染状态, 2017年《中国海洋环境状况公报》显示, 珠江口为劣四类水域, 重度富营养化海域。 针对珠江口水质动态变化, 近年来许多学者就珠江口叶绿素浓度、 悬浮颗粒物浓度反演及监测等方面进行遥感研究, 但对高频光谱水质现场测量工作探索较少。
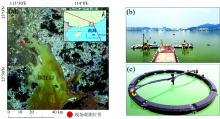
2017年9月20日在图3 (a)展示位置, 珠江河口上横沥水道与蕉门水道交汇处(113°32'38″E, 22°25'43″N)进行了漂浮式光谱测量系统的现场测试。 现场水体照片如图3(b)所示, 水体叶绿素浓度较高, 天气为多云。 图3(c)为现场实验的漂浮式水体光谱测量系统。
 | 图3 (a)漂浮式水体光谱测量系统珠江现场实验位置; (b) 现场观测环境; (c) 漂浮式光谱测量系统现场观测场景Fig.3 (a) Map of the study area and measurement station; (b) Field condition; (c) The deployed FOBY in the field |
现场观测中使用漂浮式水体光谱测量系统在2017年9月20日10:00—16:00在珠江口码头进行光谱测量, 每次测量包括不少于30条离水辐亮度和入射辐照度光谱, 并同步记录对应的仪器姿态。 由于本次测量在静水中进行, 不存在遮光罩漏光及辐亮度探头浸没水面等可能导致数据异常的情况[1]。 研究中按照式(1)计算每组测量的遥感反射率并求30组遥感反射率平均值作为当次测量获得的遥感反射率。
同时, 使用Maya2000 Pro光谱仪进行水面以上法观测, 该仪器的光谱波段为165~1 100 nm, 光谱分辨率在0.41~0.47 nm之间(https://oceanoptics.com/product/maya2000-pro-custom)。 观测几何遵循海洋光学规范推荐的天顶角40°和方位角135°进行观测[11], 选用40%的标准灰板。 由式(2)计算水体遥感反射率, 在本研究中, ρ f通过非线性光谱优化方法和生物光学模型获得[12]。
变异系数(coefficient of variation, CV)可以反映该光谱测量系统连续测量数据的离散程度, 用以评价光谱观测精度及稳定性。 变异系数定义为数据标准差与数据算术平均数的比值, 如式(3)。
式中
研究中使用无偏绝对值百分误差(unbiased mean absolute percentage difference, UMAPD)评价漂浮式水体光谱测量系统与Maya2000 Pro数据差异, 如式(4)。
式中
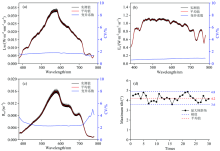
图4(a)和(b)分别展示了漂浮式水体光谱测量系统于2017年9月20日10时16分观测的385~778 nm离水辐亮度及水面入射辐照度光谱。 测量系统在2~3 min内进行了30组数据的连续观测, 表明该系统具有分钟级连续观测能力, 在一定程度上保证水体光谱测量效率。 图4(c)展示了计算得到的385~778 nm遥感反射率。 结果显示遥感反射率在580 nm左右处出现反射峰, 在400 nm左右的蓝光波段, 遥感反射率值比较低, 这主要是因为在400~500 nm范围, 叶绿素a在蓝光波段的吸收和黄色物质在该范围的强烈吸收。
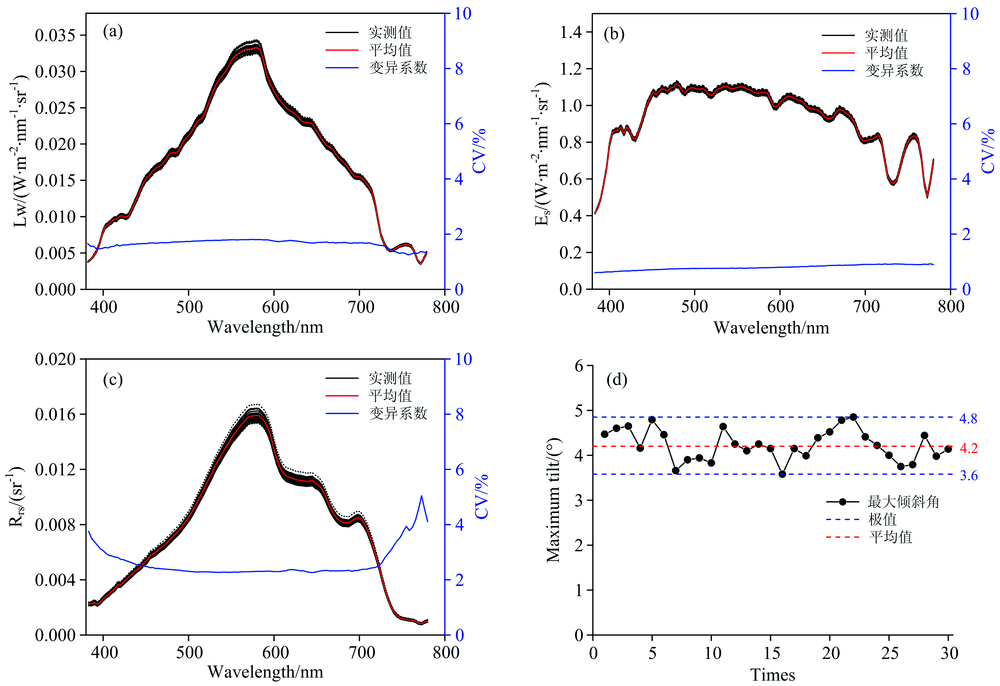 | 图4 2017年9月20日上午10:16珠江口上横沥水道与蕉门水道交汇处(113°32'38E, 22°25'43N) 现场试验测量数据 (a): 离水辐亮度光谱; (b): 水面入射辐照度光谱; (c): 水体遥感反射率光谱; (d): 连续30组观测倾斜角Fig.4 Data measured in the interaction water area (113°32'38E, 22°25'43N between Hengli channel and Jiaomen channel of the Pearl River on September 20, 2017) (a): Lw spectra at 10:16; (b): Es spectra at 10:16; (c): Rrs spectra at 10:16; (d): 30 tilts of consecutive measurements |
如图4(a), (b)和(c)蓝色实线, 现场观测的离水辐亮度变异系数在2%~5%之间, 在400~730 nm的变异系数小于3%; 水面入射辐照度的变异系数在385~778 nm均小于1%; 遥感反射率的变异系数在2%~5%之间, 在400~730 nm的变异系数小于3%。 通过对观测结果和计算得到的遥感反射率变异系数的分析可以看出, 观测系统及传感器有较高的观测精度, 遥感反射率的精度主要受离水辐亮度数据获取质量的影响。
漂浮式水体光谱测量系统每次测量可以在2~3 min内进行30组数据的连续观测, 图4(d)展示了每条光谱测量时间记录的系统倾斜角最大值, 共30个倾斜角数据, 精度为0.1°。 在实验中较为平静水面下, 仪器倾斜角保持低值, 分布范围为3.6°~4.8°, 平均值为4.2°。 且仪器倾角变化不大, 分布集中, 标准差为0.35, 变异系数约为8.3%。 该实验证明漂浮式水体光谱测量系统在实测中能够快速准确地测量每条光谱测量的系统倾斜角, 在较为平静的观测环境下, 倾斜角集中于低值。 在复杂海况的表现仍需要更多的测试实验评价其性能。
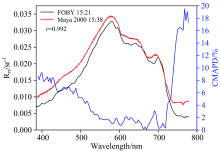
图5展示了15:21漂浮式水体光谱测量系统与15:38 Maya2000 Pro测量获得遥感反射率结果对比。 结果表明, 两者相关系数R=0.992 (p< 0.001), 表明其光谱形状的一致性; 无偏绝对值百分误差在400~735 nm均小于8%, 在505~721 nm小于5%, 表明漂浮式水体光谱测量系统观测与水面之上法观测具有较好的一致性。 两者遥感反射率结果差异与两观测探头分光器、 光谱仪差异有关, 两种观测方法观测角度也有差异, 同时水面之上法数据处理算法中ρ f 具有一定不确定性, 漂浮式水体光谱测量系统受自阴影等因素的影响可能导致测量结果偏低。 两种光谱测量系统的观测差异仍需从算法原理、 控制实验及水体光学模拟等多方面进行深入研究。
 | 图5 15:21漂浮式水体光谱测量系统与15:38水面之上法Maya 2000 Pro测得遥感反射率对比Fig.5 The comparison of the Rrs measured by the water spectral measurement system at 15:21 and Maya 2000 Pro at 15:38 |
为了评估系统的长时序自动观测能力及测量数据稳定性, 分别进行了30 min和3 h的连续现场测试。
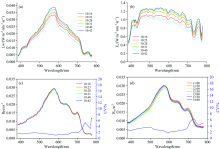
30 min连续观测分别于10:16, 10:23, 10:28, 10:31, 10:40, 10:42对同一水域进行了6组光谱测量。 图6(a)和(b)分别展示了每组观测离水辐亮度及水面入射辐照度平均值, 由于多云天气的影响, 水面入射辐照度变化十分明显, 离水辐亮度也随之变化。 图6(c)展示了由上述同一时刻观测计算得到的水体遥感反射率, 遥感反射率变异系数在385~700 nm不超过2%, 表明了在短时间天气状况动态变化过程中, 漂浮式光谱测量系统观测可以保证获得遥感反射率的稳定性。 3 h连续观测从11:00—14:00每隔30 min获取一次遥感反射率, 每次测量平均值如图6(d), 每组测量的观测精度与单次观测一致, 变异系数保持较低值, 表明在长时序自动观测中, 能保证良好的测量精度; 遥感反射率变异系数在2%~5%之间, 较30 min连续观测结果较高。 计算连续观测遥感反射率光谱的QA(Quality assurance)遥感反射率质量得分[13]均超过0.99, 表明连续观测数据保持较高的质量。 光谱曲线在不同时刻存在差异与太阳高度角的改变和叶绿素浓度及荧光的动态变化有关[14], 表明漂浮式光谱测量系统可在保证观测稳定性同时快速跟踪水体光学特征的动态变化, 大大提高与卫星的匹配效率。
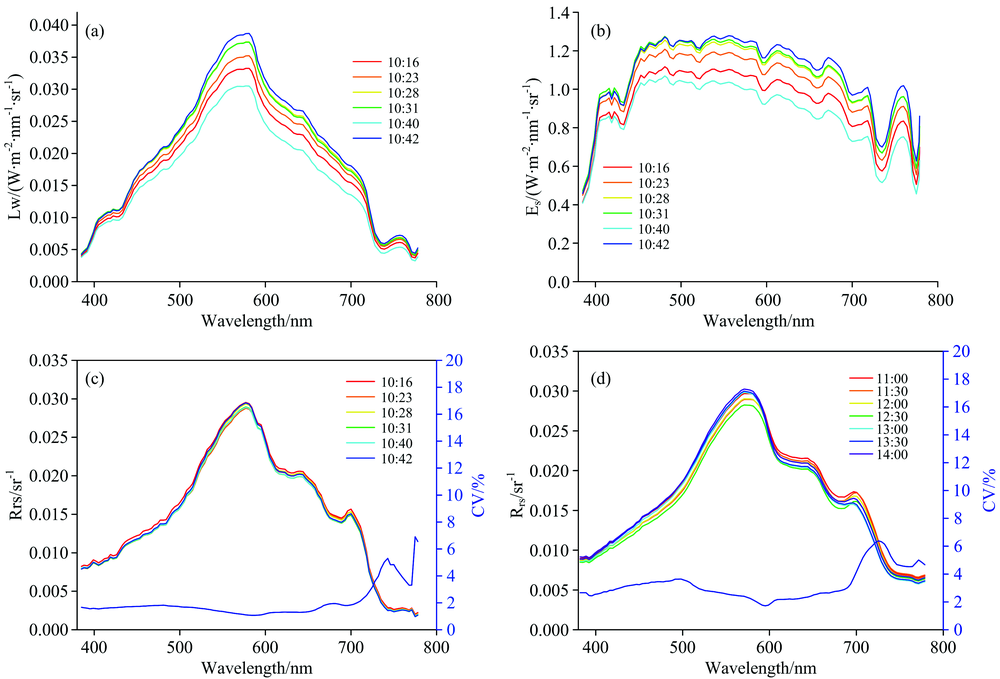 | 图6 漂浮式水体光谱测量系统连续观测实验 (a): 10:16—10:42离水辐亮度光谱比较; (b): 10:16—10:42水面入射辐照度光谱比较; (c): 10:16—10:42遥感反射率光谱比较; (d): 11:00—14:00遥感反射率光谱比较Fig.6 Continuous observation experiment of the water spectral measurement system (a): The comparison of Lw spectra from 10:16—10:42; (b): The comparison of Es from 10:16—10:42; (c): The comparison of Rrs spectra from 10:16—10:42; (d): The comparison of Rrs spectra from 11:00—14:00 |
相对于水面之上法, 天空光遮挡法最大程度避免了人为因素影响, 天空光去除等复杂流程, 若能有持续供电保障, 可以基于天空光遮挡法漂浮式水体光谱测量系统发展漂浮式光学浮标(floating optical buoy, FOBY), 具备长时序大范围漂浮动态跟踪水体光学特性的能力与优势, 但测量系统本身还有几个方面的研究需要深入: (1) 仪器自阴影问题: 根据前人研究, 仪器自阴影可以对离水辐亮度的测量结果产生的影响在1%~20%之间[15], 因此后续研究中要加强仪器阴影对测量结果的影响定量分析, 提出新的测量系统设计方案(如减少探头尺寸, 改圆形气囊为三脚支架结构等)以进一步减小仪器自阴影影响, 同时针对性地发展考虑仪器自阴影影响的数据处理方法, 以保证获取遥感反射率的准确度; (2) 观测数据质量控制: 现场测量中, 由于风浪影响, 遮挡罩浸没水中的高度难以稳定控制, 一方面需要加强水体光学特性与辐射传输模拟研究, 定量评估与修正各种不同类型水体的遮挡罩浸没高度对测量结果的影响; 另一方面加强数据后处理方法研究, 以精确得出水面之上的准确离水辐亮度测量值; (3) 数据高频观测: 现有的观测系统实现了分钟级观测, 可以在2~3 min内快速记录30条光谱, 仍可以通过提高采集频率, 调整积分时间等手段优化设计, 提高观测效率, 以更加准确地获取刚好水面之上的准确离水辐亮度; (4) 姿态记录: 观测系统姿态对于传感器的观测几何有着不可忽略的影响, 一方面可以通过增加姿态传感器记录多维姿态数据结合数据处理方法进行测量数据的校正、 筛选, 另一方面可以在硬件设计中加入常平装置, 保证观测系统处于常平姿态; (5) 多要素联合观测: 除了搭载水体光谱观测传感器, 可以结合其他水质传感器, 进行多种水体要素的联合观测, 建立漂浮式光学浮标服务于水色遥感反演算法; (6) 长时序大范围组网观测: 该系统具有漂浮式光谱测量能力, 需要进一步加强各种不同类型水体场景的测试确保系统的稳定性, 若解决长期供电问题则有望实现长时序大范围组网观测目标。
基于天空光遮挡法的漂浮式水体光谱测量系统的研发情况, 详细阐述了该系统的硬件结构与功能设计。 珠江口连续观测实验分析证明该系统水体光谱测量的精度和稳定性, 并可实现水体光谱分钟级的高频观测以及长时序自动观测, 快速跟踪水体光学特性的动态变化。 基于该系统发展起来的漂浮式光学浮标可用来建立传感器观测网, 实现水体光谱大数据集获取, 从而大大提高现场测量与卫星遥感数据的匹配效率, 也有望大幅提高各种卫星数据水色遥感应用潜力。
未来还需要进一步加强遥感反射率数据获取质量控制, 开展硬件设计优化和数据处理方法研究, 解决仪器自阴影的评估及校正、 遮光罩入水深度控制、 浮标多维姿态记录、 长时序观测的供电保障等问题。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|